Pengguna:Meidy Surya
HOME SMART AUTOMATIC MENGGUNAKAN MEDIA
BLUETOOTH BERBASIS MIKROKONTROLLER
ATMEGA328
LAPORAN SKRIPSI

OLEH :
| 1031464703 | MEIDY SURYA HADI PUTRA |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
RAHARJA
(2014/2015)
LANDASAN TEORI
2.1. Teori Umum
2.1.1. Konsep Dasar sistem
1. Definisi sistem
Suatu sistem dapat terdiri dari beberapa subsistem atau bagian dari sistem-sistem. Komponen atau subsistem dalam suatu sistem tidak dapat berdiri sendiri, melainkan saling berinteraksi dan saling berhubungan membentuk satu kesatuan sehingga tujuan atau sasaran sistem tersebut dapat tercapai. Ada banyak definisi mengenai sistem diantaranya adalah:
Menurut Mustakini (2009:34), Sistem dapat didefinisikan dengan pendekatan prosedur dan pendekatan komponen, sistem dapat didefinisikan sebagai kumpulan dari prosedur-prosedur yang mempunyai tujuan tertentu.
Menurut Sutarman (2012:13), Sistem adalah kumpulan elemen yang saling berhubungan dan berinteraksi dalam satu kesatuan untuk menjalankan suatu proses pencapaian suatu tujuan utama.
Berdasarkan beberapa definisi diatas dapat disimpulkan bahwa sistem adalah suatu jaringan kerja dari prosedur-prosedur yang saling berhubungan, berkumpul bersama-sama untuk melakukan suatu kegiatan atau untuk menyelesaikan suatu sasaran/tujuan tertentu.
2. Klasifikasi Sistem
Menurut Mustakini (2009:54), Suatu sistem memiliki klasifikasi sebagai berikut:
a. Suatu sistem mempunyai komponen-komponen sistem (components) atau subsistem-subsistem.
Suatu sistem terdiri dari sejumlah komponen-komponen yang saling berinteraksi, yang artinya saling bekerja sama dalam membentuk suatu kesatuan. Komponen sistem tersebut dapat berupa suatu bentuk sub-sistem.
Batasan sistem membatasi antara sistem yang satu dengan yang lainnya atau sistem dengan lingkungan luarnya.
c. Suatu sistem mempunyai lingkungan luar (environment).
Lingkungan luar sistem adalah suatu bentuk apapun yang ada diluar ruang lingkup atau batasan sistem yang mempengaruhi operasi sistem tersebut.
d. Suatu sistem mempunyai penghubung (interface).
Penghubung sistem merupakan media yang menghubungkan sistem dengan sub-sistem yang lain, dengan demikian dapat terjadi suatu integrasi sistem yang membentuk suatu kesatuan.
e. Suatu sistem mempunyai tujuan (goal).
Suatu sistem pasti mempunyai tujuan (goals) atau sasaran sistem (objective). Sebuah sistem dikatakan berhasil apabila mengenai sasaran atau tujuannya, jika suatu sistem tidak mempunyai tujuan maka operasi sistem tidak akan ada gunanya.
3. Karakteristik Sistem
Menurut Mustakini (2009:53), bahwa suatu sistem mempunyai karakteristik. Karakteristik sistem adalah sebagai berikut:
a. Sistem abstrak (abstact system) dan sistem fisik (phisical system)
Sistem abstrak adalah sistem yang berupa pemikiran atau ide-ide yang tidak tempak secara fisik, misalnya sistem teknologi yaitu sistem yang berupa pemikiran-pemikiran hubungan antara manusia dengan Tuhan. Sitem fisik merupakan sistem yang ada secara fisik.
b. Sistem Alami (natural system) dan Sistem Buatan Manusia (human made system)
Sistem alami adalah sistem yang keberadaannya terjadi secara alami/natural tanpa campuran tangan manusia. Sedangkan sistem buatan manusia adalah sebagai hasil kerja manusia. Contoh sistem alamiah adalah sistem tata surya yang terdiri dari atas sekumpulan planet, gugus bintang dan lainnya. Contoh sistem abstrak dapat berupa sistem komponen yang ada sebagai hasil karya teknologi yang dikembangkan manusia.
c. Sistem pasti (deterministic system) dan sistem tidak tentu (probobalistic system)
Sistem tertentu adalah sistem yang tingkah lakunya dapat ditentukan/diperkirakan sebelumnya. Sedangkan sistem tidak tentu sistem tingkah lakunya tidak dapat ditentukan sebelumnya. Sistem aplikasi komputer merupakan contoh sistem yang tingkah lakunya dapat ditentukan sebelumnya. Program aplikasi yang dirancangdan dikembangkan oleh manusia dengan menggunakan prosedur yang jelas, terstruktur dan baku.
d. Sistem Tertutup (closed system) dan Sistem Terbuka (open system)
Sistem tertutup merupakan sistem yang tingkah lakunya tidak dipengaruhi oleh lingkungan luarnya. Sebaliknya, sistem terbuka mempunyai prilaku yang dipengaruhi oleh lingkungannya. Sistem aplikasi komputer merupakan sistem relative tertutup, karena tingkah laku sistem aplikasi komputer tidak dipengaruhi oleh kondisi yang terjadi diluar sistem.
2.1.2. Kriteria Sistem Yang Baik
Kriteria sistem yang baik antara lain:
a. Kegunaan
Sistem harus menghasilkan informasi yang tepat pada waktunya, relevan yang berarti sistem tersebut mempunyai manfaat bagi pemakainya.
b. Ekonomis
Dalam merancang atau membangun sebuah sistem sebisa mungkin hemat pada biaya perancangan, perawatan maupun operasional sistem tersebut.
c. Kehandalan
Keluaran (output) sistem harus memiliki tingkat ketelitian yang sangat tinggi
dan sistem itu sendiri harus mampu beroperasi secara efektif dan efisien.
d. Kapasitas
Sistem harus mempunyai kapasitas yang memadai untuk menangani periode-periode operasi puncak seperti pada saat sistem beroperasi pada puncak.
e. Fleksibilitas
Sistem harus cukup fleksibilitas untuk menampung perubahan yang akan muncul sewaktu-waktu.
2.1.3. Konsep Dasar Pengontrolan
1. Definisi Pengontrolan
Menurut Erinofiardi (2012:261), Suatu sistem kontrol otomatis dalam suatu proses kerja berfungsi mengendalikan proses tampa adanya campur tangan manusia (otomatis).
Kontrol otomatis mempenyai peran penting dalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmu pengetahuan dan teknologi, sistem kontrol otomatis telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengan cara yang lebih mudah, efisien dan efektif. Adanya kontrol otomatis secara tidak langsung dapat menggantikan peran manusia dalam meringankan segala aktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD) pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan, pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukan tenaga ahli perencanaan sistem pengendali dan perancangan desain sistem pengendali, termasuk teknisi profesional sebagai operator. berbagai system pengendalian yang menuntut kecepatan dan ketelitian yang tinggi dengan hasil output yang optimal.
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan Sistem Pengendali Loop Tertutup ( Closed-loop Control System ).
2. Jenis – Jenis Pengontrolan
a. Sistem Kontrol Loop Terbuka
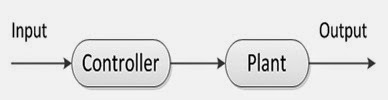
Gambar 2.1. Sistem pengendali loop terbuka
Sumber : Erinofiardi (2012:261)
Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
B. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012:261), sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.” Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.
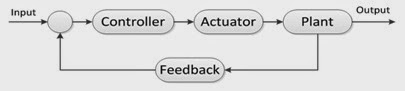
Sumber : Erinofiardi (2012:261)
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroller.
2.1.4. Konsep Dasar Metode Penelitian
Dalam sebuah penelitian terdapat beberapa konseep dasar metode diantaranya:
1. Perancangan
a. Flowchart
Menurut Sulindawati di dalam Jurnal SAINTIKOM (2010:8), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urutan-urutan prosedur dari suatu program”
Menurut Adelia dan Jimmy Setiawan (2011:116), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Dapat disimpulkan bahwa Flowchart adalah bentuk gambar atau diagram yang mempunyai aliran satu atau dua arah secara sekuensial.
2. Pengujian
a. White Box
Menurut Sodikin di dalam Jurnal Teknologi Informasi (2009:750), “Pengujian White Box berfokus pada strukutur kontrol pengguna”.
b. Black Box
Menurut Siddiq (2012:4), “Pengujian black box adalah pengujian aspek fundamental sistem tanpa memperhatikan struktur logika internal perangkat lunak”. Metode ini digunakan untuk mengetahui apakah perangkat lunak berfungsi dengan benar.
Menurut Budiman (2012:4), “Pengujian black box merupakan metode perancangan data uji yang didasarkan pada spesifikasi perangkat lunak. Data uji dibangkitkan, dieksekusi pada perangkat lunak dan kemudian keluaran dari perangkat lunak diuji apakah telah sesuai dengan yang diharapkan”.
3. Flowchart
Menurut Adelia di dalam Jurnal Sistem Informasi (2011:116), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Menurut Sulindawati Fathoni di dalam Jurnal SAINTIKOM (2010:8), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Flowchart biasanya mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan di evaluasi lebih lanjut. Bila seorang analisi dan programmer akan membuat flowchart, ada beberapa petunjuk yang harus diperhatikan,yaitu:
1. Flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
2. Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapat dimengerti oleh pembacanya.
3. Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas
4. Setiap langkah dari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.
5. Setiap langkah dari aktifitas harus berada pada urutan yang benar
6. Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
7. Gunakan simbol-simbol flowchart yang standart.
2.2. Teori Khusus
2.2.1. Konsep Dasar Mikrokontroller
1. Definisi Mikrokontroller
Menurut Malik (2009:1), bahwa Mikrokontroller adalah sebagai sebuah sistem komputer yang dibangun pada sebuah keping (chip) tunggal.
Mikrokontroller merupakan sebuah processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan computer mainframe, mikrokontroler dibangun dari elemen – elemen dasar yang sama. Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakan instruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer. Program ini menginstruksikan komputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.
2. Karakteristik Mikrokontroler
Menurut Malik (2009:2), karakteristik mikrokontroller mempunyai beberapa komponen-komponen yaitu:
a. CPU (Central Procesing Unit)
b. RAM (Read Only Memory)
c. I/O (Input/Output)
Adapun ketiga komponen tersebut secara bersama-sama membentuk sistem komputer dasar. Beberapa mikrokontroller memiliki tambahan komponen lain, misalnya ADC (Analog Digital Converter), Timer/Counter, dan lain-lain.
3. Klasifikasi Mikrokontroller
Menurut Malik (2009:3), mikrokontroller memiliki beberapa klasifikasi yaitu sebagai berikut:
a. ROM (Flash Memory) dengan kapasitas 1024 byte (1 KB)
b. RAM berkapasitas 68 byte
c. EEPROM (memori data) berkapasitas 64 byte
d. Total 13 jalur I/O (Port B 8 bit)
e. Timer/Counter 8 bit dengan prescaler
f. Fasilitas pemrograman di dalam sistem (ICSP = In Circuit Serial Programing)
Menurut Malik (2009:3), bahwa Beberapa fitur yang umumnya ada di dalam mikrokontroler adalah sebagai berikut:
a. RAM (Random Access Memory)
RAM digunakan oleh mikrokontroller untuk tempat penyimpanan variabel. Memori ini bersifat volatile yang berarti akan kehilangan semua datanya jika tidak mendapatkan catu daya.
b. ROM (Read Only Memory)
ROM seringkali disebut sebagai kode memori karena berfungsi untuk tempat penyimpanan program yang akan diberikan oleh user.
c. Register
Merupakan tempat penyimpanan nilai–nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroller.
d. Special Function Register
Merupakan register khusus yang berfungsi untuk mengatur jalannya mikrokontroller. Register ini terletak pada RAM.
e. Input dan Output Pin
Pin input adalah bagian yang berfungsi sebagai penerima signal dari luar, pin ini dapat dihubungkan ke berbagai media inputan seperti keypad, sensor, dan sebagainya. Pin output adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma mikrokontroller.
f. Interrupt
Interrupt bagian dari mikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program utama sedang berjalan, program utama tersebut dapat diinterupsi dan menjalankan program interupsi terlebih dahulu.
2.2.2. Mikrokontroller ATmega328
Menurut Syahid (2012:33), ATMega328 merupakan mikrokontroller keluarga AVR 8 bit. Beberapa tipe mikrokontroler yang sama dengan ATMega8 ini antara lain ATMega8535, ATMega16, ATMega32, ATMega328, yang membedakan antara mikrokontroller antara lain adalah, ukuran memori, banyaknya GPIO (pin input/output), peripherial (USART, timer, counter, dll).
Dari segi ukuran fisik, ATMega328 memiliki ukuran fisik lebih kecil dibandingkan dengan beberapa mikrokontroler diatas. Namun untuk segi memori dan periperial lainnya ATMega328 tidak kalah dengan yang lainnya karena ukuran memori dan periperialnya relatif sama dengan ATMega8535, ATMega32, hanya saja jumlah GPIO lebih sedikit dibandingkan mikrokontroler diatas.
Mikrokontroller ini memiliki beberapa fitur antara lain:
a. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
b. 32 x 8-bit register serba guna.
c. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
d. 32 KB flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
e. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
f. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
g. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
h. Master atau Slave SPI Serial interface.
Mikrokontroller ATMega328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan paralelisme. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock.32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU (Arithmatic Logic unit) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit ini disebut dengan register X (gabungan R26 dan R27), register Y (gabungan R28 dan R29), dan register Z (gabungan R30 dan R31).
Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register Control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Berikut ini adalah tampilan arsitektur ATmega 328:
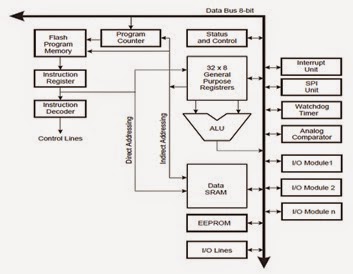
Gambar 2.3. Arsitektur ATMega328 (Sumber: Data sheet Microcontroller : 8) 1. Konfigurasi PIN ATMega328
(Sumber : jurnal Syahid tahun 2012 halaman 34)
Menurut Syahid (2012:34), ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input atau output digital atau difungsikan sebagai periperial lainnya.
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu PORTB juga dapat memiliki fungsi alternatif seperti di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial (ISP).
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital.
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
2.2.3. Konsep Dasar Komponen Elektronika
1. Definisi elektronika
Menurut Chandra (2011:9), “Komponen-komponen elektronika dibagi dalam jenis komponen pasif dan komponen aktif”.
Menurut Budiharto (2009:1), bahwa ”Elektronika adalah merupakan bidang yang menarik untuk dipelajari oleh pelajar dan hobbyist karena dapat berkreasi apa saja sesuai keinginan”.
Menurut Rusmadi (2009:10), komponen elektronika dibagi menjadi 2 kelompok yaitu:
a. Komponen Pasif
Menurut Rusmadi (2009:10), bahwa “Komponen pasif adalah komponen-komponen elektronika yang apabila dialiri aliran listrik tidak menghasilkan tenaga seperti: perubahan tegangan, pembalikan fasa, penguatan dan lain-lain”.
Menurut Rusmadi (2009:10), ada beberapa komponen yang termasuk dalam komponen pasif di antaranya adalah:
1. Resistor atau Tahanan
2. Kapasitor atau Kondensator
3. Trafo atau Transformato
b. Komponen aktif
Menurut Rusmadi (2009:33), bahwa Komponen aktif adalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatu tenaga baik berbentuk penguatan maupun mengatur aliran listrik yang melaluinya.
Menurut Rusmadi (2009:33), ada beberapa yang termasuk komponen aktif antara lain adalah:
1. Dioda
2. Transistor
3. IC (Intragated Circuit)
4. Thyristor atau SCR (Silicon Controller Recifier)
2.2.4. Konsep Dasar Resistor
1. Definisi Resistor atau Tahanan
Menurut Budiharto (2009:1), Salah satu komponen elektronika yang berfungsi untuk memberikan hambatan terhadap aliran arus listrik.
Dari pengertian diatas dapat disimpulkan bahwa resistor adalah komponen elektronika yang berfungsi memberikan tahanan atau hambatan arus listrik.
Resistor digunakan sebagai bagian dari jejaring elektronik dan sirkuit elektronik, dan merupakan salah satu komponen yang paling sering digunakan.



2.2.5. Konsep Dasar Kapasitor atau Kondensator
1. Definisi Kapasitor atau Kondensator
Menurut John (2010:61), “Kapasitor adalah komponen elektronika yang dapat digunakan untuk menyimpan muatan listrik”.
Menurut Rusmadi (2009:20), bahwa “Kapasitor adalah Komponen elektronika yang mampu menyimpan arus dan tegangan listrik sementara waktu”. Seperti juga halnya resistor, kapasitor adalah termasuk salah satu komponen pasif yang banyak digunakan dalam membuat rangkaian elektronika.
Kapasitor sendiiri berasal dari kata capacitance atau kapasitas yang artinya adalah kemampuan untuk menyimpan arus listrik (Dalam istilah elektronika diistilahkan sebagai “Muatan Listrik.”) Jadi kapasitor adalah suatu komponen yang dapat diisi dengan muatan listrik kemudian disimpan untuk sementara waktu dan selanjutnya muatan tersebut di kosongakan/dibuang melalui suatu sistem atau dihubungkan ke bumi. Kondensator diidentikkan mempunyai dua kaki dan dua kutub yaitu positif dan negatif serta memiliki cairan elektrolit dan biasanya berbentuk tabung.
Sumber: Rusmadi (2009:20)
Sedangkan jenis yang satunya lagi kebanyakan nilai kapasitasnya lebih rendah, tidak mempunyai kutub positif atau negatif pada kakinya, kebanyakan berbentuk bulat pipih berwarna coklat, merah, hijau dan lainnya seperti tablet atau kancing baju.

Sumber: Rusmadi (2009:20)
Namun kebiasaan dan kondisi serta artikulasi bahasa setiap negara tergantung pada masyarakat yang lebih sering menyebutkannya. Kini kebiasaan orang tersebut hanya menyebutkan salah satu nama yang paling dominan digunakan atau lebih sering didengar. Pada masa kini, kondensator sering disebut kapasitor (capacitor) ataupun sebaliknya yang pada ilmu elektronika disingkat dengan huruf (C).
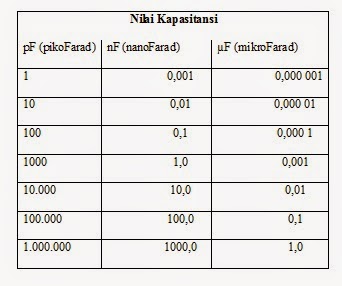
1. Kapasitansi
Satuan dari kapasitansi kondensator adalah (F). Namun Farad adalah satuan yang terlalu besar, sehingga digunakan:
a. Pikofarad ( ) =
b. Nanofarad ( ) =
c. Microfarad ( ) =
Satuan Farad adalah satuan yang sangat besar dan jarang dipergunakan dalam percobaan. Dalam prakteknya biasanya dipergunakan satuan Farad dalam bentuk pecahan seperti berikut ini:
a. 1 Farad (F) = 1.000.000 µF (mikroFarad)
b. 1 mikroFarad (µF) = 1.000 nF (nanoFarad)
c. 1 nanoFarad (nF) = 1.000 pF (pikoFarad)
Sumber : Rusmadi (2009:21)
Ada jenis kapasitor lain seperti kapasitor elektrolit yang selain memiliki nilai kapasitas juga memiliki parameter-parametera lain seperti batas tegangan kerja. Batas tegangan kerja (Working Voltage) yaitu batas tegangan maksimum di mana kapasitas tersebut dapat dioperasikan dalam suatu rangaian. Parameter tersebut biasanya dicantumkan langsung pada badan kapasitor. Selain daripada itu untuk jenis-jenis kapasitor pada umumnya diberi tanda (+) dan (-). Tanda tersebut adalah menyatakan polaritas yang harus dihubungkan dengan catu daya. Dalam pemasanganannya harus diperhatikan baik-baik jangan sampai kedua tanda tersebut dipasang terbalik sebab apabiala sampai terbalik akan mengakibatkan kerusakan pada kapasitor tersebut dan bahkan akan merusak rangkaian yang akan dibuat.

2.2.6. Relay Relay

B. Bentuk Relay

2.6.2. Cara Kerja Relay
Relay dapat bekerja karena adanya medan magnet yang digunakan untuk menggerakkan saklar. Saat kumparan diberikan tegangan sebesar tegangan kerja relay maka akan timbul medan magnet pada kumparan karena adanya arus yang mengalir pada lilitan kawat. Kumparan yang bersifat sebagai elektromagnet ini kemudian akan menarik saklar dari kontak NC ke kontak NO. Jika tegangan pada kumparan dimatikan maka medan magnet pada kumparan akan hilang sehingga pegas akan menarik saklar ke kontak NC.
2.6.3. Jenis-jenis Relay
SPST Single Pole Single Throw. SPDT - Single Pole Double Throw. Terdiri dari 5 buah pin, yaitu: (2) koil, (1) common, (1)NC, (1) NO.DPST – Double Pole Single Throw. Setara dengan 2 buah saklar atau relay SPST. DPDT - Double Pole Double Throw. Setara dengan 2 buah saklar atau relay SPDT. QPDT - Quadruple Pole Double Throw. Sering disebut sebagai Quad Pole Double Throw, atau 4PDT. Setara dengan 4 buah saklar atau relay SPDT atau dua buah relay DPDT. Terdiri dari 14 pin(termasuk 2 buah untuk koil).
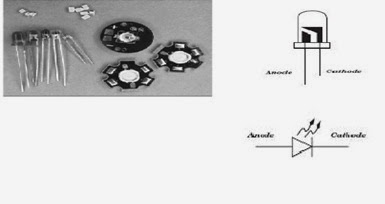
2.2.7. kristal
Berfungsi untuk menghasilkan sinyal dengan tingkat kestabilan frekuensi yang sangat tinggi. Kristal pada oscilator ini terbuat dari quartz atau Rochelle salt dengan kualitas yang baik. Material ini memiliki kemampuan mengubah energi listrik menjadi energi mekanik berupa getaran atau sebaliknya. Kemampuan ini lebih dikenal dengan piezoelectric effect.
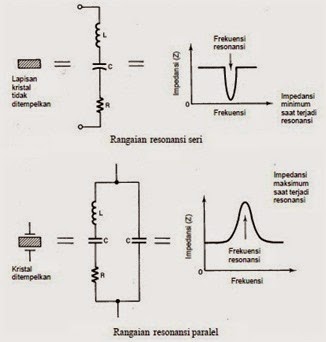
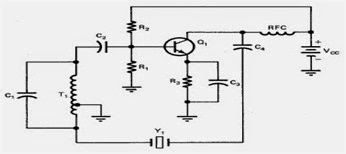
Kristal ini dapat dioperasikan pada rangkaian tangki dengan fungsi sebagai penghasil frekuensi resonansi paralel. Kristal sendiri dapat dioperasikan sebagai rangkaian tangki. Jika kristal diletakkan sebagai jaringan umpan balik, kristal akan merespon sebagai piranti penghasil resonansi seri. Kristal sebenarnya merespon sebagai tapis yang tajam. Kristal dapat difungsikan sebagai umpan balik pada suatu frekuensi tertentu saja. Oscilator hartley dan colpitts dapat dimodifikasi dengan memasang kristal ini. Stabilitas oscilator akan meningkat dengan pemasangan kristal. 2.2.8. Konsep Dasar LED (Light Emitting Diode) Menurut Widodo Budiharto (2008:2) “LED adalah komponen yang dapat mengeluarkan emisi cahaya. LED juga merupakan produk temuan lain setelah diode. Strukturnya sama dengan dengan diode”.