SI1133469647

PROTOTYPE PEMANTAU SUMBATAN AIR DENGAN
MENGGUNAKAN RASPBERRY PI PADA
PT. YKK AP INDONESIA

Disusun Oleh :
NIM |
: 1133469647
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI CREATIVE COMMUNICATION AND INNOVATIVE TECHNOLOGY
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2014/2015
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTYPE PEMANTAU SUMBATAN AIR DENGAN
MENGGUNAKAN RASPBERRY PI PADA
PT. YKK AP INDONESIA
Disusun Oleh :
NIM |
: 1133469647
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Creative Communication And Innovative Technology
|
Disahkan Oleh :
Tangerang, 1 Juni 2015
| Ketua |
Kepala Jurusan
| ||||
| STMIK RAHARJA |
Jurusan Sistem Informasi
| ||||
| (Ir. Untung Rahardja, M.T.I) |
(Ferry Sudarto,S.Kom., M.Pd)
| ||||
| NIP : 99001 |
NIP : 10001
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTYPE PEMANTAU SUMBATAN AIR DENGAN
MENGGUNAKAN RASPBERRY PI PADA
PT. YKK AP INDONESIA
Dibuat Oleh :
NIM |
: 1133469647
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And Innovative Technology
Disetujui Oleh :
Tangerang,1 Juni 2015
| Pembimbing I |
Pembimbing II
| ||
| (Jawahir, Ir.,MM ) |
(Fredy Susanto, M.Kom, CCNA.,MTCNA)
| ||
| NID : 03023 |
NID : 04051
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTYPE PEMANTAU SUMBATAN AIR
DENGAN MENGGUNAKAN RASPBERRY PI
PADA PT YKK AP INDONESIA
Dibuat Oleh :
NIM |
: 1133469647
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And innovative Technology
Tahun Akademik 2015/2016
Disetujui Penguji :
Tangerang, 1 Juni 2015
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
PROTOTYPE PEMANTAU SUMBATAN AIR DENGAN
MENGGUNAKAN RASPBERRY PI PADA
PT. YKK AP INDONESIA
Disusun Oleh :
NIM |
: 1133469647
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Creative Communication And Innovative Technology
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
Tangerang, 1 Juni 2015
| NIM : 1133469647
|
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Seiring dengan berkembangnya zaman, saat ini telah banyak diciptakan alat untuk mempermudah manusia dalam melakukan pekerjaannya. Elektronika adalah salah satu dari teknologi yang membantu kehidupan manusia agar menjadi lebih mudah. Salah satu keinginan setiap manusia adalah ingin merasa aman, sehingga orang berusaha untuk membuat suatu alat yang bisa memantau kondisi di sekitarnya tanpa harus dipantau secara langsung dengan mata. Penelitian ini bertujuan untuk membuat prototype alat pemantau sumbatan air yang dapat memudahkan manusia dalam mengatasi pekerjaannya. Alat ini dikendalikan melalui web browser. untuk komponen yang digunakan dalam sistem pemantauan ini adalah teknologi Raspberry Pi dimana sistem tersebut bisa mengambil gambar secara real time dengan bantuan kamera web cam Logitech C170. Web Browser dan Raspberry Pi ini membuat siapa saja mampu mengendalikan perangkat-perangkat yang ada disekitarnya hanya dengan menggunakan sebuah smartphone, laptop, komputer dan IPAD. Penelitian ini diharapkan dapat membantu para pengguna dalam mengetahui sumbatan yang ada pada saluran air bawah tanah serta melakukan pemantauan secara realtime.
Kata Kunci: Web Browser, Raspberry Pi, Pengendalian, Webcam
ABSTRACT
Along with the times, recently there have been found tool to facilitate human’s work. Electronics is one of technology to facilitate human’s work. Every industrial company certainly has an underground water channel as where the flow of rain water and where the flow of wastewater that has been filtered to flow out, so at this point monitoring is required specifically to determine whether there is a blockage that can inhibit the flow of water and causing flooding. This study aims to create a prototype monitoring water blockage that can enable people to monitor underground water channels.This research aims to make robot prototype monitoring water blockage which can facilitate human’s work. This tool is controlled by web browser. for the components used in this monitoring system is the Raspberry Pi technology where the system can take pictures in real time with the help of a web cam Logitech C170 camera. Raspberry Pi Web Browser and this makes anyone capable of controlling the devices around it simply by using a smartphone, laptop,computer and IPAD. This research is expected to help users in knowing that there is a blockage in the underground drains and monitored in realtime.
Keywords : Web Browser, Raspberry Pi, Pengendalian, Webcam
Puji syukur alhamdulillah, penulis panjatkan kehadirat Allah SWT yang telah memberikan seribu jalan, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Skripsi Penulis dapat berjalan dengan baik dan selesai dengan semestinya.
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, penulis mengambil data berdasarkan hasil observasi, wawancara, survey serta studi pustaka yang mendukung penulisan ini.
Hati kecil ini pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan laporan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan yang singkat ini, izinkanlah penulis menyampaikan selaksa pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I selaku Presiden Direktur Perguruan Tinggi Raharja.
- Bapak Drs. PO. Abas Sunarya, M.Si selaku Direktur Perguruan Tinggi Raharja.
- Bapak Sugeng Santoso, M.Kom selaku Pembantu Ketua I Bidang Akademik.
- Bapak Ferry Sudarto, S.Kom., M.Pd. selaku Kepala Jurusan Sistem Komputer.
- Bapak Jawahir, Ir. M.M dan Bapak Fredy Susanto, M.Kom, CCNA.,MTCNA yang telah bersedia menjadi pembimbing I dan II pada penelitian ini.
- Ummi dan Abi, yang telah memberikan dukungan baik moral maupun material.
- Untuk teman-teman tercinta, yang tiada hentinya memberikan saya semangat dan dukungan penuh kepada saya
- Bapak Adi Guritno Subiyanto, yang telah bersedia menjadi stakeholder bagi penelitian skripsi saya ini.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari sempurna. Oleh karena itu kritik dan saran yang membangun, penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, 1 Juni 2015 | |
| Muhammad Syarif | |
| NIM. 1133469647 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 Teori Umum
- 2.2 Teori Khusus
- 2.2.1 Konsep Dasar Raspberry Pi
- 2.2.2 Konsep Dasar Mikrokontroler
- 2.2.3 Konsep Dasar Komponen Elektronika
- 2.2.4 Konsep Dasar Resistor
- 2.2.5 Konsep Dasar Kapasitor atau Kondensator
- 2.2.6 Konsep Dasar Dioda
- 2.2.7 Konsep Dasar Transistor
- 2.2.8 Konsep Dasar Kristal
- 2.2.9 Jaringan Komputer Nirkabel
- 2.2.10 Motor DC
- 2.2.11 Pengendali motor DC / H-bridge
- 2.2.12 Internet Protokol
- 2.2.13 Konsep Dasar Elisitasi
- 2.2.14 Konsep Dasar Literature Riview
- 2.3 Literature Review
- 3 BAB III
- 4 BAB IV
- 5 BAB V
- 6 DAFTAR PUSTAKA
BAB I
Latar Belakang
Perkembangan teknologi dan ilmu pengetahuan pada masa sekarang dirasakan sudah semakin maju, hal tersebut dapat kita lihat dari banyaknya penemuan-penemuan baru di berbagai ilmu. Oleh karena itu pada zaman ini kita perlu untuk mempertahankan kemampuan dalam berkompetisi di bidang teknologi. Teknologi memegang peran penting di era modernisasi seperti saat ini, dimana teknologi tidak dapat dipisahkan dalam kehidupan sehari-hari. Perkembangan teknologi saat ini sudah banyak yang bisa dirasakan masyarakat , salah satunya untuk mempermudah segala macam pekerjaan di bidang industri, pendidikan, pemerintahan dan lain sebagainya.
Monitoring otomatis saluran air bawah tanah pada PT.YKK AP INDONESIA masih belum maksimal dan untuk melakukan pengecekan serta mengetahui jenis sumbatan masih dilakukan secara manual, sehingga masih sulit untuk dilakukan pemantauan terhadap saluran air bawah tanah lebih dalam. Perancangan alat pemantau sumbatan air bawah tanah ini bertujuan untuk mempermudah manusia dalam memeriksa dan memastikan jenis sumbatan yang ada.
Dengan adanya perancangan alat pemantau sumbatan air bawah tanah ini diharapkan dapat digunakan untuk menghindari terjadinya banjir dan mempersingkat waktu dalam mengetahui jenis sumbatan yang ada pada saluran air bawah tanah sehingga dapat dilakukan antisipasi secara langsung.
Dari permasalahan yang penulis sebutkan diatas, maka penulis mengambil judul PROTOTYPE ALAT PEMANTAU SUMBATAN AIR DENGAN MENGGUNAKAN RASPBERRY PI PADA PT YKK AP INDONESIA untuk dijadikan sebagai bahan penelitian.
Rumusan Masalah
Dalam menanggapi permasalahan yang ada di saluran air bawah tanah serta memanfaatkan media elektronik yang ada sehingga bisa digunakan untuk pengendalian sebuah alat kontrol jarak jauh,maka penulis mengidentifikasikan rumusan masalah yang ada sebagai berikut :
-
Bagaimana sistem pemantauan penyebab tersumbatnya aliran air pada PT. YKK AP INDONESIA?
-
Bagaimana merancang dan membuat alat yang mampu memantau saluran air bawah tanah?
-
Bagaimana membuat web interface yang mudah dipahami oleh pengguna untuk mengendalikan alat?
Ruang Lingkup
Sebagai batasan masalah atas penelitian ini agar tetap fokus dan terarah, maka penulis memberikan ruang lingkup laporan sebagai berikut :
-
Penggunaan komputer mini Raspberry Pi sebagai otak utama untuk pengendalian dan koneksi antara alat dengan kamera.
-
Komunikasi antara Web interface dengan alat yang menggunakan Wifi.
-
Penggunaan Web Interface sebagai pengendalian alat.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Dari perumusan masalah di atas maka tujuan penelitian ini adalah :
1. Tujuan Operasional
Tujuan Operasional dari penelitian ini adalah untuk mempermudah pengguna dalam mengetahui penyebab tersumbatnya saluran air bawah tanah yang ada pada perusahaan.
2. Tujuan Fungsional
Tujuan fungsional dari penelitian ini yaitu untuk mengetahui jenis sumbatan yang terdapat disaluran air bawah tanah.
</div>3. Tujuan Individual
- Sebagai syarat kelulusan skripsi pada Jurusan Sistem Komputer, STMIK Raharja.
- Mengimplementasikan dan menerapkan ilmu Sistem Komputer yang didapat selama kuliah.
Manfaat Penelitian
Sebuah karya yang baik adalah karya yang sangat memberikan manfaat. Adapun manfaat yang dihasilkan oleh penelitian ini adalah :
-
Memberikan informasi yang cukup jelas mengenai sumbatan yang ada.
-
Sebagai acuan untuk pengembangan dan pemanfaatan komputer mini Raspberry Pi sebagai sarana pengendalian dan komunikasi.
-
Mampu menggantikan tugas manusia yang berhubungan dengan tugas fisik seperti memeriksa saluran air bawah tanah.
Metode Penelitian
Dalam rangka menghasikan karya yang sesuai dengan teori ilmiah dan tepat, maka dalam penyusunan penelitian ini ada beberapa metode yang digunakan, antara lain :
Metode Pengumpulan Data
Pencarian data dan survey tempat dilakukan langsung di PT. YKK AP Indonesia terhadap kegiatan yang diteliti yaitu dengan melihat saluran air bawah tanah.
-
Observasi : Pencarian data dan survey tempat dilakukan langsung di PT. YKK AP Indonesia terhadap kegiatan yang diteliti yaitu dengan melihat saluran air bawah tanah.
-
Wawancara : Metode ini dilakukan melalui proses tanya jawab dengan stekholder dan pendamping lapangan di tempat atau lokasi terkait objek penelitian yang dilakukan.
-
Studi Pustaka : Metode untuk mendapatkan informasi dan teori-teori yang sesuai dengan sistem yang akan dibuat dengan mencatat, mempelajari dan memahami literature review yang berhubungan dengan penelitian dari berbagai sumber yang tertulis maupun elektronik. Yang digunakan penulis berupa buku-buku, jurnal dan browsing internet.
Metode Perancangan
Metode ini dimaksudkan untuk menghasilkan suatu rangkaian alat yang tepat sehingga diperoleh hasil rancangan yang sesuai dengan yang diinginkan.
Metode Analisa
Metode ini melakukan analisa suatu sistem yang sudah ada, bagaimana sistem itu berjalan dan apakah kekurangan dari sistem tersebut. Pada sistem yang sekarang dalam penggunaannya masih manual, sehingga perlu adanya sistem yang dapat membantu pekerjaan di bidang industri.
Metode Prototype
Metode ini dimaksudkan untuk membuat sebuah model kerja untuk mengetahui kebutuhan user, dan menganalisa kelemahan-kelemahan agar model yang buat memenuhi kebutuhan user.
Sistematika Penulisan
Untuk memahami lebih jelas mengenai laporan ini maka penulis mengelompokkan laporan materi menjadi beberapa sub bab. Hal ini dilakukan untuk memudahkan pembahasan yang nantinya diharapkan dapat tersusun secara sistematis. Sistematika penyampaian laporannya adalah sebagai berikut.
BAB I PENDAHULUAN
Bab ini berisi uraian latar belakang, perumusan masalah, ruang lingkup, metode penelitian, tujuan perancangan, manfaat perancangan, dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini berisi tentang teori dan literature review yang sesuai dan akurat sehingga bisa mendukung penelitian dalam penulisan sehingga menghasilkan karya tulis yang bernilai ilmiah.
BAB III PEMBAHASAN
Bab ini berisikan gambaran dan sejarah singkat PT. YKK AP Indonesia, struktur organisasi, Tujuan Perancangan, Cara Kerja Alat, Diagram Blok, permasalahan yang dihadapi, alternatif pemecahan masalah, Pembuatan alat, software, hardware, Elisitasi.
BAB IV HASIL DAN UJI COBA
Dalam bab ini membahas tentang sistem yang akan diusulkan seperti usulan prosedur sistem berjalan, sistem yang diusulkan, rancangan prototipe, konfigurasi sistem, pengujian, evaluasi, implementasi, dan estimasi biaya.
BAB V PENUTUP
Bab ini berisi kesimpulan dan saran yang berkaitan dengan analisa dan optimalisasi sistem berdasarkan yang telah diuraikan pada bab-bab sebelumnya.
DAFTAR PUSTAKA
DAFTAR LAMPIRAN
BAB II
Teori Umum
Konsep Dasar Sistem
1. Definisi Sistem
Sistem dapat terdiri dari beberapa bagian yang menjadi satu kesatuan tertentu dan dibagi beberapa subsistem atau sistem-sistem bagian. Elemen-elemen atau subsistem-subsistem dalam suatu sistem tidak dapat berdiri sendiri-sendiri, namun saling berinteraksi dan saling berhubungan membentuk satu kesatuan sehingga tujuan atau sasaran dapat tercapai. Berikut ini beberapa pengertian tentang sistem menurut beberapa ahli yang dijabarkan dibawah ini.
Menurut Taufiq (2013:2)[1], “Sistem adalah kumpulan dari sub-sub sistem abstrak maupun fisik yang saling terintegrasi dan berkolaborasi untuk mencapai suatu tujuan tertentu”.
Menurut Sutarman (2012 :13)[2],”Sistem adalah kumpulan elemen yang saling berhubungan dan interaksi dalam satu kesatuan untuk menjalankan suatu proses pencapaian suatu tujuan utama”.
Menurut Hartono (2013:9) [3],”Sistem adalah suatu himpunan dari berbagai bagian atau elemen, yang saling berhubungan secara teroganisasi berdasar fungsi-fungsinya, menjadi satu kesatuan”.
Berdasarkan beberapa definisi sistem yang dikemukakan di atas dapat ditarik kesimpulan bahwa sistem adalah sekumpulan komponen yang berinteraksi dengan satu sama lain untuk mencapai suatu tujuan.
Menurut Sutabri (2012:20)[4], sebuah sistem mempunyai karakteristik atau sifat-sifat tertentu yang mencirikan bahwa hal tersebut bisa dikatakan sebagai suatu sistem. Adapun karakteristik yang dimaksud adalah sebagai berikut:
- Komponen Sistem (Components)
Suatu sistem terdiri dari sejumlah komponen yang saling berinteraksi, yang artinya saling bekerja sama membentuk satu kesatuan. Komponen-komponen sistem tersebut dapat berupa suatu subsistem. Setiap subsistem memiliki sifat dari sistem yang menjalankan suatu fungsi tertentu mempengaruhi proses sistem secara keseluruhan. Suatu sistem dapat mempunyai sistem yang lebih besar atau sering disebut “supra sistem”. - Batasan Sistem (Boundary)
Ruang lingkup sistem yang merupakan daerah yang membatasi antara sistem dengan sistem yang lain atau sistem dengan lingkungan luarnya. Batasan sistem ini memungkinkan suatu sistem dipandang sebagai satu kesatuan yang tidak dapat dipisahkan. - Lingkungan Luar Sistem (Evinronment)
Bentuk apapun yang ada diluar ruang lingkup atau batasan sistem yang mempengaruhi operasi sistem tersebut disebut lingkungan luar. Lingkungan luar sistem ini dapat bersifat menguntungkan dan dapat juga bersifat merugikan sistem tersebut. Dengan demikian, lingkungan luar tersebut harus tetap dijaga dan dipelihara. Lingkungan luar yang merugikan harus dikendalikan. Kalau tidak, maka akan mengganggu kalangsungan hidup dari sistem tersebut. - Penghubung Sistem (Interface)
Media yang menghubung sistem dengan subsistem yang lainya disebut penghubung sistem. Penghubung ini memungkinkan sumber-sumber daya mengalir dari satu subsistem ke subsistem yang lain. Bentuk keluaran dari satu subsistem akan menjadi masukan untuk subsistem lain melalui penghubung tersebut. Dengan demikian, dapat terjadi suatu integrasi sistem yang membentuk satu kesatuan. - Masukan Sistem (Input)
Energi yang dimasukan kedalam sistem, yang dapat berupa pemeliharaan (maintenance input) dan sinyal (signal input). Contoh, didalam suatu unit sistem komputer, “program” adalah maintenance input yang digunakan untuk mengoperasikan komputernya dan “data” adalah signal input untuk diolah menjadi informasi. - Pengolahan Sistem (Process)
Suatu sistem dapat mempunyai suatu proses yang akan mengubah masukan menjadi keluaran, contohnya adalah sistem akuntansi. Sistem ini akan mengolah data transaksi menjadi laporan-laporan yang dibutuhkan oleh pihak manajemen. - Keluaran Sistem (Output)
Hasil dari energi yang diolah dan diklasifikasikan menjadi keluaran yang berguna. Keluaran ini merupakan masukan bagi subsistem yang lain seperti informasi. Keluaran yang dihasilkan adalah informasi. Informasi ini dapat digunakan sebagai masukan untuk pengambilan keputusan atau hal-hal lain yang menjadi input bagi subsitem lain. - Sasaran Sistem (Objective)
Suatu sistem memiliki tujuan dan sasaran yang pasti dan bersifat deterministic. Jika suatu sistem tidak memiliki sasaran maka operasi sistem tidak ada gunanya. Suatu sistem dikatakan berhasil bila mengenai sasaran atau tujuan yang telah direncanakan.
Menurut Sutabri (2012:22)[4] “sistem merupakan suatu bentuk integrasi antara satu komponen dengan komponen lainnya karena sistem memiliki sasaran yang berbeda untuk setiap kasus yang terjadi yang ada di dalam sistem tersebut”. Oleh karena itu , sistem dapat diklasifikasikan dari beberapa sudut pandang diantaranya:
- Sistem Abstrak dan Sistem Fisik
Sistem abstrak adalah sistem yang berupa pemikiran atau ide – ide yang tidak tampak secara fisik, misalnya sistem teologia, yaitu sistem yang berupa pemikiran hubungan antara manusia dengan tuhan, sedangkan sistem fisik merupakan sistem yang ada secara fisik, misalnya sistem komputer, sistem produksi, sistem penjualan, sistem administrasi personalia, dan lain sebagainya. - Sistem alamiah dan Sistem buatan manusia
Sistem alamiah adalah sistem yang terjadi melalui proses alam, tidak dibuat oleh manusia, misalnya sistem perputaran bumi, terjadinya siang malam, dan pergantian musim. Sedangkan sistem buatan manusia merupakan sistem yang melibatkan interaksi manusia dengan mesin yang disebut human machine sistem. Sistem informasi berbasis komputer merupakan merupakan contoh human machine sistem karena menyangkut penggunaan komputer yang berinteraksi dengan manusia. - Sistem Determinasi dan Sistem Probabilistic (interface)
Sistem yang berinteraksi dengan tingkah laku yang dapat diprediksi disebut sistem deterministic. Sistem komputer adalah contoh dari sistem yang tingkah lakunya dapat dipastikan berdasarkan program – program komputer yang dijalankan. Sedangkan sistem yang bersifat probabilistic adalah sistem yang kondisi masa depannya tidak dapat diprediksi karena mengandung unsure probabilistic. - Sistem Terbuka dan Sistem Tertutup
Sistem tertutup merupakan sistem yang tidak berhubungan dan tidak terpengaruh oleh lingkungan luarnya. Sistem ini bekerja secara otomatis tanpa campur tangan pihak luar. Sedangkan sistem terbuka adalah sistem yang berhubungan dan dipengaruhi oleh lingkungan luarnya. Sistem ini menerima masukan dan menghasilkan keluaran untuk subsistem lainnya. - Sistem Kontrol loop terbuka
Menurut Erinofiardi (2012:261)[5], sistem kontrol loop terbuka adalah ”suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian.” - Sistem Kontrol loop tertutup
Menurut Erinofiardi (2012:261)[5], sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan”. - Prototype Jenis I
Prototype jenis I sesungguhnya akan menjadi sistem operasional. Pendekatan ini hanya mungkin jika peralatan prototyping memungkinkan prototype memuat semua elemen penting dari sistem baru. Langkah-langkah pengembangan prototype jenis 1 adalah sebagai berikut: - Mengidentifikasi kebutuhan pemakai
- Mengembangkan prototype
- Menentukan apakah prototype dapat diterima
- Menggunakan prototype
- Prototype Jenis II
Prototype jenis II merupakan suatu model yang dapat dibuang yang berfungsi sebagai alat cetak biru bagi sistem operasional. Pendekatan ini dilakukan jika protorype tersebut hanya dimaksudkan untuk tampilan seperti sistem operasional dan tidak dimaksudkan untuk memuat semua elemen penting. Empat langkah pertama dalam pengembangan prototype jenis II sama seperti untuk prototype jenis I. Langkah-langkah selanjutnya adalah sebagai berikut: - Mengidentifikasi kebutuhan pemakai
- Mengembangkan prototype
- Menentukan apakah prototype dapat diterima
- Menggunakan prototype
Konsep Dasar Kontrol
1. Definisi Kontrol
Menurut Erinofiardi (2012 : 261)[5], “Suatu sistem kontrol otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia (otomatis)”.
Kontrol otomatis mempunyai peran penting dalam dunia industry modern saat ini. Seiring perkembangan kemajuan ilmu pengetahuan dan teknologi, sistem kontrol otomatis telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul disekitarnya dengan cara yang lebih mudah, efisien dan efektif. Kontrol otomatis secara tidak langsung dapat menggantikan peran manusia dalam meringankan segala aktifitasnya.
Berdasarkan ejaan yang disempurnakan (EYD) pengontrolan berasal dari kata kontrol. Kontrol sama dengna pengawasan, pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukan tenaga ahli perencanaan sistem pengendali dan perangcangan desain sistem pengendali termasuk teknisi professional sebagai operator. Tidak menutup kemungkinan bahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungan karena teori sistem pengendali modern dikembangkan guna mengatasi kerumitan yang dijumpai pada berbagai sistem pengendalian yang menuntut kecepatan dan ketelitian yang tinggi dengan hasil output yang optimal.
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan Sistem Pengendali Loop Tertutup ( Closed-loop Control System ).
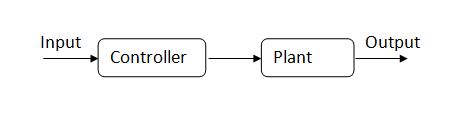
Sumber: Erinofiardi (2012:261) [5]
Gambar 2.1 Sistem Terbuka
Pada Gambar diagram blok 2.1. diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.
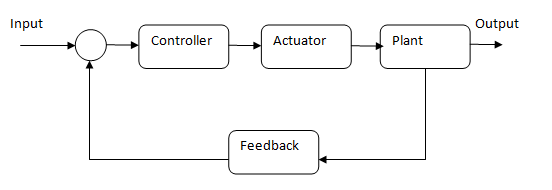
Sumber: Erinofiardi (2012:261) [5]
Gambar 2.2 Sistem Tertutup
Gambar 2.2. diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.
Konsep Dasar Prototype
1. Definisi Prototype
Menurut Simarmata(2010 : 64)[6],” Prototype adalah perubahan cepat didalam perancangan dan pembangunan prototype.
Menurut Wiyancoko (2010 : 120)[7],” prototype adalah model produk yang mewakili hasil produksi yang sebenarnya”. Dari beberapa pendapat yang dikembangkan diatas disimpulkan bahwa prototype adalah proses pembuatan produk dalam perancangan.
2. Pendekatan Prototype
Menurut Sasankar dan Vinay Chavan(2011 : 139)[8],terdapat tiga pendekatan prototyping, yaitu :
a) THROW-AWAY
Prototype dibuat dan dites. Pengalaman yang diperoleh dari pembuatan prototype digunakan untuk membuat produk akhir (final), kemudian prototype tersebut dibuang (tak dipakai).
b) INCREMENTAL
Produk finalnya dibuat sebagai komponen-komponen yang terpisah. Desain produk finalnya secara keseluruhan ada satu tetapi dibagi dalam komponen-komponen lebih kecil yang terpisah ( independent ).
c) EVOLUTIONARY
Pada metode ini, prototype nya tidak dibuang tetapi digunakan untuk interasi berikutnya. Dalam hal ini, sistem atau produk yangsebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatas menuju produk final atau produk akhir. Berikut ini adalah kelebihan prototype :
Berikut ini adalah kelebihan prototype :
- Adanya komunikasi yang baik antara pengembang user.
- Pengembang dapat bekerja lebih baik dalam menentukan kebutuhan user.
- User berperan aktif dalam pengembangan sistem
- Lebih menghemat waktu dalam pengembangan sistem
- Penerapan menjadi lebih mudah karena pemakai mengetahui apa yang diharapkannya.
Berikut ini adalah kekurangan prototype :
- User kadang tidak melihat atau menyadari bahwa perangkat lunak yang ada belum mencantumkan kualitas perangkat lunak secara keseluruhan dan juga belum memikirkan kemampuan pemeliharaan untuk jangka waktu lama.
- Pengembang biasanya ingin cepat menyelesaikan proyek. Sehingga menggunakan algoritma dan bahasa pemrograan yang sederhana untuk membuat prototyping lebih cepat selesai tanpa memikirkan lebih lanjut bahwa program tersebut hanya merupakan cetak biru sistem.
- Hubungan user dengan komputer yang disediakan mungkin tidak mencerminkan teknik perancangan yang baik.
Konsep Dasar Analisa Sistem
1. Definisi Analisis Sistem
Menurut Taufiq (2013:156)[1],“Analisis Sistem adalah suatu kegiatan mempelajari sistem (baik sistem manual ataupun sistem yang sudah komputerisasi) secara keseluruhan mulai dari menganalisa sistem, analisa masalah, desain logic, dan memberikan keputusan dari hasil analisa tersebut”.
Menurut Rosa (2013:18) [9],“Analisis Sistem adalah kegiatan untuk melihat sistem yang sudah berjalan, melihat bagian mana yang bagus dan tidak bagus, dan kemudian mendokumentasikan kebutuhan yang akan dipenuhi dalam sistem yang baru”.
Menurut Henderi (2011:322)[10],“Analisa sistem adalah penguraian dari suatu sistem yang utuh ke dalam bagian-bagian komponennya dengan maksud untuk mengidentifikasikan dan mengevaluasi permasalahan-permasalahan, kesempatan-kesempatan, hambatan-hambatan yang terjadi dan kebutuhan-kebutuhan yang diharapkan sehingga dapat dibuat rancangan sistem yang baru yang sesuai dengan kebutuhan”.
Berdasarkan definisi di atas, maka dapat disimpulkan analisis sistem adalah suatu kegiatan dalam mengidentifikasi permasalahan yang terjadi agar kebutuhan dapat dipenuhi dalam sistem baru.
2. Langkah-langkah Analisa sistem
Menurut Taufiq (2013:159)[1], untuk melakukan analisis sistem, supaya hasil analisis bisa maksimal maka langkah-langkah yang dilakukan juga harus terstruktur agar tidak tumpang tindih antara hasil analisa yang satu dengan hasil analisa yang lain. Atau dengan tujuan hasil analisa sistem yang dilakukan bisa dikelompokkan sesuai dengan langkah yang dilakukan sehingga mudah untuk dipelajari atau dikembangkan lagi ke dalam rancang bangun sistem informasi.
Beberapa urutan langkah yang bisa digunakan dalam analisa sistem Menurut Whitten L. Jeffery (2004) dalam Taufiq, Rohmat.2013 :
- Definisi Lingkup
Definisi lingkup (scope definition) adalah langkah pertama proses pengembangan sistem. Dalam metodologi-metodologi lain hal ini mungkin disebut (preliminary investigation phase), fase studi awal (initial study phase), fase survey (survey phase), atau fase perencanaan (planning phase), komunikasi (communication) atau inisiasi proyek atau pengumpulan kebutuhan. - Analisis Masalah
Analisis masalah menyediakan analisis dengan pemahaman, kesempatan dan atau perintah lebih mendalam yang memicu proyek. Analisa masalah menjawab pertanyaan, “Apakah masalah-masalah tersebut layak untuk dipecahkan!” dan “Apakah sistem yang baru layak untuk dibangun?”. Dalam metodologi lain langkah analisis masalah mungkin dikenal sebagai langkah studi, studi sistem saat ini, langkah penyelidikan terinci, atau langkah analisis kelayakan.
Tujuan analisis masalah adalah mempelajari dan memahami bidang masalah dengan cukup baik untuk secara menyeluruh menganalisis masalah, kesempatan, dan batasannya. - Analisis Persyaratan
Beberapa analisis yang kurang pengalaman membuat kesalahan yang fatal sesudah melalui langkah analisis masalah. Godaan pada titik ini adalah mulai melihat berbagai solusi alternatif, khususnya solusi teknis. Salah satu kesalahan yang kerap terjadi di dalam sistem informasi terbaru ditunjukkan dalam pernyataan, “Memastikan sistem bekerja dan secara teknis mengesankan, tapi ia harus tidak melakukan apa yang kita inginkan untuk dilakukan oleh sistem.” Langkah analisis persyaratan menentukan persyaratan bisnis bagi sitem yang baru. - Desain Logic
Tidak semua proyek mencakup pengembangan model-driven, tapi kebanyakan masukkan beberapa pemodelan sistem. Desain logic lebih lanjut mendokumentasikan persyaratan bisnis dengan menggunakan model-model sistem yang menggambarkan struktur data, proses bisnis, aliran data dan antarmuka pengguna. Dalam hal tertentu, desain logic mensahkan persyaratan yang dibuat pada langkah sebelumnya. - Analisa Kebutuhan
Dengan adanya persyaratan bisnis, maka kita akhirnya dapat menekankan bagaimana sistem baru termasuk altenatif-alternatif berbasis komputer dapat diimplementasikan dengan teknologi. Maksud dari analisa keputusan adalah unutk mengenali solusi kandidat, menganalisa solusi kandidat tersebut dan merekomendasi sebuah sistem target yang akan dirancang, dibangun dan diimplementasikan. Peluang muncul saat ada seseorang yang telah mendapatkan sebuah visi terhadap solusi teknik. Tetapi hamper selalu ada solusi alternatif yang mungkin merupakan solusi yang lebih baik. Selama analisis keputusan memang penting untuk mengenali berbagai pilihan, menganalisa beberapa pilihan tersebut dan menjual solusi terbaik berdasarkan analisis tersebut.
Konsep Dasar Perancangan Sistem
1. Definisi Perancangan Sistem
Menurut Verzello/John Reuter III dalam Darmawan (2013:227)[11], “Perancangan Sistem adalah tahap setelah analisis dari siklus pengembangan sistem: Pendefinisian dari kebutuhan-kebutuhan fungsional dan persiapan untuk rancang bangun implementasi: “menggambarkan bagaimana suatu sistem dibentuk”.
Menurut Al-Jufri (2011:141)[12], “Rancangan Sistem adalah penentuan proses dan data yang diperlukan oleh sistem baru.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan perancangan sistem adalah suatu proses perencanaan untuk membentuk suatu sistem agar dapat berfungsi dan digunakan.
2. Tujuan Perancangan Sistem
Menurut Darmawan (2013:228)[11] , Tahap Perancangan/Desain Sistem mempunyai 2 tujuan utama, yaitu:
- Untuk memenuhi kebutuhan pemakai sistem.
- Untuk memberikan gambaran yang jelas dan rancang bangun yang lengkap pada pemograman komputer dan ahli-ahli teknik yang terlihat (lebih condong pada disain sistem yang terperinci).
3. Tahap-tahap Perancangan Sistem
Menurut Al Jufri (2011:141)[12] , Langkah-langkah tahap rancangan yaitu :
- Menyiapkan Rancangan Sistem Yang Terinici, Analis bekerja sama dengan pemakai dan mendokumentasikan rancangan sistem baru denagan alat-alat yang dijelaskan dengan modul teknis. Bebrapa alat memudahkan analis untuk menyiapkan dokumentasi secara top down, dimulai dengan gambaran besar dan secara bertahap mengarah lebih rinci. Pendekatan top down ini merupakan ciri rancangan terstruktur (structured design), yaitu rancangan bergerak dari tingkat sistem ke tingkat subsistem. Alat-alat dokumentasi yang popular yaitu:
- Diagram arus data (data flow diagram).
- Diagram hubungan entitas (entity relathionship diagram)
- Kamus data. (Data dictionary)
- Flowchart.
- Model hubungan objek.
- Spesifikasi Kelas.
- Mengidentifikasi Berbagai Alternatif Konfigurasi Sistem, Analis mengidentifikasi konfigurasi, bukan merek atau model peralatan komputer yang akan memberikan hasil yang terbaik bagi sistem dalam menyelesaikan pemrosesan.
- Mengevaluasi berbagai Alternatif Konfigurasi Sistem, Analis bekerjasama dengan manager mengevaluasi berbagai alternatif. Alternatif yang dipilih adalah yang paling memungkinkan subsistem memenuhi kriteria kinerja, dengan kendala-kendala yang ada.
- Memilih Konfigurasi Terbaik, Analis mengevaluasi semua konfigurasi subsistem dan mnyesuaikan kombinasi peralatan sehingga semua subsistem menjadi satu konfigurasi tunggal. Setelah selesai analis membuat rekomendasi kepada manager untuk disetujui. Bila manager menyetujui konfigurasi tersebut, persetujuan selanjutnya dilakukan oleh MIS.
- Menyiapkan Usulan Penerapan, Analis menyiapkan usulan penerapan (implementation proposal) yang mengikhtisarkan tugas-tugas penerpan yang harus dilakukan, keuntungan yang diharapkan, dan biayanya.
- Menyetujui atau Menolak Penerapan Sistem, Keputuasan untuk terus pada tahap penerapan sangatlah penting, karena usaha ini akan sangat meningkatkan jumlah orang yang terlibat. Jika keuntungan yang diharapkan dari sistem melebihi biayanya, maka penerapan akan disetujui
4. Flowchart
Menurut Adelia di dalam Jurnal Sistem Informasi (2011:116)[13],“Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Pada pembuatan sebuah sistem kontrol diperlukan sebuah gambar yang akan dapat menjelaskan alur atau langkah-langkah dari sebuah kerja sistem yang dibuat,sehingga dapat memberikan penjelasan dalam bentuk gambar. Flowchart biasanya mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan di evaluasi lebih lanjut. Bila seorang analisi dan programmer akan membuat flowchart, ada beberapa petunjuk yang harus diperhatikan,yaitu:
- Flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
- Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapat dimengerti oleh pembacanya.
- Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas
- Setiap langkah dari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.
- Setiap langkah dari aktifitas harus berada pada urutan yang benar.
- Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
- Gunakan simbol-simbol flowchart yang standart.
Teori Khusus
Konsep Dasar Raspberry Pi
1. Definisi Raspberry Pi
“The Raspberry Pi is a credit sized computer that plug into your TV and a keyboard. It is a capable little computer which can be used in electronics prjocects, and for many things that your desktop PC does, like spreadsheets,word-processing and games. It also plays high definiton video.”
Raspberry Pi adalah sebuah komputer berukuran sebesar kartu kredit yang terhubung ke televisi dan sebuah keyboard. Komputer kecil ini bisa digunakan untuk proyek-proyek elektronik dan hal lainnya yang bisa dilakukan oleh desktop komputer seperti sebagai mesin pengolah kata, games dan perangkat ini juga mampu memainkan video beresolusi tinggi. Richardson dan Wallacemen jelaskan beberapa cara untuk menjelaskan beberapa cara yang dapat dilakukan oleh Raspberry Pi diantaranya sebagai berikut (2013:8) :
a. General Purpose Computing
Perlu diingat bahwa Raspberry Pi adalah sebuah komputer dan memang pada faktanya dapat digunakan sebagai sebuah komputer. Setelah perangkat ini siapuntuk digunakan kita bisa memilih untuk boot langsung kedalam GUI (Graphical User Interface) dan didalamnya terdapat sebuah web browser yang merupakan aplikasi yang banyak digunakan komputer sekarang ini. Perangkat ini juga dapat di install banyak aplikasi gratis seperti Libre Office yang digunakan untuk pekerjaan-pekerjaan kantor.
b. Learning to Program
Raspberry Pi pada dasarnya ditujukan sebagai alat edukasi untuk mendorong anak-anak bereksperimen dengan komputer. Perangkat ini sudah terpasang dengan interpreters dan compilers untuk berbagai bahasa pemrograman. Untuk pemula telah disediakan Scratch, sebuah bahasa pemrograman berasaskan grafik dari MIT. Kita bisa menulis program untuk Raspberry Pi dalam berbagai bahasa seperti C, Ruby, Java, Python, dan Perl.
c. Project Platform
Raspberry Pi membedakan dirinya dari komputer pada umumnya bukan darisegi harga dan ukurannya saja, tapi juga karena kemampuannya berintegrasi dengan proyek-proyek elektronik.
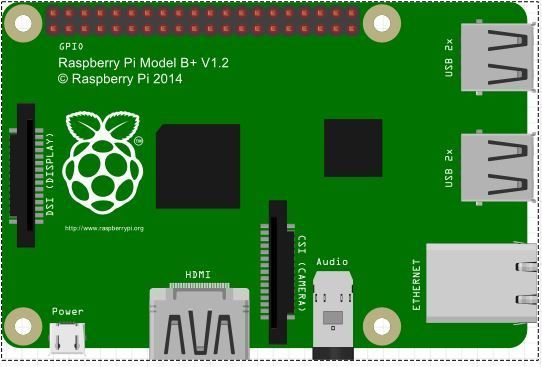
Gambar 2.3 Model Raspberry Pi B+
Berdasarkan Gambar 2.3 Raspberry Pi mempunyai beberapa bagian antara lain adalah sebagai berikut :
- CPU dan GPU
- Memory (RAM)
- Power
- SD Card
- Port HDMI
- Port RCA.
- Konektor Audio.
- LED indikator
- Port USB.
- Port LAN (RJ 45).
- GPIO (General Purpose Input Output)
Prosessor yang digunakan pada Raspberry PI adalah ARM1176JZF-S dengan kecepatan Clock sebsar 700 Mhz dan GPU atau Graphic Processing Unit yang dipakai adalah Video Core IV.
Raspberry Pi model B+ ini menggunakan RAM sebesar 512 MB. RAM ini diletakkan menyatu dengan Prosessor.
Untuk Catu Daya, Raspberry Pi menggunakan konektor Micro USB yang biasa digunakan pada Charger Smartphone Android, catu daya ini bekerja pada tegangan 5V dengan arus minimal 1A agar Raspberry Pi bekerja secara maksimal.
Bagian ini berfungsi untuk tempat memasukkan SD-Card yang sudah diisi dengan salah satu OS Raspberry Pi. OS tersebut adalah Raspbian, Pidora, Arch Linux, Raspbmc, OpenELEC, dll.
Port ini berfungsi untuk menampilkan OS Raspberry pada TV yang mempunyai port HDMI.
Sama seperi port HDMI, port ini berfungsi untuk menampilkan OS Raspberry Pi namun menggunakan Port Video untuk TV model lama.
Berfungsi sebagai konektor untuk Speaker atau Headset.
Terdapat 5 Led yang masing-masing berfungsi sebagai Indikator catu daya, proses kerja CPU, dan proses kerja jaringan.
Selayaknya penggunaan pada komputer, port ini berfungsi untuk menyambungkan berbagai macam perangkat USB seperti Flash Disk, USB Dongle, USB Webcam, Card Reader, dll.
Untuk menghubungkan Raspberry Pi ke Jaringan melalui konektor RJ 45 dan kabel UTP.
Bagian ini merupakan salah satu keunggulan Raspberry Pi dengan Komputer mini sebelumnya, karena pengguna bisa memprogram pin-pin GPIO ini sesuai dengan kebutuhan mereka.
Konsep Dasar Mikrokontroler
1. Definisi Mikrokontroler
Menurut Sumardi (2013:1), [14],“Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data”.
Menurut Dipranoto (2010:3) [15], bahwa “Mikrokontroller adalah sebagai “single chip computer yang memiliki kemampuan untuk diprogram dan digunakan untuk tugas-tugas yang berorientasi control”.
Dari beberapa definisi-definisi diatas dapat disimpulkan bahwa Mikrokontroler sebagai otak/pengatur suatu sistem terkomputerisasi yang didalamnya terdapat beberapa komponen-kompenen yang memiliki fungsi tertentu seperti RAM, ROM, CPU, I/O, Clock dan komponen lainnya dalam sebuah keping tunggal, serta mempunyai input dan output serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data.
2. Karakteristik Mikrokontroler
Menurut Malik dan Mohammad Unggul Juwana (2009:2) [16],karakteristik mikrokontroler mempunyai beberapa komponen-komponen yaitu:
- CPU (Central Procesing Unit)
- RAM (Read Only Memory)
- I/O (Input/Output)
Adapun ketiga komponen tersebut secara bersama-sama membentuk sistem komputer dasar. Beberapa mikrokontroler memiliki tambahan komponen lain, misalnya ADC (Analog Digital Converter), Timer/Counter, dan lain-lain.
Menurut Sumardi (2013:2) [14],mikrokontroler memiliki karakteristik sebagai berikut :
- Memiliki program khusus yang disimpan dalam memori untuk aplikasi tertentu, tidak seperti PC yang multifungsi karena mudahnya memasukkan program. Program mikrokontroler relatif lebih kecil daripada program-program pada PC.
- Konsumsi daya kecil.
- Rangkaiannya sederhana dan kompak.
- Harganya murah , karena komponennya sedikit.
- Unit I/O yang sederhana, misalnya LCD, LED, Latch.
- Lebih tahan terhadap kondisi lingkungan ekstrim, misalnya temperature tekanan, kelembaban, dan sebagainya.
- Klasifikasi Mikrokontroler.
Menurut Malik dan Mohammad Unggul Juwana (2009:3) [16], Mikrokontroler memiliki beberapa klasifikasi yaitu sebagai berikut:
- ROM (Flash Memory) dengan kapasitas 1024 byte (1 KB).
- RAM berkapasitas 68 byte.
- EEPROM (memori data) berkapasitas 64 byte.
- Total 13 jalur I/O (Port B 8 bit).
- Timer/Counter 8 bit dengan prescaler.
- Fasilitas pemrograman di dalam sistem (ICSP = In Circuit Serial Programming).
3. Fitur-fitur Mikrokontroler
Menurut Malik dan Mohammad Unggul Juwana (2009:3)[16] , ada beberapa fitur yang pada umumnya ada di dalam mikrokontroler adalah sebagai berikut :
a. RAM (Random Access Memory)
RAM digunakan oleh mikrokontroler untuk tempat penyimpanan variable. Memori ini bersifat volatile yang artinya akan kehilangan semua datanya jika tidak mendapatkan catu daya.
b. ROM (Read Only Memory)
ROM disebut sebagai kode memori karena berfungsi untuk tempat penyimpanan program yang akan diberikan oleh user.
c. Register
Register merupakan tempat penyimpanan nilai-nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroler.
d. Special Function Register.
Merupakan register khusus yang berfungsi untuk mengatur jalannya mikrokontroler dan register ini terletak di RAM.
e. Input dan Output pin
Pin Input adalah bagian yang berfungsi sebagai penerima signal dari luar dan pin ini dihubungkan ke berbagai media inputan seperti keypad, sensor, keyboard, dan sebagainya. Pin Output adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma mikrokontroler.
f. interrupt
Interrupt merupakan bagian dari mikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program sedang dijalankan, program tersebut dapat diinterupsikan dan menjalankan program interupsi terlebih dahulu.
Menurut Malik dan Mohammad Unggul Juwana (2009:3)[16] , ada beberapa interrupt yang terdapat pada mikrokontroler adalah sebagai berikut:
- Interrupt Eksternal, Interrupt ini akan terjadi ketika ada inputan dari pin interrupt.
- Interrupt Timer, .Interrupt ini akan terjadi ketika waktu tertentu telah tercapai.
- Interrupt Serial, Interrupt ini akan terjadi ketika ada penerimaan data dari komunikasi serial.
Konsep Dasar Komponen Elektronika
1. Definisi Elektronika
Menurut Chandra (2011:9)[17] , “Komponen-komponen elektronika dibagi dalam jenis komponen pasif dan komponen aktif”.
Menurut Rusmadi (2009:10)[18] , komponen elektronika dibagi menjadi 2 kelompok yaitu:
a. Komponen Pasif
Menurut Rusmadi (2009:10)[18] , “Komponen pasif adalah komponen-komponen elektronika yang apabila dialiri aliran listrik tidak menghasilkan tenaga seperti: perubahan tegangan, pembalikan fasa, penguatan dan lain-lain”.
ada beberapa komponen yang termasuk dalam komponen pasif di antaranya adalah:
- Resistor atau Tahanan
- Kapasitor atau Kondensator
- Trafo atau Transformator
b. Komponen Aktif
Menurut Rusmadi (2009:33)[18] , “Komponen aktif adalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatu tenaga baik berbentuk penguatan maupun mengatur aliran listrik yang melaluinya”. ada beberapa yang termasuk komponen aktif antara lain adalah:
- Dioda
- Transistor
- IC ( Integrated Circuit )
- Thyristor atau SCR (Silicon Controller Recifier)
Konsep Dasar Resistor
Menurut John (2010:21) [19] , “Tahanan atau dikenal juga tahanan listrik, resistor atau dengan istilah lain yakni werstan. Besarnya nilai tahanan dinyatakan dalam Ohm ( )”.
Dari pengertian diatas dapat disimpulkan bahwa resistor adalah komponen elektronika yang berfungsi memberikan tahanan atau hambatan arus listrik.
V = I . R
Keterangan :
V = Tegangan listrik (volt)
I = Arus yang mengalir (ampere)
R = Tahanan (ohm)
Untuk mengetahui nilai resistor berdasarkan warnanya dapat dilihat pada table 2.1. sebagai berikut:
Tabel 2.1 Tabel baca Resistor
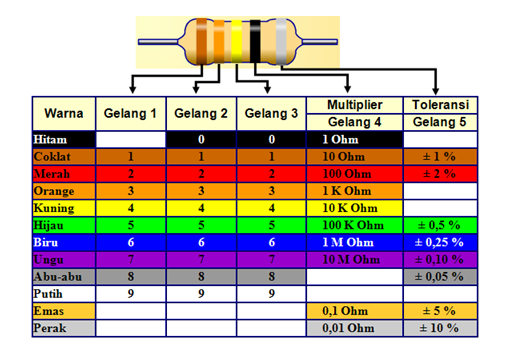
Sumber: Rusmadi (2009:13)[18]
Menurut macamnya resistor terbagi atas dua macam yaitu:
Menurut Rusmadi (2009:11) [18] , “bahwa Resistor tetap adalah resistor yang memiliki nilai hambatan yang tetap tidak dapat diubah-ubah. Apabila nilai tahanannya semakin besar, maka arus semakin kecil. Sebaliknya bila nilai tahanannya kecil, maka arus yang mengalir semakin besar.”.
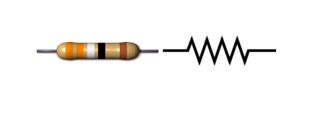
Gambar 2.4 Bentuk fisik dan Simbol resistor tetap
Menurut Rusmadi (2009:16) [18] , bahwa “Resistor tidak tetap adalah resistor yang nilai resistansinya (tahananya) dapat dirubah-rubah sesuai dengan keperluan dan perubahannya dapat dilakukan dengan jalan mengeser atau memutar pengaturnya”. Jenisnya antara lain : hambatan geser, trimpot dan potensiometer. Dimana trimpot dan potensimeter adalah yang paling sering digunakan.
a) Tahanan Variabel adalah jenis tahanan yang resistansinya bisa diubah-ubah, seperti Potensiometer dengan cara diputar dan Trimpot (trimer potensiometer).
b) LDR (Light Dependent Resistance) adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahaya dan membesar apabila tidak terkena cahaya.
c) NTC (negative thermal coeffisien) dan PTC (positive thermal coeffisien) adalah jenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC pada suhu yang tinggi nilai tahanannya turun dan pada suhu yang rendah nilai tahananya naik, sedangkan PTC kebalikannya pada suhu yang tinggi nilai tahanannya naik dan pada suhu yang rendah nilai tahanannya turun. Adapun resistor tidak tetap dapat dilihat seperti pada gambar 2.4. sebagai berikut:
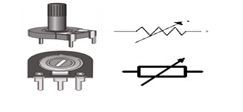
Sumber: http://elektronika-dasar.web.id
Gambar 2.5 Bentuk fisik dan Simbol resistor tidak tetap
Konsep Dasar Kapasitor atau Kondensator
Menurut John (2010:61) [19] , “Kapasitor adalah komponen elektronika yang dapat digunakan untuk menyimpan muatan listrik”.
Pengertian lain kapasitor adalah komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas, elektrolit dan lain-lain.
Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung-ujung kakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuat dengan kapasitansi atau kapasitas. Untuk melihat kontruksi dari kapasitor, dapat dilihat pada gambar 2.5. sebagai berikut:
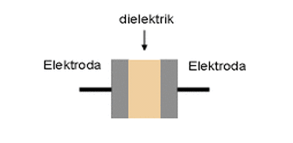
Sumber: http://elektronika-dasar.web.id
Gambar 2.6 Susunan Lapisan Kapasitor
Berikut ini adalah prinsip pembentukan kapasitor :
- Jika dua buah plat atau lebih yang berhadapan dan dibatasi oleh isolasi, kemudian plat tersebut dialiri listrik maka akan terbentuk kondensator (isolasi yang menjadi batas kedua plat tersebut dinamakan dielektrikum).
- Bahan dielektrikum yang digunakan berbeda-beda sehingga penamaan kapasitor berdasarkan bahan dielektrikum. Luas plat yang berhadapan bahan dielektrikum dan jarak kedua plat mempengaruhi nilai kapasitansinya.
- Pada suatu rangkaian yang tidak terjadi kapasitor liar. Sifat yang demikian itu disebutkan kapasitansi parasitic. Penyebabnya adalah adanya komponen-komponen yang berdekatan pada jalur penghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan.
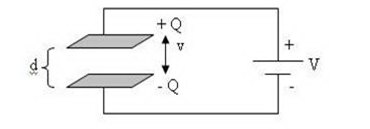
Sumber: http://elektronika-dasar.web.id
Gambar 2.7 Lapisan dalam Kapasitor
Gambar 2.6 diatas menunjukan bahwa ada dua buah plat yang dibatasi udara. Jarak kedua plat dinyatakan sebagai d dan tegangan listrik yang masuk. Besaran Kapasitansi Kapasitas dari sebuah kapasitor adalah perbandingan antara banyaknya muatan listrik dengan tegangan kapasitor dapat ditulis menggunakan rumus sebagai berikut: C = Q / V Jika dihitung dengan rumus C= 0,0885 D/d. Maka kapasitasnya dalam satuan piko farad.
D = luas bidang plat yang saling berhadapan dan saling mempengaruhi dalam satuan cm2.
d = jarak antara plat dalam satuan cm. Bila tegangan antara plat 1 volt dan besarnya muatan listrik pada plat 1 coulomb, maka kemampuan menyimpan listriknya disebut 1 farad. Dalam kenyataannya kapasitor dibuat dengan satuan dibawah 1 farad. Kebanyakan kapasitor elektrolit dibuat mulai dari 1 mikrofarad sampai beberapa milifarad.
Kapasitor seperti juga resistor nilai kapasitansinya ada yang dibuat tetap dan ada yang variabel. Kapasitor dielektrikum udara, kapasitansinya berubah dari nilai maksimum ke minimum. Kapasitor variabel sering kita jumpai pada rangkaian pesawat penerima radio dibagian penala dan osilator. Agar perubahan kapasitansi di dua bagian tersebut serempak maka digunakan kapasitor variabel ganda. Kapasitor variabel ganda adalah dua buah kapasitor variabel dengan satu pemutar. Berdasarkan dielektrikum kapasitor dibagi menjadi beberapa jenis, antara lain:
- kapasitor keramik
- kapasitor film / kapasitor elektrolit
- kapasitor tantalum
- kapasitor kertas
Berdasarkan polaritas kutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu :
- Kapasitor Non-Polar, kapasitor yang tidak memiliki polaritas pada kedua elektroda dan tidak perlu dibedakan kaki elektrodanya dalam pesangannya pada rangkaian elektronika.
- Kapasitor Bi-Polar, yaitu kapasitor yang memiliki polaritas positif dan negatif pada elektrodanya, sehingga perlu diperhatikan pesangannya pada rangkaian elektronika dan tidak boleh terbalik. Kapasitor elektrolit dan kapasitor tantalum adalah kapasitor yang mempunyai kutub atau polar, sering disebut juga dengan nama kapasitor polar. Kapasitor film terdiri dari beberapa jenis yaitu polyester film, poly propylene film.
Konsep Dasar Dioda
1. Definisi Dioda
Menurut John (2010:143) [19] ,“Dioda merupakan alat yang hanya bisa mengalirkan arus DC dalam satu arah, sedang pada arah yang berlawanan ia tidak bisa menghantarkannya. Kalau ia dialiri arus AC maka akan berhasil didapatkan arus DC dari arus AC ini. Karenanya pada sifat yang demikian maka dioda bisa digunakan sebagai perata arus yang biasa dipasang di adaptor”.
Komponen elektronika dengan dua terminal, yang terbentuk dari dua jenis semikonduktor, yaitu type P yang biasa disebut dengan anoda dan type N yang biasa disebut dengan katoda, dimana kemudian kedua semikonduktor ini digabungkan.
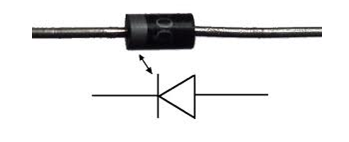
Gambar 2.8. Dioda
Sumber: Rusmadi (2009:33)[18]
Perlu diketahui bahwa komponen dioda ini pada umumnya hampir selalu dipergunakan dalam rangkaian, terutama pada rangkaian Power Supply.
Menurut Rusmadi (2009:34) [18] ,Fungsi diode dalam suatu rangkaian adalah:
- Penyearah tegangan listrik.
- Pengaman tegangan listrik.
- Memblokir tegangn listrik.
Konsep Dasar Transistor
1. Definisi Transistor
Menurut Budiharto (2009:3) [20] ,bahwa “Transistor adalah memiliki 3 terminal biasanya dibuat dari bahan silicon atau germanium”.
Menurut Rusmadi (2009:42) [18],bahwa “Transistor adalah merupakan komponen dasar yang paling penting dan banyak dipergunakan dalam setiap rangkaian”.
Alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam kran listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Gambar 2.9. Transistor
Sumber: Rusmadi (2009:40)[18]
Pada umumnya, transistor memiliki 3 terminal, yaitu Basis (B), Emitor (E) dan Kolektor (C). Tegangan yang di satu terminalnya misalnya Emitor dapat dipakai untuk mengatur arus dan tegangan yang lebih besar daripada arus input Basis, yaitu pada keluaran tegangan dan arus output Kolektor. Transistor disusun menggunakan sambungan dioda. Berdasarkan jenis sambungan transistor dibedakan menjadi dua jenis sebagai berikut.
- NPN (Negative Positive Negative)
- PNP (Positive Negative Positive)
Transistor NPN terdiri dari 1 lapisan semikondutor tipe-P di antara 2 lapisan semikonduktor tipe-n. Arus kecil yang memasuki basis pada emitter dikuatkan di keluran kolektor. Dengan kata lain, transistor NPN hidup ketika tegangan basis lebih tinggi dari pada tengan emitter.
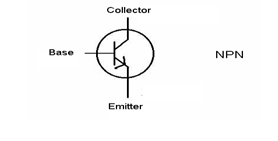
Gambar 2.10. Simbol Transistor NPN
Sumber: Rusmadi (2009:41)[18]
Transistor PNP terdiri dari 2 lapisan semikonduktor tipe-n di antara 2 alpisan semikonduktor tipe-p. arus kecil yang meninggalkan basis pada moda tunggal emitter dikuatkan dikeluran kolektor. Dengan kata lain, transistor PNP hidup ketika tegangan basis lebih rendah dari pada tegangan emitter.
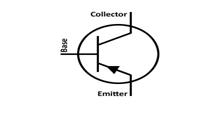
Gambar 2.11. Simbol Transistor PNP
Sumber: Rusmadi (2009:41)[18]
Transistor merupakan komponen yang sangat penting dalam dunia elektronik modern. Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat).
Konsep Dasar Kristal
Berfungsi untuk menghasilkan sinyal dengan tingkat kestabilan frekuensi yang sangat tinggi. Kristal pada oscilator ini terbuat dari quartz atau Rochelle salt dengan kualitas yang baik. Material ini memiliki kemampuan mengubah energi listrik menjadi energi mekanik berupa getaran atau sebaliknya. Kemampuan ini lebih dikenal dengan piezoelectric effect.
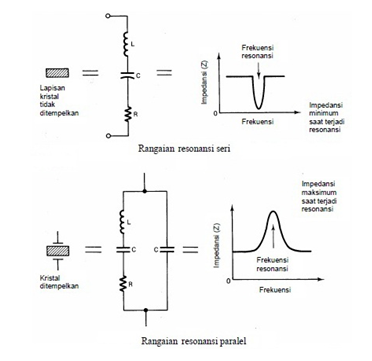
Gambar 2.12. Rangkaian internal kristal
Sumber: http://elektronika-dasar.web.id
Gambar 2.11. diatas memperlihatkan rangkaian setara kristal. Rangkaian setara resonansi seri akan berubah jika kristal ditempatkan pada suatu wadah atau “pemegang”. Kapasitansi akibat adanya keping logam akan terhubung paralel dengan rangkaian setara kristal. Dalam hal ini kristal memiliki kemampuan untuk memberikan resonansi paralel dan resonansi seri.
Jaringan Komputer Nirkabel
Jaringan nirkabel merupakan sebuah LAN dimana transmisi data (pengiriman maupun penerimaan data) dilakukan melalui teknologi frekuensi radio lewat udara, menyediakan sebagian besar keunggulan dan keuntungan dari teknologi lama LAN namun tidak dibatasi media kabel atau kawat.
Muncul dan berkembangnya sistem jaringan nirkabel dipicu oleh kebutuhan akan biaya pengeluaran yang lebih rendah menyangkut infrastruktur jaringan dan untuk mendukung aplikasi jaringan bergerak dalam efisiensi proses, akurasi dan biaya pengeluaran yang rendah dalam hitungan bisnis.
Kemudahan bergerak (Mobilitas) kemudahan bergerak memungkinkan pengguna untuk berpindah-pindah secara fisik ketika menggunakan aplikasi seperti handheld PC (seperti PDA/personal digital assistance dan semacamnya) atau data collector (alat seperti kalkulator yang biasa dibawa untuk pengecekan dan pengisian data).
Aplikasi bergerak membutuhkan jaringan tanpa kabel termasuk semua yang berhubungan atau bergantung pada sistem real time dalam mengakses database biasanya disimpan dalam database yang terpusat. Ada dua jenis jaringan wireless :
- Sebuah “ad-hoc” atau peer-to-peer wireless network yang mencakup sejumlah komputer dimana setiap komponennya dilengkapi dengan kartu antar muka jaringan nirkabel (w-NIC – wireless Network Interface Card). Setiap komputer dapat berkomunikasi secara langsung dengan semua komputer yang tersambung dengan jaringan wireless tadi.
- Sebuah jaringan wireless juga dapat menggunakan access point, atau base station. Pada tipe jaringan wireless ini, access point bekerja seperti layaknya Hub, menyediakan sambungan untuk komputer wireless. Juga dapat menyambungkan (sebagai bridge) dari jaringan local wireless ke jaringan kabel (Wireles LAN to Wired LAN).
Standar yang digunakan pada perangkat wireless yang di gunakan oleh IEEE (Institute of Electrical and Electronics Engineers) adalah 802.11. untuk lebih melenhkapi, akan di jelaskan beberapa protokol pada wireless LAN sebagi berikut:
- 802.11b, Pertama kali digubakan sekitar akhir tahun 1999 dengan menggunakan frekunsi 2,4 GHz, maksimun bandwith yang dapat dicapai adalah 11 Mbps (Mega bit per second), radio sinyal yang digunakan adalah DSSS( Direct Sequence Spreed Spectrum ). Kanal yang tidak overlapping ada 3 (yaitu kanal 1, kanal 6, dan kanal 11). Kompitibel dengan tipe g jika dijalankan pada mode mixed.
- 802.11a, Digunakan pada akhir tahun 2001 dengan menggunakan frekunsi 5,8 GHz. Maksimum bandwith yang bisa dicapai 54 Mbps, radio sinyal yang digunakan adalah OFDM. Kanal yang tidak overlapping 12 (bisa lebih) dan tidak kompitibel dengan tipe b dan g.
- 802.11g, Digunakan pada pertengahan tahun 2003 dengan menggunakan frekuensi 2,4 GHz, maksimum bandwith yang bisa dicapai pada awal pertama kali keluar sebesar 54 Mbps. Dengan berkembangnya teknologi, sekarang ini tipe g sudah bisa mencapai 108 Mbps.
- 802.11a/g, Digunakan mulai pertengahan tahun 2003 dengan menggunakan frekuensi 2,4 GHz dan 5,8 GHz, maksimum bandwith yang bisa dicapai adalah 5,4 GHz, modulasi sinyal yang digunakan OFDM. Tipe a/g ini diberi keleluasaan untuk menggunakan salah satu dari protokol; yang dapat digunakan pada jaringan Wi-Fi.
Motor DC
Menurut Isma, Triad an drajat ( 2011:2 ) [21], ”motor DC adalah suatu mesin yang berfungsi untuk mengubah tenaga listrik arus searah (DC) menjadi tenaga mekanik (putaran). Motor bekerja berdasarkan prinsip induksi elektromagnetik”.
Menurut winarno dan Arifianto (2011:60)[22], "Motor DC adalah jenis motor elektrik yang bekerja pada arus searah. motor jenis ini sering digunakan pada robot bergerak, karena tipe motor dapat disesuaikan dengan kebutuhan robot".
Menurut Gridling dan Weiss (2007:142)[23],Motor DC adalah motor yang menggunakan DC (Direct Current) atau arus langsung untuk mendapatkan gerak perputarannya. Motor ini mempunyai dua pin yang mengontrol kecepatan dan arah dari putaran motornya.
Sumber: Gridling dan Weiss (2007:142)[24]
Gambar 2.13. Motor DC
Menurut Gridling dan Weiss (2007:142)[23], Motor DC terbagi menjadi dua jenis yaitu:
- Motor DC dengan sikat (Brushes)
- Motor DC tanpa sikat (Brushless)
MPada motor DC ini, badan luar motor (stator) menghasilkan medan magnet yang konstan (tetap), dimana rotor mengandung satu set gulungan kabel yang menggunakan hukum lorentz.
Motor DC tanpa sikat mempunyai magnet permanen sebagai rotornya dan beberapa pasang gulungan kabel yang menghasilkan medan elektromagnetik yang berputar.
Pengendali motor DC / H-bridge
Menurut Gridling dan Weiss (2007:145)[23], H-bridge adalah sirkuit pengontrol motor DC yang terdiri dari empat transistor.
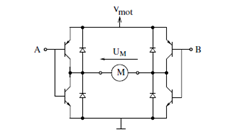
Sumber: Gridling dan Weiss (2007:145)[24]
Gambar 2.14 H-bridge untuk Pengendali Motor DC
H-bridge terdiri dari dua buah tiang push-pull drivers, yang disebut half-bridges yang tersambung diantara motor DC. Empat buah dioda yang berputar memastikan tegangan yang dihasilkan tidak merusak transistor pada saat motor DC tiba-tiba mati. H-bridge memberikan kendali motor dengan dua sinyal digita A dan B (lihat Gambar 2.30) yang masing-masing mengontrol half-bridge. Jika salah satu half-bridge mempunyai masukan HIGH (transistor atas tertutup) dan masukan lainnya LOW (transistor bawah tertutup), maka beda tegangan akan diterapkan pada pin motor dan akan membuat gerak perputaran. Dengan membalik status masukan tadi akan membuat motor berputar ke arah yang berlawanan, yang akan memberikan H-bridge kendali untuk arah.
Internet Protokol
Menurut Imam Riadi ( 2011:72 ) [25] , “Transmission Control Protocol/Internet Protocol (TCP/IP) merupakan protokol untuk mengirim data antar komputer pada jaringan”.
Protokol ini merupakan protokol yang digunakan untuk akses Internet dan digunakan untuk komunikasi global. TCP/IP terdiri atas dua protokol yang terpisah. TCP/IP menggunakan pendekatan lapisan (layer) pada saat membangun protokol ini. Dengan adanya pendekatan berlapis ini memungkinkan dibangunnya beberapa layanan kecil untuk tugas-tugas khusus. TCP/IP terdiri dari lima layer, yaitu:
- Layer Application, di dalam layer ini aplikasi seperti FTP, Telnet, SMTP, dan NFS dilaksanakan.
- Layer Transport, di dalam layer ini TCP menambahkan data transport ke paket dan melewatkannya ke layer Internet.
- Layer Internet, layer ini mengambil paket dari layer transport dan menambahkan informasi alamat sebelum mengirimkannya ke layer network interface.
- Layer Network Interface, di dalam layer ini data dikirim ke layer physical melalui device jaringan.
- Layer Physical, layer ini merupakan sistem kabel yang digunakan untuk proses mengirim dan menerima data.
</ol>
TCP/IP dikirimkan ke setiap jaringan lokal sebagai subnet yang masing-masing subnet telah diberi alamat. IP yang menggunakan pengalamatan disebut dengan IP Address. Internet Protocol (IP) berfungsi menyampaikan paket data ke alamat yang tepat. Oleh karena itu Internet Protocol memegang peranan yang sangat penting dari jaringan TCP/IP. Karena semua aplikasi jaringan TCP/IP pasti bertumpu kepada Internet Protocol agar dapat berjalan dengan baik. Suatu datagram bisa saja tidak sampai dengan selamat ke tujuan karena beberapa hal berikut:
- Adanya bit error pada saat pentransmisan datagram pada suatu medium.
- Router yang dilewati men-discard datagram karena terjadinya kongesti dan kekurangan ruang pada memori buffer
- Putusnya rute ke tujuan untuk sementara waktu akibat adanya router yang down
- Terjadinya kekacauan routing, sehingga datagram mengalami looping
Setiap protokol memiliki bit-bit ekstra diluar informasi/data yang dibawanya. Selain informasi, bit-bit ini juga berfungsi sebagai alat kontrol. Dari sisi efisiensi, semakin besar jumlah bit ekstra ini, maka semakin kecil efisiensi komunikasi yang berjalan. Sebaliknya semakin kecil jumlah bit ekstra ini, semakin tinggi efisiensi komunikasi yang berjalan. Disinilah dilakukan trade-off antara keandalan datagram dan efisiensi. Sebagai contoh, agar datagram IP dapat menemukan tujuannya, diperlukan informasi tambahan yang harus dicantumkan pada header ini.
IP (Internet Protocol) address (alamat IP) adalah suatu identitas yang unik dari suatu host atau komputer pada jaringan (network). Format alamat dari IP adalah W.X.Y.Z. Dimana masing-masing huruf tersebut terdiri dari 8 bit, sehingga apabila ditampilkan dalam bentuk desimal menjadi berupa angka dari 0-255 dan dipisahkan oleh notasi titik (dot).
Konsep Dasar Elisitasi
1. Definisi Elisitasi
Menurut Sommerville and Sawyer (1997) dalam Siahaan (2012:66) [26] , “Elisitasi kebutuhan adalah sekumpulan aktivitas yang ditunjukkan untuk menemukan kebutuhan suatu sistem melalui komunikasi dengan pelanggan, pengguna sistem, dan pihak lain yang memiliki kepentingan dalam pengembangan sistem”.
Menurut Guritno (2011:302)[27], “Elisitasi merupakan rancangan yang dibuat berdasarkan sistem baru yang diinginkan oleh pihak manajemen terkait dan disanggupi oleh penulis untuk dieksekusi.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan bahwa elisitasi adalah suatu rancangan pada sebuah sistem yang diinginkan pengguna dan pihak yang terkait untuk dilakukan pengembangan.
2. Tahap-Tahap Elisitasi
Menurut Guritno dan kawan-kawan (2011:302)[27] elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu :
a. Elisitasi Tahap I
Elisitasi tahap I, berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara.
b. Elisitasi Tahap II
Elisitasi tahap II, merupakan hasil pengklasifikasian elisitasi tahap I berdasarkan Metode MDI. Metode MDI bertujuan memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh penulis untuk dieksekusi.
Berikut penjelasan mengenai Metode MDI :
- (M) pada MDI berarti Mandatory (Penting). Maksudnya, requirement tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
- (D) pada MDI berarti Desirable. Maksudnya, requirement tersebut tidak terlalu penting dan boleh dihilangkan. Namun, jika requirement tersebut digunakan dalam pembentukan sistem maka akan membuat sistem tersebut lebih sempurna.
- (I) pada MDI berarti Inessential. Maksudnya, requirement tersebut bukanlah bagian sistem yang dibahas, tetapi bagian dari luar sistem.
c. Elisitasi Tahap III
Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklasifikasikan kembali melalui metode TOE, yaitu :
- T artinya Teknikal, bagaimana tata cara atauteknik pembuatan requirement dalam sistem diusulkan ?
- O artinya Operasional, bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan ?
- E artinya Ekonomi, berapakah biaya yang diperlukan guna membangun requirement di dalam sistem ?
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu :
- High (H) : Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal. Maka requirement tersebut harus dieleminasi.
- Middle (M) : Mampu dikerjakan.
- Low (L) : Mudah dikerjakan.
d. Final Elisitasi
Final Draft elisitasi, merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan dikembangakan.
Konsep Dasar Literature Riview
1. Definisi Literature Riview
Menurut Guritno, Sudaryono dan Untung Rahardja (2010:86) [27] , “Literature review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama”.
Jadi kesimpulannya, Literatur Review dilakukan oleh peneliti untuk mengetahui landasan awal dan sebagai pendukung bagi kegiatan penelitian yang dilakukan oleh peneliti, sehingga dapat melakukan pengembangan ketingkat yang lebih tinggi dalam rangka menyempurnakan atau melengkapi penelitian yang telah ada.
Literature Review
Beberapa literature review yang menjadi acuan dari penelitian ini adalah sebagai berikut:
- Penelitian yang telah dilakukan oleh Kurniawan (2010) yang berjudul ”Pengontrolan Alat Elektronik Rumah Tangga Menggunakan Mikrokontroler AT89S52 berbasis WEB” diusulkan untuk memperbaiki kekurangan yang ada pada penelitian sebelumnya, dimana kekurangan pada penelitian sebelumnya tersebut masih belum terintegrasi dengan baik. Untuk memperbaiki dan mengembangkan sistem pada penelitian sebelumnya, maka pada penelitian ini menggunakan metode berbasis Internet Protocol (IP) dengan aplikasi Visual Basic. Namun, upaya tersebut masih belum dapat diimplementasikan dan belum optimal karena pada sistem ini masih menggunakan beberapa alat, sehingga proses pengontrolan kurang efisien. Penelitian ini juga melakukan pengendalian motor servo sebagai tindak lanjut dari penelitian yang peneliti lakukan.
- Penelitian yang dilakukan oleh Nurdansyah dari STMIK Raharja yang berjudul “HOME APPLIANCES CONTROLING WITH MOBILE DEVICE BASED ON ANDROID OS” pada tahun 2013. Penelitian ini membahas tentang pengendalian peralatan rumah menggunakan smartphone android menggunakan media jaringan wireless. Kelebihannya alat tersebut menggunakan wireless sehingga bisa dikendalikan jarang yang cukup jauh dan bisa menggunakan mobile based device. Kelemahannya gangguan dalam hal jaringan.
- Penelitian yang dilakukan oleh Haerul Nurdiana dari Perguruan Tinggi Raharja yang berjudul “PEMANTAUAN RUANG KOMPUTER MENGGUNAKAN KOMPUTER MINI RASPBERRY PI B PADA SMPN 1 PASARKEMIS” pada tahun 2013. Penelitian ini menjelaskan tentang pemantauan sebuah ruangan komputer menggunakan web browser. Kelebihannya alat tersebut menggunakan wireless sehingga bisa dikendalikan oleh jarak yang cukup jauh. Kelemahannya gangguan dalam jaringan.
- Penelitian yang dilakukan oleh Ilham Janu Saputro (2010) yang berjudul “Robot Internet Nirkabel”. Penelitian ini membahas tentang mengendalikan robot secara remote lokal, yang dapat dilakukan dengan memanfaatkan protokol TCP/IP. Robot Internet Nirkabel ini juga dapat dikendalikan melalui jaringan internet dengan menggunakan Web Browser yang membuka Interface web robot melalui internet. Akan tetapi dibutuhkan sebuah teknologi Port Forwarding untuk bisa menghubungkan jaringan robot internal dengan jaringan ip publik yang diberikan oleh Internet Service Provider (ISP). Teknologi Port Forwarding dilakukan dengan cara menyamakan port dari router yang terhubung dengan IP publik dengan port yang berada pada wireless robot. Kemudian akan didapatkan sebuah kombinasi IP publik dengan port yang akan menjadi IP publik dari robot.
- Penelitian yang dilakukan oleh Indra Pati Andhika Pribadidari Universitas Gunadarma yang berjudul “ROBOT PENGINTAI MENGGUNAKAN PC BERBASIS MIKROKONTROLER AT89S51” pada tahun 2012. Jurnal ini membahas tentang pengintaian yang dilakukan oleh robot dan di kontrol oleh pengguna melalui sebuah komputer untuk memantau keadaan sekitar melalui kamera yang terpasang. Kelebihannya mengurangi resiko bahaya bagi manusia dan alat tersebut menggunakan wireless sehingga bisa dikendalikan jarang yang cukup jauh. Kelemahannya gangguan dalam jaringan.
Dari beberapa sumber literature review di atas, dapat diketahui bahwa penelitian tentang mikrokontroler, Web browser dan pengontrolan secara nirkabel sudah banyak dibahas. Tapi belum ada penelitian membuat kontrol alat pemantau yang mampu berjalan diatas air. Untuk itu saya melakukan penelitian untuk kemajuan teknologi yang sekarang ini sudah berkembang dengan pesat. Sehingga pengontrolan dapat dilakukan lebih mudah dengan menggunakan web browser .
BAB III
Gambaran Umum Perusahaan
Sejarah Singkat PT. YKK AP INDONESIA
PT YKK AP Indonesia berdiri pada tanggal 24 September 1988 bermula dengan nama PT. YKK Alumico Indonesia, kepanjangan dari Yoshida Kogyo Kabushiki Kaisha. Kemudian pada tahun 2006 berganti nama menjadi PT. YKK AP Indonesia sampai dengan sekarang. PT YKK AP Indonesia memiliki wilayah yang luas dan berada pada Kawasan Industri Manis Tangerang. PT YKK AP Indonesia merupakan perusahaan industri yang bergerak di bidang logam alumunium dan merupakan perusahaan patungan antara YKK Coorporation Japan, PT. YKK Indonesia Zipper dan PT. Multi Rahardja Eka.
YKK AP merupakan perusahaan industri logam yaitu aluminium yang diolah menjadi berbagai jenis barang untuk keperluan industri maupun pembuatan perumahan dan pembuatan gedung. Saat ini sudah banyak perumahan dan gedung-gedung di Indonesia yang menggunakan aluminium dari YKK AP Indonesia.
Di jepang YKK sudah menguasai market untuk rumah tinggal. Saat ini hampir seluruh rumah di jepang menggunakan jendela aluminium. Setelah melakukan riset pemasaran dan perilaku konsumen yang ada di Indonesia, YKK mengembangkan produk jendela perumahan yang disebut M-Series. Produk ini memiliki 2 macam warna yaitu standart Anolize Plus coklat mengkilap dan power coating putih. Produk ini mulai dipasarkan pada tahun 1994 dan dengan kelebihan produk yang dimiliki disbanding kayu, saat ini mulai banyak pemilik rumah pribadi yang beralih menggunakannya.
Tidak hanya itu, YKK AP juga memproduksi aluminium batangan dan parts aluminium untuk industri. Hal ini dikarenakan sebagian besar alloy aluminium mempunyai daya tahan yang tinggi terhadap berbagai korosi. Aluminium yang telah berbentuk alloy dengan campuran dan proses pemanasan yang tepat akan menghasilkan kekuatan tarik sampai 700 Mpa (Megapascal).

Gambar 3.1. Halaman Depan PT. YKK AP Indonesia
Aluminium merupakan penghantar panas yang bagus, sifat ini menyebabkan aluminium banyak digunakan untuk menggantikan tembaga (cooper). Sifat aluminium yang non magnetic dan tidak terbakar merupakan sifat yang banyak diperlukan oleh dunia industri modern terutama industri otomotif atau industri lainnya. Seiring dengan perkembangan jaman, kini telah tersedia banyak pilihan berbagai tipe pintu jendela dari aluminium. Dengan model atau jenis yang lebih artistic dan lebih modern dibandingkan dari kusen berbahan dasar kayu.
Dengan perkembangan permintaan konsumen yang semakin meningkat maka PT. YKK AP Indonesia mengembangkan produknya bukan hanya sekedar kusen pintu dan jendela atau hanya untuk industry tetapi berkembang dengan produk andalannya yaitu certain wall yang dikhususkan untuk gedung pencakar langit.
Beberapa visi yang akan dicapai, yaitu :
- Memberikan kepuasan kepada konsumen dan karyawan berkontribusi untuk daerah dan Negara.
- Sebagai pembuat aluminium window yang memiliki brand image paling baik di ASEAN dan Asia Selatan.
- Bertekad menjadi perusahaan seratus juta dollar dengan mempertahankan harga yang kompetitif dan operating profit yang paling bagus di YKK AP group
Struktur Organisasi PT. YKK AP INDONESIA
Struktur organisasi dalam suatu perusahaan menunjukkan kedudukan tugas, wewenang dan tanggung jawab di dalam suatu organisasi tersebut, dengan adanya kedudukan tugas, wewenang dan tanggung jawab yang jelas di dalam suatu organisasi akan berdampak positif bagi perusahaan tersebut dan tercapainya tujuan perusahaan. Kekuasaan tertinggi PT.YKK AP Indonesia berada di tangan Presiden Direktur yang dibantu oleh General Manager dan Kepala-kepala bagian yang membawahi sub bagian. Adapun struktur organisasi pada PT. YKK AP Indonesia untuk profile departemen, kekuasaan dan yang bertanggung jawab atas semua kegiatan order dan pada profile departemen dipegang oleh Manager Profile Departemen.
Adapun struktur organisasi pada PT. YKK AP Indonesia kekuasaan tertinggi dipegang oleh Presiden Direktur. Kemudian yang bertanggung jawab atas penerimaan order adalah pada bagian sales. Kemudian setiap order yang masuk akan diteruskan ke departemen produksi misalnya departemen profile. Pada Profile Departemen kekuasaan dan yang bertanggung jawab dalam flow profile aluminium dari proses awal hingga proses pengiriman adalah Manager Profile Departemen. Dan yang bertanggung jawab atas penerimaan order dan pengeluaran dokumen-dokumen pada bagian profile bussines, setelah itu scheduling produksi pada bagian PPIC yang sekaligus memonitor proses produksi hingga ke pengirimannya.
Setelah PPIC melakuan scheduling kemudian bagian Extrusi memualai proses produksi dan pemilahan material, disini berperan beberapa sub bagian seperti pemilahan material pada material control, kemudian pewarnaan pada surface atau painting. Kemudian proses pengasemblingan. Tetapi khusus untuk order industri pada Profile Departemen tidak melalui proses pengasemblingan atau perakitan, karena biasanya order industri berupa material profile batangan.
Setelah proses pemilahan dan produksi maka material profile yang siap dikirim diperiksa kelayakannya oleh bagian QA/QC dibagian ini akan dicheck kelayakannya sebagai barang yang siap kirim. Stelah barang /profile melewati bagian QA/QC dan layak kirim maka, barang/profile akan diteruskan ke bagian shipping.
Pada bagian shipping inilah semua barang yang akan dikirim ke costumer dikumpulkan untuk dilakukan pengiriman. Setiap barang/profile yang telah selesai di produksi / packing akan diberikan identitas barang dengan dikeluarkannya SP ( Spesification of Packing ) , setelah SP dikeluarkan maka surat atau dokumen tersebut diteruskan ke bagian PPIC untuk dibuatkan surat DO ( Delivery Order ) dan invoice yang kemudian akan dilakukan penagihan ke costumer atau ke supplier. Berikut adalah gambar struktur organisasi PT. YKK AP Indonesia :
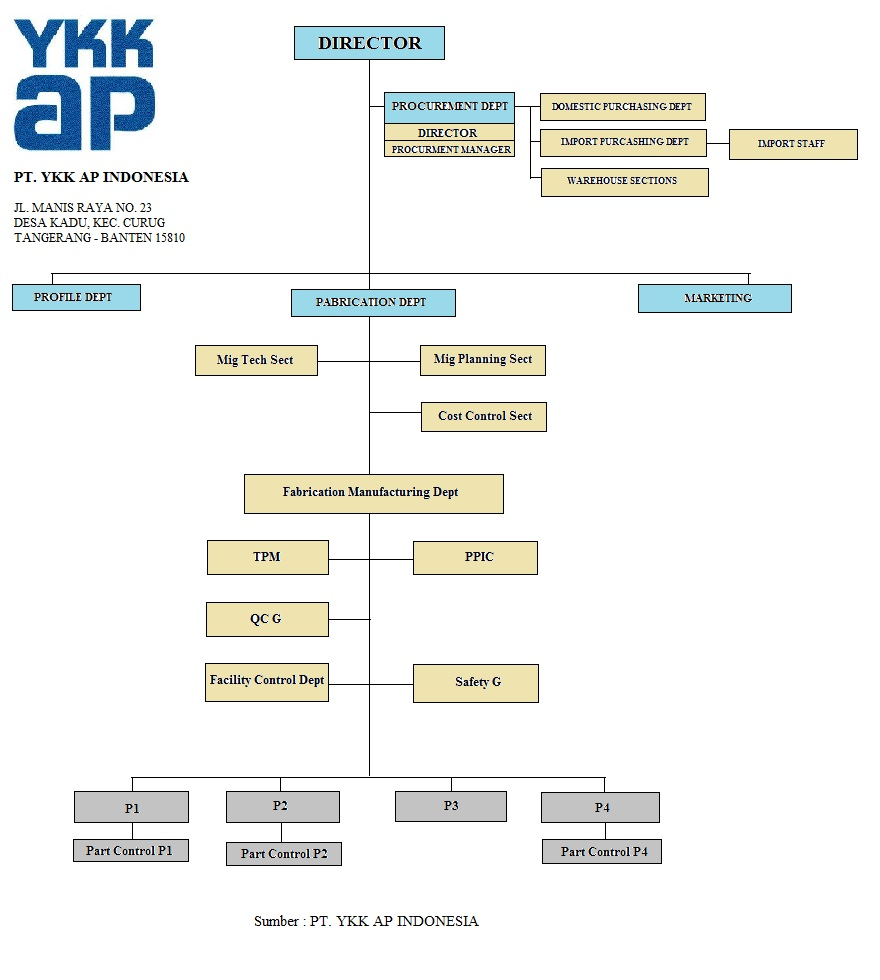
Gambar 3.2. Struktur Organisasi
Tugas dan Tanggung Jawab
Organisasi merupakan suatu kerjasama antara dua orang / sekelompok orang atau lebih untuk mencapai tujuan bersama. Dimana selalu terdapat dua macam hubungan antara sekelompok orang yang disebut atasan dan sekelompok orang lain yang disebut bawahan yaitu yang menjalankan tugas dan fungsinya sesuai dengan jabatannya.
Dalam struktur organisasi PT. YKK AP Indonesia dapat dijabarkan dengan pembagian tugas, tanggung jawab dan wewenang dari masing-masing departemen/section. Secara garis besar adalah sebagai berikut :
- Presiden Director
- Bertanggung jawab dalam program peningkatan kualitas perusahaan.
- Bertanggung jawab atas segala hubungan administrasi seperti, kebijaksanaan personal, akuntansi, serta hubungan dengan masyarakat.
- Sales
- Bertanggung jawab dalam hal promosi produk perusahaan ke costumer ataupun supplier
- Bertanggung jawab dalam lalu lintas penerimaan order dan bertanggung jawab atas segala pemasukan order yang diterima oleh perusahaan.
- Accounting
- Bertanggung jawab atas semua transaksi baik pemasukan ataupun pengeluaran yang dilakukan perusahaan.
- Bertanggung jawab dalam penagihan setiap invoice yang dikeluarkan ke costumer.
- Profile Manager
- Membawahi dan mengawasi sistem kerja pada Manajemen Departemen Profile.
- Mempertanggung jawabkan seluruh pekerjaan yang dilakukannya pada Presiden Director
- Membawahi setiap sub section yang ada di Profile departemen dan mengawasi kinerja Produksi pada profile departemen.
- Manager PPIC Profile
- Bertanggung jawab atas scheduling produksi dan pengiriman barang/profile.
- Bertanggung jawab atas pengeluaran surat DO ( Delivery Order ) dan dokumen yang berhubungan dengan order produksi dan pengiriman.
- Mempertanggung jawabkan setiap kegiatan yang berhubungan dengan penerimaan order hingga pengiriman kepada manager profile departemen.
- Manager Produksi
- Bertanggung jawab atas berjalannya proses poduksi dilapangan.
- Bertanggung jawab setiap proses produksi kepada Manager Profile Departemen.
- Shipping/Delivery
- Bertanggung jawab atas semua pengiriman profile dan sampai keterangan costumer
- Bertanggung jawab mengeluarkan surat surat kiriman seperti S/P ( Spesification of Packing ). Yang kemudian akan diproses pada bagian PPIC profile dan dilanjutkan ke bagian Accounting.
Tujuan Perancangan
Adapun tujuan dari perancangan yang dilakukan adalah sebagai berikut:
- Fungsional
- Membuat mekanisme pengontrolan kapal yang bekerja secara baik serta mampu dihubungkan dan dikendalikan dengan web browser yang ada pada android.
- Membuat prototype kapal yang dapat memantau sumbatan pada aliran air.
- Operasional
- Membantu mengetahui masalah yang ada di lingkungan masyarakat khususnya di bidang industri.
- Merancang sistem kontrol pada web browser smartphone android untuk mengendalikan pergerakan kapal.
Analisa Sistem
Metode Analisa Sistem
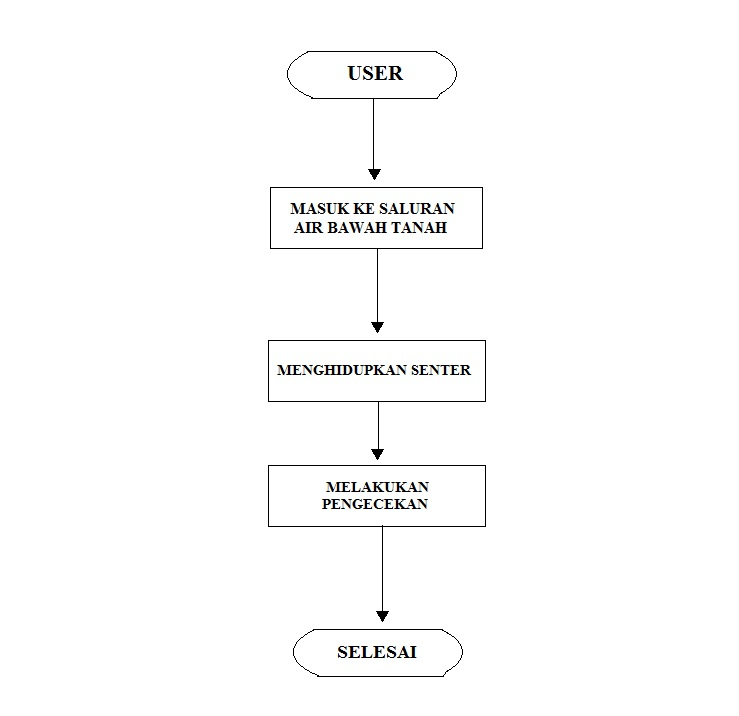
Gambar 3.3. Flowchart Sistem yang Berjalan
Untuk menganalisa sistem yang berjalan, pada penelitian ini digunakan teknik pembacaan melalui Flowchart diagram untuk mempermudah pembacaan sistem yang berjalan. Berdasarkan flowchart pada gambar 3.3, pada saat masuk ke saluran air bawah tanah masih manual, dengan menggunakan tenaga manusia sehingga menguras tenaga dan mempunyai resiko terjadi kecelakaan
Observasi ini dilakukan langsung di PT. YKK AP Indonesia yang beralamat di Jl. Manis Raya No.23 Desa Kadu, Tangerang-Banten 15810. Observasi dilakukan dengan melihat saluran air bawah tanah yang ada. Berdasarkan analisa, alat ini memiliki beberapa kelebihan dan kekurangan diantaranya sebagai berikut :
a) Kelebihan Alat
- Alat ini mampu menangkap gambar apa yang dilihatnya, lalu menampilkannya pada web browser sehingga dapat dilakukan pemantauan.
- Kapal ini dapat dikendalikan melalui semua perangkat yang mempunyai web browser sehingga memudahkan penggunanya dalam menggunakannya.
b) Kelemahan Alat
- Kapal ini tidak bisa digunakan saat keadaan saluran air bawah tanah dalam keadaan penuh dan tidak ada air.
- Kapal ini tidak bisa digunakan jika mengalami gangguan terhadap jaringan nya.
Diagram Blok
Dalam perancangan perangkat keras atau Hardware ini dibutuhkan beberapa komponen elektronika, perlengkapan mekanik dan device penunjang agar sistem dapat bekerja dan berjalan dengan baik sesuai dengan fungsinya. Agar mudah dipahami maka penulis membuat diagram blok dan alur kerjanya.
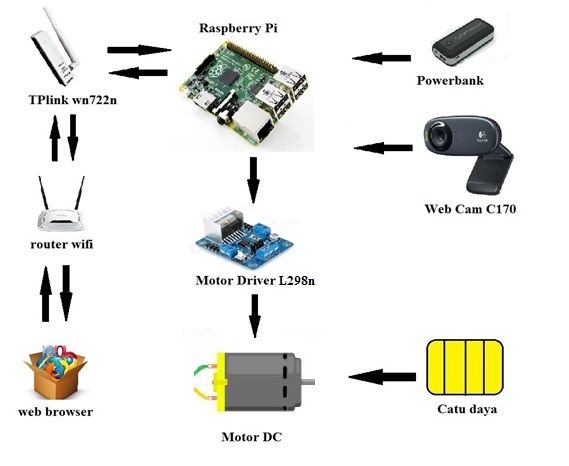
Gambar 3.4. Diagram Blok
Keterangan dan penjelasan Diagram Blok diatas adalah sebgai berikut :
- Web browser Smartphone android merupakan perangkat yang digunakan untuk menjalankan dan mengendalikan alat.
- TP Link WN722N merupakan perangkat yang dapat menerima dan mengirim sinyal untuk komunikasi antara smartphone android dengan mikrokontroler.
- Raspberry Pi B+ sebagai platform untuk memasukkan program ke dalam mikroSD yang merupakan pusat pengontrolan alat yang terdapat program didalamnya.
- MikroSD sebagai tempat menyimpan program yang dibuat, mikro SD ini diletakkan didalam Raspberry Pi.
- Power Bank merupakan catu daya untuk memberikan tegangan.
- Motor DC merupakan alat penggerak yang bergerak sesuai perintah mikrokontroler.
Cara Kerja Alat
Alat ini dibuat untuk dikendalikan secara remote darimana pun pengguna berada. Berikut adalah cara kerja alat ini berdasarkan Input, Proses, dan Output yang diinginkan :
- Input
- Proses
- Output
Pengguna menjalankan browser internet bisa dalam aplikasi Google chrome, FireFox, Safari, dan opera mini yang sudah terinstall Java Plugin. Di halaman browser user membuka IP kapal yang sudah diatur sebelumnya. Lalu pengguna akan diminta untuk memasukkan id dan password. Saat pengguna telah berhasil login maka pengguna sudah siap untuk mengendalikan kapal.
Proses yang terjadi pada alat ini dibagi menjadi pengendalian dan tampilan kamera. Dalam proses pengendalian, pada saat salah satu tombol perintah ditekan, maka tombol tersebut akan mengaktifkan JavaScript yang berjalan pada halaman web. Kemudian javascript tersebut akan mengekseskusi program python pada webserver yang akan mengaktifkan salah satu GPIO pada Raspberry Pi. GPIO tersebut akan mengalirkan tegangan listrik ke modul L298n dan modul tersebut akan menggerakkan motor DC sesuai dengan perintah yang diberikan user. Sedangkan untuk tampilan kamera, Webcam yang telah terpasang akan mengambil gambar secara terus menerus yang kemudian akan ditampilkan pada halaman web. Setelah itu user tinggal melakukan pengontrolan dari web tersebut.
Dalam proses output, motor akan bergerak sesuai dengan perintah pada web interface kontrol. robot akan bergerak maju, mundur, kanan dan kiri. Masing-masing pin GPIO mempunyai tegangan keluar sebesar 3,3v. Tegangan tersebut cukup untuk mengaktifkan pin output pada motor driver. Pin-pin tersebutlah yang akan menggerakkan dua motor DC dan membuat alat bergerak. Sedangkan untuk kamera nya, data-data yang ditangkap oleh webcam adalah data gambar jpg. Data jpg ini dikirimkan ke halaman web. Kemudian membuat gambar-gambar tersebut menjadi sebuah output video.
Pembuatan Alat
Perancangan yang dimaksudkan pada sistem kontrol ini meliputi perancangan perangkat keras (hardware) dan perangkat lunak (software). Secara umum pada perancangan alat ini adalah seperti yang di tunjukkan pada diagram Blok pada gambar 3.4. Alat yang dirancang akan membentuk suatu perancangan sistem kontrol alat pemantau sumbatan air dengan menggunakan android. Perancangan sistem secara keseluruhan memerlukan beberapa alat dan bahan yang digunakan untuk memenuhi kebutuhan dalam pembuatan sistem, adapun deskripsi alat dan bahan sebagai berikut:
a) Alat yang digunakan meliputi :
- Personal Computer (PC) atau Laptop
- Kabel USB
- Router Wifi
- Solder
- Obeng
b) Sedangkan Bahan-bahan yang digunakan :
- Raspberry Pi B+
- TP link WN722N (Wireless)
- Motor DC
- Webcam Logitech C170
- Micro SD
- Motor Driver (L289n)
- Timah
- Kabel jumper
- Baut dan mur 3 mm
- Power Bank (catu daya)
- Battery Pack
- Botol minuman
- kawat
- Double tip
Perangkat Keras ( Hardware )
- Perancangan Fisik
- Rangkaian Keseluruhan
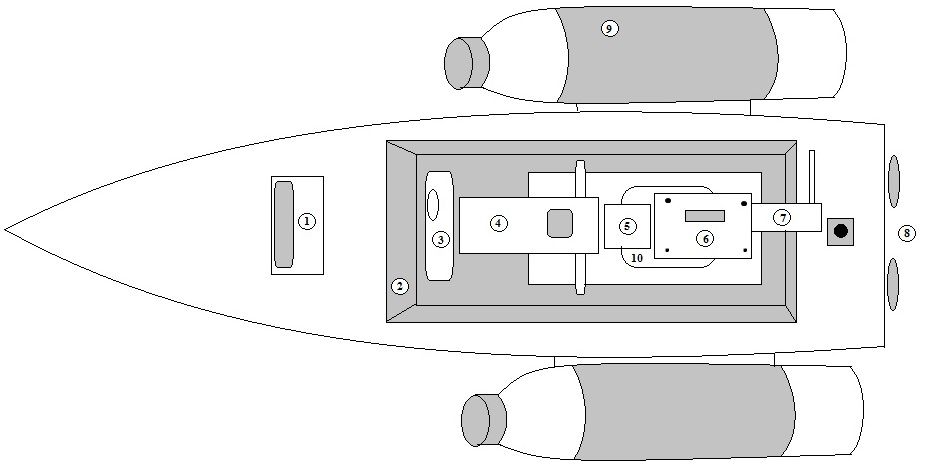
Gambar 3.5. Perancangan Fisik
Dalam perancangan ini dibutuhkan beberapa komponen elektronika dan device penunjang seperti Raspberry Pi B+, TP Link WN722N, Kamera Logitech T710, Power Bank, Kabel Data, Lampu LED, motor driver dan sebagainya, agar sistem dapat berjalan dengan baik sesuai dengan fungsinya. Agar lebih mudah dalam memahami rancangan gambar 3.5. diatas dan cara kerjanya, dibawah ini merupakan table 3.1. keterangan dan penjelasannya.
Tabel 3.1. Keterangan cara kerja masing-masing komponen
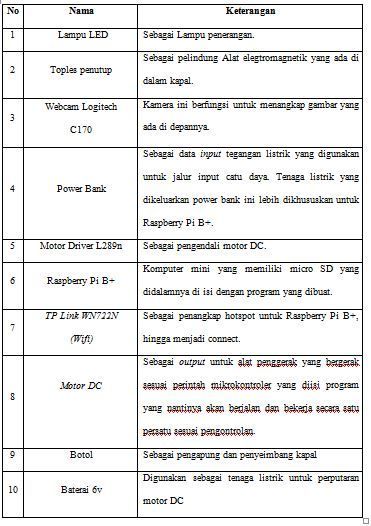
Pada alat pemantau sumbatan air ini raspberry pi merupakan tempat penyimpanan program dalam hal mengolah data dan pengoperasian sistem yang dibuat. Raspberry pi ini juga berfungsi sebagai otak dari seluruh sistem rancangan yang bisa disesuaikan dengan perintah yang akan dijalankan dan dikendalikan oleh User. Adapun deskripsi pemasangan bahan – bahan seperti kontrol lampu atau perangkat pada raspberry pi yang dibuat melalui aplikasi fritzing sehingga terbentuk suatu skematik rangkaian dapat dilihat dalam gambar 3.6, 3.7 dan 3.8 sebagai berikut :
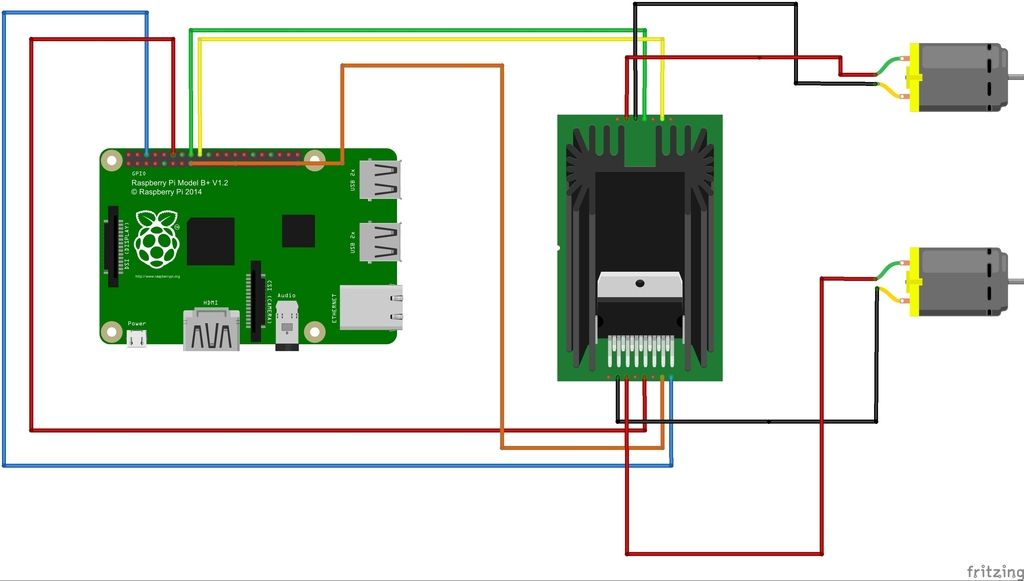
Gambar 3.6. Rangkaian Alat
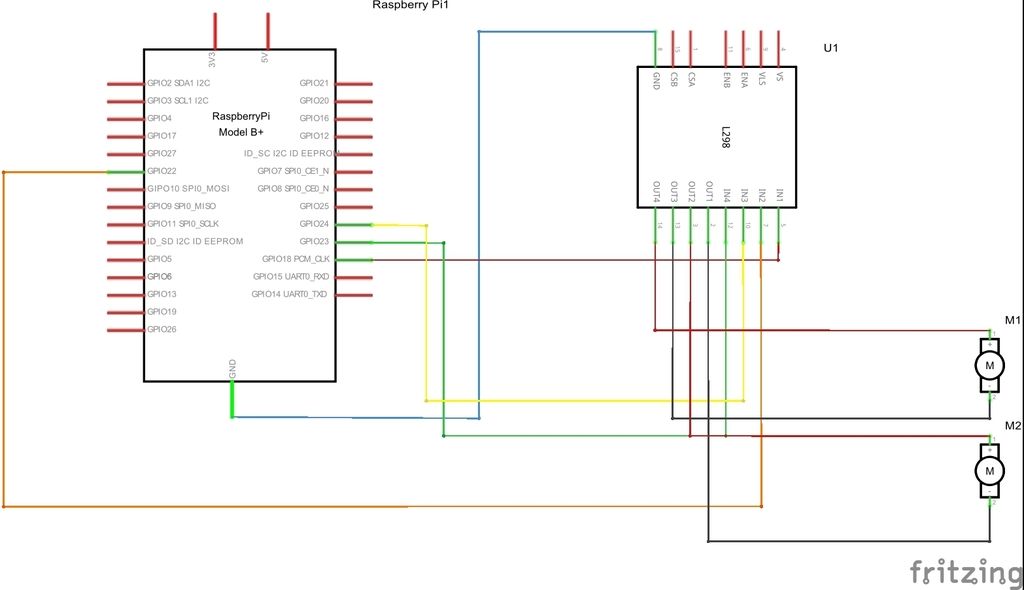
Gambar 3.7 Rangkaian Skematik Alat pemantau sumbatan air
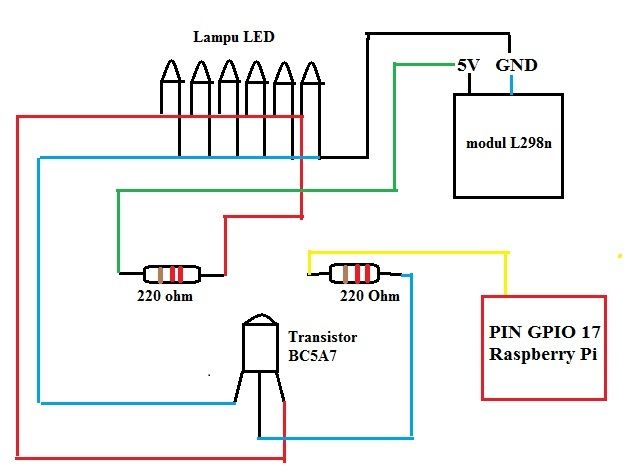
Gambar 3.8. Rangkaian Lampu Kapal
Perangkat Lunak ( Software )
- Instalasi Raspberry Pi
- Menginstal Raspbian menggunakan Win32 Disk Imager.
- Masukan SD Card kedalam Raspberry Pi.
- Setting Wifi Raspberry Pi menggunakan Ubuntu di PC/Laptop.
- Cari IP Address Raspberry Pi menggunakan Wireless Network Watcher.
- Klik Putty (SSH, Telnet Rlogin Client), Kemudian login dengan IP Address Raspberry Pi.
- Kemudian klik finist dan klik starx.
- Instalasi WebIOPi
- Instalasi Mjpg-streamer
- Software Pendukung
- Phyton : bahasa phyton disini berfungsi sebagai Web server dan GPIO kontrol yang mempunyai tugas untuk mengatur pergerakan alat
- Java : Java disini berguna untuk mengeksekusi perintah phyton yang ada pada halaman web.
- HTML : HTML berfungsi untuk menampilkan layout aplikasi yang dibuat sehingga menampilkan web interface pengendali alat.
- Belum adanya sebuah sistem yang praktis dan aman untuk digunakan.
- 2. Pengecekan yang dilakukan secara manual itu kurang aman dan cukup rumit sehingga menguras tenaga manusia.
- Membuat sistem yang dapat digunakan secara aman dan praktis.
- 2. Membuat sebuah kapal berkamera yang dapat digunakan dan dikendalikan melalui web browser.
- M= Mandatory
- D= Desirable
- I= Innesential
- T : Technical / Proses pembuatan
- O : Operasional / Manfaat
- E : Economic / Harga
- L : Low
- M : Middle
- H : High
- Jika rangkaian motor driver modul L289n diberikan catu daya dengan tegangan sebesar 6,5 maka motor driver telah siap digunakan sebagai pengendali motor DC.
- Memberikan tegangan sebesar 5 v pada raspberry pi untuk menghidupkannya.
- Alat akan bisa dikontrol jika raspberry pi dan smartphone android sudah terhubung ke dalam sebuah wireless yang sama.
- Masing-masing pin GPIO akan bekerja sesuai dengan instruksi yang diberikan pada halaman kontrol.
- Webcam akan menampilkan gambar sesuai dengan gerakan alat.
- Lampu LED pada kapal akan aktif bekerja apabila menerima perintah dari halaman kontrol.
- Maksimal jarak yang mampu ditempuh adalah 8 sampai 10 meter.
- Laptop atau PC
- Motor Driver L289n
- Motor DC
- Raspberry Pi b+
- Webcam logitech C170
- TP link WN722N
- Router wifi
- Kabel USB
- Catu Daya
- Software Idle Python
- Putty
- paint
- Snipping tool
- Fritzing
- Wnet watcher
- webIOPi
- Mengatur GPIO
- Membuat Fungsi GPIO
- Membuat fungsi macro
- Inisialisasi GPIO
- Konfigurasi Web server
- Looping Program
- Menghentikan Program
- Kepala Judul Halaman
- Tombol Fungsi Javascript
- Memanggil macro dari python
- Bentuk Ukuran Tombol
- Memanggil MJPG Streamer
- Menampilkan Background
- Mengumpulkan Data
- Perancangan Sistem
- Pengujian Sistem
- Perbaikan Sistem
- Training User
- Implementasi Sistem
- Dokumentasi Sistem
- Kebutuhan Web interface
- Kebutuhan alat
- Memiliki fitur koneksi ke internet
- Memiliki browser seperti google chrome, modzilla, opera mini, atau program browser lainnya.
- Alat pemantau sumbatan air bawah tanah ini dapat dikontrol melalui jaringan lokal dengan memanfaatkan protokol TCP/IP. Alat ini terlebih dahulu dikoneksikan ke jaringan wifi lokal dan siap untuk dikontrol oleh web browser yang terkoneksi pada jaringan yang sama.
- Alat ini dibuat dengan bentuk seperti kapal dan memiliki webcam untuk memantau keadaan saluran air bawah tanah secara realtime serta memaanfaatkan raspberry pi untuk perancangan dan pengembangan prototype.
- Dengan pembuatan kontrol berbasis web, alat ini dapat dikendalikan melalui semua perangkat yang mempunyai web browser sehingga memudahkan penggunanya dalam mengoperasikannya.
- Alat ini dapat ditambahkan sensor untuk mengukur seberapa jauh jarak saluran air bawah tanah.
- Pengendalian alat ini bisa dilakukan secara online dengan menambahkan modem gsm atau cdma pada alat tersebut sehingga dapat digunakan dari jarak yang sangat jauh.
- Penambahan motor servo pada bagian kamera sehingga dapat berputar dan lebih luas dalam menampilkan visualisasi.
- Penambahan robot tangan yang dapat membuat kapal ini bisa memindahkan suatu objek dari satu titik ke titik lainnya.
- Mendapat banyak wawasan dan ilmu pengetahuan yang tidak didapat dalam perkuliahan.
- Menambah ilmu sosial terhadap masyarakat, dan instansi terkait.
- Belajar bagaimana menanggapi permasalahan dilingkungan masyarakat khususnya dibidang teknologi.
- ↑ 1,0 1,1 1,2 Taufiq , Rohmat. 2013. Sistem Informasi Manajemen.Yogyakarta: Graha Ilmu.
- ↑ Sutarman. 2012. Buku Pengantar Teknologi Informasi. Jakarta: Bumi Aksara.
- ↑ Hartono,Bambang.2013. Sistem Informasi Manajemen Berbasis Komputer. Jakarta: PT . Rineka Cipta
- ↑ 4,0 4,1 Sutabri, Tata. 2012. Konsep Sistem Informasi.Yogyakarta: CV. Andi Offset.
- ↑ 5,0 5,1 5,2 5,3 5,4 Erinofiardi, Nurul Iman Supardi, Redi. 2012. Penggunaan PLC Dalam Pengontrolan Temperatur, Simulasi Pada Prototype Ruangan. Jurnal Mekanikal, Vol.3 No.2–Juli 2012
- ↑ Simarmata, Janner. 2010. “REKASA PERANGKAT LUNAK”. Yogyakarta: C.V ANDI OFFSET
- ↑ Wiyancoko, Dudy. 2010. “Desain Sepeda Indonesia”. Jakarta: PT Dumedia Desain.
- ↑ Sasankar dan Vinay Chavan. 2011. International Journal of Computer Science & Technology
- ↑ Rosa, A.S., dan M. Shalahuddin. 2013. Rekayasa Perangkat Lunak Terstruktur dan Berorientasi Objek. Bandung: Informatika.
- ↑ Henderi, Maimunah, dan Randy Andrian. 2011. Desain Aplikasi E-learning Sebagai Media Pembelajaran Artificial Informatics. Tangerang: Jurnal CCIT. Vol. 4, No.3-Mei 2011
- ↑ 11,0 11,1 Darmawan, Deni. 2013. Sistem Informasi Manajemen. Bandung: PT. Remaja Rosdakarya Offset
- ↑ 12,0 12,1 Al-Jufri, Hamid. 2011. Sistem Infromasi Manajemen Pendidikan. Jakarta: PT. Smart Grafika.
- ↑ Adelia dan Jimmy Setiawan. 2011. Implementasi Customer Relationship Management (CRM) pada Sistem Reservasi Hotel berbasisi Website dan Desktop”. Bandung. Jurnal Sistem Informasi, Vol. 6, No.2.
- ↑ 14,0 14,1 Sumardi. 2013. Mikrokontroler ATMega328.
- ↑ Dipranoto, Alfan Rachman 2010. PENGHITUNGAN JUMLAH KENDARAAN PADA AREA PARKIR DENGAN MIKROKONTROLLER AT89S51
- ↑ 16,0 16,1 16,2 16,3 Malik, Ibnu dan Mohammad Unggul Juwana. 2009. ANEKA PROYEK Mikrokontroler PIC16F84/A. Jakarta: PT Elex Media Komputindo.
- ↑ Chandra dan Deni. 2011. Jago Elektronika Rangkaian Sistem Otomatis. Jakarta: PT Kawan Pustaka.
- ↑ 18,00 18,01 18,02 18,03 18,04 18,05 18,06 18,07 18,08 18,09 18,10 18,11 Rusmadi, Dedy. 2009. Mengenal Komponen Elektronika. Bandung: Pionir Jaya.
- ↑ 19,0 19,1 19,2 Bird John. 2010. Electrical And Electronic Principles And Technology. Oxford: PT. Elsevier & Technology.
- ↑ Budiharto, Widodo. 2009.10 Proyek Robot Spektakuler. Jakarta: PT. Elex Media Komputindo.
- ↑ Kusuma, Isma Candra Jati dkk. 2011. Perancangan Simulator Pengendalian Posisi Turret Pada Mobil Pemadam Kebakaran. Universitas Diponegoro.
- ↑ Winarno dan Arifianto, Deni. 2011. “ Bikin Robot Itu Gampang”. Jakarta : PT Kawan Pustaka
- ↑ 23,0 23,1 23,2 G. Griddling and B. Weiss. Introdcuction to Microcontrollers. Vienna: University of Technology. 2007.
- ↑ 24,0 24,1 G. Griddling and B. Weiss. Introdcuction to Microcontrollers. Vienna: University of Technology. 2007
- ↑ Riadi, Imam. 2011. Optimalisasi Keamanan Jaringan Menggunakan Pemfilteran Aplikasi Berbasis Mikrotik. Universitas Ahmad Dahlan. Yoyakarta.
- ↑ Siahaan, Daniel. 2012. Analisa Kebutuhan dalam Rekayasa Perangkat Lunak. Yogyakarta: CV. Andi Offset
- ↑ 27,0 27,1 27,2 Guritno, Sudaryono dan Untung Rahardja. theory and application of IT Research. April 2010Guritno, Suryo, Sudaryono dan Untung Rahardja.2011. Theory and Application of IT Research Metodologi Penelitian Teknologi Informasi. Yogyakarta: CV. Andi Offset.
Raspbian adalah sistem operasi berbasis Debian (Linux) yang dapat digunakan pada Raspberry Pi. Raspbian tersebut merupakan seperangkat program dasar dan utilitas yang membuat Raspberry Pi berjalan. Dibutuhkan software Win32 Disk Imager untuk menginstal Raspbian yang berektensi .img. Win 32 Disk Imager merupakan sebuah aplikasi free yang memiliki antar muka, dan berfungsi sebagai writing image pada SD Card.Langkah – langkah dalam instalasi Raspbian adalah sebagi berikut :
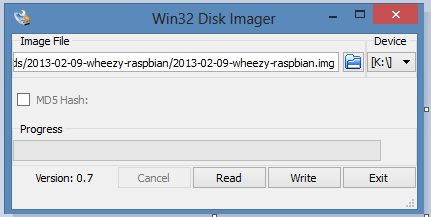
Gambar 3.9 Win 32 Disk manager

Gambar 3.10 Masukan SD card
Gambar 3.11 setting wifi
Gambar 3.12 Wireless network watcher
Gambar 3.13 Tampilan Putty Configuration
Gambar 3.14 Tampilan awal Raspberry Pi
WebIOPi adalah aplikasi open source yang dibuat untuk membuat mengontrol GPIO melalui web browser. Aplikasi ini dapat diunduh langsung melalui Raspberry Pi dengan perintah wget. Untuk dapat mengunduh WebIOPI, pastikan Raspberry Pi sudah terhubung dengan internet dan pada command line Raspberry Pi kita mengetikkan, $ wget http://webiopi.googlecode.com/files/WebIOPi-0.6.0.tar.gz

Gambar 3.15 Perintah Untuk mengunduh WebIOPi
Data yang diunduh adalah berupa data berformat .tar.gz yang merupakan kumpulan data yang harus di ekstrak. Untuk mengekstrak data tersebut digunakan perintah tar zxvf.

Gambar 3.16 Mengekstrak WebIOPi-0.6.0.tar.gz
Data yang sudah diekstrak adalah berupa data-data mentah untuk instalasi WebIOPi yang sudah berada dalam satu folder. Maka untuk selanjutnya kita masuk kedalam folder tersebut.

Gambar 3.17 Masuk ke Dalam Folder WebIOPi
Jika kita sudah masuk ke dalam folder maka aplikasi WebIOPi sudah siap untuk di instal dengan perintah “sudo ./setup.sh”

Gambar 3.18 Menginstal WebIOPi
Jika sudah selesai dengan benar maka kita bisa memeriksa apakah aplikasi ini sudah terinstall dengan benar perintah “ls –l”.jika aplikasi ini sudah terinstal dengan benar maka aplikasi ini pun siap digunakan.
Instalasi Mjpg-streamer tidak jauh berbeda dengan instalasi WebIOPi, yaitu dengan cara mengunduh langsung data yang diperlukan melalui internet.
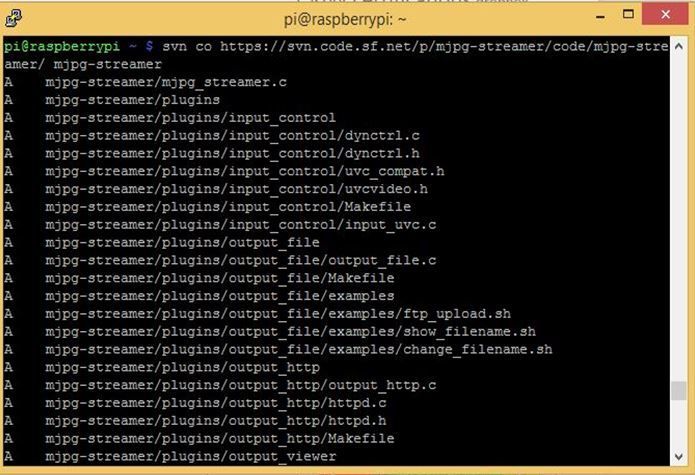
Gambar 3.19 mengunduh Instalasi mjpg streamer
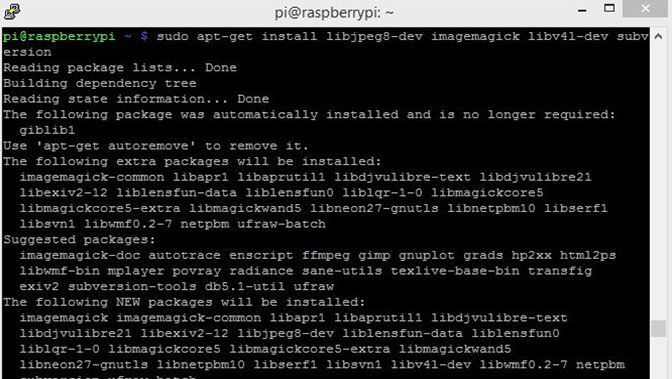
Gambar 3.20 Instalasi mjpg streamer
Jika sudah terinstal pastikan maka mjpg-streamer sudah siap dipakai dan dieksekusi. Untuk menjalankan aplikasi ini, pastikan USB webcam sudah terpasang di Raspberry Pi, setelah itu lakukan baris perintah sebagai berikut:

Gambar 3.21 Mengeksekusi Mjpg-Streamer
Untuk lebih memahaminya berikut ini adalah tabel keterangan dari baris perintah eksekusi Mjpg streamer
Tabel 3.2. Keterangan baris perintah Mjpg streamer
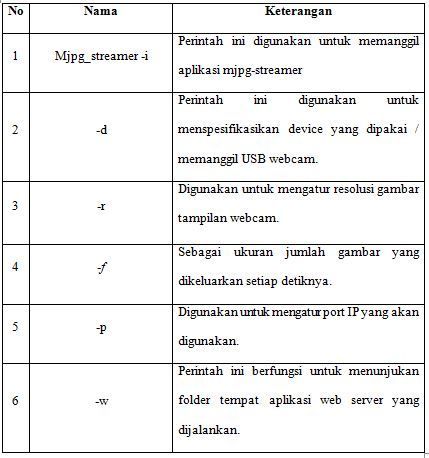
Dalam pebuatan alat ini diperlukan beberapa software pendukung yang digunakan untuk membuat web interface adalah gabungan dari tiga bahasa pemrograman yang disebut dengan WebIOPi. Bahasa-bahasa tersebut adalah Python, Java, dan HTML. Aplikasi ini digunakan karena mampu membuat web server dan mengendalikan GPIO secara langsung dalam satu data. Dan aplikasi ini juga bisa ber-interface dengan bahasa javascript yang merupakan bahasa pemrograman penting dalam pembuat aplikasi web. Untuk penjelasan lebih jelasnya sebagai berikut :
Perancangan Web Interface
Alat ini dikendalikan secara langsung melalui media nirkabel (tanpa kabel) dengan interface sebuah halaman web. Tampilan web ini dibuat secara sederhana agar mudah digunkan oleh pengguna nya. Berikut adalah gambar tampilan web interface alat ini.
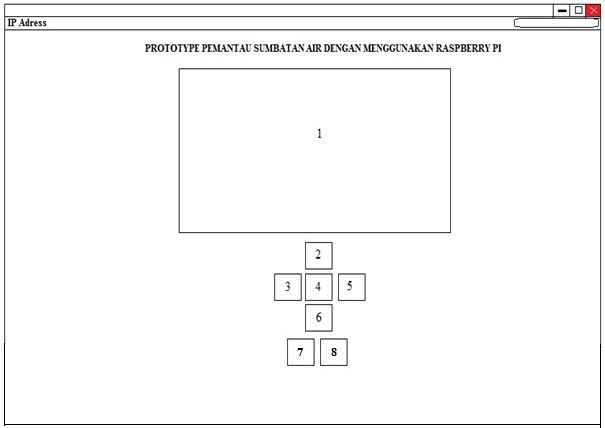
Gambar 3.22 Tampilan Web interface
Fungsi dari masing-masing kolom web interface dapat dijelaskan melalui tabel keterangan tampilan kontrol alat sebagai berikut :
Tabel 3.3. Keterangan Tampilan kontrol alat
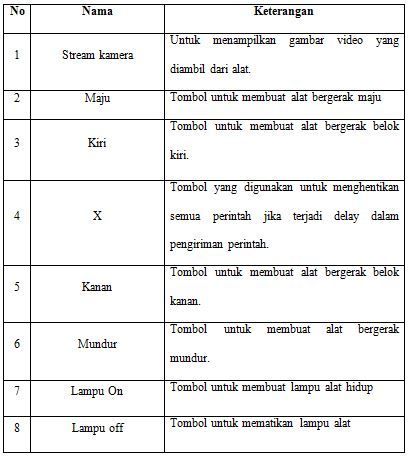
Flowchart sistem
Pada pembuatan sebuah sistem pengontrolan diperlukan sebuah gambar atau aluryang dapat menjelaskan langkah-langkah dari suatu system yang akan dibuat. Sehingga dapat memberikan penjelasan dalam bentuk gambar dibawah ini adalah gambaran diagram system flowchart.
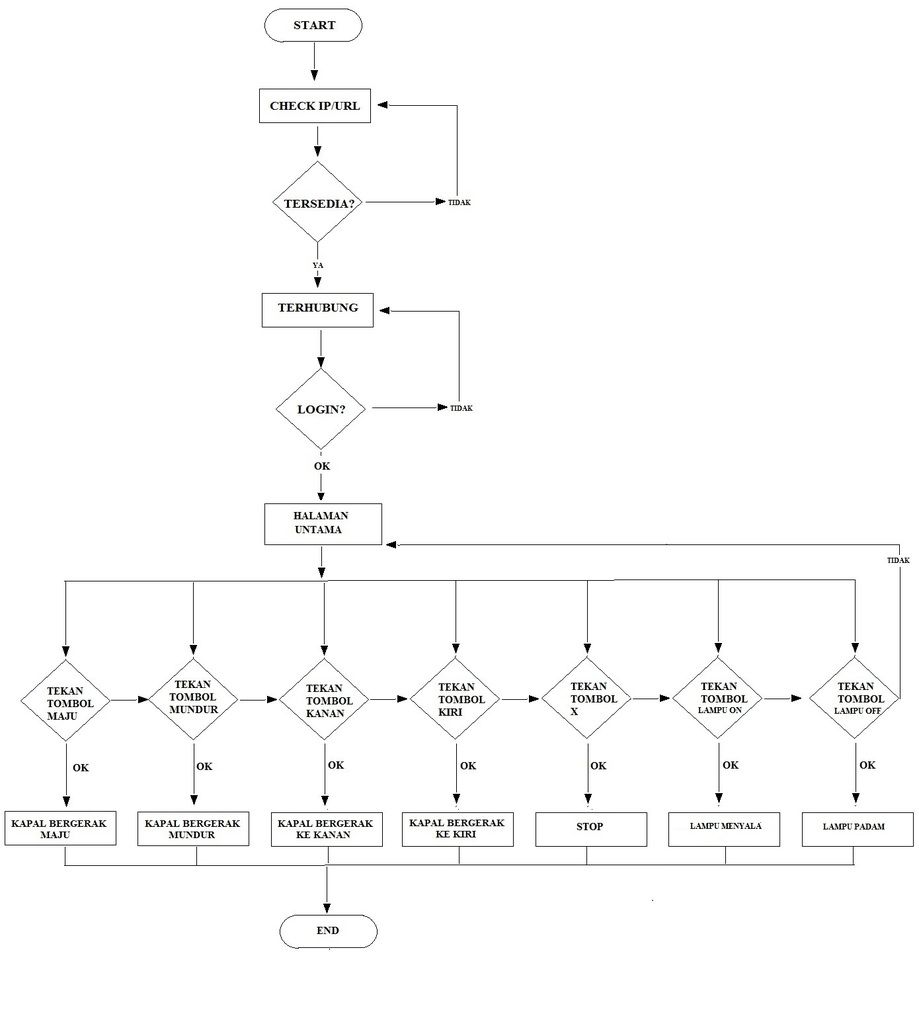
Gambar 3.23 Flowchart sistem
Permasalahan yang dihadapi dan Alternatif Pemecahan Masalah
Permasalahan yang dihadapi
Berdasarkan wawancara dan observasi yang dilakukan, user tidak dapat mengawasi ada atau tidaknya sumbatan pada gorong-gorong aliran air secara langsung dikarenakan untuk melakukan pengecekan manual itu sangat rumit dan kurang aman.
Setelah mengamati dan meneliti permasalahan yang ada dapat dirincikan sebagai berikut:
Alternatif Pemecahan Masalah
Setelah mengamati dan meneliti dari beberapa permasalahan yang ada, terdapat beberapa alternatif pemecahan dari permasalahan yang dihadapi, antara lain:
Proses pengendalian diawali dengan pembukaan URL atau IP address jika alamat tersebut bisa dibuka maka user akan dilanjutkan ke form login namun jika tidak dibuka user diminta untuk mengecek kembali koneksi jaringan komputer yang ada. Setelah berhasil login, tampilan halaman kontrol akan terbuka. Untuk lebih jelasnya bisa diperhatikan flowchart diagram sistem pada gambar 3.22 diatas.
User Requirement
Elisitasi Tahap I
Elisitasi tahap I disusun berdasarkan wawancara dengan stakeholder mengenai seluruh rancangan sistem alat yang akan dibuat. Berikut penulis lampirkan gambaran Elisitasi Tahap I:
Tabel 3.4 Elisitasi Tahap I
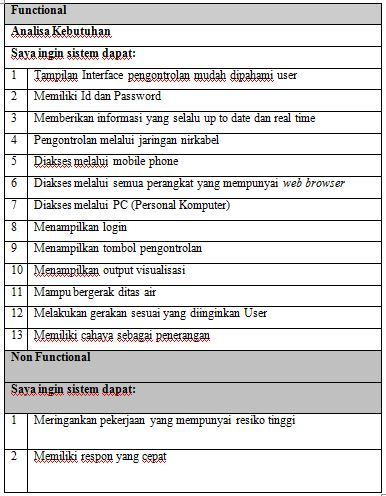
Elisitasi Tahap II
Elisitasi Tahap II dibentuk berdasarkan Elisitasi Tahap I yang kemudian diklasifikasikan lagi dengan menggunakan metode MDI.
Tabel 3.5 Elisitasi Tahap II
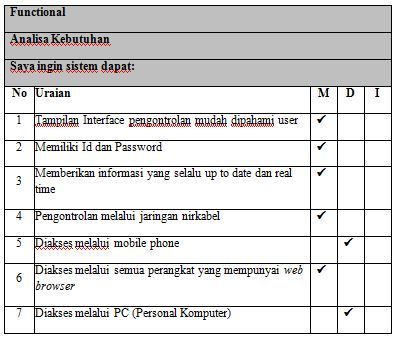
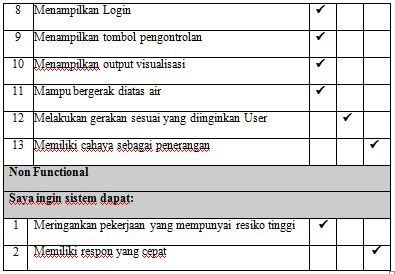
Keterangan :
Elisitasi Tahap III
Berdasarkan Elisitasi Tahap II di atas, dibentuklah Elisitasi Tahap III yang diklasifikasikan kembali dengan menggunakan metode TOE dengan opsi HML. Berikut tabel elisitasi tahap III tersebut:
Keterangan :
Tabel 3.6 Elisitasi Tahap III
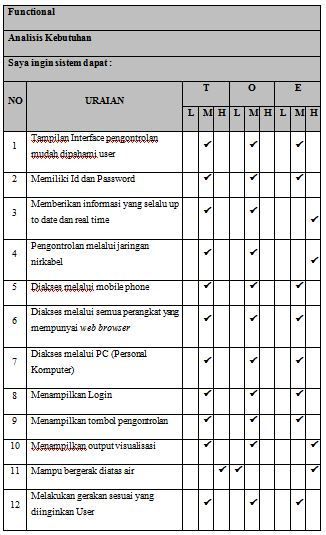
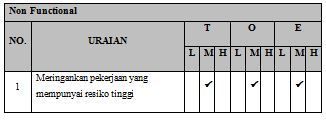
Final Elisitasi
Final elisitasi merupakan bentuk akhir dari tahap-tahap elisitasi yang dapat dijadikan acuan dan dasar pengembangan sistem kontrol prototype pemantau sumbatan aliran air bawah tanah. Berdasarkan elisitasi tahap III diatas, dihasilkanlah 13 fucntional dan 1 nonfucntional final elisitasi yang diharapkan dapat mempermudah dalam membuat suatu sistem pengontrolannya. Berikut tabel final elisitasi tersebut:
Tabel 3.7 Final Elisitasi
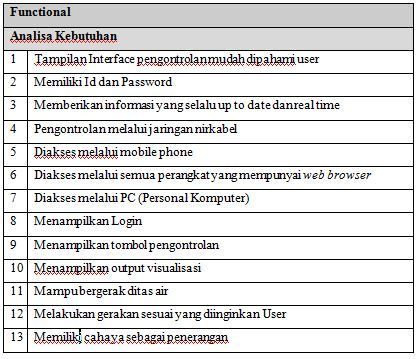
BAB IV
Prosedur Sistem
Sistem pengontrolan pemantau sumbatan air bawah tanah dengan simulasi prototype ini mampu memantau sumbatan air yang ada dengan jarak paling jauh 8 sampai 10 meter dengan pengontrolan menggunakan web browser yang ada pada smartphone android, ipad, PC dan laptop. Alat ini bekerja berdasarkan masukan atau input yang dikirim melalui pin GPIO yang ada pada raspberry pi B+ dengan jaringan wireless.
Perbedaan Prosedur Antara Sistem yang Berjalan dan Sistem Usulan
Adapun perbedaan prosedur antara sistem yang berjalan dan sistem yang akan diusulkan, bisa dilihat pada table 4.1. dibawah ini :
Tabel 4.1. Perbedaan Prosedur Sistem yang berjalan dan Sistem Usulan
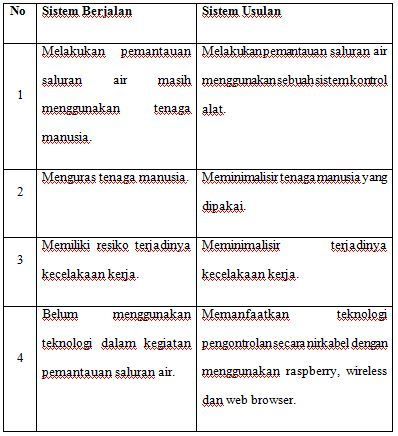
Konfigurasi Sistem Usulan
Spesifikasi hardware
Adapun spesifikasi hardware yang digunakan adalah sebagai berikut :
Aplikasi yang Digunakan
Adapun aplikasi yang digunakan adalah sebagai berikut :
Uji Coba
Setelah melakukan berbagai tahapan perancangan dan pemasangan komponen, selanjutnya adalah melakukan serangkaian uji coba pada masing masing blok rangkaian yang bertujuan untuk mendapatkan hasil yang sesuai. Tujuan dari pengujian ini adalah proses komunikasi data antara web interface dengan alat yang akan dikendalikan, melalui perangkat wifi sebagai media komunikasi.
Pengujian Motor driver
Pengujian modul pengendali motor L298n dilakukan dengan cara menghubungkan dua buah motor DC pada pin output yang ada di sebelah kiri dan kanan, dan 4 buah pin GPIO raspberry pi yang sudah diprogram sebagai inputnya. Berikut adalah tabel hasil pengujiannya :
Tabel 4.2. Arah Perputaran Motor DC
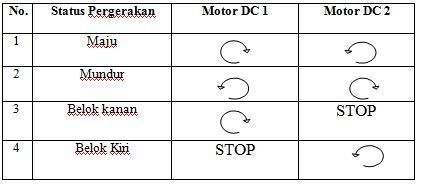
Pengujian Kendali melalui perangkat
Pengontrolan alat ini adalah sebuah aplikasi berbasis web. Pengontrolan ini dibuat agar nantinya dapat dijalankan dengan menggunakan perangkat apapun yang mempunyai web browser. Perangkat-perangkat tersebut seperti Handphone Android, Laptop/PC, dan iPad. Berikut ini merupakan hasil pengujian dari perangkat-perangkat tersebut.
Tabel 4.3 Pengujian Kontrol Melalui berbagai perangkat
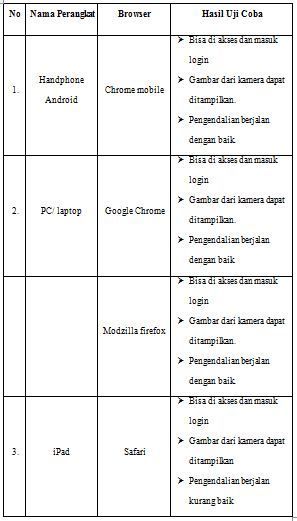
Berdasarkan tabel 4.3 pengontrolan alat yang dibuat bisa dibuka dengan berbagai perangkat dan web browser.
Pengujian Jarak Kendali Lokal
Untuk pengujian jarak kendali ini penulis menggunakan sebuah Mobile Wireless sebagai penghubung antara perangkat kontrol dengan alat. Pengujian yang dilakukan adalah dengan cara melihat langsung pergerakan alat ketika dijauhkan dari mobile wireless.
Berikut adalah hasil pengujian jarak berdasarkan perhitungan yang telah dilakukan oleh peneliti :
Tabel 4.4 Pengujian Jarak Jaringan Lokal
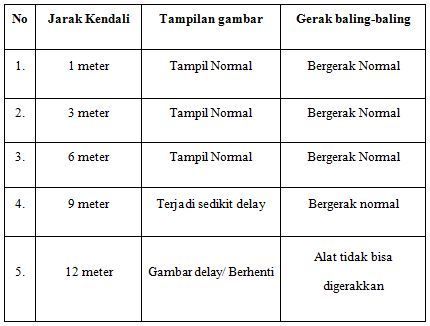
Dari tabel pengujian jarak kendali diatas dapat disimpulkan bahwa jika jarak alat lebih dari 12 meter maka alat tidak dapat berjalan dengan baik selain itu gerak gambar yang ditampilkan akan terlihat buram dan delay.
Pengujian Live streaming mjpg
Langkah ini adalah menguji apakah kamera sudah bisa diakses melalui jaringan local atau localhost. Cara mengujinya yaitu dengan mengetik IP address dari raspberry pi pada browser.
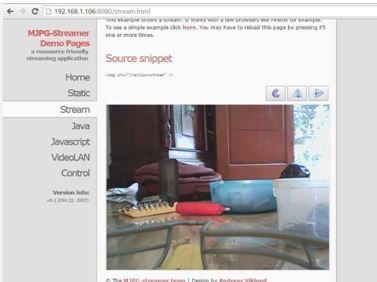
Gambar 4.1 Streaming mjpeg streamer
Gambar diatas terlihat bahwa raspberry pi sudah dapat menampilkan gambar dari kamera c170. Hal tersebut menunjukkan bahwa raspberry pi sudah dapat diakses dan sudah dapat melakukan live streaming menggunakan aplikasi mjpg streamer.
Pengujian Catu daya
Catu daya sebagai sumber tegangan pergerakan alat merupakan bagian yang sangat penting. Dalam merealisasi sistem alat ini dibutuhkan dua buah catu daya. Satu untuk Raspberry Pi dan satu lagi untuk pengendali motor DC. Hal ini perlu diperhatikan karena motor DC membutuhkan tegangan dan arus yang cukup besar untuk melakukan pergerakan. Raspberry Pi hanya membutuhkan tegangan sebesar 5v untuk dapat bekerja, sedangkan untuk pengendali motor membutuhkan minimal 6v dan bisa menerima tegangan sampai dengan 12v.
Pengujian Catu Daya untuk Raspberry Pi dilakukan dengan cara menggunakan multitester. Ujung multitester berwarna merah dihubungkan ke pada pin positif pada soket USB dan ujung multitester berwarna hitam dihubungkan ke pin negatif pada soket USB.
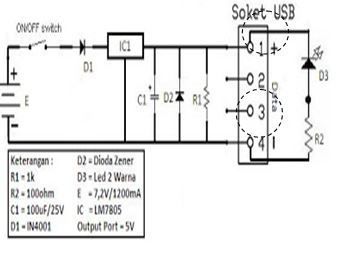
Gambar 4.2. Pengujian Catu Daya untuk Raspberry Pi
Setelah dilakukan pengujian sesuai gambar 4.2 didapatkan hasil tegangan yang keluar dari Catu Daya sebesar 5v dengan arus 1 Ampere. Hasil ini bisa dikatakan cukup untuk menghidupkan Raspberry Pi. Sedangkan untuk pengendali motor DC alat ini menggunakan sebuah baterai mobil remot kontrol. Untuk pengujiannya alat ini pernah menggunakan beberapa baterai. Berikut adalah tabel pengujian pemakaian baterai hingga daya baterai habis.
Tabel 4.5 Pengujian Catu Daya pengendali motor L298n
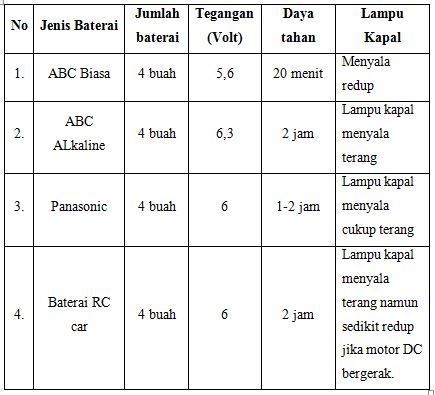
Dari hasil pengujian tabel 4.5 dapat disimpulkan bahwa 4 buah baterai ABC alkaline merupakan yang paling stabil namun akan lebih boros pengeluaran biaya karena daya baterai ABC alkaline ini tidak dapat diisi ulang. Sedangkan untuk 4 buah baterai RC car mampu memberi daya yang cukup besar dan stabil. Selain itu baterai ini pun dayanya dapat diisi kembali. Membuat pemakaian baterai ini lebih efisien dari segi biaya.
Pengujian Lampu Kapal
Lampu merupakan bagian yang cukup penting sebagai penerangan kapal ketika masuk kedalam saluran air bawah tanah. Dengan adanya penerangan dari lampu ini tentunya dapat memudahkan user untuk melihat gambar yang ditampilkan webcam sehingga terlihat lebih jelas jenis sumbatan yang ada. Berikut ini merupakan gambar hasil uji coba tampilan kamera webcam ketika menggunakan lampu sebagai penerangannya.
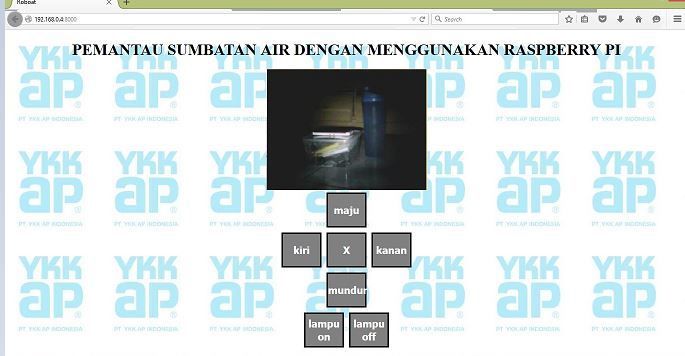
Gambar 4.3 Pengujian Lampu kapal
Analisa Program
Proses analisa ini dilakukan untuk mendapatkan kesesuaian antara perangkat keras yang sudah di uji coba dengan perangkat lunak yang telah diprogram ke dalam Raspberry Pi maupun aplikasi web yang di buat dengan WebIOPi.
Pembuatan aplikasi Web
Daftar program berikut adalah pengontrolan pada framework Raspberry Pi yang akan mengontrol jalannya alat seperti yang telah direncanaka pada BAB III.
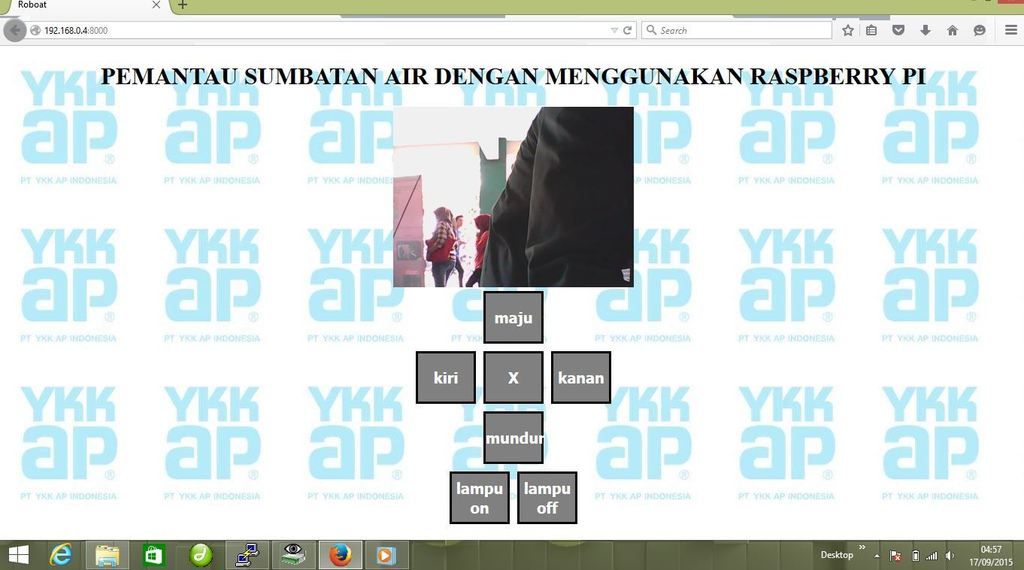
Gambar 4.4. Tampilan kontrol Pada Web Browser
Layer ini merupakan interface pengontrolan pada web browser. Untuk lebih jelasnya berikut ini adalah penjelasan listing program yang penting dalam pembuatan tampilan ini.
Dalam membuat aplikasi web ini penulis menggunakan library python webiopi yang dapat menjadi web server dan mengatur GPIO sesuai dengan keperluan.
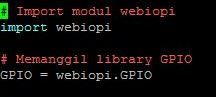
Gambar 4.5 Import Webiopi
GPIO yang akan digunakan untuk pengendalian sebanyak 5 pin, yaitu GPIO pin 17, 18, 22, 23, dan 24. Pin-pin tersebut diwakilkan dengan variabel-variabel agar lebih mudah untuk pemrogramannya.
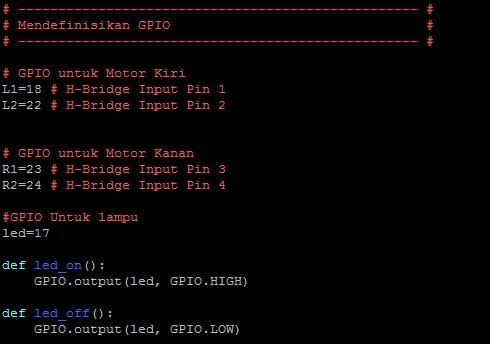
Gambar 4.6 Pin GPIO yang digunakan
Setelah variabel untuk pin dibuat, maka selanjutnya membuat fungsi-fungsi untuk variabel tersebut. Fungsi yang dibuat masing-masing untuk mengaktifkan motor dc mana yang akan aktif dan motor dc mana yang akan diam pada saat fungsi ini dipanggil.
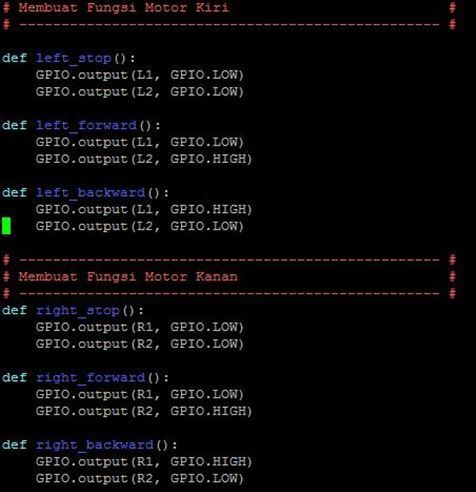
Gambar 4.7 Fungsi GPIO motor DC
Untuk membuat alat ini mampu bergerak sesuai dengan keinginan, maka dibuat fungsi baru yang menggabungkan fungsi-fungsi sebelumnya sudah dibuat. Fungsi baru ini lah yang akan membuat alat bergerak maju, mundur, belok kanan, belok kiri dan berhenti. Fungsi ini adalah go_forward, go_backward, turn_left, turn_right, dan stop. Dan fungsi-fungsi inilah yang nantinya akan ditambahkan ke Macro untuk Javascript.
Gambar 4.8 Definisi Macro untuk Java script
Pada bagian ini GPIO diatur sebagai output. Bagian ini perlu ditambahkan karena GPIO bisa diatur dengan berbagai fungsi dan fungsi awalnya bukan sebagai output.
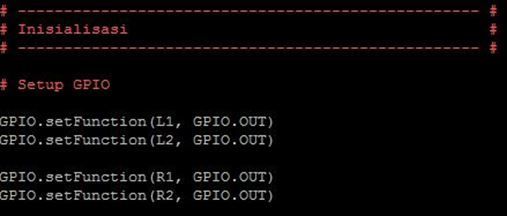
Gambar 4.9 Inisialisasi GPIO
Pada aplikasi webiopi sudah terinstall web server apache, dan disini web server tersebut bisa kita atur pada port berapapun yang kita inginkan dengan id dan password login yang juga bisa kita atur. Pada saat ini penulis mengatur aplikasi agar berjalan pada port 8000 dengan id: “syarif” dan password:”cambot”. Setelah server dikonfigurasi maka kita sudah dapat mendaftarkan fungsi macro mana saja yang kita ingin untuk dapat dipanggil pada Javascript di layout halaman web nantinya.
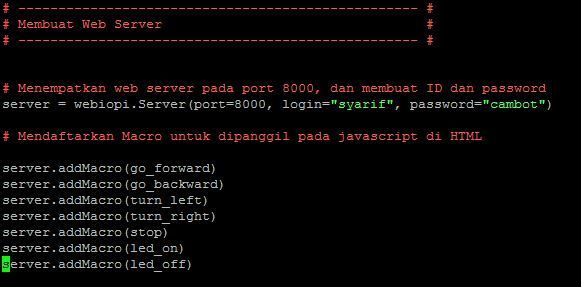
Gambar 4.10 setting id dan password
Baris kode ini berfungsi untuk menjalankan pengulangan program. Pengulangan program ini akan terus berjalan hingga kita menekan tombol keyboard CTRL+C. Atau jika mesin dimatikan secara paksa dan jaringan komputer dihentikan.
Gambar 4.11 Looping Program
Jika pengulangan program sudah berhenti, maka GPIO harus difungsikan pada keadaan awalnya tanpa harus reboot raspbian. Hal ini diperlukan karena GPIO yang sudah dipakai tidak dapat dipanggil kembali jika sistem operasi raspbian masih berjalan
Gambar 4.12 Stop Program
Pembuatan Layout Halaman Web
Setelah listing program python dibuat, selanjutnya adalah pembuatan layout halaman web dengan menggunakan HTML. Pada data HTML ini akan ditambahkan JavaScript agar program python yang sudah dibuat bisa dieksekusi pada halaman web.
Bagian ini adalah tentang pembuatan kepala dan judul halaman
Gambar 4.13 Pembuatan kepala judul halaman
Javascript dibuat dengan cara memanggil library webiopi.js yang sudah ada pada framework webiopi. Setelah webiopi.js didapat, maka fungsi-fungsi untuk pembuatan tombol sudah dapat dijalankan. Pada halaman web kita akan menggunakan 5 buah tombol untuk pergerakan robot. Masing-masing tombol akan memanggil fungsi macro yang sebelumnya sudah dibuat pada listing kode python. Dan memposisikan tombol-tombol tersebut sesuai dengan perancangan layoot halaman yang sudah dibuat pada BAB III.
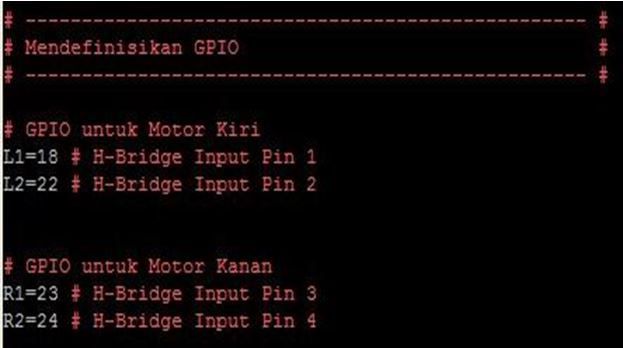
Gambar 4.14 tombol fungsi javascript
Pada bagian ini kita membuat fungsi javascript untuk memanggil fungsi-fungsi macro pada listing kode python serta membuat fungsi-fungsi itu siap untuk di eksekusi secara realtime.
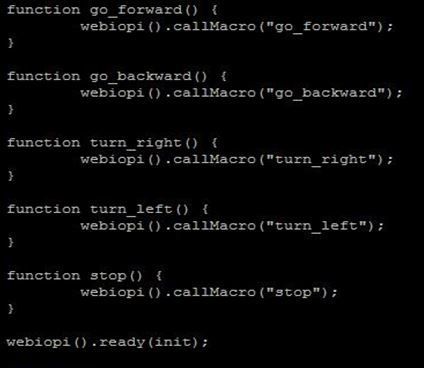
Gambar 4.15 memanggil macro dari python
Bentuk tombol yang dibuat adalah berupa persegi, dengan ukuran lebar 80 pixel dan tinggil 70 pixel. Pengaturan ukuran ini dibuat agar halaman web ini tidak terlalu besar untuk dibuka ada browser Handphone nantinya.
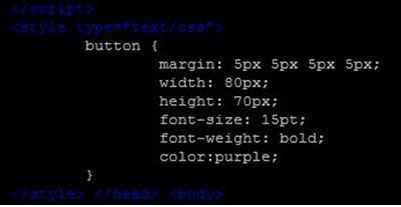
Gambar 4.16 mengatur ukuran tombol
Disini kita memanggil aplikasi MJPG-Streamer yang sudah berjalan sebagai visualisasi. Ukuran yang diatur juga dibuat agar visualisasi ini tidak terlalu besar untuk browser pada Handphone.

Gambar 4.17 memanggil mjpeg streamer
Untuk menampilkan background kita perlu mendownload gambar yang kita inginkan agar tersimpan didalam raspberry pi. Untuk lebih jelasnya perhatikan gambar berikut :
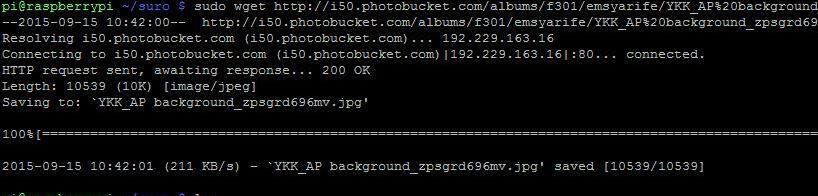
Gambar 4.18 menyimpan gambar ke dalam Raspberry Pi
dari gambar diatas menjelaskan bahwa untuk menyimpan gambar ke dalam Raspberry Pi diperlukan perintah “sudo wiget” selanjutnya diikuti link gambar yang user inginkan dan tekan enter hingga prosesnya selesai. Setelah gambar tersimpan ke dalam raspberry pi diperlukan sebuah perintah untuk emanggil gambar yang tersimpan tadi kedalam web interface. Berikut ini adalah script yang digunakan untuk menampilkan background.

Gambar 4.19 perintah untuk menampilkan background
Menjalankan Aplikasi pada jaringan Lokal
Setelah konfigurasi dan pembuatan aplikasi web berbasis python selesai. Maka langkah selanjutnya adalah mengaktifkan aplikasi web tersebut agar bisa diakses melalui web browser dengan perintah sebagai berikut:
Setelah perintah tersebut tereksekusi maka user/client hanya tinggal membuka web browser dan memasukkan IP dari raspberry pi dan port IP yang digunakan untuk aplikasi tersebut.
Rancangan Prototype
Prototype robot dibuat berdasarkan gambar rancangan yang ada pada BAB 3. Alat ini dapat bergerak maju, mundur, belok kiri dan kanan. Dengan menggunakan putaran motor DC kanan dan kiri nya.

Gambar 4.20 Tampak samping

Gambar 4.21 Tampak depan
Webcam untuk Kapal diposisikan diatas lampu agar tampilan gambar tidak terhalang oleh bagian lainnya selain itu memberikan gambar tampilan yang lebih jelas karena dibantu oleh penerangan lampu.
Implementasi
Schedule
Proses pengumpulan data dilakukan untuk mencari sumber dan mengetahui beberapa teori yang digunakan dalam pembuatan sistem dilakukan selama 4 minggu.
Dalam perancangan sistem ini terbagi menjadi dua, perancangan hardware dan software merupakan proses yang dilakukan agar dapat menghasilkan suatu rancangan yang mudah dipahami oleh user.
Pengujian sistem dilakukan untuk mengetahui kesalahan-kesalahan yang ada, dan untuk memastikan pemasangan hardware dan Software.
Penambahan atau pengurangan pada point-point tertentu yang tidak diperlukan, sehingga program benar-benar dapat dioptimalkan sesuai kebutuhan user.
Percobaan alat yang sudah di buat apakah benar-benar dapat berjalan atau tidak.
Setelah diketahui kelayakan dari program yang dibuat, maka akan dilakukan implementasi program.
Sistem yang dibuat didokumentasikan selama penelitian dan perancangan berlangsung.
Tabel 4.6. Tabel Rencana Implementasi Program
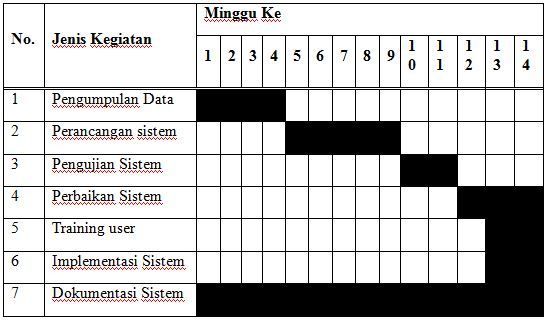
Implementasi Sistem
Berikut ini merupakan tabel hasil uji coba implementasi yang telah dilakukan di PT. YKK AP Indonesia.
Tabel 4.7 Tabel hasil uji coba Implementasi
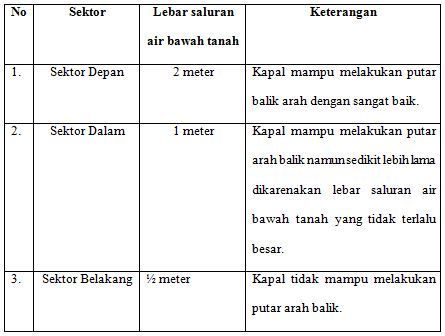
Setelah melakukan uji coba implementasi alat berikut ini merupakan kebutuhan web interface dan alat untuk sistem yang akan diimplementasikan adalah sebagai berikut :
Sebuah smartphone atau ipad atau PC atau laptop yang memiliki aplikasi google chrome/modzila.
Dalam perancangan sistem ini terbagi menjadi dua, perancangan hardware dan software merupakan proses yang dilakukan agar dapat menghasilkan suatu rancangan yang mudah dipahami oleh user.
Raspberry Pi : sebagai platform untuk memasukan program dan mengolah data serta merupakan otak dari alat ini.
Motor DC : 2 motor DC sebagai mesin untuk menggerakan alat / baling-baling.
TPlink WN722N : 1 buah untuk menerima sinyal wifi yang ada.
Webcam C170 : 1 buah untuk mengambil gambar secara realtime dengan bantuan raspberry pi.
Power Supply : Sebagai catu daya untuk memberikan tegangan pada alat.
Body RC kapal : Sebagai bentuk dasar alat.
Lampu LED : lampu LED sebagai penerangan kapal ketika berada disaluran air bawah tanah.
Motor Driver modul L289n : 1 buah sebagai perantara kendali antara raspberry dengan motor DC.
Untuk pengontrolannya, alat ini dapat diakses pengguna melalui berbagai perangkat seperti smartphone, komputer, laptop, Tablet Android, iPad dan sebagainya. Spesifikasi perangkat untuk pengguna yaitu :
Estimasi Biaya
Adapun estimasi biaya sistem keseluruhan yang dibuat dan yang dibutuhkan adalah sebagai berikut :
Tabel 4.7. Estimasi Biaya
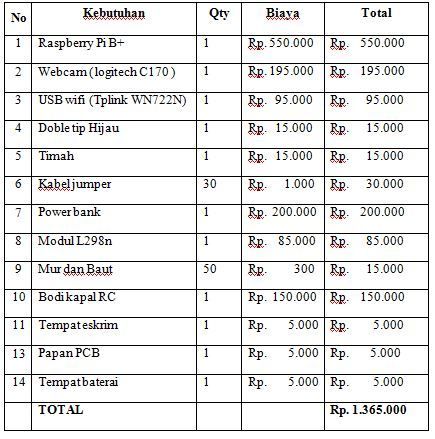
BAB V
Kesimpulan
Dari perancangan, pembuatan dan implementasi yang telah dilakukan dapat ditarik beberapa kesimpulan antara lain:
Saran
Berdasarkan perancangan dan kesimpulan yang dibuat, ada beberapa saran untuk pengembangan yaitu :
Kesan
Adapun kesan yang didapatkan setelah melakukan penelitian dan penulisan skripsi ini, diantaranya :
DAFTAR PUSTAKA