SI 0831461581
PEMANFAATAN RASPBERRY PI SEBAGAI ROBOT PEMBERSIH
PANEL SOLAR CELL MENGGUNAKAN MEDIA WIFI PADA
PT LANGGENG BAJA PRATAMA

Disusun Oleh :
NIM |
: 0831461581
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2014/2015
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PEMANFAATAN RASPBERRY PI SEBAGAI ROBOT PEMBERSIH PANEL SOLAR CELL
MENGGUNAKAN MEDIA WIFI
PADA PT. LANGGENG BAJA PRATAMA
Dibuat Oleh :
NIM |
: 0831461581
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2014/2015
Disetujui Penguji :
Tangerang, ... Februari 2015
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
ABSTRAKSI
Pembangkit listrik tenaga surya adalah pembangkit yang memanfaatkan sinar matahari sebagai sumber penghasil listrik. Alat utama untuk menangkap, perubah dan penghasil listrik adalah photovoltaic yang disebut secara umum panel surya. Energi cahaya matahari akan di serap oleh panel surya, jika dalam keadaan kotor maka daya serap energi cahaya akan berkurang berdasarka hal tersebut, diciptakannya suatu robot yang dapat membersihkan panel surya secara automatis dan dapat di kendalikan dari jarak jauh.
Untuk pengontrolan sistem pembersih panel solar cell tersebut menggunakan Raspberry Pi dan sebagai antar muka menggunakan perangkat android dengan memanfaatkan komunikasi WiFi. Robot pembersih penel surya ini merupakan penelitian awal yang dapat dikembangkan lebih jauh lagi, seperti ketersediaan access internet, sehingga dalam segi pengontrolan jarak jauh sudah tidak ada batasan lagiKata kunci : Panel surya, Raspberry Pi, Wifi.
Kata Kunci: Panel Solar Cell, Raspberry Pi, WiFi
ABSTRACT
Solar power plant is a plant that uses sunlight as a source of electricity .The primary tool to capture , change and generating electricity is called the photovoltaic solar panels in general . Solar light energy will be absorbed by the solar panels , if the dirty state of the absorption of light energy will be reduced based upon this, the creation of a robot that can clean the solar panels automatically and can be controlled remotely .
Cleaning system for controlling the solar cell panel using the Raspberry Pi and as an interface using android device by utilizing WiFi communication . Robot cleaners solar penel this is a preliminary study can be further developed , such as the availability of the internet accesse , so in terms of remote control is no longer limit.Key word : Panel solar cell, Raspberry Pi, Wifi.
Keywords: Solar Cell Panel, Raspberry Pi, WiFi
Puji syukur alhamdulillah, penulis panjatkan kehadirat Allah SWT yang telah memberikan seribu jalan, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Skripsi Penulis dapat berjalan dengan baik dan selesai dengan semestinya.
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, penulis mengambil data berdasarkan hasil observasi, wawancara, survey serta studi pustaka yang mendukung penulisan ini.
Hati kecil ini pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan laporan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan yang singkat ini, izinkanlah penulis menyampaikan selaksa pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I. selaku Presiden Direktur Perguruan Tinggi Raharja.
- Bapak Drs. PO. Abas Sunarya, M.Si selaku Direktur Perguruan Tinggi Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd. selaku Kepala Jurusan Sistem Komputer Perguruan Tinggi Raharja.
- Bapak Sudaryono, Dr.,Ir.,MPd selaku Dosen Pembimbing I Perguruan Tinggi Raharja yang telah berkenan memberikan bimbingan dan pengarahan kepada penulis.
- Bapak Indrianto., M.T selaku Dosen Pembimbing II Perguruan Tinggi Raharja yang telah berkenan memberikan bimbingan dan pengarahan kepada penulis.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kedua orang tua, yang telah memberikan dukungan, baik moril, materil maupun doa untuk keberhasilan kepada penulis.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari kesempurnaan. Oleh karena itu kritik dan saran yang membangun, penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, 27 Januari 2015 | |
| MOHAMAD RIZKI FAISAL | |
| NIM. 0831461581 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 Teori Umum
- 2.1.1 Konsep Dasar Panel solar Cell
- 2.1.2 Sistem Kontrol
- 2.1.3 Konsep Dasar Pengontrolan Jarak Jauh
- 2.1.4 Konsep Dasar Sistem Robotika
- 2.1.5 Konsep Dasar Prototipe======Konsep Dasar Jaringan======Konsep Dasar Internet Protokol
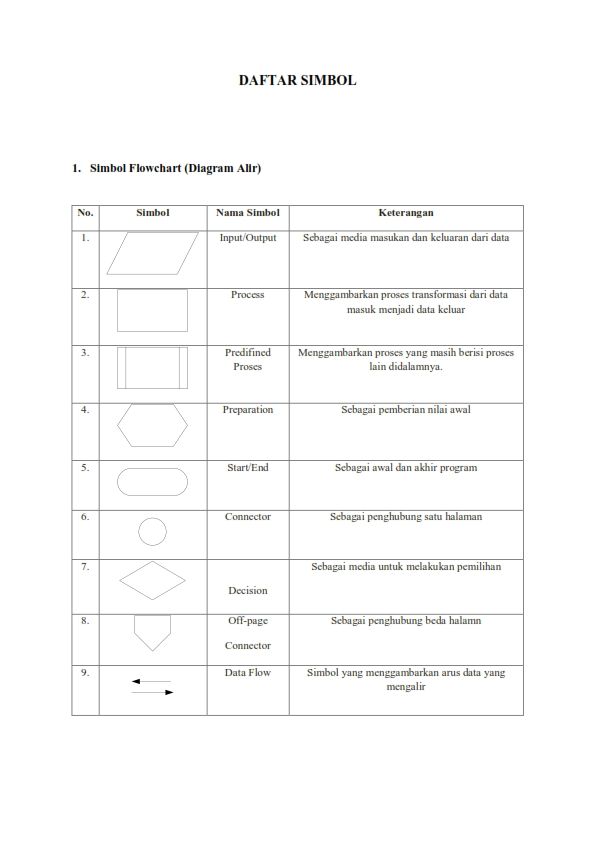
- 2.1.6 Access Point======Konsep Dasar DHCP======Flowchart
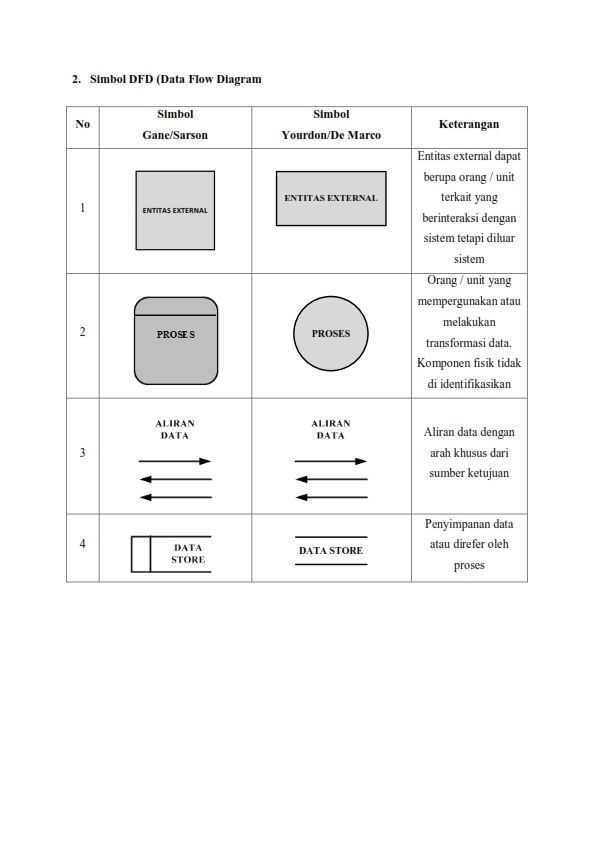
- 2.1.7 Data Flow Diagram======Metode Black Box======Metode White Box======Konsep Dasar Elisitasi
- 2.2 Teori Khusus
- 2.1 Teori Umum
- 3 BAB III
- 4 BAB IV
- 5 BAB V
- 6 DAFTAR PUSTAKA
- 7 DAFTAR LAMPIRAN
DAFTAR TABEL
DAFTAR GAMBAR
BAB I
Latar Belakang
Teknologi mengalami suatu kemajuan yangsangat pesat pada masa sekarang ini. Teknologi yang canggih telah mengantikanperalatan – peralatan manual yang membutuhkan banyak tenaga manusia untukpengoperasiannya. Salah satunya penggunaan robot . perkembangan teknologirobotika telah membuat kualitas kehidupan manusia semakin tinggi. Pada saat iniperkembangan teknologi robotika telah mampu meningkatkan kualitas dan kuantitasproduksi berbagai pabrik. Teknologi robotika juga sudah menjangkau sisihiburan, pendidikan dan, sebagai alat bantu pekerjaan manusia sehari – hari,sebagai contoh robot pembersih panel solar cell, yang membantu membersihkanpanel solar cell secara otomatis. Salah satu cara menambahkan tingkat kecerdasansebuah robot dengan menabahkan sensor pada robot.
.Tentu telah kita ketahui sumber tenagalistrik bukan hanya berasal dari bahan bakar minyak bumi saja, namun sudah berbagai macam caramendapatkan sumber tenaga listrik salah satunya adalah Pembangkit Listrik TenagaSurya (PLTS), pembangkit yang memanfaatkan sinar matahari sebagai sumberpenghasil listrik. Solar panel terdiri dari sejumlah sel silkon disebut jugasolar cell PV yang disinari matahari, yang lalu menghasilkan proton yangmembangkitkan arus listrik. Sekumpulan solar panel dalam satu sistem disebutarray. Banyaknya jumlah modul yang dapat disusun secara seri atau parallel akanmenentukan besarnya total output energi listrik yang dihasilkan.
Dari penjelasan diatas begitu utamanya panel solar cell sebagai salah satu komponen pembangkit listrik tenaga surya (PLTS). Tentunya dengan hal tersebut perlu adanya perawatan yang rutin dalam pemeliharaannya, karna jika panel solar cell dalam keadaan kotor atau berdebu berakibat berkurangnya daya serap panel solar cell untuk menyerap energi cahaya matahari. Untuk itu dibutuhkan suatu robot yang dapat bekerja secara otomatis sehingga memudahkan pekerjaan manusia dalam membersihkan panel solar cell.
Dalam pembuatan robot pembersih panel solar cell ini membutuhkan beberapa Motor DC sebagai penggerak robot dan Motor pump untuk memompa air. Untuk segi komunikasinya menggunakan media WIFI dan dapat dikontrol menggunakan perangkat gadget. Robot ini dirancang untuk membersihkan panel solar cell yang memiliki permukaan miring, robot ini dilengkapi empat roda dua diantaranya sebagai roda penggerak yang terhubung dengan Motor DC dan untuk alat pembersihnya dilengkapi sebuah wiper yang biasanya dipergunakan untuk pembersik kaca mobil dan sebuah motor pump untuk memompa air. Robot ini juga dilengkapi dua buah sensor jarak untuk mengatur pergerakan robot. Komponen yang tak kalah pentingnya adalah Raspberry Pi sebagai kendali utama robot, sehingga sistem gerak dari robot ini menjadi otomatis sesuai dengan program yang telah dibuat sebelumnya. Untuk komunikasinya Raspberry Pi dilengkapi WIFI untuk komunikasi dengan gadget.
Berdasaran permasalahan analisa yang ada, sehingga penulis mengambil judul "Pemanfaatan Raspberry Pi Sebagai Robot Pembersih Panel Solar Cell Menggunakan Media WIFI Pada PT. Langgeng Baja Pratama".
Rumusan Masalah
Berikut ini adalah beberapa perumusan masalah pada perancangan pemanfaatan Mini PC Raspberry Pi sebagai robot pembersih panel solar cell menggunakan media WIFI :
- Bagaimana membuat Robot Pembersih Panel Solar Cell dapat melakukan control otomatis ?
- Bagaimana cara Robot Pembersih Panel Solar Cell dapat berkomunikasi dengan gadget ?
- Komponen dan applikasi apa saja yang dibutuhkan, agar Robot Pembersih Panel Solar Cell dapat bekerja sesuai program yang dibuat sebelumnya ?
Ruang Lingkup Penelitian
Sebagai pembatasan pembahasan atas penyusunan laporan ini untuk tetap focus dan sesuai dengan tujuan yang ditetapkan, maka penulis memberikan ruang lingkup penelitian sebagai berikut :
- Sistem pengontrolan pembersih Panel Solar Cell menggunakan penggerak motor DC, dengan pergerakan Forward – Reverse
- Mengendalikan perangkat dengan menggunakan Mini PC Raspberry Pi.
- Komunikasi antara Mini PC Raspberry Pi dengan gadget menggunakan WIFI pada jaringan LAN (local area network).
- Untuk alat kelengkapan pembersih menggunakan wiper mobil dan motor micro pump.
- Untuk sistem sensor Robot Pembersih Panel Solar Cell dilengkapi dua buah sensor proximity.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Tujuan dari penelitian yang dilakukan adalah sebagai berikut :
- Tujuan Indifidual
- Penelitian ini dilaksanakan dengan tujuan untuk memenuhi persyaratan kelulusan skripsi.
- Merancang Robot Pembersih Panel Solar Cell menggunakan Mini PC Raspberry Pi.
- Meningkatkan kemampuan meniliti mandiri.
- Tujuan Fungsional
- Memperkenalkan konsep Automatic controlling berbasis Raspberry pi kepada dunia pendidikan, masyarakat akademis, dan industri dalam bentuk model dan prototipe.
- Untuk membantu mempermudah perawatan panel solar cell, agar pembangkit listrik tenaga surya dapat bekerja secara optimal.
- Tujuan Operasional
- Menerapkan ilmu secara terpadu dan terperinci sehingga berguna bagi perkembangan teknologi khususnya di lingkungan akademis.
- Sebagai tolak ukur kemampuan diri yang didapat selama menjalani pendidikan.
- Manfaat Individual
- Dapat memahami sistem kendali berbasis Raspberry Pi.
- Dapat memahami sistem jaringan.
- Dapat memahami tentang rangkain elektronika dan sistem sensor.
- Dapat membuat aplikasi maupun sistem kendali automatis berbasis Raspberry Pi.
- Manfaat Fungsional
- Dalam membersihkan panel solar cell jauh lebih ringan, dan juga dapat di control dari jarak jauh mengunakan media wifi.
- Dapat mempersingkat waktu dalam mempersihkan Panel Solar Cell.
- Manfaat Operasional :
- Dapat menekan biaya operasional, karena tidak perlu membayar orang untuk membersihkan panel solar cell.
- Observasi
Penting bagi penulis melakukan observasi untuk mengetahui jumlah kebutuhan input dan output suatu robot agar dapat bekerja secara otomatis.Melalui pengamatan dan pengalaman yang didapat penulis, menyimpulkan bahwa dibutuhkannya suatu alat pembersih panel solar cell yang efisien dan efektif, sehingga kinerja energi listrik tenaga surya dapat bekerja secara maksimal.
- Studi Pustaka
Mengumpulkan data dengan mencatat atau membaca dari buku-buku yang berguna dengan pokok permasalahan ataupun referensi lain. Sebagian besar metode diambil dari situs – situs internet, dan sisanya dari buku cetak. Penulis melakukan pengumpulan data dengan cara browsing, membaca beberapa bagian dari buku-buku referensi internet dan materi-materi perkuliahan yang berhubungan dengan sistem control jarak jauh berbasis raspberry. Sehingga diperoleh gambaran dari prinsip kerja suatu sistem control jarak jauh berbasis Raspberry Pi yang dapat penulis gunakan sebagai landasan pemahaman dalam perancangan dan pengerjaan prototipe robot pembersih panel solar cell menggunakan media WIFI.
- Fungsi – fungsi yang tidak benar atau hilang.
- Kesalahan interface.
- Kesalahan dalam struktur data atau akses basis data eksternal.
- Inisialisasi dan kesalahan terminasi.
- Validitas fungsional.
- Kesensitifan sistem terhadap nilai input tertentu.
- Batasan dari suatu data.
- Definisi Sistem Kontrol
- Klasifikasi Sistem Kontrol
- Sistem Kontrol Loop membuka
- Sistem Kontrol Loop Tertutup
- Sistem gerak robot berkaki
Sistem gerak robot berkaki memiliki keunikaan, yaitu meniru sistem gerak pada manusia (bi-pedal) maupun pada binatang (berkaki empat/quadrapod, berkaki enam/hexapod, berkaki banyak multipod). Semakin banyak kaki yang digunakan pada robot, diharapkan semakin seimbang robot tersebut pada saat berjalan. Robot berkaki merupakan robot yang cukup kompleks dalam perancangan dan pembuatanny, karna perlu mempertimbangkan beberapa factor diantaranya keseimbangan dan kecepatan - Sistem gerak robot stationary
Robot stationary biasanya berwujud manipulator lengan yang menyerupai fungsi dari lengan manusia. Jenis pola gerak lengan robot antara lain polar coordinate, cylindrical coordinate, Cartesian coordinate dan revolute coordinate. - Holonomic Drive
Holonomic drive adalah sistem gerak yang memungkinkan robot bergerak segala arah (dengan penggunaan roda omni-directional). Konfigurasi ini memungkinkan gerak rotasi dan transisi pada mobile robot. - Sistem Gerak Tank
Sistem gerak tank merupakan kombinasi dari tiga bagian yaitu drive sprocket, idler sprocket, dan track. Drive sprocket adalah sprocket yang menghubungkan langsung dengan motor, idler sprocket adalah sprocket yang membantu pergerakan track . track adalah bagian yang menghubungkan idler sprocket dengan derive sprocket serta mempunyai kontak langsung terhadap permukaan lantai yang di lalui. - Plastik
Material plastik dapat digunakan sebagai material kontruksi robot antara lain : - Acrylic atau polymethyl methacrylate (PMMA), sifatnya jernih, kuat, rentan terhadap keretakan akibat tekanan, mudah tergores, tersedia dalam bentuk lempengan dan batangan, cocok sebagai hiasan, atau sebagai tempat peletakan modul – modul robot.
- Nylon atau polyamide, memiliki karakter yang kuat, tidak mudah retak. Bahan ini cocok untuk menjadi penanggung beban robot atau sebagai roda, tersedia dalam bentuk lempengan dan batangan. Cocok untuk dijadiakn roda atau sprocket pada tank.
- Epoxies, sifatnya tahan lama, terang ,biasa digunakan sebagai perekat pada fiberglass, wujudnya berupa cairan (lem), pada bentuk padat dapat dipotong dan dilubangi.
- Phenolics, merupakan bahan asli material plastic, tidak mudah retak, berwarna hitam atau coklat muda, mudah dipotong dan dilubangi, contoh dari produk ini adalah papan elektronik/Printed Circuit Board (PCB).
- Polyvinyl chloride (PVC), bersih, tidak mudah retak, mudah dipotong – potong atau di lubangi, tersedia dalam bentuk pipa, mur, baut, batangan, lembaran, dan film. Cocok untuk digunakan untuk base robot.
- Kayu
- Logam
- Plastik
Material plastik dapat digunakan sebagai material kontruksi robot antara lain :
Acrylic atau polymethyl methacrylate (PMMA), sifatnya jernih, kuat, rentan terhadap keretakan akibat tekanan, mudah tergores, tersedia dalam bentuk lempengan dan batangan, cocok sebagai hiasan, atau sebagai tempat peletakan modul – modul robot. - Dat
Nylon atau polyamide, memiliki karakter yang kuat, tidak mudah retak. Bahan ini cocok untuk menjadi penanggung beban robot atau sebagai roda, tersedia dalam bentuk lempengan dan batangan. Cocok untuk dijadiakn roda atau sprocket pada tank.
Manfaat Penelitian
Adapun manfaat yang dihasilkan dari penelitian ini adalah :
Metode Penelitian
Metode Pengumpulan Data
Metode Analisa
Pada metode ini penulis menganalisa terhadap kebutuhan sistem. bagaimana sensifitas, flexibilitas dan fungsi utama pada sistem kendali Robot Pembersih Panel Solar Cell mengunakan Mini PC Raspberry dengan komunikasi melalui WIFI. Pengumpulan data di dapat dengan melakukan wawancara dengan user atau study literature. Penulis menggali informasi sebanyak – banyaknya dari user sehingga akan tercipta sebuah sistem computer yang bisa melakukan tugas – tugas yang diinginkan oleh user. Tahapan ini akan menghasilkan dokumen user requirement atau bisa dikatakan sebagai data yang berhubungan dengan keinginan user dalam pembuatan sistem. Dokumen ini lah yang akan menjadi acuan sistem analisa untuk menerjemahkan kedalam bahasa pemograman.
Metode Perancangan
Merancang model atau prototype dengan berbagai bahan dasar dari beberapa komponen pendukung, instalasi software dan pemasangan komponen lain menjadi satu kesatuan. Dalam proses perancangan sangat penting untuk mengetahui berapa jumlah input dan output yang dibutuhkan pada prototype robot agar pada saat pemograman, input dan output yang tersedia sesuai dengan coding program yang dibuat. Proses perancangan suatu prototipe akan menerjemahkan syarat kebutuhan sebuah perancangan perangkat keras maupun perangkat lunak yang dapat diperkirakan sebelum proses pembuatan prototipe dan dalam proses pembuatan coding program.
Metode Prototipe
Agar User dapat menilai dari spesifikasi fungsional, bagaimana sistem berlaku atau bekerja maka dibutuhkannya metode prototipe. Jika perubahan diperlukan prototipe dapat dimodifikasi, memungkinkan dimodifikasi beberapa kali sampai keadaan yang ditetapkan user. Metode ini sering digunakan pada dunia rill. Karna metode ini secara keseluruhan akan mengacu kepada kepuasan User. Bisa dikatakan bahwa metode ini merupakan metode Waterfall yang dilakukan secara berulang – ulang.
Metode Testing
Tahapan ini yang merupakan tahapan secara nyata dalam mengerjakan suatu sistem. Setelah perangkat keras sudah menjadi satu kesatuan dan pengkodean selesai, maka akan dilakukan testing terhadap sistem yang telah dibuat sebelumnya. Tujuan testing menemukan kekurangan – kekurangan terhadap sistem tersebut dan kemudian bisa diperbaiki. Pada metode testing ini penulis menggunakan Metode Black Box pada sistem yang akan penulis bangun, dalam pengertianya Black Box adalah pengujian untuk mengetahui apakah semua fungsi dari perangkat keras maupun perangkat lunak telah berjalan semestinya sesuai dengan kebutuhan fungsional yang telah didefinisikan.
Metode Black Box memungkinkan perekayasaan perangkat lunak mendapatkan serangkaian kondisi input yang sepenuhnya mengunakan semua persyaratan fungsional untuk suatu program.
Black Box dapat menemukan kesalahan dalam kategori berikut :
Sistematika Penulisan
Penulisan skripsi ini terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub – sub bab yang akan membahas dan menguraikan masalah yang lebih terperinci. Secara garis besar isi dari bab – bab penulisan skripsi ini adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisi tentang uraian latar belakang, perumusan masalah, ruang lingkup penelitian, tujuan dan manfaat penelitian, metode penelitian dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini menjel Bab ini berisi tentang uraian mengenai teori umum, teori khusus dan spesifikasi komponen guna mendukung pembahasan masalah yang berkaitan dengan judul penelitian.
BAB III PERANCANGAN DAN PEMBAHASAN
Bab ini berisi tentang gambaran umum tentang prototipe Robot Pembersih Panel Solar Cell meliputi gambaran umum perusahaa, tata laksana sistem yang berjalan, analisa sistem yang berjalan, konfigurasi sistem yang berjalan, permasalahan yang dihadapi dan alternative pemecahan masalah, dan user requirement.
BAB IV UJI COBA DAN ANALISA
Bab ini penulis menguraikan sistem yang akan diusulkan seperti perancangan program, flowchart program, testing, evaluasi, implementasi dan estimasi biaya.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang berisi tentang kesimpulan dan saran dari hasil pengamatan dan penelitian dalam pembuatan prototipe robot pembersih panel solar cell.
BAB II
Teori Umum
Konsep Dasar Panel solar Cell
Solar panel atau solar module atau orang indonesia biasa menyebutnya panel surya adalah komponen terpenting dari Pembangkit Listrik Tenaga Surya (PLTS). Solar panel mengkonversi tenaga matahari menjadi listrik. Solar panel terdiri dari sejumlah photovoltaic adalah teknologi yang berfungsi untuk mengubah atau mengkonversi radiasi matahari menjadi energi listrik secara langsung. PV biasanya dikemas dalam sebuah unit yang disebut modul. Dalam sebuah modul surya terdiri dari banyak sel surya yang bisa disusun secara seri maupun paralel. Sedangkan yang dimaksud dengan surya adalah sebuah elemen semikonduktor yang dapat mengkonversi energi surya menjadi energi listrik atas dasar efek fotovoltaik. Solar cell mulai popular akhir-akhir ini, selain mulai menipisnya cadangan enegi fosil dan isu global warming. energi yang dihasilkan juga sangat murah karena sumber energy (matahari) bisa didapatkan secara gratis.
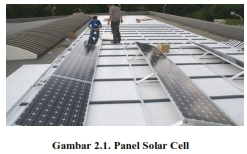
Sistem Kontrol
Menurut Budiharto (2008:159)[1], “sistem control dapat dibayangkan sebagai sebuah kotak hitam yang digunakan untuk mengontrol output untuk nilai tertentu atau urutan nilai tertentuseperti ilustrasi pada gambar 2.2 ”.
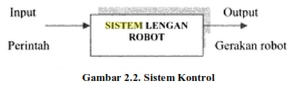
Menurut Bolton (2004:1)[2],"sistem control adalah suatu sistem yang mengontrol serangkaian kejadian atau mempertahankan agar sejumlah varibel tetap bernilai tetap atau melakukan suatu perubahan yang telah ditetapkan sebelumnya".
Berdasarkan definisi tersebut dapat disimpulan sistem control adalah sebuah sisitem yang terdiri dari input proses dan output proses yang dapat dikontrol. Dalam aplikasinya, sistem kontrol memegang peranan penting dalam teknologi. Sebagai contoh, otomatisasi industri dapat menekan biaya produksi, mempertinggi kualitas, dan dapat menggantikan pekerjaan-pekerjaan rutin yang membosankan. Sehingga dengan demikian akan meningkatkan kinerja suatu sistem secara keseluruhan, dan pada akhirnya memberikan keuntungan bagi manusia yang menerapkannya.
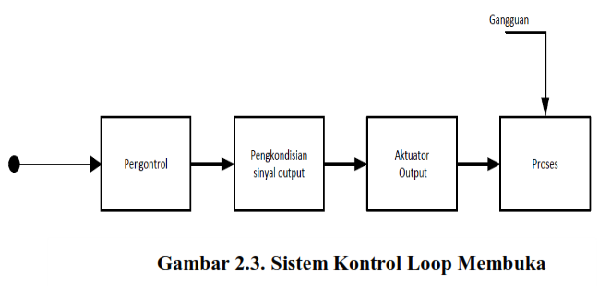
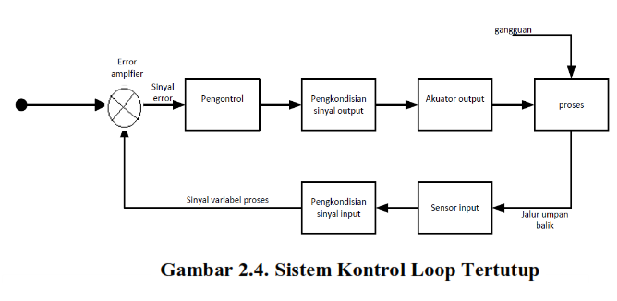
Menurut Petruzella dalam Drs.Sumanto.MA (2001:563)[3],sistem kontrol dapat diklasifikasikan sebagai loop membuka dan loop tertutup.
Pengontrolan tidak menerima sistem informasi berkaitan status sekarang dari proses atau keperluan untuk setiap aksi pembetulan. Gambar 2.3 melukiskan sistem control loop membuka.
Sistem pada output proses yang mempengaruhi input. Sistem tersebut mengukur output yang sesungguhnya dari proses dan membandingkannya dengan output yang dikehendaki. Gambar 2.4 melukiskan sistem control loop tertutup.
Konsep Dasar Pengontrolan Jarak Jauh
Pengontrolan jarak jauh dapat diartikan sebagai sistem yang mampu melakukan proses kontrol atau kendali terhadap suatu piranti yaitu mampu untuk mengaktifkan dan menonaktifkan piranti tersebut serta dapat mengetahui kondisi sebenarnya dari piranti tersebut. Maka dapat disimpulkan ada status dari setiap piranti yang dipantau setelah dikirimkannya suatu perintah atau intruksi. Pengontrolan terhadap suatu piranti dapat dilakukan dari jarak dekat yaitu dengan mengaktifkan dan menonaktifkannya secara manual dan juga dapat dilakukan dari jarak jauh dengan menggunakan remote control maupun dengan menggunakan suatu perangkat lunak yang mampu mengontrol alat – alat elektronik dengan berbagai macam gerak dengan sistem kerja yang kompleks.
Kebutuhan akan sistem kendali jarak jauh semangkin meningkat sejalan dengan era globalisasi. Rutinitas perkerjaan manusia yang dituntut semakin cepat dan efisien membutuhkan suatu sistem pengontrolan jarak jauh yang dapat mengontrol piranti dari mana saja. Suatu sistem jaringan computer merupakan solusi untuk menghubungkan antara pengontrol dengan piranti yang di control. Konsep lan nirkabel (WiFi) digunakan sebagai mode untuk menghubungkan antara dua buah computer atau lebih. komputer server menggunakan sebuah mini PC Raspberry Pi sebagai computer control yang dapat mengontrol piranti dengan menggunakan program pengontrolan, dengan bantuan jaringan nirkabel (WiFi) raspberry Pi dapat melakukan pengontrolan dari jarak jauh.
Konsep Dasar Sistem Robotika
Perkembangan robotika pada awalnya bukan dari disiplin elektronika melainkan berasal dari ilmuwan biologi dan pengarang cerita novel maupun pertunjukan drama pada sekitar abad XVIII. Kata robot pertama kali diperkenalkan oleh seorang penulis dari Czech yang bernama wright Karel Capek pada tahun 1921. Kata Robot berasal dari kata ‘robota’ yang berarti: pekerja Paksa atau Sendiri.
Menurut Halim.St(2007:1)[4], “Robot adalah peralatan elektro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan otonomi maupun berdasarkan gerakan yang diperintahkan”.
Menurut Budiharto (2009:2)[5], “Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu ( kecerdasan buatan )”.
Berdasarkan beberapa definisi tersebut dapat disimpulkan bahwa robot adalah suatu suatu alat yang bergerak secara otomatis yang di dalamnya sudah tertanam seatu embedded system.
Menurut Halim.St(2007:5)[4],“Robot berdasarkan mobilitasnya terbagi dalam dua kelompok. Kelompok yang pertama merupakan robot yang dioperasikan pada lingkungan yang tetap dengan pergerakan yang cenderung tetap dan tertentu (sebagai robot industry/stationary robot). Pada kelompok yang kedua, robot dapat bergerak secara otonomi, memiliki navigasi, dan pergerakannya tidak tetap. Tergantung dari medan jelajah( dikenal dengan mobile robot)”.
Disain mobile robot dapat bergerak menggunakan kaki (leg robot), roda (wheel robot), dan tank. Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan tolong" (search and rescue), dan untuk pencarian tambang. Robot yang menggunakan peralatan komunikasi dimungkinkan untuk dikendalikan oleh manusia, seperti lengan robot yang pengendaliannya dilakukan melalui computer.
Menurut Halim.St(2007:6)[4],berdasarkan dari sisitem gerak robot dapat dikatagorikan sebagai berikut:
selain dari sistem pergerakan hal yang tidak kalah penting adalah dalam pemilihan material karna cukup berpengaruh terhadap kontruksi robot seperti berat, kekuatan, serta ketahanan terhadap keretakan. Material yang dapat digunakan antarlain plastic, logam, dan kayu. Padukanlah material yang ada, cari kontruksi robot yang kuat, ringan serta dapat meredam getaran. Berikut ini adalah material yang dapat digunakan untuk membuat suatu robot.
Epoxies, sifatnya tahan lama, terang ,biasa digunakan sebagai perekat pada fiberglass, wujudnya berupa cairan (lem), pada bentuk padat dapat dipotong dan dilubangi.
Phenolics, merupakan bahan asli material plastic, tidak mudah retak, berwarna hitam atau coklat muda, mudah dipotong dan dilubangi, contoh dari produk ini adalah papan elektronik/Printed Circuit Board (PCB).
Polyvinyl chloride (PVC), bersih, tidak mudah retak, mudah dipotong – potong atau di lubangi, tersedia dalam bentuk pipa, mur, baut, batangan, lembaran, dan film. Cocok untuk digunakan untuk base robot.
Material kayu yang dapat digunakan sebagai material kontruksi robot antara lain :
Material logam juga digunakan untuk pembuatan kontruksi robot seperti besi, besi karbonit, alumunium, stainless steel. Material besi kokoh, dapat dipotong, dibentuk, dilubangi secara presisi dan dapat berkarat pada suhu yang lembab. Karbonit memiliki struktur kekerasan yang lebih kuat dari pada besi biasa. Alumunium merupakan material logam yang ringan namun kuat, dapat dibentuk, dipotong dan dilubangi. Material stainless steel memiliki struktur yang keras, dapat dibentuk maupun dilubangi dan tahan terhadap karat. Material logam dapat digunakan untuk roda, dudukan motor DC, atau sebagai kopling antara motor dengan roda.
Konsep Dasar Prototipe======Konsep Dasar Jaringan======Konsep Dasar Internet Protokol
Access Point======Konsep Dasar DHCP======Flowchart
Data Flow Diagram======Metode Black Box======Metode White Box======Konsep Dasar Elisitasi
Teori Khusus
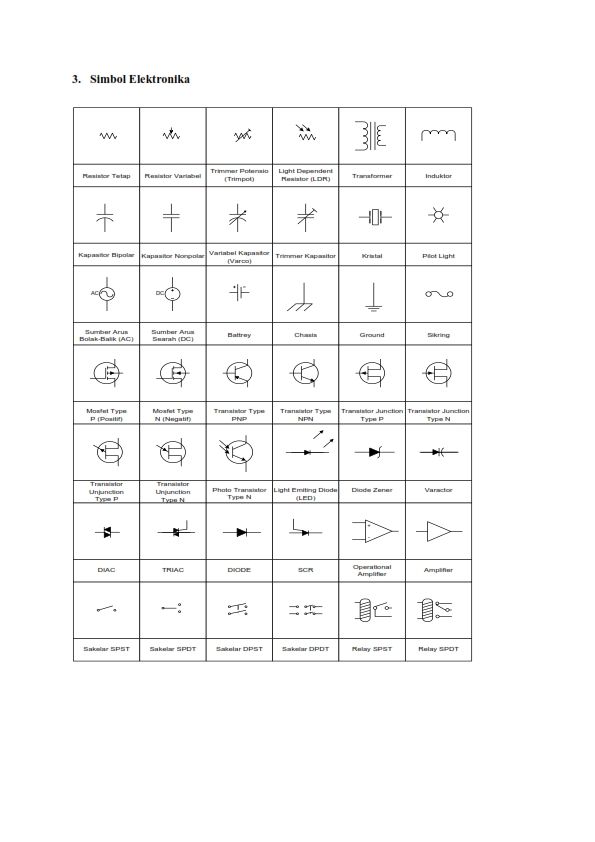
Mikroprosesor ARM======Arsitektur CISC dan RISC======Konsep Dasar Raspberry Pi======Pin GPIO Raspberry Pi======Sistem operasi Raspberry P======Konsep Dasar Elektronika======Konsep Dasar Motor DC======Konsep Dasar Motor DC Driver======Konsep Dasar Sensor Kedekatan======Prinsip Kerja Relay======Konsep Dasar Adaptor======Webcam======Bahasa Pemograman Phyton ======Sistem Operasi Android======Basic4android======Literature Review
BAB III
Gambaran Umum Perusahaan
Sejarah Singkat Perusahaan
Perguruan Tinggi Raharja bermula dari sebuah lembaga kursus komputer yang bernama LPPK (Lembaga Pendidikan dan Penelitian Komputer) Raharja yang terletak di Jl. Gatot Subroto km.2 Harmoni Mas Cimone Tangerang.LPPK Raharja diresmikan pada tanggal 3 Januari 1994 oleh bapak walikota Tangerang Drs. H. Zakaria Mahmud, Raharja telah terdaftar pada Depdiknas Kotamadya Tangerang dengan nomor 201/PLSM/02.4/L.93. Lembaga inilah yang mempelopori penggunaan operating system windows dan aplikasinya diwilayah Tangerang dan sekitarnya, hal tersebut mendapat respon positif dan jumlah peminatnya pun meningkat pesat seiring dengan kerjasama yang di lakukan oleh lembaga ini dengan sekolah Lanjutan Tingkat Atas yang ada di Tangerang.
Karena semakin pesatnya perkembangan dan pertumbuhan akan komputerisasi dan meningkatnya peminat masyarakat Tangerang maka pada tanggal 24 Maret 1999 LPPK Raharja berkembang menjadi Akademi Manajemen Informatika dan Komputer (AMIK) Raharja Informatika yang diresmikan melalui surat keputusan Mentri Pendidikan dan Kebudayaan Republik Indonesia Nomor: 56/D/O/1999 yang diserahkan langsung dari Bapak Prof. Dr. Udju D. Rusdi selaku Koordinator KOPERTIS wilayah IV Jawa Barat kepada ketua yayasan Nirwana Nusantara Ibu Kasarina Sudjono. Pada tanggal 2 Februari 2000 dengan menyelenggarakan jurusan Manajemen Informatika.
Pada tanggal 2 Februari 2000 AMIK Raharja Informatika menjadi satu-satunya perguruan tinggi yang menjalankan studi formal untuk program Diploma I (DI) dengan memberikan gelar Ahli Pratama dan Program Diploma II (DII) dengan memberikan gelar Ahli Muda dan Diploma III (DIII) dengan memberikan gelar Ahli Madya kepada lulusannya, sesuai dengan surat keputusan Koordinator Perguruan Tinggi Swasta wilayah IV Jawa Barat dengan Nomor 3024/004/KL/1999.
Kemudian pada tanggal 7 September 2000 sesuai dengan surat keputusan Direktur Jendral Pendidikan Tinggi Departemen Pendidikan Nasional Nomor 354/Dikti/Kep/2000 menambah 2 program yakni D3 Teknik Informatika dan D3 Komputer Akuntasi.
Kini AMIK Raharja Informatika mempunyai 3 (tiga) program studi Diploma III dengan jurusan Manajemen Informatika (MI), Teknik Informatika (TI), dan Komputer Akuntansi (KA) yang masing-masing jurusan memberikan gelar Ahli Madya (A.md), Ahli Muda (AM), Ahli Pratama (AP) kepada lulusannya.
Pada tanggal 20 Oktober 2000 dalam usahanya untuk meningkatkan mutu dan kualitas dari pada lulusan AMIK RAHARJA INFORMATIKA meningkatkan statusnya dengan membuka Sekolah Tinggi Manajemen Informatika dan Komputer (STMIK) RAHARJA. Dengan surat keputusan Nomor 42/01/YNN/PR/II/200. ketua Yayasan Nirwana Nusantara mengajukan permohonan pendirian STMIK RAHARJA kepada Mendiknas KOPERTIS Wilayah IV jawa barat dengan 3 (tiga) program studi SI Jurusan Sistem Informasi (SI), Teknik Informatika(TI), dan Sistem Komputer (SK), hal tersebut telah mendapat tanggapan dari Direktur Jendral Pendidikan Tinggi dengan surat keputusan Nomor 5706/D/T/2000. Tidak hanya sampai disini, dalam rangka meningkatkan mutu dan kualitas lulusan RAHARJA sesuai dengan Rencana Induk Pengembangan (RIP) Raharja, bahwa dalam kurun waktu tidak lebih dari 5 tahun sudah berdiri Universitas RAHARJA.
Pada saat ini, Perguruan Tinggi Raharja pun telah meningkatkan mutu dan kualitasnya melalui sertifikat Akreditasi, diantaranya yaitu sebagai berikut:
- Pada tanggal 5 April 2006 dengan sertifikat Akreditasi Nomor 00117/Ak-1-DIII-03/DFXMEI/IV/2002 yang berisi Badan Akreditasi nasional Perguruan Tinggi menyatakan bahwa program studi Diploma III Manajemen Informatika di AMIK Raharja Informatika Terakreditasi A.
- Pada tanggal 4 Mei 2006 dengan Sertifikat Akreditasi Nomor 08479/Ak-X-SI-001/CAGTLF/V/2006 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa studi Strata 1 Teknik Informatika di STMIK Raharja terakreditasi B.
- Pada tanggal 11 Mei 2006 dengan Sertifikat Akreditasi Nomor 08523/Ak-X-S1-002/CAGSIM/V/2006 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Strata 1 Sistem Informasi di STMIK Raharja terakreditasi B.
- Pada tanggal 3 Agustus 2007 dengan Sertifikat Akreditasi Nomor 006/BAN-PT/AK-VIII/DPI-III/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma III Manajemen Informatika di AMIK Raharja Informatika terakreditasi B.
- Pada tanggal 25 Agustus 2007 dengan Sertifikat Akreditasi Nomor 019/BAN-PT/AK-X/SI/VIII/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program Strata 1 Sistem Komputer di STMIK Raharja terakreditasi B.
- Pada tanggal 29 Desember 2007 sesuai surat keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 017/BAN-PT/AK-VII/Dpl-III/XII/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma III Teknik Informatika di AMIK Raharja Informatika dengan terakreditasi B.
- Pada tanggal 18 Januari 2008 sesuai surat Keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 019/BAN-PT/AK-VII/Dpl-III/I/2008 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma Tiga Komputerisasi Akuntansi di AMIK Raharja Informatika terakreditasi A.
- Pada tanggal 08 Juli 2011 sesuai surat Keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 010/BAN-PT/Ak-XIV/S1/VII/2011, menyatakan bahwa Program Studi Sarjana Teknik Informatika, Sekolah Tinggi Manajemen Informatika dan Komputer Raharja, Tangerang terakreditasi B.
- Pada tanggal 23 September 2011 sesuai surat Keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 025/BAN-PT/Ak-XIV/S1/IX/2011, menyatakan bahwa Program Studi Sarjana Sistem Informasi, Sekolah Tinggi Manajemen Informatika dan Komputer Raharja, Tangerang terakreditasi B.
Struktur Organisasi Perguruan Tinggi Raharja
Tugas dan Tanggung Jawab
1. Presiden Direktur
Wewenang :
- Menyelenggarakan program kerja yang berpedoman pada visi, misi, fungsi dan tujuan pendirian Perguruan Tinggi Raharja.
- Menyelenggarakan kegiatan dan pengembangan pendidikan, penelitian serta pengabdian pada masyarakat.
- Menyelenggarakan kegiatan pengembangan administrasi.
- Menyelenggarakan kegiatan-kegiatan yang menunjang terwujudnya Tri Darma Perguruan Tinggi.
Tanggung Jawab :
- Pemimpin penyelenggaraan pendidikan, penelitian, pengabdian kepada masyarakat, membina tenaga edukatif, mahasiswa, tenaga administrasi dan terhadap lingkungan.
2. Direktur
Wewenang:
- Merupakan wakil presiden direktur.
- membantu presiden direktur dalam berbagai kegiatan.
3.Pembantu (Bidang Akademik)
Wewenang :
- Menjalankan program kebijaksanaan akademik.
- Mengawasi dan membina serta mengembangkan program studi sesuai kebijaksanaan yang telah digariskan.
- Membina dan mengembangkan kegiatan penelitian dan pengabdian pada masyarakat.
- Mengadakan afiliasi.
- Membina dan mengembangkan kelembagaan.
Tanggung Jawab :
- Membantu ketua dalam memimpin pelaksanaan pendidikan, penelitian dan pengabdian pada masyarakat.
4.Pembantu Direktur II (Administrasi)
Wewenang :
- Melaksanakan dan mengelola seluruh kegiatan administrasi dan keuangan.
- Membina dan mengembangkan kepegawaian.
- Mengadakan sarana dan prasarana kepegawaian.
Tanggung Jawab :
- Membantu ketua dalam pelaksanaan kegiatan dibidang keuangan dan administrasi.
5. Pembantu Direktur III (Bidang Kemahasiswaan)
Wewenang :
- Membina kegiatan kemahasiswaan.
- Membina kehidupan mahasiswa dalam kampus sehingga dapat mengembangkan penalaran.
- Membina dan mengawasi kegiatan lembaga mahasiswa serta unit kegiatan khusus akademik.
Tanggung Jawab :
- Membantu ketua dalam pelaksanaan kegiatan dibidang kemahasiswaan serta pelayanan kesejahteraan mahasiswa.
6.Asisten Direktur Akademik
Wewenang :
- Mengusulkan kepada Direktur atas prosedur pelaksanaan proses belajar mengajar.
- Mengusulkan kepada Direktur tentang kenaikan honor staff binaannya.
- Mengusulkan kepada Direktur tentang pengangkatan dan pemberhentian staff binaannya.
- Memberikan kebijakan pelaksanaan layanan pada bidangnya.
- Mengusulkan kepada Direktur tentang unit layanan baru yang dibutuhkan.
- Memberikan sanksi kepada staff binaannya yang melanggar tata tertib karyawan.
- Mengusulkan kepada Direktur tentang pengangkatan dan pemberhentian dosen.
Tanggung Jawab :
- Bertanggung jawab atas penyusunan JRS yang efektif dan efisien, pengimplementasian pelaksanaan proses belajar mengajar, kemajuan kualitas pelayanan akademik yang berkesinambungan, dan kelancaran proses belajar mengajar.
7. Kepala Jurusan
Wewenang:
- Mengusulkan kepada Assisten Direktur Akademik tentang perubahan mata kuliah dan materi kuliah yang dianggap telah kadaluarsa bahkan perubahan kurikulum jurusan.
- Mengusulkan kepada Asisten Direktur Akademik tentang kenaikan honor dosen binaannya.
- Mengusulkan kepada Asisten Direktur Akademik tentang pengadaan seminar, pelatihan, penambahan kelas perkuliahan pengangkatan dosen baru dan pemberhentian dosen.
- Memberikan kebijakan administratif Akademik seperti cuti kuliah, perpindahan jurusan, ujian susulan, dan pembukaan semester pendek.
- Mengusulkan kepada Asisten Direktur Akademik tentang pembukaan peminatan/konsentrasi baru dalam jurusannya.
- Memberikan sanksi Akademik kepada mahasiswa yang melanggar tata tertib Perguruan Tinggi Raharja.
Tanggung Jawab :
- Bertanggung jawab atas penyusunan dan pengimplementasian kurikulum, SAP dan bahan ajar, monitoring kehadiran dosen dalam perkuliahan, jam konsultasi dan tugas-tugas yang disampaikan ke dosen, terlaksananya penelitian, seminar, pembinaan prestasi akademik mahasiswa dan peningkatan jumlah mahasiswa dalam jurusannya.
8. Asisten Direktur Finansial
Wewenang:
- Mengusulkan kepada Direktur atas prosedur pembuatan budget pada setiap bagian dan pelaksanaan pemakaian dana.
- Mengusulkan kepada Direktur tentang kenaikan honor, pengangkatan dan pemberhentian staff binaannya.
- Memberikan kebijakan pelaksanaan layanan pada bidangnya dan sanksi kepada staff binaannya yang melanggar tata tertib karyawan.
Tanggung Jawab :
- Bertanggung jawab atas penyusunan budgeting pada setiap bagian, dan tersedianya dana atas budget yang telah disetujui.
- Bertanggung jawab atas kemajuan kualitas pendanaan aktifitas yang berkesinambungan.
- Bertanggung jawab atas kelancaran proses belajar mengajar.
9. Layanan Keuangan Mahasiswa(LKM)
Wewenang:
- Mengusulkan prosedur layanan keuangan kepada Asisten Direktur Finansial
- Mengusulkan tentang unit baru yang dibutuhkan kepada Asisiten Direktur Finansial.
Tanggung Jawab:
- Bertanggung jawab atas kelancaran proses penerimaan keuangan mahasiswa
- Bertanggung jawab atas penagihan tunggakan mahasiswa.
10. Asisten Direktur Operasional(ADO)
Wewenang :
- Mengusulkan kepada Direktur atas prosedur pelaksanaan pelayanan proses belajar mengajar
- Mengusulkan kepada Direktur tentang kenaikan honor staff binaannya.
- Mengusulkan kepada Direktur tentang pengangkatan dan pemberhentian staff binaannya.
- Memberikan kebijaksanaan pelaksanaan layanan pada bidangnya.
- Mengusulkan kepada Direktur tentang unit layanan baru yang dibutuhkan.
- Memberikan sanksi kepada staff binaannya yang melanggar tata tertib karyawan.
Tanggung Jawab :
- Bertanggung jawab atas penyusunan kalender akademik tahunan.
- Bertanggung jawab atas pengimplementasian pelaksanaan dan kualitas pelayanan yang berkesinambungan pada bidangnya.
- Bertanggung jawab atas kelancaran proses belajar mengajar.
11. Registrasi Perkuliahan dan Ujian(RPU)
Bagian registrasi perkuliahan dan ujian terdiri dari dua bagian antara lain:
A. Layanan Registrasi Mahasiswa (LRM)
Wewenang :
- Berwenang memberikan kebijakan yang berhubungan dengan proses registrasi mahasiswa.
- Memberikan kebijakan pelaksanaan layanan pada bidangnya
- Memberikan sanksi kepada staff binaannya yang melanggar tata tertib karyawan
- Mengusulkan kepada ADO untuk pengangkatan dan pemberhentian staff binaannya.
Tanggung Jawab:
- Bertanggung jawab atas pelaksanaan registrasi POM mulai dari persiapan hingga pada penutupan setiap semesternya.
- Bertanggung jawab atas pelaksanaan registrasi batal tambah dan jumlah mahasiswa yang melakukan POM.
- Bertanggung jawab atas seluruh informasi mengenai registrasi mahasiswa.
B. Perkuliahan dan Ujian (PU)
Wewenang :
- Mengusulkan kepada ADO atas prosedur pelaksanaan pelayanan proses belajar mengajar serta kebijakan yang diambil.
- Mengusulkan kepada ADO tentang pengangkatan dan pemberhentian staff binaannya.
- Memberikan sanksi kepada staff binaannya yang dianggap telah melanggar tata tertib karyawan.
- Mengusulkan kepada kepala jurusan untuk kelas perkuliahan yang dapat dibuka.
Tanggung Jawab :
- Bertanggung jawab atas pelaksanaan dan pendokumentasian perkuliahan dan ujian.
Tata Laksana Sistem Yang Berjalan
Prosedur Sistem Yang Berjalan
Rancangan Prosedur Sistem Berjalan
Analisa Sistem Yang Berjalan
Metode Analisa Sistem
Analisa Masukan, Analisa Proses, Analisa Keluaran
Konfigurasi Sistem Berjalan
Permasalahan yang dihadapi dan Alternatif Pemecahan Masalah
User Requirement
Elisitasi Tahap I
Elisitasi Tahap II
Elisitasi Tahap III
Final Draft Elisitasi
BAB IV
Rancangan Sistem Usulan
Prosedur Sistem Usulan
Use Case Diagram Sistem Yang Diusulkan
Activity Diagram Yang Diusulkan
Sequence Diagram Yang Diusulkan
Perbedaan Prosedur Antara Sistem Berjalan dan Sistem Usulan
Rancangan Basis Data
Normalisasi
Spesifikasi Basis Data
Flowchart System yang diusulkan
Rancangan Program
Rancangan Prototipe
Konfigurasi Sistem Usulan
Spesifikasi Hardware
Aplikasi Yang Digunakan
Hak Akses
Testing
Evaluasi
Implementasi
Schedule
Penerapan
Estimasi Biaya
BAB V
Kesimpulan
Kesimpulan Terhadap Rumusan Masalah
Ini isi dari kesimpulan terhadap rumusan masalah
Ini isi dari kesimpulan terhadap rumusan masalah
Ini isi dari kesimpulan terhadap rumusan masalah
Kesimpulan Terhadap Tujuan dan Manfaat Penelitian
Ini isi dari kesimpulan terhadap tujuan dan manfaat penelitian
Ini isi dari kesimpulan terhadap tujuan dan manfaat penelitian
Ini isi dari kesimpulan terhadap tujuan dan manfaat penelitian
Kesimpulan terhadap metode penelitian
Ini isi dari kesimpulan terhadap metode penelitian
Ini isi dari kesimpulan terhadap metode penelitian
Ini isi dari kesimpulan terhadap metode penelitian
Saran
Ini berisi saran anda
Kesan
DAFTAR PUSTAKA
- ↑ Budiharto,159. Membuat Sendiri Robot Cerdas Edisi Revisi. Jakarta: Elex Media Komputindo.
- ↑ Bolton,1. Programmable Logic Control (PLC. Jakarta : Erlangga.
- ↑ Petruzella dalam Drs.Sumanto.MA . 2001.Elektronik Industri. Yogyakarta: CV. Andi Offset.
- ↑ 4,0 4,1 4,2 Halim.St,1. Merancang Mobile Robot Pembawa Objeck. Jakarta: Elex Media Komputindo.
- ↑ Budiharto,2. Membuat Sendiri Robot Humanoid. Jakarta: Elex Media Komputindo.