SI1433480843
PROTOTYPE ALAT PENGANTAR MAKANAN
BERBASIS ARDUINO MEGA PADA
BUKIT PELAYANGAN RESTO

Disusun Oleh :
NIM : 1433480843
NAMA : ALFIANTORO
FAKULTAS SAINS DAN TEKNOLOGI
PROGRAM STUDI SISTEM KOMPUTER
KONSENTRASI CREATIVE COMMUNICATIVE AND INNOVATIVE TECHNOLOGY
TANGERANG
TA. 2018/2019
UNIVERSITAS RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTYPE ALAT PENGANTAR MAKANAN
BERBASIS ARDUINO MEGA PADA
BUKIT PELAYANGAN RESTO
Disusun Oleh :
NIM |
: 1433480843
|
Nama |
|
Fakultas |
: Sains dan Teknologi
|
Program Pendidikan |
: Strata 1
|
Program Studi |
: Sistem Komputer
|
Konsentrasi |
: Creative Communicative and Innovative Technology
|
Disahkan Oleh :
Tangerang, Juli 2019
| Rektor |
Ketua Program Studi
| ||||
| Universitas Raharja |
Program Studi Sistem Komputer
| ||||
| (Dr. Po. Abas Sunarya, M.Si) |
(Ageng Setiani Rafika,S.Kom.,M.Si)
| ||||
| NIP : 000603 |
NIP : 13001
|
UNIVERSITAS RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTYPE ALAT PENGANTAR MAKANAN
BERBASIS ARDUINO MEGA PADA
BUKIT PELAYANGAN RESTO
Dibuat Oleh :
NIM |
: 1433480843
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Fakultas Sains dan Teknologi
Program Studi Sistem Komputer
Konsentrasi Creative Communicative and Innovative Technology
Disetujui Oleh :
Tangerang, 15 Juli 2019
| Pembimbing I
|
Pembimbing II
| ||
| (Ignatius Joko Dewanto, Dr.,S.Kom.,MM)
|
(Diah Aryani, S.T.,M.Kom)
| ||
| NID : 150022
|
NID : 11010
|
UNIVERSITAS RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTYPE ALAT PENGANTAR MAKANAN
BERBASIS ARDUINO MEGA PADA
BUKIT PELAYANGAN RESTO
Dibuat Oleh :
NIM |
: 1433480843
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Fakultas Sains dan Teknologi
Program Studi Sistem Komputer
Konsentrasi Creative Communicative and Innovative Technology
TA. 2018/2019
Disetujui Oleh :
Tangerang, September 2019
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
UNIVERSITAS RAHARJA
LEMBAR KEASLIAN SKRIPSI
PROTOTYPE ALAT PENGANTAR MAKANAN
BERBASIS ARDUINO MEGA PADA
BUKIT PELAYANGAN RESTO
Disusun Oleh :
NIM |
: 1433480843
|
Nama |
|
Fakultas |
: Sains dan Teknologi
|
Program Pendidikan |
: Strata 1
|
Program Studi |
: Sistem Komputer
|
Konsentrasi |
: Creative Communicative and Innovative Technology
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana baik di lingkungan Universitas Raharja maupun di Universitas lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
Tangerang, 15 Juli 2019
| NIM : 1433480843
|
)*Tanda tangan dibubuhi materai 6.000;
ABSTRAKSI
Perkembangan dan kemajuan teknologi dalam dunia kuliner membuat para pengusaha harus lebih kreatif untuk membuat usaha restoran mereka agar tidak kalah bersaing dari restoran yang lainnya. Penelitian ini bertujuan untuk membuat Prototipe Alat Pengantar Makanan Berbasis Arduino mega adalah sebagai terobosan terbaru dalam dunia kuliner juga sebagai salah satu cara menarik perhatian pelanggan dan juga sebagai ciri khas sebuah restoran. Prototipe ini menggunakan RFID sebagai tujuan pengantar makanan, dengan menggunakan Arduino Mega sebagai mikrokontroler yang akan memberi perintah kepada RFID untuk membaca ID yang berada pada meja dan motor Stepper sebagai penggerak alat.
Kata Kunci: Prototipe Pengantar Makanan, Arduino Mega, Radio-Frequency Identification
ABSTRACT
The development and technological advancement in the world of culinary make the entrepreneurs have to be more creative to make their restaurant business is no less competitive than other restaurants. This research aims to create a Prototype Tool introduction to the Arduino-based Foods is the latest breakthrough in the world of as culinary as well as one way of attracting the attention of customers and also as the hallmark of a restaurant. The prototype uses a color code as the purpose of an introduction to food, using NodeMcu ESP8266 as a microcontroller that will give orders to the tcs3200 color sensor to read the color codes that are on the table and a DC motor as mover tool.
Keyword: Prototype Food Delivery, Arduino Mega, Radio-Frequency Identification
KATA PENGANTAR
Alhamdulillah, puji dan syukur atas kehadirat Allah SWT yang telah melimpahkan rahmat dan karunianya sehingga penulis dapat menyelesaikan Skripsi dengan judul “PROTOTYPE ALAT PENGANTAR MAKANAN BERBASI ARDUINO MEGA PADA BUKIT PELAYANGAN RESTO”.
Tujuan penulisan Laporan Skripsi ini adalah sebagai syarat dalam menyelesaikan Program Pendidikan Strata 1 Program Studi Sistem Informasi pada Universitas Raharja.
Penulis menyadari bahwa tanpa adanya bimbingan dan dorongan dari banyak pihak penulis tidak akan dapat menyelesaikan Skripsi ini dengan baik dan tepat pada waktunya. Pada kesempatan ini pula penulis menyampaikan ucapan terimakasih kepada :
- Bapak Dr. Po. Abas Sunarya, M.Si. selaku Rektor Universitas Raharja.
- Bapak Dr. Henderi, S.Kom., M.Kom. selaku Dekan Fakultas Universitas Raharja.
- Bapak Padeli, M.Kom. selaku Wakil Dekan Fakultas Sains dan Teknologi Universitas Raharja.
- Ibu Rafika S.Kom., MSi. selaku Ketua Program Studi Sistem Informasi.
- Bapak Ignatius Joko Dewanto, Dr., S.Kom., MM. sebagai Dosen Pembimbing I yang telah memberikan bimbingan dan masukan kepada penulis sehingga Skripsi ini dapat diselesaikan dengan baik.
- Ibu Diah Aryani, S.T.,M.Kom. sebagai Dosen Pembimbing II yang telah meluangkan waktunya untuk memberikan bimbingan, masukan dan motivasi kepada penulis.
- Bapak Noval Ardian elaku stakeholder yang telah memberikan kontribusi besar di dalam lancarnya proses penelitin skripsi ini.
- Bapak dan Ibu Dosen serta Staff Universitas Raharja yang telah memberikan bekal ilmu pengetahuan dan motivasi kepada penulis.
- Keluarga tercinta yang telah memberikan doa, dukungan moril maupun materil sehingga Skripsi ini dapat terselesaikan dengan baik
- Teman - teman seperjuangan yang selalu ada dan memberikan semangat.
- Dan semua pihak yang tidak dapat disebutkan satu persatu.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari sempurna. Oleh karena itu kritik dan saran yang membangun, penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan ini bermanfaat bagi pihak yang membutuhkan.
Tangerang, 15 Juli 2019
| NIM : 1433480843
|
Daftar isi
DAFTAR TABEL
- Tabel 2.1 Kelebihan dan Kekurangan Prototype
- Tabel 2.2 Kelebihan dan Kekurangan Black Box
- Tabel 3.1 Tabel SWOT
- Tabel 3.2 Matriks Analisa SWOT Yang Berjalan
- Tabel 3.3 Elisitasi Tahap I
- Tabel 3.4 Elisitasi Tahap II
- Tabel 3.5 Elisitasi Tahap III
- Tabel 3.6 Final DraftElisitasi
- Tabel 4.1 Pengujian Black Box Pada Saat Terhubung Website
- Tabel 4.2 Pengujian Black Box Pada Website
- Tabel 4.3 Pengujian Black Box Updload Output Pada Website
- Tabel 4.4 Pengujian Black Box Pada Wifi
- Tabel 4.5 Pengujian Black Box Pada Wifi
- Tabel 4.6 Estimasi Biaya Yang Dikeluarkan
DAFTAR GAMBAR
- Gambar 2.1 Sitem Kendali Lup Terbuka
- Gambar 2.2 Sistem Kendali Lup Tertutup
- Gambar 2.3 Diagram Blok Sistem Robot Boat Navigasi Tanpa Awak
- Gambar 2.4 Flowchart Program (Program Flowchart)
- Gambar 2.5 Simbol Flowchar Proses
- Gambar 2.6 Flowchart Proses (Process Flowchart)
- Gambar 2.7 Arduino
- Gambar 2.8 Tampilan RFID Mifare RC522
- Gambar 2.9 Reader & Transporter RFID
- Gambar 2.10 Stepper motor
- Gambar 2.11 Contoh Push Button Switch
- Gambar 3.1 Struktur Organisasi Bukit Pelayangan resto
- Gambar 3.2 Flowchart Sistem Yang Berjalan
- Gambar 3.3 Flowchart Sistem Usulan Keseluruhan
- Gambar 3.4 Diagram Blok Motor Stepper
- Gambar 3.5 Diagram Blok RFID
- Gambar 3.6 Diagram Block NodeMcu
- Gambar 3.7 Software Arduino Yang Di Install
- Gambar 3.8 Tampilan Dunia
- Gambar 3.9 Device Manager
- Gambar 3.10 Memilih Port
- Gambar 3.11 Memilih Board Arduino Mega
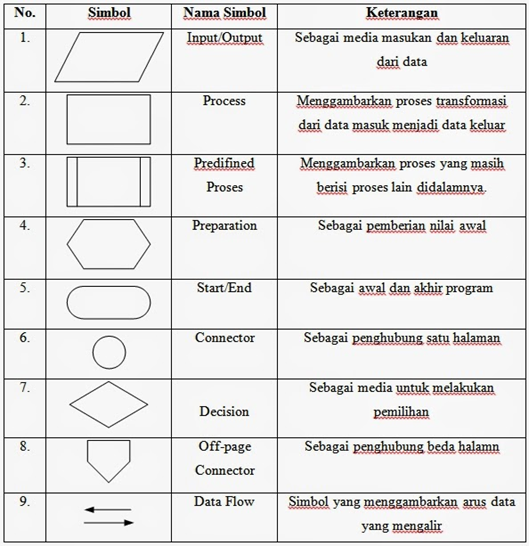
DAFTAR SIMBOL
DAFTAR SIMBOL FLOWCHART (DIAGRAM ALIR)
BAB I
Latar Belakang
Industri restoran atau rumah makan yang kita ketahui adalah sebuah tempat yang menyediakan makanan serta minuman dan memiliki fasilitasnya sendiri untuk memenuhi kebutuhan pelanggan. Industri ini sering kita jumpai dibanyak lokasi, di kota maupun ditempat terpencil yang memiliki resort wisata.
Pelayanan pada sebuah restoran memiliki fungsi penting dimana pelayan akan berhadapan langsung dengan para pelanggan. Dengan demikian peranan pelayan sangant berpengaruh sebagai tingkat kepuasan pelanggan dan kualitas restoran tersebut.
Dalam pengantaran makanan pada restoran ada sebuah sistem pengantaran makanan yang biasa dikirim oleh manusia, ada beberapa masalah apabila masih menggunakan sumber daya manusia karena terdapat kekurangan yaitu manusia bisa absen masuk kerja yang dikarenakan sakit atau masalah lainnya. Dan lainnya adalah masalah pembiyayaan manusia masih terlalu mahal karena mengikuti aturan pemerintah atau UMR (Upah Minimum Regional).
Sebuah robotika dibuat memiliki fungsi untuk mempermudah sesuatu pekerjaan, media pembelajaran, atau hanya sebagai media permainan. Sebagai contoh robot pramusaji yang saat ini banyak berkembang di negara-negara maju. Robot pengantar makanan tidak hanya sebagai alat untuk mempermudah pekerjaan juga sebagai alat untuk daya tarik sebuah restoran yang menggunakannya.
Dalam hal ini Bukit Pelayangan Resto yang bergerak dibidang restoran atau rumah makan memiliki pelayanan yang masih menggunakanan sumber daya manusia yang menurut penulis terdapat kekurangan seperti yang dijelaskan diatas. Maka dari itu penulis membuat alat pengantaran makanan yang nantinya dapat mengatasi masalah - masalah tersebut.
Dari latar belakang diatas maka penelitian ini mengambil judul “PROTOTYPE ALAT PENGANTAR MAKANAN BERBASIS ARDUINO MEGA PADA BUKIT PELAYANGAN RESTO”.
Rumusan Masalah
Berdasarkan latar belakang diatas, dapat ditarik beberapa rumusan permasalahan sebagai berikut :
- Bagaimana merancang prototype alat untuk mengantar makanan berbasis Arduino?
- Bagaimana mengendalikan sebuah alat pengantar makanan sesuai sistem yang diajukan/ dipesan?
Ruang Lingkup Penelitian
Ruang lingkup penelitian ini adalah merancang sebuah berbasis RFID dengan menggabungkan beberapa alat lainnya dan menjadi sebuah prototype alat pengantar makanan dimana untuk menjawab rumusan masalah di atas. Dimana cakupan penelitian ini meliputi :
- Prototype menggunakan RFID sebagai otak untuk pengontrolan alat agar dapat bekerja.
- Motor Dc sebagai penggerak roda yang akan menggerakan alat dari satu tempat ke tempat lainnya.
- Motor Driver sebagai pengontrol kecepatan dana rah gerak Motor DC.
- Sensor RFID sebagai titik pemberhentian sebuah meja yang dituju.
Tujuan dan Manfaat Penelitian
Dalam penulisan laporan ini peneliti memiliki tujuan sebagai berikut:
Tujuan Penelitian
-
Menghasilkan prototype alat pengantar makanan dalam menghidangkan makanan dan minuman untuk pelanggan di Bukit Pelayangan Resto.
-
2. Menghasilkan analisis dan perancangan alat pengantar makanan dalam menghidangkan makanan dan minuman untuk pelanggan di Bukit Pelayangan Resto.
Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah:
-
Dapat meningkatkan pelayanan yang lebih efisien.
-
Dapat meningkatkan minat pengunjung dengan adanya alat pengantar makanan.
-
Dapat memberikan pelayanan yang lebih modern.
Metode Penelitian
Metode yang digunakan dalam penulisan Skipsi ini terdiri dari tahapan:
Metode Pengumpulan Data
Pada tahapan ini dilakukan pengumpulan data dengan wawancara dan studi kepustakaan.
Wawancara dilakukan dengan pihak BUKIT PELAYANGAN RESTO untuk mengetahui kebutuhan penunjang operasional yang sedang berjalan di BUKIT PELAYANGAN RESTO ini. Khususnya terkait dengan perawatan dan pengawasan terhadap bayi yang baru dilahirkan.
Sedangkan studi kepustakaan dilakukan dengan cara mengumpulkan informasi melalui sumber buku dan tulisan terkait dengan Arduino maupun laporan KKP yang terdahulu sebagai referensi. Sumber-sumber lain yang mendukung penelitian ini di peroleh melalui internet seperti penelitian-penelitian dan jurnal-jurnal yang telah ada.
Metode Analisa
Pada tahap ini dilakukan analisa jaringan dan sistem yang telah di implementasikan dan telah berjalan di BUKIT PELAYANGAN RESTO tersebut. Kemudian dilakukan penelitian terhadap kekurangan dan kelebihan terhadap sistem yang sedang berjalan.
Metode Perancangan
Pada tahap ini dilakukan perancangan alat Pengantar Makanan pada Bukit Pelayangan Resto dan di implementasikan dari sistem yang telah di rancang.
Metode Prototype
Metode yang dipakai adalah metode prototype evolutionary, karena dengan evolutionary ini sistem atau produk yang sebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatas menuju produk final.
Metode Pengujian
Metode testing ini digunakan untuk menganalisa suatu identitas sistem untuk mendeteksi, mengevaluasi kondisi dan fitur-fitur yang diinginkan dan mengetahui kualitas dari suatu sistem yang dilakukan untuk mendeteksi kesalahan yang terjadi saat sistem diterapkan. Penulis menggunakan metode Black Box karena metode Black Box dapat mengetahui apakah perangkat lunak yang dibuat dapat berfungsi dengan benar dan telah sesuai dengan yang diharapkan.
Sistematika Penulisan
Untuk memahami lebih jelas laporan ini, maka materi-materi yang tertera pada Laporan Tugas Akhir ini di kelompokan menjadi beberapa sub bab dengan sistematika penyampaian sebagai berikut:
BAB I PENDAHULUAN
Berisi tentang latar belakang, perumusan masalah, tujuan dan manfaat penelitian, ruang lingkup penelitian, dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini berisikan teori-teori dasar atau umum dan teori-teori khusus berupa pengertian dan definisi yang berkaitan dengan analisa serta permasalahan yang dibahas serta literature review yang berhubungan dengan penelitian.
BAB III PEMBAHASAN
Bab ini berisikan gambaran dan sejarah singkat BUKIT PELAYANGAN RESTO, struktur organisasi, metode penelitian, metode analisa, metode perancangan, metode perancangan prototype, metode pengujian.
BAB IV HASIL DAN UJI COBA
Bab ini berisi uji coba, metode black box, uji coba hardware, flowchar sistem yang diusulkan, diagram gambar sistem, rancangan program, konfigurasi sistem usulan, testing, implementasi, estimasi biaya.
BAB V PENUTUP
Bab ini berisi kesimpulan dan saran yang berkaitan dengan analisa dan optimalisasi sistem berdasarkan yang telah di uraikan pada bab-bab sebelumnya.
DAFTAR PUSTAKA
LAMPIRAN
BAB II
Teori Umum
Konsep Dasar Prototype
Pengertian Prototype
Menurut Rumini, dkk (2014:48), “Prototype adalah suatu versi sistem potensial yang disediakan bagi pengembang dan calon pengguna yang dapat memberikan gambaran bagaimana kira-kira sistem tersebut akan berfungsi bila telah disusun dalam bentuk yang lengkap”..
Fajarianto (2016:55) menjelaskan bahwa Prototype didefinisikan sebagai alat yang memberikan ide bagi pembuat maupun pemakai potensial tentang cara system berfungsi dalam bentuk lengkapnya, dan proses untuk menghasilkan sebuah prototype disebut prototyping.
Berdasarkan pada kedua kutipan yang diambil, maka dapat disimpulkan prototipe adalah sebuah sistem yang sederhana yang berguna untuk menggambarkan sebuah ide sebelum sistem tersebut diimplementasikan.
Pengertian Prototype
Menurut Azizah, dkk (2015:64),“Jenis-jenis prototipe secara general dibagi menjadi dua”, yaitu:
-
Rapid Throwaway Prototyping
Pendekatan pengembangan perangkat keras/Iunak ini dipopulerkan Soleh Gomaa dan Scoot (1981) yang saat ini telah digunakan secara luas oleh industri, terutama di dalam pengembangan aplikasi. Pendekatan ini biasanya digunakan dengan item yang berisiko tinggi (high-risk) atau dengan bagian dari sistem yang tidak dimengerti secara keseluruhan oleh para tim pengembang. Pada pendekatan ini, Prototype "quick and dirty" dibangun diverifikasi oleh konsumen, dan dibuang hingga Prototype yang diinginkan tercapai pada saat proyek berskala besar dimulai.
-
Prototype Evolusioner
Pada pendekatan evolusioner, suatu prototipe berdasarkan kebutuhan dan pemahaman secara umum. Prototipe kemudian diubah dan dievolusikan dari pada dibuang. Prototipe yang dibuang biasanya digunakan dengan aspek sistem yang dimengerti secara luas dan dibangun atas kekuatan tim pengembang. Prototipe ini juga didasarkan atas kebutuhan prioritas, kadang-kadang diacu sebagai “chunking” pada pengembang aplikasi (Hough, 1993).
Konsep Dasar Robotika
Pengertian Robotika
Maysheila (2015:4:6) mengemukakan Robotika merupakan perpaduan dari ilmu mekanik, elektronika dan komputer yang biasa disebut ilmu Mekatronika dan Intrumentasi Industri.
Febi Yanto. (2015:Vol.1:2), menjelaskan bahwa Robotika adalah multi disiplin ilmu yaitu komputer, elektronika, dan mekanika. Robotika merupakan satu cabang teknologi yang berhubungan dengan desain, konstruksi, operasi, disposisi struktural, pembuatan, dan aplikasi dari robot.
Berdasarkan kedua kutipan yang diambil, maka dapat disimpulkan robotika adalah rancangan ilmu teknologi yang disusun dengan matang dan diaplikasikan ke dalam sebuah robot.
-
Sistem kontrol Robotika
Sistem kontrol adalah suatu proses pengaturan/pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam rangkuman harga (range) tertentu. Dalam istilah lain disebut juga teknik pengaturan, sistem pengendalian atau sistem pengontrolan. Sistem kontrol robotik pada dasarnya terbagi menjadi dua kelompok, yaitu sistem kontrol loop terbuka (open loop) dan loop tertutup (close loop). Diagram kontrol loop terbuka pada sistem robot dapat dinyatakan pada gambar 1. Kontrol loop terbuka atau umpan maju (feedfoward control) dapat dinyatakan sebagai system kontrol yang outputnya tidak diperhitungkan ulang oleh kontroler. Keadaan apakah robot benar – benar telah mencapai target seperti yang dikehendaki sesuai referensi, adalah tidak dapat mempengaruhi kerja kontroler. Kontrol ini sesuai untuk sistem operasi robot yang memiliki aktuaktor yang beroprasi berdasarkan logika berbasis konfigurasi langkah sesuai urutan, misalnya motor stepper. Stepper motor tidak perlu dipasangi sensor pada porosnya untuk mengetahui posisi akhir. Jika dalam keadaan berfungsi baik dan tidak ada masalah beban lebih maka stepper motor akan berputar sesuai dengan perintah kontroler dan mencapai posisi target dengan cepat. Pada gambar 2, jika gerak hasil gerak aktual telah sama dengan referensi maka input kontroler akan nol. Artinya kontroler tidak lagi memberikan sinyal aktusi kepada robot karena target akhir perintah gerak telah diperoleh. Makin kecil error maka makin kecil pula sinyal pengemudian kontroler terhadap robot, sampai akhirnya mencapai kondisi tenang (steady state).