SI1031464690: Perbedaan revisi
| [revisi tidak terperiksa] | [revisi tidak terperiksa] |
| Baris 1.792: | Baris 1.792: | ||
<div style="font-size: 120%;font-family: 'times new roman';text-align: justify;text-indent: 0.5in"><p style="line-height: 2">Komponen elektronika dengan dua terminal, yangterbentuk dari dua jenis semikonduktor, yaitu type P yang biasa disebut dengananoda dan type N yang biasa disebut dengan katoda, dimana kemudian keduasemikonduktor ini digabungkan. Untuk membuat diode dalam keadaan conduct,diperlukan tegangan biasnya sebesar 0,3 volt untuk dioda dengan bahan germaniumatau 0,7 volt untuk dioda dengan bahan silikon.</p></div> | <div style="font-size: 120%;font-family: 'times new roman';text-align: justify;text-indent: 0.5in"><p style="line-height: 2">Komponen elektronika dengan dua terminal, yangterbentuk dari dua jenis semikonduktor, yaitu type P yang biasa disebut dengananoda dan type N yang biasa disebut dengan katoda, dimana kemudian keduasemikonduktor ini digabungkan. Untuk membuat diode dalam keadaan conduct,diperlukan tegangan biasnya sebesar 0,3 volt untuk dioda dengan bahan germaniumatau 0,7 volt untuk dioda dengan bahan silikon.</p></div> | ||
| + | |||
| + | [[Category:Skripsi 2013/2014]] | ||
Revisi per 22 Juli 2014 16.10
PERANCANGAN SISTEM KONTROL ROBOT
PEMINDAH BARANG MENGGUNAKAN APLIKASI
ANDROID BERBASIS ARDUINO UNO

Disusun Oleh :
NIM |
: 1031464690
|
Nama |
: Reza Amar Juliansah
|
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
(2014)
LEMBAR PENGESAHAN SKRIPSI
PERANCANGAN SISTEM KONTROL ROBOT PEMINDAH BARANG
MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO
Disusun Oleh :
NIM |
: 1033464701
|
Nama |
: Reza Amar Juliansah
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Computer System
|
Disahkan Oleh :
Tangerang, Juli 2014
| Ketua |
Kepala Jurusan
| ||||
| STMIK Raharja, |
Jurusan Sistem Komputer,
| ||||
| (Ir. Untung Rahardja, M.T.I) |
(Ferry Sudarto, S.Kom.,M.Pd)
| ||||
| NIP : 000594 |
NIP : 079010
|
LEMBAR PERSETUJUAN PEMBIMBING
PERANCANGAN SISTEM KONTROL ROBOT PEMINDAH BARANG
MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO
Dibuat Oleh :
Nim |
: 1031464690
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Disetujui Oleh :
Tangerang,.... 2014
| Pembimbing I |
Pembimbing II
| ||
| (Indrianto, MT) |
(Asep Saepulloh., S. Pd., M. Kom)
| ||
| NID : .... |
NID : ....
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PERANCANGAN SISTEM KONTROL ROBOT PEMINDAH BARANG
MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO
Dibuat Oleh :
NIM |
: 1031464690
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2014/2015
Disetujui Penguji :
Tangerang, .... 2014
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
PERANCANGAN SISTEM KONTROL ROBOT PEMINDAH BARANG
MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO
Disusun Oleh :
NIM |
: 1031464690
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Computer System
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
Tangerang, ..... 2014
| NIM : 1031464690
|
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Kata kunci : robot, motor servo, bluetooth, mikrokontroler, android.
ABSTRAKSI
With the development of mobile technology is not only used as a telephone and sms only, but also can be used as a device to control a robot, as well as Androidsmartphones are already embedded computer features. Robot technology so can becontrolled remotely and the desired user. Robot technology is also one that isable to assist the work of humans, such as the draining of human work, as wellas having a high risk. Robot function which was made to minimize the riskassociated with large heavy physical tasks, positioning an object, and to move goodsfrom one place to another. Therefore designed a robot movers using a servomotor output arm movement, microcontroller as the brain, Bluetooth as acommunication medium to send a data or input from the Android application thatacts as a device for controlling a robot remotely.
Keywords: robot, servo motor, bluetooth, microcontroller, android .
Bismillahirrahmanirrahim.
Puji syukur Penulis panjatkan kehadirat Allah SWT. karena rahmat dan karunia-Nya,Penulis masih diberikan umur panjang, kesehatan serta kekuatan dalam penyusunan Laporan Skripsi ini, sehingga bisa berjalanlancar dan dapat terselesaikan denganbaik. Tidak lupa shalawat beserta salam semoga senantiasa tercurahkan kepadajunjungan Nabi besar Muhammad SAW. Yang telah membawa kita dari jaman kegelapansampai jaman yang terang benderang ini.
Hanya dengan ridha-Nyalah penulis mampu menyelesaikan Laporan Skripsi yang berjudul “PERANCANGAN SISTEM KONTROL ROBOT PEMINDAH BARANG MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO”.
Pada kesempatan ini Penulis juga ingin mengucapkan banyak terima kasih dan penghargaan setinggi-tingginya kepada semua pihak yang telah membantu dalam menyelesaikan penulisan Laporan Skripsi ini, antara lain:
- Bapak Ir. Untung Rahardja, M.T.I., selaku Ketua STMIK Raharja,
- Bapak Sugeng Santoso, M.Kom, selaku Pembantu Ketua I STMIK Raharja.
- Bapak Ferry Sudarto S.Kom,M.Pd., selaku Kepala Jurusan Sistem Komputer yang telah memberikan banyak masukan dan motivasi kepada penulis sehingga SkripsI ini dapat terselesaikan dengan baik,
- Bapak Indrianto, M.T selaku Dosen Pembimbing I yang telah memberikan banyak membimbing dan mengarahkan sehingga Skripsi ini dapat terselesaikan dengan baik.
- Bapak Asep Saefullah,M.Kom selaku Dosen Pembimbing II yang telah memberikan banyak masukkan dan motivasi.
- Bapak H. Aryono dan Ibu Maemunah selaku kedua orang tua beserta keluarga yang telah mendukung dari segi materil maupun moril.
- Kepada Dhida, Handri, Dein, Haerul,Salim, M. Arif, Deni, Surya dkk. Selaku teman-teman yang sudah memberikan semangat.
- Semua pihak instansi terkait yang bekerjasama membantu dan memberikanmasukkan.
Penulis menyadari bahwa penyusunan Laporan ini masih banyak kekurangan. Oleh karena itu, Penulis sangat mengharapkan kritik dan saran yang membangun dari para pembaca sehingga Laporan ini menjadi lebih sempurna.Semoga karya tulis ini dapat memberikan informasi dan pengetahuan yang bermanfaat serta dapat menjadi inspirasi bagi para pembaca khususnya mahasiswa.
Akhir kata, Penulis sampaikan dengan harapan semoga Skripsi ini dapat berguna dan bermanfaat bagi semua pihak.
| Tangerang, ..... 2014 | |
| Reza Amar Juliansah | |
| NIM. 1031464690 |
Daftar isi
BAB I
PENDAHULUAN
Latar Belakang
Dalam perkembangan ilmu teknologi di bidang elektronika dan komunikasi sekarang ini, banyak manfaat yang bisa dirasakan oleh lapisan masyarakat, salah satunya untuk mempermudah segala macam pekerjaan di bidang industri, pendidikan, pemerintahan dan lain sebagainya. Seiring dengan naiknya kebutuhan masyarakat dan teknologi yang semakin canggih,dibuatlah suatu sistem kontrol robot yang mampu di kendalikan menggunakan smartphone yang berupa mini komputer untuk memindahkan suatu barang, bertujuan untuk mempermudah pekerjaan manusia,meringankan tugas-tugas berat yang mempunyai resiko tinggi contohnya tugas mengangkat barang dan memperkecil terjadi kecelakaan dalam hal mengangkat barang, serta mampu dikendalikan jarak jauh sesuai apa yang kita inginkan.
Menanggapi permasalahan yang ada di bidang industri serta memanfaatkan media seluler yang tidak hanya dipakai untuk sms dan telephone saja, tapi bisa digunakan untuk pengendalian sebuah robot jarak jauh seperti smartphone android. Dan sering melihat pekerjaan mengangkat barang yang sangat menguras tenaga manusia, sehingga dibuatlah fungsi robot untuk memperkecil terjadi kecelakaan yang berhubungan dengan tugas fisik yang menguras tenaga, memposisikan sebuah benda, dan memindahkan barang dari satu tempat ketempat lain. Pada umumnya robot merupakan alat mekanik yang bisa melakukan tugas fisik dan juga merupakan alat otomatis dimana sistemnya sudah tertanam didalam mikrokontroler dengan tugas yang sederhana. Namun dengan berkembangnya mini komputer seperti smartphone androidyang sudah ditanamkan fitur komputer yang mempunyai operating system tersendiri yang mampu dihubungkan dengan media jaringan nikabel, sehingga terfikir untuk menghubungkan antara robot dengan smartphone. Yang nantinya diharapkan bisa dikontrol melalui minikomputer atau smartphone tersebut, sehingga gerakan robot bisa di kendalikan dan disesuaikan dengan apa yang kita inginkan.Kemampuan smartphone android dapat digunakan sebagai salah satu media pengoperasian otomasi pada perangkat elektronik yang terhubung dengan jaringan nirkabel dan bisa dikontrol secara jarak jauh, kita dapat mengendalikan fungsi robot apapun yang kita inginkan.
Rumusan Masalah
Dalam rumusan masalah ini memuat uraian secara rinci dari permasalahan yang diidentifikasi pada latar belakang, adapun rumusan masalah dalam penyusunan penelitian ini sebagai berikut :
- Bagaimana merancang dan membangun robot yang mampu memindahkan barang berupa dus dari satu tempat ke tempat lain?
- Bagaimana mikrokontroler berkomunikasi dengan perangkat Smartphone Android melalui media Bluetooth?
-
Bagaimana membuat aplikasi Smartphone Android yang mampu mengendalikan fungsi robot?
Ruang Lingkup
Sebagai batasan masalah atas penelitian ini agar tetap fokus dan terarah, maka penulis memberikan ruang lingkup laporan sebagai berikut :
- Robot mampu memindahkan barang berupa dus dari satu tempat ke tempat lain.
- Robot dapat terkendali dan bergerak dengan memanfaatkan aplikasi smartphone android.
- Untuk pergerakan lengan robot menggunakan 5 buah motor servo dan mikrokontroler ATMega328(Arduino Uno) sebagai otaknya.
- Untuk komunikasi antara robot dengan Bluetooth dan smartphone menggunakan tipe Bluetooth “HC-06 BLUETOOTH MODUL SERIAL”.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Adapun tujuan dari penelitian yang dilakukan adalah sebagai berikut:
1. Tujuan Individual
- Mengimplementasikan dan menerapkan ilmu teknologi informasi dan komunikasi khususnya yang didapatkan selama kuliah.
- Persyaratan untuk kelulusan mata muliah skripsi.
2. Tujuan Fungsional
- Membuat mekanisme pengontrolan robot yang dapat bekerja secara baik yang mampu dihubungkan dan dikendalikan dengan aplikasi smartphone android.
- Membuat prototipe robot yang dapat memindahkan dan memposisikan suatu barang dari satu tempat ke tempat lain.
3. Tujuan Operasional
- Membantu menyelesaikan masalah yang ada di lingkungan masyarakat khususnya di bidang industri.
- Merancang sistem kontrol pada smartphone android untuk mengendalikan pergerakan robot.
Manfaat Penelitian
Sebuah karya yang baik adalah karya yang memiliki banyak manfaat. Adapun manfaat yang dihasilkan dari penelitian ini adalah :
1. Manfaat Individual
- Bentuk apresiasi dan kontribusi bagi pengembang teknologi aplikasi di bidang teknologi informasi dan komunikasi.
- Memaksimalkan dan meningkatkan inovasi dan kreatifitas dalam menciptakan sebuah karya yang mengimplementasikan ilmu teknologi informasi dan komunikasi.
2. Manfaat Fungsional
- Mampu membantu untuk menggantikan tugas manusia yang berhubungan dengan tugas fisik seperti mengangkat barang.
- Mampu meringakan proses pekerjaan di bidang industri.
3. Manfaat Operasional
- Diharapkan kebutuhan masyarakat di bidang industri dapat tercapai dan terpenuhi dengan baik.
- Diharapkan masyarakat tidak perlu lagi mengeluarkan tenaga yang berat dalam tugasnya di bidang industri.
Metode Penelitian
Dalam rangka menghasikan karya yang sesuai dengan teori ilmiah dan tepat, maka dalam penyusunan penelitian ini ada beberapa metode yang digunakan,antara lain :
Metode Pengumpulan Data
a. Observasi
Melakukan pengamatan dan pemahaman yang didapat dilapangan untuk mengetahui proses pengerjaan dan memperoleh data dan informasi tentang jenis bahan atau peralatan apa saja yang dibutuhkan, yang tentunya ekonomis dan terjangkau, namun yang sesuai dan tetap memenuhi kriteria.
b. Wawancara
Metode ini dilakukan melalui proses tanya jawab dengan narasumber-narasumber di tempat atau lokasi penelitian yang dilakukan.
c. Studi Pustaka
Metode untuk mendapatkan informasi dan teori-teori yang sesuai dengan sistem yang akan dibuat dengan mencatat, mempelajari dan memahami literature review yang berhubungan dengan penelitian dari berbagai sumber yang tertulis maupun elektronik. Yang digunakan penulis berupa buku-buku,jurnal dan browsing internet.
Metode Analisa
Metode ini melakukan analisa suatu sistem yang sudah ada, bagaimana sistem itu berjalan dan apakah kekurangan dari sistem tersebut. Pada sistem yang sekarang dalam penggunaannya masih manual, sehingga perlu adanya sistem yang dapat membantu pekerjaan di bidang industri.
Metode Perancangan
Dalam metode perancangan ini kita dapat mengetahui bagaimana sistem itu dibuat atau dirancang dan alat apa saja yang dibutuhkan. Melalui tahapan pembuatan flowchart dari sistem yang akan dibuat dan pembuatan desain aplikasi pengontrolan berupa perancangan perangkat lunak (Software) dan perangkat keras (Hardware).
Metode Pengujian
Pada metode pengujian ini yang dipakai adalah metode pengujian black box.
Sistematika Penulisan
Untuk mempermudah dalam hal penyusunan dan dapat dipahami lebih jelas, laporan ini dibagi atas beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub-sub yang akan membahas dan menguraikan masalah yang lebih terperinci. Dengan susunan sebagai berikut:
BAB I PENDAHULUAN
Pada bab ini berisi tentang latar belakang, rumusan masalah, ruang lingkup, tujuan dan manfaat, metode penelitian dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini berisi tentang teori dan literature review yang sesuai dan akurat sehingga bisa mendukung penelitian dalam penulisan sehingga menghasilkan karya tulis yang bernilai ilmiah.
BAB III ANALISA SISTEM DAN PERANCANGAN
Bab ini memuat analisa dan perancangan “SISTEM KONTROL ROBOT PEMINDAH BARANG MENGGUNAKAN APLIKASI ANDROID BERBASIS ARDUINO UNO” yang dijelaskan secara terperinci.
BAB IV RANCANGAN SISTEM YANG DIUSULKAN
Dalam bab ini membahas tentang sistem yang akan diusulkan seperti usulan prosedur sistem berjalan, flowchart sistem yang diusulkan, rancangan prototipe, konfigurasi sistem, pengujian, evaluasi, implementasi, dan estimasi biaya.
BAB V PENUTUP
Bab ini berisi tentang kesimpulan dan saran dari hasil karya sebagai upaya untuk perbaikan dan pengembangan kedepannya.
DAFTAR PUSTAKA
LAMPIRAN
BAB II
LANDASAN TEORI
Teori Umum
Konsep Dasar Sistem
1. Definisi Sistem
Sistem dapat terdiri dari beberapa bagian yang menjadi satu kesatuan tertentu dan dibagi beberapa subsistem atau sistem-sistem bagian. Elemen-elemen atau subsistem-subsistem dalam suatu sistem tidak dapat berdiri sendiri-sendiri, namun saling berinteraksi dan saling berhubungan membentuk satu kesatuan sehingga tujuan atau sasaran dapat tercapai.
Menurut Sutarman (2012:13), “Sistem adalah kumpulan elemen yang saling berhubungan dan berinteraksi dalam satu kesatuan untuk menjalankan suatu proses pencapaian suatu tujuan utama”.
Menurut Mulyanto (2009:2), “dalam bidang sistem informasi, sistem diartikan sebagai sekelompok komponen yang saling berhubungan, bekerja sama untuk mencapai tujuan bersama dengan menerima input serta menghasilkan input dalam proses transformasi yang teratur”.
Berdasarkan beberapa teori dan definisi sistem yang dikemukakan di atas dapat ditarik kesimpulan bahwa sistem adalah sekumpulan atau serangkaian dari komponen-komponen atau elemen-elemen menjadi satu kesatuan yang berhubungan satu sama lain dan berkerja sama sesuai dengan fungsi tertentu untuk mencapai suatu tujuan atau sasaran yang ingin dicapai. Sistem tercipta untuk mengatasi sebuah masalah agar apa yang diingankan menjadi kenyataan, dan sistem tidak bisa berdiri sendiri karena hakikatnya sistem adalah satu kesatuan yang utuh.
2. Karakteristik Sistem
Menurut Edhy Sutanta, ST (2001:4) “Suatu sistem pempunyai karakteristik atausifat-sifat tertentu yaitu mempunyai komponen (components), mempunyai batas sistem (boundary), mempunyai lingkungan (environments), mempunyai penghubung/antar muka (interface) antar komponen, mempunyai (input), mempunyai pengolahan (processing), mempunyai keluaran (output), mempunyai sasaran (objective) dan tujuan (goal), mempunyai kendali (control), dan mempunyai umpan balik (feed back).
a. Komponen sistem (components system)
Komponensistem adalah segala sesuatu yang menjadi bagian penyusun sistem. Komponensistem dapat berupa benda nyata ataupun abstrak. Komponen sistem disebutsebagai subsistem, dapat berupa orang, benda, hal atau kejadian yang terlibatdidalam sistem.
b. Mempunyai Batas sistem (boundary)
Batas sistem diperlukan untuk membedakan satu sistem dengan sistem lain. Tanpa adanya batas sistem maka sangat sulit untuk menjelaskan suatu sistem. Batas sistem akanmemberikan batasan scope tinjauan terhadap sistem.
c. Mempunyai Lingkungan (environment)
Lingkungan sistem adalah segala sesuatu yang berada di luar sistem. Lingkungan sistemdapat menguntungkan ataupun merugikan. Umumnya, lingkungan yang menguntungkan akan selalu dipertahankan untuk menjaga keberlangsungan sistem. Sedangkan lingkungan sistem yang merugikan akan diupayakan agar mempunyai pengaruh seminimal mungkin, bahkan jika mungkin ditiadakan.
d. Mempunyai Penghubung/antar muka (interface) antar komponen
Penghubung/antar mukamerupakan komponen sistem, yaitu segala sesuatu yang bertugas menjembatanihubungan antar komponen dalam sistem. Penghubung/antar muka merupakan saranayang memungkinkan setiap komponen saling berinteraksi dan berkomunikasi dalamrangka menjalankan fungsi masing-masing komponen. Dalam dunia komputer,penghubung/antar muka dapat berupa berbagai macam tampilan dialog layar monitoryang memungkinkan seseorang dapat dengan mudah mengoperasikan sistem aplikasikomputer yang digunakannya.
e. Mempunyai Masukan (input)
Masukan merupakankomponen sistem, yaitu segala sesuatu yang perlu dimasukkan ke dalam sistemsebagai bahan yang akan diolah lebih lanjut untuk menghasilkan keluaran yangberguna. Dalam sistem Informasi Manajemen, masukan di sebut sebagai data.
f. Mempunyai Pengolahan (processing)
Dalam sisteminformasi manajemen, pengolahan adalah berupa program aplikasi komputer yangdikembangkan untuk keperluan khusus.Program aplikasi tersebut mampu menerima masukan, mengolah masukan, danmenampilkan hasil olahan.
a. Mempunyai Keluaran (output)
Keluaran merupakankomponen sistem berupa berbagai macam bentuk keluaran yang dihasilkan olehkomponen pengolahan.
b. Mempunyai Sasaran (objective) dan Tujuan (goal)
Setiap komponen dalam sistem perlu dijaga agar saling bekerja sama dengan harapan agar mampu mencapaisasaran dan tujuan sistem. Sasaran berbeda dengan tujuan. Sasaran sistem adalahapa yang ingin dicapai oleh sistem untuk jangka waktu yang relative pendek.Sedangkan tujuan merupakan kondisi/hasil akhir yang ingin dicapai oleh sistemuntuk jangka waktu yang panjang. Dalam hal ini, sasaran merupakan hasil padasetiap tahapan tertentu yang mendukung upaya pencapaian tujuan.
c. Mempunyai Kendali (control)
Bagian kendalimempunyai peran utama menjaga agar proses dalam sistem dapat berlangsung secaranormal sesuai batasan yang telah ditetapkan sebelumnya. Dalam sistem informasimanajemen, kendali dapat berupa validasi masukan, validasi proses, maupunvalidasi keluaran yang dapat dirancang dan dikembangkan secara terprogram.
2. Klasifikasi Sistem
a. Sistem Abstrak (Abstract System) dan Sistem Fisik (Physical System)
b. Sistem abstrak (abstract system) adalah sistemyang berupa pemikiran atau gagasan yangtidak tampak secara fisik. Misalnya, sistem teologi, yaitu sebuah pemikirantentang hubungan antara manusia dengan Tuhan.
c. sistemfisik (physical system)
d. Sistem Alamiah (Natural System) dan Sistem Buatan Manusia (Human ModeSystem).
- Sistemalamiah (natural system) yaitu sistemyang terjadi melalui proses alam, tidak dibuat manusia. Misalnya perputaran bumi.
- Sistem buatan manusia (human mode system) yaitu sistem yang dirancang oleh manusia. Sistembuatan manusia yang melibatkan interaksi antara manusia dengan mesin.
e. Sistem Tertentu (Deterministic System) dan Sistem Tak Tertentu (Probabilitas System)
- Sistem tertentu melibatkan operasi yang sudah dapat diduga dengan pasti, dapat dideteksi dan diramalkan hasil keluarannya, contohnya adalah sistem komputer dimana tingkah lakunya dapat diatur dengan baris-barisprogram yang dijalankan.
- Sistem tak tentu (Probabilitas System) yaitu sistem yang tidak dapat diprediksikan kejadiannya, misalnyakejadian-kejadian dimasa yang akan datang merupakan hal rahasia dan tidak dapatdiprediksikan karena menyangkut unsur probabilitas.
f. Sistem Tertutup(Closed System) dan Sistem Terbuka (Opened System)
- Sistem tertutup yaitu merupakan sistem yang tidak terpengaruh atau tidak tergangguoleh lingkungan luarnya. Karena bekerja secara otomatis tanpa campur tangan dari pihak luarnya. Walaupuntidak ada sistem yang benar-benar tertutup, yang ada hanyalah sistem relatiftertutup (relatively closed system).
- Sistem terbuka adalah sistem yang bekerja karenapengaruh dari pihak luarnya. Oleh karena itu perlu adanya sistem pengendalian yang dapat menjaga agar pengaruh tersebut hanya berupa pengaruh yang baik saja.
Menurut Mustakini (2009:54), Suatu sistem memiliki klasifikasi sebagai berikut:
a. Suatu sistem mempunyaikomponen-komponen sistem (components)atau subsistem-subsistem.
Suatu sistem terdiri dari sejumlah komponen-komponen yangsaling berinteraksi, yang artinya saling bekerja sama dalam membentuk suatukesatuan. Komponen sistem tersebut dapat berupa suatu bentuk sub-sistem.
b. Suatu sistem mempunyaibatas sistem (boundary).
Batasan sistem membatasi antara sistem yang satu denganyang lainnya atau sistem dengan lingkungan luarnya.
c. Suatu sistem mempunyailingkungan luar (environment).
Lingkungan luar sistem adalah suatu bentuk apapun yang adadiluar ruang lingkup atau batasan sistem yang mempengaruhi operasi sistemtersebut.
d. Suatu sistem mempunyaipenghubung (interface).
Penghubung sistem merupakan media yang menghubungkan sistem dengansub-sistem yang lain, dengan demikian dapat terjadi suatu integrasi sistem yangmembentuk suatu kesatuan.
e. Suatu sistem mempunyaitujuan (goal).
Suatu sistem pasti mempunyai tujuan (goals)atau sasaran sistem (objective).Sebuah sistem dikatakan berhasil apabila mengenai sasaran atau tujuannya, jikasuatu sistem tidak mempunyai tujuan maka operasi sistem tidak akan ada gunanya.
Konsep Dasar Kontrol
1. Definisi Kontrol
Menurut Erinofiardi (2012:261), “Suatu system control otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia(otomatis)”.
Konsep dasar pengontrolan sudah ada sejak abad-18 yang dipelopori James Watt yang membuat kontrol mesin uap, Nyquis (1932) membuat sistem pengendali uang tertutup, Hazem (1943) membuat Servo mekanik dan masih banyak yang lainnya.
Kontrol otomatis mempunyai peran pentingdalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmupengetahuan dan teknologi, sistem kontrol otomatis telah mendorong manusiauntuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengancara yang lebih mudah, efisien dan efektif. Adanya kontrol otomatis secaratidak langsung dapat menggantikan peran manusia dalam meringankan segalaaktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD)pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan,pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukantenaga ahli perencanaan sistem pengendali dan perancangan desain sistempengendali, termasuk teknisi profesional sebagai operator. Tidak menutup kemungkinanbahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungankarena teori sistem pengendali modern dikembangkan guna mengatasi kerumitanyang dijumpai pada berbagai system pengendalian yang menuntut kecepatan danketelitian yang tinggi dengan hasil output yang optimal.
Menurut beberapa teori diatas dapat disimpulkan bahwa pengontrolan adalah pengendalian suatu proses sistem kerja yang dapat dikendalikan sesuai dengan keinginan manusia dalam mengerjakan segala aktivitas.
2. Jenis – Jenis Sistem Kontrol
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka (Open-loop Control System) dan Sistem Pengendali Loop Tertutup ( Closed-loop Control System ).
a. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi (2012:261) sistem kontrol loop terbuka adalah ”suatu sistem kontrolyang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikianpada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian.”

Gambar 2.1. Sistem pengendali loop terbuka
Sumber : Erinofiardi (2012:261)
Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
b. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012:261) sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.” Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.

Gambar 2.2. Sistem pengendali loop tertutup
Sumber : Erinofiardi(2012:261)
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.
Konsep Dasar Robot
Definisi Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunkana pengawasan dan kontrol manusia, ataupun program yang telah didefinisikan terlebih dahulu. Istilah robot berasal dari bahasa Cheko “robota” yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan.
Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Biasanya kebanyakan robot industri digunakan dalam bidang produksi. Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan tolong" (search and rescue), dan untuk pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah tangga, seperti penyedot debu, dan pemotong rumput.
Saat ini hampir tidak ada orang yang tidak mengenal robot, namun pengertian robot tidaklah dipahami secara sama oleh setiap orang. Sebagian membayangkan robot adalah suatu mesin tiruan manusia(humanoid), meski demikian humanoid bukanlah satu-satunya jenis robot.
Pada kamus Webster pengertian robot adalah An automatic device that performs function ordinarily ascribed to human beings (sebuah alat otomatis yang melakukan fungsi berdasarkan kebutuhan manusia)
Dari kamus Oxford diperoleh pengertian robot adalah: A machine capable of carrying out a complex series of actions automatically, especially one programmed by a computer. (Sebuah mesin yang mampu melakukan serangkaian tugas rumit secara otomatis, terutama yang diprogram oleh komputer). Sumber: http://id.wikipedia.org/wiki/Robot (25-02-2014)
Dari penjelasan diatas dapat disimpulkan bahwa robot merupakan alat mekanik yang tersusun dari rangkaian elektonika atau sebuah mesin yang mampu melakukan tugas fisik secara otomatis yang diprogram dengan apa yang diinginkan oleh manusia.
2. Sejarah Robot
Tahun 1890 : Nikola Tesla mendesain pertama kali sebuah alat remote control kendaraan. Tesla juga dikenal sebagai penemu radio, motor industri dan kumparan tesla
Tahun 1892 : Di USA, Seward Babbit mendesain derek bermotor yang dilengkapi dengan cengkeraman (Grippper)
Tahun 1921 : Referensi pertama kata robot muncul dalam pembukaan drama di London, berjudul Rossum's Universal Robots. Kata robot berasal dari kata Ceko, robota, yang berarti membosankan atau budak-seperti tenaga kerja. Istilah ini pertama kali digunakan oleh Dramawan Ceko, Karel Capek, untuk menggambarkan robot yang membantu memudahkan pekerjaan manusia dan mengerjakan pekerjaan yang berulang. Dalam drama ini diceritakan ketika berada dalam medan pertempuran, robot malah berbalik melawan manusia dan mengambil alih kekuasaan dunia.
Tahun 1938 : Seorang berkebangsaan America Willard Pollard dan Harold Roselund membuat mekanisme penyemprotan cat yang dapat diprogram untuk perusahaan De Vilbiss
Tahun 1940 : Grey Walters "Machina Speculatrix" berhasil menciptakan robot pertama kali yang diberi nama Elsie si- kura-kura.
Tahun 1941 : Penulis fiksi ilmiah pertama Isaac Asimov menggunakan kata "robot" untuk menggambarkan teknologi robot dan memprediksi bangkitnya industri robot yang kuat
Tahun 1942 : Asimov menulis cerita tentang robot dengan judul “Runaround” yang didalamnya terdapat tiga hukum perilaku robot (Three Law of Robotics).
3. Jenis-Jenis Robot
Secara umum robot dibedakan menjadi 3 kategori :
· Robot Industri
Robot industri didedikasikan untuk mengerjakan pekerjaan dalam industri manufaktur atau industri yang lain yang berbahaya apabila dilakukan oleh pekerja manusia. Robot ini juga digunakan untuk mengerjakan proses – proses yang berulang secara terus menerus tanpa perubahan. Dalam industri modern, robot industri dapat secara mudah diprogram untuk mengerjakan aplikasi yang baru.
· Robot Research/ Service
Robot ini digunakan untuk eksplorasi dan pengumpulan data. Biasanya digunakan pada aplikasi luar angkasa, bidang kedokteran, dan peralatan rumah tangga. Robot research tidak hanya digunakan untuk berinteraksi dengan lingkungan, tetapi mampu bereaksi dengan cepat sehingga biasa disebut “Artifical Intelligence”.
· Robot Edukasi
Robot edukasi didesain se-interaktif mungkin menyerupai mainan sehingga dapat digunakan sebagai bahan atau peralatan pembelajaran. Biasanya robot ini juga digunakan dalam pertandingan robotika sebagai implementasi dari pembelajaran ilmu pengetahuan tentang robot.
4. Hukum Robot
Isaac Asimov, sebagai Bapak Robotika, mengeluarkan “Three Law of Robotics” pada tahun 1942. Kemudian menambahkan satu poin hukum robotika sehingga dikenal menjadi “The Zeroth Law” sebagai berikut :
· Hukum 0 : sebuah robot tidak boleh menyakiti manusia atau tanpa aksi sehingga mengijinkan manusia untuk datang menyakiti.
· Hukum 1 : sebuah robot tidak boleh menyakiti manusia atau tanpa aksi sehingga mengijinkan manusia untuk datang menyakiti, kecuali jika melanggar hukum yang lebih tinggi.
· Hukum 2 : sebuah robot harus menuruti perintah manusia kecuali jika perintah tersebut melanggar hokum.
· Hukum 3 : sebuah robot harus melindungi eksistensinya selama tidak bertentangan dengan hokum.
Konsep Dasar Bluetooth
1. Definisi Bluetooth
Menurut Dwi Agus Diartono (2009:70) “Bluetooth adalah sebuah teknologi komunikasi wireless (tanpa kabel) yang beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM Industrial, Scientific and Medical) dengan menggunakan sebuah frequency hopping transceiver yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host Bluetooth dengan jangkauan layanan yang terbatas.
Kesimpulannya adalah tekhnologi Bluetooth mampu menyediakan layanan komunikasi tanpa kabel berupa data dan suara serta jangkauan layanannya sangat terbatas tergantung dari frekuensinya.
2. Sejarah Bluetooth
Menurut Dwi Agus Diartono(2009:70) “Nama bluetooth berawal dari proyek prestisius yang dipromotori oleh perusahaan-perusahaan raksasa internasional yang bergerak di bidang telekomunikasi dan komputer, diantaranya Ericsson, IBM, Intel, Nokia, dan Toshiba”.
Proyek ini di awal tahun 1998 dengan kode nama Bluetooth, karena terinspirasi oleh seorang raja Viking (Denmark) yang bernama Harald Blatand. Raja tersebut membiayai para ilmuan dan insinyur untuk membangun sebuah proyek berteknologi metamorfosa yang bertujuan untuk mengontrol pasukan dari suku-suku di daerah Skandinavia tersebut dari jarak jauh. Maka untuk menghormati ide Raja Viking tersebut, yaitu Blatand yang berarti Bluetooth (dalam bahasa inggris) nama dari proyek tersebut.
a. Pertama diliris untuk Bluetooth versi 1.0 dan 1.0 pada tanggal 26 Juli 1999 produk ini belum sempurna, karena mempunyai banyak masalah.
b. Pada bulan Oktober ditahun yang sama. Bluetooth telah diperbarui dan dirilis versi 1.1 dan 1.2, untuk versi ini telah dilakukan penyempurnaan.
c. Dengan bertambahnya perusahaan manufaktur pendukung, antara lain 3Com, Ericsson, IBM, Intel, Lucent Technlogies, Microsoft, Motorola, Nokia dan Toshiba. Maka mengalamiperbaikan-perbaikan untuk versi 2.0-nya.
3. Aplikasi dan Layanan Bluetooth
Menurut Dwi Agus Diartono (2009:71) “Sebuah perangkat yang meiliki teknologi wireless Bluetooth akan mempunyai kemampuan untuk melakukan pertukaran informasi dengan jarak jangkauan sampai dengan 10 meter (~30 feet), bahkan untuk daya kelas 1 bisa sampai pada jarak 100 meter. Sistem bluetooth menyediakan layanan komunikasi point to point maupun komunikasi point to multipoint”.
Produk Bluetooth dapat berupa PC card atau USB adapter yang dimasukkan ke dalam perangkat. Perangkat-perangkat yang dapat diintegerasikan dengan teknologi Bluetooth anatara lain : mobile PC, mobile phone, PDA (Personal Digital Assiteant), headset, kamera digital, printer, router dan sebagainya. Aplikasi-aplikasi yang dapat disediakan oleh layanan Bluetooth ini antara lain : PC to PC file transfer, PC to PC file synch (notebook to laptop), PC to mobile phone, PC to PDA, wireless headset, dan sebagainya

Gambar 2.3. Contoh modul aplikasi bluetooth
Sumber : DWI Agus Diartono (2009:72)
4. Deskripsi Umum Sistem Bluetooth
Menurut Siyamta (2005:7) “ Sistem Bluetooth terdiri dari sebuah radio transceiver, baseband link Management dan Control, Baseband (processor core, SRAM, UART, PCM USB Interface), flash dan voice code sebuah link manager”.
Baseband link controller menghubungkan perangkat keras radio ke baseband processing dan layer protocol fisik. Link manager melakukan aktivitas-aktivitas protocol tingkat tinggi seperti melakukan link setup, autentifikasi dan konsfigurasi.
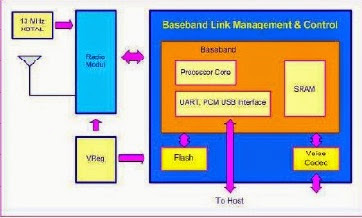
Gambar 2.4. Blok fungsional sistem bluetooth
Sumber : Siyamta (2005:7)
5. Fungsi Security
Bluetooth dirancang untuk memiliki fitur-fitur keamanan sehingga dapat digunakan secara aman baik dalam lingkungan bisnis maupun rumah tangga. Fitur-fitur yang disediakan Bluetooth anatara lain sebagai berikut :
a. Enkripsi data
b. Autentikasi pengguna
c. Fast frekensi-hopping(1600 hops/sec)
d. Output power control
Fitur-fitur tersebut menyediakan fungsi-fungsi keamanan dari tingkat kemanan layer fisik atau radio yaitu gangguan dari penyadapan sampai dengan tingkat keamanan layer yang lebih tinggi sepert password dan PIN. Dalam sistem komunikasi Bluetooth setiap orang berpotensi mendengarkan. Oleh karena itu issue utama dalam sistem ini adalah menjamin bagaimana informasi dapat didengar oleh yang tidak berhak. Prinsip keamanan dalam Bluetooth pada dasarnya dilaksanankan dengan dua tahapan.
Pertama, otentikasi (authentication) yaitu metoda yang menyatakan bahwa informasi itu betul-betul asli atau perangkat yang mengakses informasi betul-betul perangkat yang dimaksud.
Kedua, enkripsi(encryption) yaitu suatu proses yang dilakukan untuk mengamankan sebuah pesan (yang disebut plaintext) menjadi pesan yang tersembunyi (disebut ciphertext).
Diagram blok untuk enkripsi dan otentikasi ditunjukkan pada gambar dibawah ini :

Gambar 2.5. Diagram blok enkripsi dan otentikasi
Sumber : Siyamta (2005:25)
Konsep Dasar Metode Penelitian
Dalam sebuah penelitian terdapat beberapa konseep dasar metode diantaranya
1. Perancangan
a. Flowchart
Menurut Sulindawati di dalam Jurnal SAINTIKOM (2010:8),“Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urutan-urutan prosedur dari suatu program”.
Menurut Adelia dan Jimmy Setiawan (2011:116), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Dapat disimpulkan bahwa Flowchart adalah bentuk gambar/diagram yang mempunyai aliran satu atau dua arah secara sekuensial.
2. Pengujian
a. White Box
Menurut Sodikin di dalam Jurnal Teknologi Informasi(2009:750), “Pengujian White Box berfokus pada strukutur control pengguna”.
b. Black Box
Menurut Siddiq (2012:4), “Pengujian black box adalah pengujian aspek fundamental sistem tanpa memperhatikan struktur logika internal perangkat lunak”. Metode ini digunakan untuk mengetahui apakah perangkat lunak berfungsi dengan benar.
Menurut Budiman (2012:4), “Pengujian black box merupakan metode perancangan data uji yang didasarkan pada spesifikasi perangkat lunak. Data uji dibangkitkan, dieksekusi pada perangkat lunak dan kemudian keluaran dari perangkat lunak diuji apakah telah sesuai dengan yang diharapkan”.
3. Flowchart
Menurut Adelia di dalam Jurnal Sistem Informasi (2011:116), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Menurut Sulindawati Fathoni di dalam Jurnal SAINTIKOM (2010:8), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Flowchart biasanya mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan di evaluasi lebih lanjut. Bila seorang analisi dan programmer akan membuat flowchart, ada beberapa petunjuk yang harus diperhatikan,yaitu:
1. Flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
2. Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapat dimengerti oleh pembacanya.
3. Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas
4. Setiap langkah dari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.
5. Setiap langkah dari aktifitas harus berada pada urutan yang benar
6. Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
7. Gunakan simbol-simbol flowchart yang standart.
Teori Khusus
Konsep Dasar Mikrokontroler
1. Definisi Mikrokontroler
Menurut Sumardi (2013:1), “Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaranserta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus,cara kerja mikrokontroler sebenarnya membaca dan menulis data”.
MenurutDipranonoto (2010:3), bahwa “Mikrokontroller adalah sebagai “single chip computer yang memilikikemampuan untuk diprogram dan digunakan untuk tugas-tugas yang berorientasi control”.
Daribeberapa definisi-definisi diatas dapat disimpulkan bahwa Mikrokontroler sebagaiotak/pengatur suatu sistem terkomputerisasi yang didalamnya terdapat beberapakomponen-kompenen yang memiliki fungsi tertentu seperti RAM, ROM, CPU, I/O,Clock dan komponen lainnya dalam sebuah keping tunggal, serta mempunyai inputdan output serta kendali dengan program yang bisa ditulis dan dihapus dengancara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data.
2. Karakteristik Mikrokontroler
Menurut Malik dan Mohammad Unggul Juwana (2009:2), karakteristik mikrokontroler mempunyai beberapa komponen-komponen yaitu:
a. CPU (Central Procesing Unit)
b. RAM (Read Only Memory)
c. I/O (Input/Output)
Adapun ketiga komponen tersebut secara bersama-sama membentuk sistem komputer dasar. Beberapa mikrokontroler memiliki tambahan komponen lain, misalnya ADC (Analog Digital Converter), Timer/Counter, dan lain-lain.
Menurut Sumardi (2013:2), mikrokontroler memiliki karakteristik sebagai berikut :
a. Memiliki program khusus yang disimpan dalam memori untuk aplikasitertentu, tidak seperti PC yang multifungsi karena mudahnya memasukkan program. Program mikrokontroler relatif lebih kecil daripada program-program pada PC.
b. Konsumsi daya kecil.
c. Rangkaiannya sederhana dan kompak.
d. Harganya murah , karena komponennya sedikit.
e. Unit I/O yang sederhana, misalnya LCD, LED, Latch.
f. Lebih tahan terhadap kondisi lingkunganekstrim, misalnya temperature tekanan, kelembaban, dan sebagainya.
Mikrokontroller ATmega328
1. Arsitektur Mikrokontroller ATmega328
Mikrokontroler ATmega328 memiliki beberapakriteria standard yaitu memiliki 32KB Flash Programmable dan 1 KB EEPROM yang dapat diprogram ulangsekitar 1000 kali write atau erase cycle, 2 KB SRAM, 14 jalur I/O, 6pin analog, dua buah 16 bit timer/counter,dengan arsitektur lima vector, empat-level interrupt, full duplex serialport, on-chip oscillator dan onchiptimer/counter.
Mikrokontroler ATmega328 beroperasi pada frekuensi clock sampai 16 Mhz. ATmega328 memilikidua Power Saving Mode yang dapatdikontrol melalui software, yaitu Idle Mode dan Power Down Mode. Pada IdleMode, CPU tidak aktif sedangkan isi RAM tetap dipertahankan dengan timer/counter, serial port dan interruptsystem tetap berfungsi. Pada PowerDown Mode, isi RAM akan disimpan tetapi osilatornya tidak akan berfungsisehingga semua fungsi dari chip akanberhenti sampai mendapat reset secarahardware.
2. Konfigurasi Pin ATmega328
Mikrokontroller merupakansebuah processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyaibentuk yang jauh lebih kecil dari suatu komputer pribadi dan computermainframe, mikrokontroler dibangun dari elemen – elemen dasar yang sama.Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakaninstruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting danutama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuatoleh seorang programmer.
Program ini menginstruksikankomputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer konfigurasi pin ATmega328dapat dilihat pada gambar berikut:

Gambar 2.6. Konfigurasi PIN ATMega328
Sumber : jurnal Syahid (2012:34)
MenurutSyahid (2012:34) ATMega328 memiliki 3 buah PORT utama yaitu PORTB,PORTC, dan PORTD dengan total pin input/outputsebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai periperial lainnya.
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu PORTB jugadapat memiliki fungsi alternatif seperti di bawah ini.
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikansebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakanjalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalurpemograman serial (ISP).
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagaisumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagaiberikut.
a. ADC6 channel(PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kitagunakan untuk mengubah input yangberupa tegangan analog menjadi data digital.
b. I2C (SDA dan SDL) merupakan salah satu fitur yangterdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasidata tipe I2C seperti sensor kompas, accelerometernunchuck.
3. Port D
Port D merupakan jalur data 8 bityang masing-masing pin-nya juga dapatdifungsikan sebagai input/output. Samaseperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasiserial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan dataserial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untukmenerima data serial.
b. Interrupt(INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakansebagai selaan dari program, misalkan pada saat program berjalan kemudianterjadi interupsi hardware/softwaremaka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kitajuga dapat memanfaatkan clock dariCPU, sehingga tidak perlu membutuhkan externalclock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
1. Fitur Mikrokontroller ATmega328
ATmega328 adalah mikrokontroller keluarandari atmel yang mempunyai arsitektur RISC ( ReduceInstruction Set Computer) yang dimana setiap proses eksekusi data lebihcepat dari pada arsitektur CISC ( Completed Instruction Set Computer).
a. Mikrokontroller ini memilikibeberapa fitur antara lain :
1. 130 macam instruksi yang hampir semuanyadieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatanmencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flashmemory dan pada arduino memiliki bootloaderyang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM ( Electrically Erasable Programmable Read Only Memory) sebesar1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM( Static Random Access Memory)sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM ( Pulse Width Modulation) output.
8. Master / SlaveSPI Serial interface.
b. Mikrokontroller ATmega328 memiliki
arsitektur Harvard
Yaitu memisahkan memori untuk kodeprogram dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism.
1. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satuinstruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalamsetiap satu siklus clock.
2. 32x 8 -bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapatdilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakansebagai 3 buah register pointer 16-bit pada mode pengalamatan tak langsunguntuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit inidisebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28dan R29 ), dan register Z ( gabungan R30 dan R31 ).
3. Hampir semua instruksi AVR memiliki format 16-bit. Setiapalamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serba guna di atas,terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagairegister control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsiI/O lainnya. Register – register ini menempati memori pada alamat 0x20h –0x5Fh.
Untuk mengetahui alur hubungan dari architectureATmega328 dapat di lihat pada gambar berikut:

Gambar 2.7. Arsitektur ATmega328
Sumber: http://duinoworks.bakketti.com/
c. Memori
ATmega328mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader. ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM(yang dapat dibaca dan ditulis (RW/readand written) dengan EEPROM library).
d. Input dan Output
</p>Setiap 14 pin digital padaATmega328 dapat digunakan sebagai input dan output,menggunakan fungsi pinMode(), digitalWrite(),dan digitalRead(). Fungsi-fungsi tersebutberoperasi di tegangan 5 Volt. Setiap pindapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuahresistor pull-up (terputus secara default) 20-50 kOhm. Selain itu.
Beberapa pinmempunyai fungsi-fungsi spesial:
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) danmemancarkan (TX) serial data TTL (Transistor-Transistor Logic). Kedua pinini dihubungkan ke pin-pin yangsesuai dari chip Serial ATmega8U2USB-ke-TTL.
2. External Interrupts: 2 dan 3. Pin-pinini dapat dikonfigurasikan untuk dipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan ataupenurunan yang besar, atau suatu perubahan nilai. Lihat fungsi attachInterrupt() untuklebih jelasnya.
3. PWM: 3, 5, 6, 9,10, dan 11. Memberikan 8-bitPWM output dengan fungsi analogWrite().
4. SPI: 10 (SS), 11(MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPImenggunakan SPI library.
5. LED: 13. Ada sebuah LED yang terpasang, terhubungke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
ATmega328 mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda).Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk menggantibatas atas dari rangenya dengan menggunakan pin AREF dan fungsi analogReference().Di sisi lain, beberapa pin mempunyai fungsi spesial:
a. TWI: pin A4 atauSDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library
b. Ada sepasang pin lainnya pada board:
c. AREF. Referensi tegangan untuk input analog.Digunakan dengan analogReference().
d. Reset. Membawa saluran ini LOW untuk mereset mikrokontroler. Secara khusus, digunakan untukmenambahkan sebuah tombol reset untuk melindungi yang memblock sesuatu padaboard.
e. ATmega328 menyediakan serialkomunikasi UART TTL (5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX).Sebuah Atmega 16U2 pada channel board serial komunikasinya melalui USB danmuncul sebagai sebuah port virtual kesoftware pada komputer. Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan. Bagaimanapun, pada Windows, sebuah file infpasti dibutuhkan. SoftwareArduino mencakup sebuah serialmonitor yang memungkinkan data tekstual terkirim ke dan dari board Arduino. LEDRX dan TX pada board akan menyala ketika data sedang ditransmit melalui chipUSB-to-serial dan koneksi USB padakomputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1).
f. Sebuah Software Serial library memungkinkanuntuk komunikasi serial pada beberapapin digital ATmega328.
g. ATmega328 juga mensupportkomunikasi I2C (TWI) dan SPI. Software Arduino mencakup sebuah Wire library untuk memudahkanmenggunakan bus I2C, Untuk komunikasi SPI, gunakan SPI library. ATmega328 Memerlukan Board Arduino Uno Sebagai bootloaderyang memungkinkan kita untuk menguploadkode baru ke ATmega328 menggunakan pemrogram hardware eksternal yaitu Board ArduinoUno. ATmega328 berkomunikasi menggunakan protokol STK500.
Arduino Uno Board
Arduino dikatakan sebagai sebuah platform dari physicalcomputing yang bersifat open source. Pertama-tama perlu dipahamibahwa kata “platform” di sini adalah sebuah pilihan kata yang tepat. Arduinotidak hanya sekedar sebuah alat pengembangan, tetapi kombinasi dari hardware,bahasa pemrograman dan Integrated Development Environment (IDE)yang canggih. IDE adalah sebuah software yang sangat berperan untuk menulisprogram, meng-compile menjadi kode biner dan meng-upload ke dalammemory microcontroller.
Menurut Feri Djuandi (2011:8) “Komponen utama didalam papan Arduinoadalah sebuah mikrokontroler 8 bit dengan merk ATmega yang dibuat oleh Atmel Corporation. Berbagai papan Arduinomenggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya.,sebagai contoh Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560yang lebih canggih menggunakan ATmega2560.”
Pada gambar berikut ini diperlihatkan contoh diagram blok sederhanadari mikrokontroler ATmega328 yang dipakai pada Arduino Uno.

Gambar 2.8. Diagram Blok Arduino Uno
Sumber : E-Book Pengenalan Arduino Feri Djuandi (2011:8)
Blok-blok diagram dijelaskan sebagai berikut :
- Universal Asynchronus Reseiver/Transmitter (UART) adalah antar muka yang digunakan yang digunakan untukkomnikasi serial seperti pada RS-232, RS-442 dan RS-485.
- 2KB RAM pada memori kerjabersifat volatile (hilang saat dayadimatikan), digunakan oleh variabel-variabel di dalam program.
- 32KB RAM flash memori bersifat non-volatile, digunakan untuk menyimpan program yang dimuatdari computer. Selain program, flash memori juga menyimpan bootloader. Bootloader adalah program inisiasiyang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah bootloader selesai dijalankan,berikutnya program didalam RAM akan dieksekusi.
- 1KB EEPROM bersifat non-volatile, digunakan untuk meyimpandata yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papanArduino.
- Central Processing Unit (CPU), bagian darimikrokontroleruntuk menjalankan setiap instruksi dari program.
- Port Input dan Output, pin-pinuntuk menerima data (input) digital atau analog, dan mengeluarkan data (output)digital atau analog.
Bagian-bagian Arduino Uno
Setelah mengenal bagian-bagianutama dari mikrokontroler ATmega328 sebagai komponen utama, selanjutnya menjelaskantentang bagian-bagian dari papan Arduino itu sendiri.
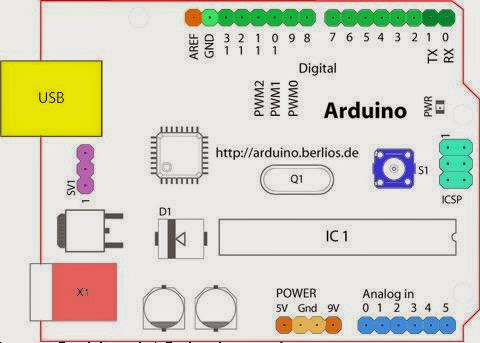
Gambar 2.9. Bagian-bagian Arduino Uno Board
Sumber : E-Book Pengenalan Arduino Feri Djuandi (2011:9)
Bagian-bagian komponen dari Arduino Board dapat dijelaskan sebagaiberikut:
- 14 pin input/outputdigital (0-13)
Berfungsi sebagai input atau output, dapat diatur olehprogram. Khusus untuk 6 buah pin 3, 5, 6, 9, 10 dan 11, dapat juga berfungsisebagai pin analog output dimana tegangan output-nya dapat diatur. Nilai sebuahpin output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilaitegangan 0 – 5V.
- USB
Berfungsiuntuk:· Memuat program darikomputer ke dalam papan .
· Komunikasi serialantara papan dan Komputer.
· Memberi daya listrikkepada papan.
- Sambungan SV1
Sambungan atau jumper untuk memilih sumber dayapapan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidakdiperlukan lagi pada papan Arduino versi terakhir karena pemilihan sumber dayaeksternal atau USB dilakukan secara otomatis.
- Q1 – Kristal (quartzcrystal oscillator)
Jika mikrontroler dianggap sebagai sebuah otak, makakristal adalah jantung-nya karena komponen ini menghasilkan detak-detak yangdikirim kepada microcontroller agar melakukan sebuah operasi untuk setiapdetak-nya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16MHz).
- Tombol Reset S1
Untuk me-reset mikrokontroler sehingga program akan mulailagi dari awal. Perhatikan bahwa tombol reset ini bukan untuk menghapus programatau mengosongkan mikrokontroler. </p></div>
- In-CircuitSerial Programming (ICSP)
Port ICSP memungkinkan pengguna untuk memprogram mikrokontrolersecara langsung, tanpa melalui bootloader. Umumnya pengguna Arduino tidakmelakukan ini sehingga ICSP tidak terlalu dipakai walaupun disediakan.
- IC 1 – MikrokontrolerATmega
Komponen utama dari papan Arduino, di dalamnya terdapatCPU, ROM dan RAM.
- X1 – sumber daya eksternal
Jika hendak disuplai dengan sumber daya eksternal, papanArduino dapat diberikan tegangan DC antara 9-12V.
- 6 pin input analog (0-5)
Pin ini sangat berguna untuk membaca tegangan yangdihasilkan oleh sensor analog, seperti sensor suhu. Program dapat membaca nilaisebuah pin input antara 0 – 1023, dimana hal itu mewakili nilai tegangan 0 –5V.
Konsep Dasar Motor Servo
Motor servo adalah sebuah motor DC yangdilengkapi rangkaian kendali dengan sistem closedfeedback yang terintegrasi dalam motor tersebut. Pada motor servo posisiputaran sumbu (axis) dari motor akandiinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.

Gambar 2.10. Bentuk fisik motor servo standar
Sumber: http://elektronika-dasar.web.id
Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) ataupotensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukanbatas maksimum putaran sumbu (axis)motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebarpulsa yang pada pin kontrol motor servo.
Motor servo adalah motor yang mampu bekerja dua arah(CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikandengan memberikan variasi lebar pulsa bagian pin kontrolnya.
- Jenis motor servo
a. Motorservo standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehinggatotal defleksi sudut dari kanan – tengah – kiri adalah 180°.
b. Motorservo continuous Motor servo jenisini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar(dapat berputar secara kontinyu).
Pulse kontrolmotor servo operasional motor servo dikendalikan oleh sebuah pulse selebar ± 20 ms, dimana lebar pulse antara 0.5 ms dan 2 ms menyatakanakhir dari range sudut maksimum. Apabila motor servo diberikan pulse dengan besar 1.5 ms mencapai gerakan 90°, maka bila kitaberikan pulse kurang dari 1.5 ms maka posisi mendekati 0° dan bilakita berikan pulse lebih dari 1.5 ms maka posisi mendekati 180°. Gambar pulse kendali motor servo dapat dilihat padagambar 2.10 sebagai berikut:
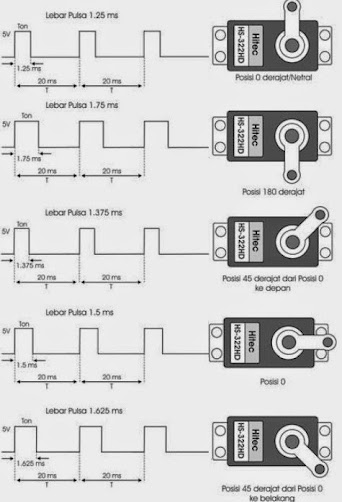
Gambar 2.11. Pulsa kendali motor servo
Sumber: http://elektronika-dasar.web.id
Motor servo akan bekerja secara baik jika pada bagianpin kontrolnya diberikan sinyal PWMdengan frekuensi 50 Hz. Dimana padasaat sinyal dengan frekuensi 50 Hztersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah(sudut 0°/ netral). Pada saat Ton dutycycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akanberputar ke berlawanan arah jarum jam (CounterClock wise, CCW) dengan membentuk sudut yang besarnya linier terhadapbesarnya Ton duty cycle, dan akanbertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, makarotor akan berputar searah jarum jam (ClockWise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton
duty cycle, dan bertahan diposisitersebut.Konsep Dasar Komponen Elektronika
1. Definisi elektronika
Menurut Chandra (2011:9), “Komponen-komponenelektronika dibagi dalam jenis komponen pasif dan komponen aktif”.
Menurut Rusmadi (2009:10), komponen elektronika dibagimenjadi 2 kelompok yaitu:
a. Komponen Pasif
Menurut Rusmadi (2009:10) bahwa “Komponen pasif adalahkomponen-komponen elektronika yang apabila dialiri aliran listrik tidakmenghasilkan tenaga seperti: perubahan tegangan, pembalikan fasa, penguatan danlain-lain”.
Menurut Rusmadi (2009:10), ada beberapa komponen yangtermasuk dalam komponen pasif di antaranya adalah:
1. Resistor atau Tahanan
2. Kapasitor atau Kondensator
3. Trafo atau Transformator
b. Komponen aktif
Menurut Rusmadi (2009:33), bahwa “Komponen aktifadalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatutenaga baik berbentuk penguatan maupun mengatur aliran listrik yangmelaluinya”.
Menurut Rusmadi (2009:33), ada beberapa yang termasukkomponen aktif antara lain adalah:
1. Dioda
2. Transistor
3. IC(Intragated Circuit)
4. Thyristoratau SCR (Silicon Controller Recifier)
Konsep Dasar Resistor
Menurut John (2010:21), “Tahanan atau dikenal juga tahanan listrik,resistor atau dengan istilah lain yakni werstan.Besarnya nilai tahanan dinyatakan dalam Ohm ()”.
Berdasarkanhokum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalirmelaluinya. Satuan resistansi darisuatu resistor disebut Ohm ataudilambangkan dengan simbol W(Omega). Untuk menghitung hambatan padaresistor dapat menggunakan rumus sebagai berikut:

Keterangan :
V = tegangan listrik (volt )
I = arus yang mengalir (ampere)
R = tahanan (ohm)
Untuk mengetahui nilai resistor berdasarkan warnanyadapat dilihat pada table 2.3 sebagai berikut:
Tabel 2.1. Tabel baca resistor

Penjelasan dari kode warna resistor pada gambar 2.12 sebagai berikut:
Kode I, menyatakan angka ke satu
Kode II, menyatakan angka ke dua
Kode III, menyatakan faktor pengali
Kode IV, menyatakan nilai toleransi atau batasantara nilai tahanan terbesar dengan nilai tahanan yang terkecil.
Misalkan diketahui warna tahanan terdiri dari merah-hijau-orange-emas,berarti nilai resistansinya = 25.000 ohm ±5% = 25 K ohm ± 5%.
Nilai maksimal dari resistansinya = 25.000 +(25.000 X 5%) = 26.250 ohm.
Nilai maksimal dari resistansinya = 25.000 - (25.000 X 5%) = 26.250 ohm.
Menurut macamnya resistor terbagi atas dua macam yaitu:
1. Resistor Tetap ( Fixed Resistor)
Menurut Rusmadi (2009:11) bahwa Resistor tetapadalah resistor yang memiliki nilai hambatan yang tetap tidak dapat diubah-ubah. Apabila nilai tahanannya semakin besar, maka arus semakin kecil.Sebaliknya bila nilai tahanannya kecil, maka arus yang mengalir semakin besar.Resistor memiliki batas kemampuan daya misalnya : 1/16 watt, 1/8 watt, ¼ watt,½ watt. Artinya resitor hanya dapat dioperasikan dengan daya maksimal sesuai dengan kemampuan dayanya. Adapun resistor tidak tetap dapat dilihat pada gambar2.12.

2. Resistor Tidak Tetap (Variable Resistor)
Menurut Rusmadi (2009:16), bahwa “Resistor tidak tetap adalah resistor yang nilairesistansinya (tahananya) dapat dirubah-rubah sesuai dengan keperluan danperubahannya dapat dilakukan dengan jalan mengeser atau memutar pengaturnya”. Jenisnya antara lain : hambatan geser,trimpot dan potensiometer. Yang banyak digunakan ialah trimpot danpotensimeter.
a. Tahanan Variabel adalahjenis tahanan yang resistansinya bisadiubah-ubah, seperti Potensiometer dengancara diputar dan Trimpot (trimerpotensiometer).
b. LDR (Light Dependent Resistance) adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahayadan membesar apabila tidak terkena cahaya.
c. NTC (negative thermal coeffisien) danPTC (positive thermal coeffisien) adalah jenis tahanan yang nilai tahanannyadipengaruhi oleh perubahan suhu. NTC pada suhu yang tinggi nilai tahanannyaturun dan pada suhu yang rendah nilai tahananya naik, sedangkan PTCkebalikannya pada suhu yang tinggi nilai tahanannya naik dan pada suhu yangrendah nilai tahanannya turun.
Adapun resistor tidak tetap dapat dilihat seperti pada gambar 2.13 sebagai berikut:
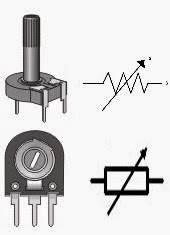
Gambar 2.13. Bentuk fisik dan simbol resistor tidak tetap Konsep Dasar Kapasitor atau kondensator
Menurut John (2010:61), “Kapasitor adalah komponen elektronika yang dapat digunakan untuk menyimpan muatan listrik”.
Pengertian lain kapasitor adalah komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas, elektrolit dan lain-lain.
Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan padasaat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknyamuatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung-ujung kakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuat dengan kapasitansi atau kapasitas. Untuk melihat kontruksi dari kapasitor, dapat dilihat pada gambar 2.14 sebagai berikut:
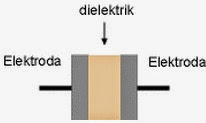
Gambar 2.14. Susunan lapisan kapasitor
Sumber: http://elektronika-dasar.web.id
Kapasitansi didefenisikan sebagai kemampuan darisuatu kapasitor untuk dapat menampung muatan elektron. Coulombs padaabad 18 menghitung bahwa 1 coulomb =6.25 x 1018 elektron. Kemudian Michael Faraday membuat postulat bahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1farad jika dengan tegangan 1 volt dapat memuat muatan elektron sebanyak 1 coulombs. Dengan rumus dapat ditulis :
Q = CV Dimana :
Q = muatan elektron dalam C (coulomb)
C = nilai kapasitansi dalam F (farad)
V = besar tegangan dalam V (volt)
Dalam praktek pembuatan kapasitor, kapasitansidihitung dengan mengetahui luas area plat metal (A), jarak (t) antara keduaplat metal (tebal dielektrik) dankonstanta (k) bahan dielektrik. Dengan rumusan dapat ditulis sebagai berikut :
C = (8.85 x10-12) (k A/t)
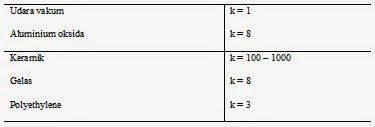
Contoh konstanta (k) dari beberapa bahan dielektrik yang disederhanakan dapat dilihat pada tabel 2.4 sebagai berikut:
Tabel 2.2. Bahan dielektrik yang di sederhanakan
a. PrinsipPembentukan Kapasitor
1. Jikadua buah plat atau lebih yang berhadapan dan dibatasi oleh isolasi, kemudianplat tersebut dialiri listrik maka akan terbentuk kondensator (isolasi yangmenjadi batas kedua plat tersebut dinamakan dielektrikum).
2. Bahandielektrikum yang digunakanberbeda-beda sehingga penamaan kapasitor berdasarkan bahan dielektrikum. Luas plat yang berhadapan bahan dielektrikum dan jarak kedua plat mempengaruhi nilaikapasitansinya.
3. Padasuatu rangkaian yang tidak terjadi kapasitor liar. Sifat yang demikian itudisebutkan kapasitansi parasitic.Penyebabnya adalah adanya komponen-komponen yang berdekatan pada jalurpenghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan.
Gambar 2.15. Lapisan dalam kapasitor
Sumber: http://elektronika-dasar.web.id
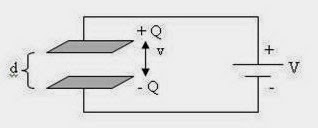
Gambar 2.15 diatas menunjukan bahwa ada dua buah platyang dibatasi udara. Jarak kedua plat dinyatakan sebagai d dan tegangan listrikyang masuk. Besaran KapasitansiKapasitas dari sebuah kapasitor adalah perbandingan antara banyaknya muatanlistrik dengan tegangan kapasitor dapat ditulis menggunakan rumus sebagaiberikut: C = Q / V
Jika dihitung dengan rumus C= 0,0885 D/d. Makakapasitasnya dalam satuan piko farad
D = luas bidang plat yang salingberhadapan dan saling mempengaruhi dalamsatuan cm2.
d = jarak antara plat dalam satuan cm. Bilategangan antara plat 1 volt danbesarnya muatan listrik pada plat 1 coulomb, maka kemampuan menyimpanlistriknya disebut 1 farad. Dalamkenyataannya kapasitor dibuat dengan satuan dibawah 1 farad. Kebanyakan kapasitor elektrolitdibuat mulai dari 1 mikrofarad sampaibeberapa milifarad.
a. Jenis-jeniskapasitor sesuai bahan dan konstruksinya.
Kapasitor seperti juga resistornilai kapasitansinya ada yang dibuat tetap dan ada yang variabel. Kapasitor dielektrikum udara, kapasitansinyaberubah dari nilai maksimum ke minimum. Kapasitor variabel sering kita jumpai pada rangkaian pesawat penerima radiodibagian penala dan osilator. Agar perubahan kapasitansi di dua bagian tersebutserempak maka digunakan kapasitor variabel ganda. Kapasitor variabel gandaadalah dua buah kapasitor variabeldengan satu pemutar. Berdasarkan dielektrikumkapasitor dibagi menjadi beberapa jenis, antara lain:
1. kapasitorkeramik
2. kapasitorfilm kapasitor elektrolit
3. kapasitortantalum
4. kapasitorkertas
Berdasarkanpolaritas kutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu :
1. KapasitorNon-Polar, kapasitor yang tidakmemiliki polaritas pada kedua elektroda dan tidak perlu dibedakan kakielektrodanya dalam pesangannya pada rangkaian elektronika.
2. Kapasitor Bi-Polar,yaitu kapasitor yang memiliki polaritas positif dan negatif pada elektrodanya,sehingga perlu diperhatikan pesangannya pada rangkaian elektronika dan tidakboleh terbalik. Kapasitor elektrolit dan kapasitor tantalum adalah kapasitoryang mempunyai kutub atau polar, sering disebut juga dengan nama kapasitorpolar. Kapasitor film terdiri dari beberapa jenis yaitu polyester film, poly propylene film.
Konsep Dasar Trafo atau Transformator
1. Definisi Trafo atau Transformator
MenurutRusmadi (2009:61), bahwa “Trafo adalah alat yang dibuah dari gulungan kawatyang fungsinya memindahkan tenaga dari bagian input yaitu gulungan primer ke bagian outputnya yaitu gulungansekundernya”.
Bentukpemidahan ini biasanya dapat berupa perubahan tegangan maupun frekuensi atauinduktansi, perubahannya bisa berupa kenaikan suatu harga dan bisa juga berupapenurunan harga.

Gambar 2.16. Trafo
Sumber: Rusmadi (2009:61)
Dalambidang elektronika tenyata penggunaan alat yang menggunakan prinsip gulungakawat memegang peranan penting dan banyak ragamnya.
MenurutRusmadi (2009:61) berdasarkan kegunaanya jenis gulungan kawat dapat dibagimenjadi 3 yaitu:
1. GulunganTungagal Yangdimaksud gulungan tunggal adalah yang di bagian tengahnya dipercabangkan. Padagulungan tunggal, bagian primer dan sekundernya menjadi satu seperti padagambar di bawah ini.
2. GulunganInduktif Trafoyang digunakan sebagai trafo catu daya pada umumnya menggunakan prinsipgulungan induktif adalah gulungan yang terdiri dari 2 buah gulungan. Gulunganpertama disebut gulungan primer yang dipakai sebagai inputnya dan gulungan kedua disebut dulungan sekunder yangdipergunakan sebagain outputnya. Gulungan sekunder bekerja berdasarkan prinsipkerja induksi dari gulungan primernya seperti pada gambar dibawah ini.
3. GulunganInduktif Bertap Padadasarnya Gulungan Induktif Bertap hamper sama dengan Gulungan Induktif yaituterdiri dari 2 buah gulungan yaitu Gulungan primer dan gulungan sekunder, hanyapada beberapa tempat pada bagian gulungan sekunder disadap dan sipercabangkandengan tujuan untuk mendapatkan tegangan yang dikehendaki.
Konsep Dasar Dioda
1. DefinisiDioda