SI 0831461581
PEMANFAATAN RASPBERRY PI SEBAGAI ROBOT PEMBERSIH
PANEL SOLAR CELL MENGGUNAKAN MEDIA WIFI PADA
PT LANGGENG BAJA PRATAMA

Disusun Oleh :
NIM |
: 0831461581
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2014/2015
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PEMANFAATAN RASPBERRY PI SEBAGAI ROBOT PEMBERSIH PANEL SOLAR CELL
MENGGUNAKAN MEDIA WIFI
PADA PT. LANGGENG BAJA PRATAMA
Dibuat Oleh :
NIM |
: 0831461581
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2014/2015
Disetujui Penguji :
Tangerang, ... Februari 2015
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
ABSTRAKSI
Pembangkit listrik tenaga surya adalah pembangkit yang memanfaatkan sinar matahari sebagai sumber penghasil listrik. Alat utama untuk menangkap, perubah dan penghasil listrik adalah photovoltaic yang disebut secara umum panel surya. Energi cahaya matahari akan di serap oleh panel surya, jika dalam keadaan kotor maka daya serap energi cahaya akan berkurang berdasarka hal tersebut, diciptakannya suatu robot yang dapat membersihkan panel surya secara automatis dan dapat di kendalikan dari jarak jauh.
Untuk pengontrolan sistem pembersih panel solar cell tersebut menggunakan Raspberry Pi dan sebagai antar muka menggunakan perangkat android dengan memanfaatkan komunikasi WiFi. Robot pembersih penel surya ini merupakan penelitian awal yang dapat dikembangkan lebih jauh lagi, seperti ketersediaan access internet, sehingga dalam segi pengontrolan jarak jauh sudah tidak ada batasan lagi.
Kata Kunci: Panel Solar Cell, Raspberry Pi, WiFi
ABSTRACT
Solar power plant is a plant that uses sunlight as a source of electricity .The primary tool to capture , change and generating electricity is called the photovoltaic solar panels in general . Solar light energy will be absorbed by the solar panels , if the dirty state of the absorption of light energy will be reduced based upon this, the creation of a robot that can clean the solar panels automatically and can be controlled remotely .
Cleaning system for controlling the solar cell panel using the Raspberry Pi and as an interface using android device by utilizing WiFi communication . Robot cleaners solar penel this is a preliminary study can be further developed , such as the availability of the internet accesse , so in terms of remote control is no longer limit.
Keywords: Solar Cell Panel, Raspberry Pi, WiFi
Puji syukur alhamdulillah, penulis panjatkan kehadirat Allah SWT yang telah memberikan seribu jalan, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Skripsi Penulis dapat berjalan dengan baik dan selesai dengan semestinya.
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, penulis mengambil data berdasarkan hasil observasi, wawancara, survey serta studi pustaka yang mendukung penulisan ini.
Hati kecil ini pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan laporan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan yang singkat ini, izinkanlah penulis menyampaikan selaksa pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I. selaku Presiden Direktur Perguruan Tinggi Raharja.
- Bapak Drs. PO. Abas Sunarya, M.Si selaku Direktur Perguruan Tinggi Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd. selaku Kepala Jurusan Sistem Komputer Perguruan Tinggi Raharja.
- Bapak Sudaryono, Dr.,Ir.,MPd selaku Dosen Pembimbing I Perguruan Tinggi Raharja yang telah berkenan memberikan bimbingan dan pengarahan kepada penulis.
- Bapak Indrianto., M.T selaku Dosen Pembimbing II Perguruan Tinggi Raharja yang telah berkenan memberikan bimbingan dan pengarahan kepada penulis.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kedua orang tua, yang telah memberikan dukungan, baik moril, materil maupun doa untuk keberhasilan kepada penulis.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari kesempurnaan. Oleh karena itu kritik dan saran yang membangun, penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, 27 Januari 2015 | |
| MOHAMAD RIZKI FAISAL | |
| NIM. 0831461581 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 Teori Umum
- 2.1.1 Konsep Dasar Panel solar Cell
- 2.1.2 Sistem Kontrol
- 2.1.3 Konsep Dasar Pengontrolan Jarak Jauh
- 2.1.4 Konsep Dasar Sistem Robotika
- 2.1.5 Konsep Dasar Prototipe
- 2.1.6 Konsep Dasar Jaringan
- 2.1.7 Konsep Dasar Internet Protokol
- 2.1.8 Access Point
- 2.1.9 Konsep Dasar DHCP
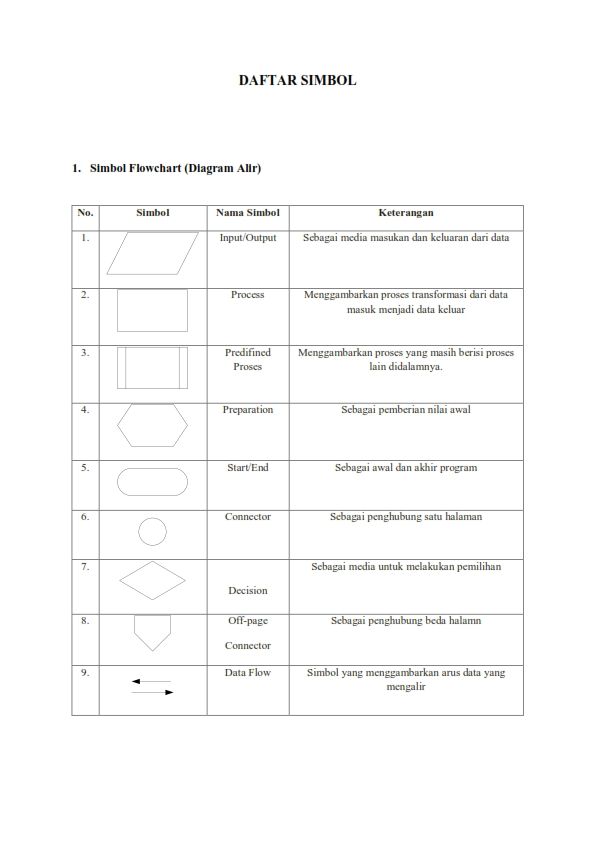
- 2.1.10 Flowchart
- 2.1.11 Data Flow Diagram
- 2.1.12 Metode Black Box
- 2.1.13 Metode White Box
- 2.1.14 Konsep Dasar Elisitasi
- 2.2 Teori Khusus
- 2.2.1 Mikroprosesor ARM
- 2.2.2 Arsitektur CISC dan RISC
- 2.2.3 Konsep Dasar Raspberry Pi
- 2.2.4 Pin GPIO Raspberry Pi
- 2.2.5 Sistem operasi Raspberry Pi
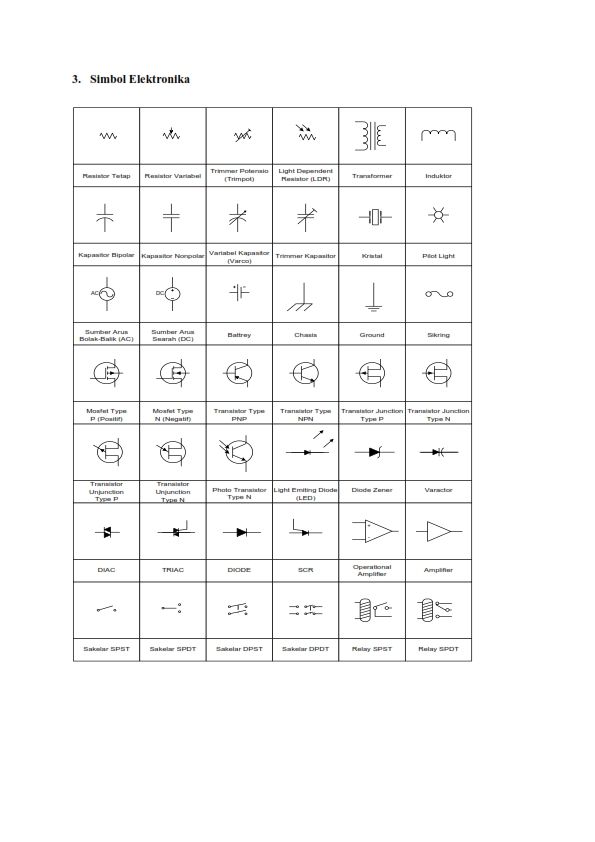
- 2.2.6 Konsep Dasar Elektronika
- 2.2.7 Konsep Dasar Motor DC
- 2.2.8 Konsep Dasar Motor DC Driver
- 2.2.9 Konsep Dasar Sensor Kedekatan
- 2.2.10 Prinsip Kerja Relay
- 2.2.11 Konsep Dasar Adaptor
- 2.2.12 Regulator Step - Down
- 2.2.13 Webcam
- 2.2.14 Bahasa Pemograman Phyton
- 2.2.15 Sistem Operasi Android
- 2.2.16 Basic4android
- 2.2.17 Literature Review
- 2.1 Teori Umum
- 3 BAB III
- 4 BAB IV
- 5 BAB V
- 6 DAFTAR PUSTAKA
- 7 DAFTAR LAMPIRAN
DAFTAR TABEL
DAFTAR GAMBAR
BAB I
Latar Belakang
Teknologi mengalami suatu kemajuan yangsangat pesat pada masa sekarang ini. Teknologi yang canggih telah mengantikanperalatan – peralatan manual yang membutuhkan banyak tenaga manusia untukpengoperasiannya. Salah satunya penggunaan robot . perkembangan teknologirobotika telah membuat kualitas kehidupan manusia semakin tinggi. Pada saat iniperkembangan teknologi robotika telah mampu meningkatkan kualitas dan kuantitasproduksi berbagai pabrik. Teknologi robotika juga sudah menjangkau sisihiburan, pendidikan dan, sebagai alat bantu pekerjaan manusia sehari – hari,sebagai contoh robot pembersih panel solar cell, yang membantu membersihkanpanel solar cell secara otomatis. Salah satu cara menambahkan tingkat kecerdasansebuah robot dengan menabahkan sensor pada robot.
.Tentu telah kita ketahui sumber tenagalistrik bukan hanya berasal dari bahan bakar minyak bumi saja, namun sudah berbagai macam caramendapatkan sumber tenaga listrik salah satunya adalah Pembangkit Listrik TenagaSurya (PLTS), pembangkit yang memanfaatkan sinar matahari sebagai sumberpenghasil listrik. Solar panel terdiri dari sejumlah sel silkon disebut jugasolar cell PV yang disinari matahari, yang lalu menghasilkan proton yangmembangkitkan arus listrik. Sekumpulan solar panel dalam satu sistem disebutarray. Banyaknya jumlah modul yang dapat disusun secara seri atau parallel akanmenentukan besarnya total output energi listrik yang dihasilkan.
Dari penjelasan diatas begitu utamanya panel solar cell sebagai salah satu komponen pembangkit listrik tenaga surya (PLTS). Tentunya dengan hal tersebut perlu adanya perawatan yang rutin dalam pemeliharaannya, karna jika panel solar cell dalam keadaan kotor atau berdebu berakibat berkurangnya daya serap panel solar cell untuk menyerap energi cahaya matahari. Untuk itu dibutuhkan suatu robot yang dapat bekerja secara otomatis sehingga memudahkan pekerjaan manusia dalam membersihkan panel solar cell.
Dalam pembuatan robot pembersih panel solar cell ini membutuhkan beberapa Motor DC sebagai penggerak robot dan Motor pump untuk memompa air. Untuk segi komunikasinya menggunakan media WIFI dan dapat dikontrol menggunakan perangkat gadget. Robot ini dirancang untuk membersihkan panel solar cell yang memiliki permukaan miring, robot ini dilengkapi empat roda dua diantaranya sebagai roda penggerak yang terhubung dengan Motor DC dan untuk alat pembersihnya dilengkapi sebuah wiper yang biasanya dipergunakan untuk pembersik kaca mobil dan sebuah motor pump untuk memompa air. Robot ini juga dilengkapi dua buah sensor jarak untuk mengatur pergerakan robot. Komponen yang tak kalah pentingnya adalah Raspberry Pi sebagai kendali utama robot, sehingga sistem gerak dari robot ini menjadi otomatis sesuai dengan program yang telah dibuat sebelumnya. Untuk komunikasinya Raspberry Pi dilengkapi WIFI untuk komunikasi dengan gadget.
Berdasaran permasalahan analisa yang ada, sehingga penulis mengambil judul "Pemanfaatan Raspberry Pi Sebagai Robot Pembersih Panel Solar Cell Menggunakan Media WIFI Pada PT. Langgeng Baja Pratama".
Rumusan Masalah
Berikut ini adalah beberapa perumusan masalah pada perancangan pemanfaatan Mini PC Raspberry Pi sebagai robot pembersih panel solar cell menggunakan media WIFI :
- Bagaimana membuat Robot Pembersih Panel Solar Cell dapat melakukan control otomatis ?
- Bagaimana cara Robot Pembersih Panel Solar Cell dapat berkomunikasi dengan gadget ?
- Komponen dan applikasi apa saja yang dibutuhkan, agar Robot Pembersih Panel Solar Cell dapat bekerja sesuai program yang dibuat sebelumnya ?
Ruang Lingkup Penelitian
Sebagai pembatasan pembahasan atas penyusunan laporan ini untuk tetap focus dan sesuai dengan tujuan yang ditetapkan, maka penulis memberikan ruang lingkup penelitian sebagai berikut :
- Sistem pengontrolan pembersih Panel Solar Cell menggunakan penggerak motor DC, dengan pergerakan Forward – Reverse
- Mengendalikan perangkat dengan menggunakan Mini PC Raspberry Pi.
- Komunikasi antara Mini PC Raspberry Pi dengan gadget menggunakan WIFI pada jaringan LAN (local area network).
- Untuk alat kelengkapan pembersih menggunakan wiper mobil dan motor micro pump.
- Untuk sistem sensor Robot Pembersih Panel Solar Cell dilengkapi dua buah sensor proximity.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Tujuan dari penelitian yang dilakukan adalah sebagai berikut :
- Tujuan Indifidual
- Penelitian ini dilaksanakan dengan tujuan untuk memenuhi persyaratan kelulusan skripsi.
- Merancang Robot Pembersih Panel Solar Cell menggunakan Mini PC Raspberry Pi.
- Meningkatkan kemampuan meniliti mandiri.
- Tujuan Fungsional
- Memperkenalkan konsep Automatic controlling berbasis Raspberry pi kepada dunia pendidikan, masyarakat akademis, dan industri dalam bentuk model dan prototipe.
- Untuk membantu mempermudah perawatan panel solar cell, agar pembangkit listrik tenaga surya dapat bekerja secara optimal.
- Tujuan Operasional
- Menerapkan ilmu secara terpadu dan terperinci sehingga berguna bagi perkembangan teknologi khususnya di lingkungan akademis.
- Sebagai tolak ukur kemampuan diri yang didapat selama menjalani pendidikan.
- Manfaat Individual
- Dapat memahami sistem kendali berbasis Raspberry Pi.
- Dapat memahami sistem jaringan.
- Dapat memahami tentang rangkain elektronika dan sistem sensor.
- Dapat membuat aplikasi maupun sistem kendali automatis berbasis Raspberry Pi.
- Manfaat Fungsional
- Dalam membersihkan panel solar cell jauh lebih ringan, dan juga dapat di control dari jarak jauh mengunakan media wifi.
- Dapat mempersingkat waktu dalam mempersihkan Panel Solar Cell.
- Manfaat Operasional :
- Dapat menekan biaya operasional, karena tidak perlu membayar orang untuk membersihkan panel solar cell.
- Observasi
Penting bagi penulis melakukan observasi untuk mengetahui jumlah kebutuhan input dan output suatu robot agar dapat bekerja secara otomatis.Melalui pengamatan dan pengalaman yang didapat penulis, menyimpulkan bahwa dibutuhkannya suatu alat pembersih panel solar cell yang efisien dan efektif, sehingga kinerja energi listrik tenaga surya dapat bekerja secara maksimal.
- Studi Pustaka
Mengumpulkan data dengan mencatat atau membaca dari buku-buku yang berguna dengan pokok permasalahan ataupun referensi lain. Sebagian besar metode diambil dari situs – situs internet, dan sisanya dari buku cetak. Penulis melakukan pengumpulan data dengan cara browsing, membaca beberapa bagian dari buku-buku referensi internet dan materi-materi perkuliahan yang berhubungan dengan sistem control jarak jauh berbasis raspberry. Sehingga diperoleh gambaran dari prinsip kerja suatu sistem control jarak jauh berbasis Raspberry Pi yang dapat penulis gunakan sebagai landasan pemahaman dalam perancangan dan pengerjaan prototipe robot pembersih panel solar cell menggunakan media WIFI.
- Fungsi – fungsi yang tidak benar atau hilang.
- Kesalahan interface.
- Kesalahan dalam struktur data atau akses basis data eksternal.
- Inisialisasi dan kesalahan terminasi.
- Validitas fungsional.
- Kesensitifan sistem terhadap nilai input tertentu.
- Batasan dari suatu data.
- Definisi Sistem Kontrol
- Klasifikasi Sistem Kontrol
- Sistem Kontrol Loop membuka
- Sistem Kontrol Loop Tertutup
- Sistem gerak robot berkaki
Sistem gerak robot berkaki memiliki keunikaan, yaitu meniru sistem gerak pada manusia (bi-pedal) maupun pada binatang (berkaki empat/quadrapod, berkaki enam/hexapod, berkaki banyak multipod). Semakin banyak kaki yang digunakan pada robot, diharapkan semakin seimbang robot tersebut pada saat berjalan. Robot berkaki merupakan robot yang cukup kompleks dalam perancangan dan pembuatanny, karna perlu mempertimbangkan beberapa factor diantaranya keseimbangan dan kecepatan - Sistem gerak robot stationary
Robot stationary biasanya berwujud manipulator lengan yang menyerupai fungsi dari lengan manusia. Jenis pola gerak lengan robot antara lain polar coordinate, cylindrical coordinate, Cartesian coordinate dan revolute coordinate. - Holonomic Drive
Holonomic drive adalah sistem gerak yang memungkinkan robot bergerak segala arah (dengan penggunaan roda omni-directional). Konfigurasi ini memungkinkan gerak rotasi dan transisi pada mobile robot. - Sistem Gerak Tank
Sistem gerak tank merupakan kombinasi dari tiga bagian yaitu drive sprocket, idler sprocket, dan track. Drive sprocket adalah sprocket yang menghubungkan langsung dengan motor, idler sprocket adalah sprocket yang membantu pergerakan track . track adalah bagian yang menghubungkan idler sprocket dengan derive sprocket serta mempunyai kontak langsung terhadap permukaan lantai yang di lalui. - Plastik
Material plastik dapat digunakan sebagai material kontruksi robot antara lain : - Acrylic atau polymethyl methacrylate (PMMA), sifatnya jernih, kuat, rentan terhadap keretakan akibat tekanan, mudah tergores, tersedia dalam bentuk lempengan dan batangan, cocok sebagai hiasan, atau sebagai tempat peletakan modul – modul robot.
- Nylon atau polyamide, memiliki karakter yang kuat, tidak mudah retak. Bahan ini cocok untuk menjadi penanggung beban robot atau sebagai roda, tersedia dalam bentuk lempengan dan batangan. Cocok untuk dijadiakn roda atau sprocket pada tank.
- Epoxies, sifatnya tahan lama, terang ,biasa digunakan sebagai perekat pada fiberglass, wujudnya berupa cairan (lem), pada bentuk padat dapat dipotong dan dilubangi.
- Phenolics, merupakan bahan asli material plastic, tidak mudah retak, berwarna hitam atau coklat muda, mudah dipotong dan dilubangi, contoh dari produk ini adalah papan elektronik/Printed Circuit Board (PCB).
- Polyvinyl chloride (PVC), bersih, tidak mudah retak, mudah dipotong – potong atau di lubangi, tersedia dalam bentuk pipa, mur, baut, batangan, lembaran, dan film. Cocok untuk digunakan untuk base robot.
- Kayu
Material kayu yang dapat digunakan sebagai material kontruksi robot antara lain : - Plywood, material ini berasal dari lembaran kayu tipis yang disatukan. Semakin banyak lembaran kayu yang disatukan. Plywood menjadi lebih kokoh. Material ini bisa digunakan sebagai base robot.
- Balsa, tipis, ringan, kuat. Tersedia berbagai ukuran, mudah dibentuk, maupun meredam getaran.
- Logam
- Mengumpulkan dan menganalisis kebutuhan.
- Melakukan perancangan cepat.
- Membangun sebuah prototipe.
- Evaluasi dilakukan oleh konsumen atas prototipe.
- Perubahan rancangan dan prototipe.
- Apabila pelanggan kecewa dengan prototipe yang telah dibangun, ulangi langkah 5.
- Apabila pelanggan puas terhadap prototipe yang telah dibangun, pengembangan produk bersekala besar dapat dimulai.
- Rapid Throwaway prototyping
Pendekatan pengembangan perangkat keras dan lunak ini dipopulerkan oleh Gomma dan Scoot (1981) yang saat ini telah digunakan secara luas oleh industry, terutama didalam pengembangan aplikasi. Pendekatan ini biasanya digunakan dengan item yang beresiko tinggi (high-risk) atau dengan bagian dari sistem yang tidak dimengerti secara keseluruhan oleh para tim pengembang. Pada pendekatan ini “prototipe quick and dirty” dibangun, diverifikasi oleh konsumen dan dibuang hingga prototipe yang diinginkan tercapai pada saat proyek bersekala besar dimulia. - Prototype Evolusioner
Pada pendekatan evolusioner, suatu prototipe dibangun berdasarkan pada kebutuhan dan pemahaman secara umum. Prototipe kemudian diubah dan dievolusikan dari pada dibuang. - Model Spiral
Model ini dititik beratkan pada pembuatan prototipe dan manajemen resikoyang sangan fleksibel. Dasar – dasar konsep ini adalah setiap bagian produk dan setiap tingkat melibatkan urutan yang sama pada setiap langkah atau siklus. - Model Proses Pengembangan Iteratif
Pendekatan Iterative Enhancement (IE) (Brasili dan Turner, 1975) atau Iterative Development Process (IDP) telah ditetapkan untuk dimulai dengan subnet kebutuhan dan pengembangan sebuah subnet dari produk yang memuaskan kebutuhan utama pelanggan, menyediakan alat untuk analisis dan pelatihan untuk pelanggan dan memberikan pengalaman untuk pengembang. Berdasarkan pada analisis tiap – tiap produk, perancangan dan kebutuhan dimodifikasi terus – menerus melalui serangkaian iterasi untuk menyediakan sebuah sistem kepada pengguna yang mengevolusi kebutuhan pelanggan dengan rancangan yang telah dikembangkan berdasarkan umpan balik (feedback) dan pembelanjaran (learning). - Gaya pembuatan prototipe
Pembahasan gaya pembuatan prototipe mengidentifikasi berbagai pendekatan yaitu Throwaway, Prototype Evolusioner dan Iteratif. - Target pembuatan prototipe
Contoh target dari metode pembuatan prototipe mungkin dibutuhkan, seperti perancangan arsitektur atau antar muka pengguna. - Teknik teknik evaluasi pembuatan prototipe
Pembahasan meliputi tatacara dengan hasil latihan prototipe yang digunakan. - User dapat mempertimbangkan sedikit perubahan selama masih bentuk prototipe.
- Memberikan hasil yang lebih akurat dari pada perkiraan sebelumnya, karena fungsi yang diinginkan dan kerumitannya sudah dapat diketahui dengan baik.
- User merasa puas. Pertama, user dapat mengenal melalui komputer. Dengan melakukan prototipe (dengan analisis yang sudah ada), user belajar mengenai komputer dan aplikasi yang akan dibuatkan untuknya. Kedua, user terlibat langsung dari awal dan memotivasi semangat untuk mendukung analisis selama proyek berlangsung.
- User kadang tidak melihat atau menyadari bahwa perangkat lunak yang ada belum mencantumkan kualitas perangkat lunak dan perangkat keras secara keseluruhan dan juga belum memikirkan kemampuan pemeliharaan untuk jangka waktu lama.
- Pengembangan biasanya ingin cepat menyelesaikan proyek. Sehingga menggunakan algoritma dan bahasa pemograman yang sederhana untuk membuat prototipe lebih cepat selesai tanpa memikirkan lebih lanjut bahwa program tersebut hanya merupakan cetak biru sistem.
- Hubungan user dengan computer yang disediakan mungkin tidak mencerminkan teknik perancangan yang baik.
- Berdasarkan Area.
- LAN
Local Area Network adalah jaringan lokal yang dibuat pada area tertutup. LAN biasa digunakan untuk jaringan kecil yang menggunakan resource bersama – sama, seperti penggunaan printer secara bersamaan, penggunaan media penyimpanan secara bersamaan. Kebanyakan LAN berbasis pada teknologi IEEE 802.3 Ethernet menggunakan perangkat switch, yang mempunyai kecepatan transfer data 10, 100, atau 1000 Mbps. Saat ini teknologi 802.11b (wifi) juga sering digunakan untuk membentuk LAN. Lokasi yang menyediakankoneksi LAN dengan teknologi wifi biasa disebut hotspot. - MAN
Metropolitan Area Network menggunakan metode yang sama dengan LAN namun daerah cakupannya lebih luas. Dapat dikatakan MAN merupakan pengembangan dari LAN. - WAN
ide Area Network cakupannya lebih luas dari pada MAN. Cakupan WAN meliputi satu kawasan, satu Negara, satu pulau, bahkan satu benua. Metode yang digunakan WAN hampir sama dengan LAN dan MAN. - Internet
Internet adalah interkoneksi jaringan – jaringan computer yang ada di dunia. Sehingga cakupannya sudah mencapai satu planet. Koneksi antar jaringan komputer dapat dilakukan berkat dukungan protokol yang khas, yaitu Internet Protokol (IP). - Berdasarkan Media Penghantar.
- WireNetwork
Wire Network adalah jaringan komputer menggunakan kabel sebagai media penghantar. Jadi, data mengalir pada kabel. Kabel yang umum digunakan pada jaringan komputer bisanya menggunakan bahan dasar tembaga. Ada juga jenis kabel lain yang menggunakan bahan sejenis fiber optis atau serat optic. Biasanya bahan tembaga banyak digunakan pada LAN. Sedangkan untuk MAN atau WAN menggunakan gabungan kabel tembaga dan serat optik. - Wireless Network
Wireless Network adalah jaringan tanpa kabel yang menggunakan media penghantar gelombang radio atau cahaya infrared. Frekuensi yang digunakan pada radio untuk jaringan computer biasanya menggunakan frekuensi tinggi, yaitu 2,4 GHz dan 5,8 GHz. Sedangkan penggunaan infrared umumnya hanya terbatas untuk jenis jaringan point to point. - Berdasarkan Fungsi.
- Client Server
Client Server adalah jaringan kompputer yang salah satu (boleh lebih) komputer difungsikan sebagai server atau induk bagi komputer lain. Server melayani komputer lain yang disebut client. Layanan yang diberikan bisa berupa akses Web, e-mail, file, atau yang lain. Client server banyak dipakai pada internet - Peer to Peer
Peer to Peer adalah jaringan computer dimana setiap komputer bisa menjadi server sekaligus client. Setiap komputer dapat menerima dan memberikan accses dari atau ke komputer lain. Peer to Peer banyak di implementasikan pada LAN. - Definisi IP
- Mendefinisikan paket yang menjadi unit satuan terkecil pada transmisi data di internet.
- Memindahkan data antara transport layer dan network interface layer.
- Mendefinisikan skema pengalamatan internet atau IP address.
- Menentukan routing paket.
- Melakukan fragmentasi dan penyusunan ulang paket.
- Adanya bit error pada saat datagram melewati suatu media.
- Router yang dilewati men-discard datagram, karna terjadinya kongesti dan kekurangan ruang buffer memory.
- Media fisik jaringan mengalami kerusakan permanen.
- Putusnya rute ketujuan untuk sementara waktu akibat adanya router yang down.
- Terjadinya kekacauan routing, sehingga datagram mengalami looping.
- TCP dan UDP
- IP Address
- Kelas A
- Kelas B
- Kelas C
- DHCP server
DHCP server (Dynamic Host Configuration Protocol) adalah protokol yang digunakan untuk keperluan alokasi IP Address secara otomatis. Sehingga pengguna computer client tidak perlu melakukan konfigurasi IP address secara manual. - Firewall
Firewall merupakan software untuk keperluan security. Biasanya firewall digunakan untuk mengatur akses keluar masuk jaringan lokal. - NAT
NAT (Network Address Translattion) merupakan suatu teknik yang memungkinkan computer – computer dengan IP address private atau lokal tetap dapat mengakses internet (IP address public). NAT banyak digunakan pada kantor – kantor atau warung internet yang alokasi IP address public-nya terbatas. - ADSL atau dial-up modem
Access Point tertentu ada yang memiliki fitur sebagai modem. Sehingga akses internet via provider internet dapat dilakukan tanpa bantuan modem tambahan. - Wireless Bridge
Access Point dengan fitur seperti ini dapat digunakan untuk menghubungkan satu jaringan wireless dengan jaringan wireless lainnya. - Alokasi secara automatic
Dalam metode ini pemberian alamat IP oleh DHCP Server bersifat tetap atau permanent (waktu sewa tak terbatas), sehingga DHCP Client akan selalu menggunakan alamat IP tersebut. -
Alokasi secara dynamic
Penyewaan IP yang diberikan pada client statusnya adalah sewa selama durasi waktu tertentu, ketika waktu penyewaan habis alamat IP tersebut akan ditarik kembali oleh DHCP Server. -
Alokasi secara reservation
Administrator jaringan akan memberikan alamat IP kepada host tertentu dari DHCP server dan dikonfigurasi dengan reservation (dicadangkan), yang artinya alamat IP yang sama akan selalu diberikan ke client tertentu. - DHCP server merupakan sebuah mesin yang menjalankan layanan yang dapat "menyewakan" alamat IP dan informasi TCP/IP lainnya kepada semua client yang memintanya. Beberapa sistem operasi jaringan seperti Windows NT Server, Windows 2000 Server, Windows Server 2003, atau GNU/Linux memiliki layanan seperti ini.
- DHCP client merupakan mesin client yang menjalankan perangkat lunak client DHCP yang memungkinkan mereka untuk dapat berkomunikasi dengan DHCP Server. Sebagian besar sistem operasi client jaringan (Windows NT Workstation, Windows 2000 Professional, Windows XP, Windows Vista, atau GNU/Linux) memiliki perangkat lunak seperti ini.
- DHCPDISCOVER: DHCP client akan menyebarkan request secara broadcast untuk mencari DHCP Server yang aktif.
- DHCPOFFER: Setelah DHCP Server mendengar broadcast dari DHCP Client, DHCP server kemudian menawarkan sebuah alamat kepada DHCP client.
- DHCPREQUEST: Client meminta DCHP server untuk menyewakan alamat IP dari salah satu alamat yang tersedia dalam DHCP Pool pada DHCP Server yang bersangkutan.
- DHCPACK: DHCP server akan merespons permintaan dari client dengan mengirimkan paket acknowledgment. “acknowledgment” dalam teknologi informasi adalah sebuah transmisi yang dikirimkan oleh pihak station penerima dalam jaringan kepada pihak pengirim bahwa data yang dikirimkan telah diterima dengan sempurna tanpa ada kesalahan. Jika station penerima menemukan bahwa transmisi data mengalami keterlambatan atau tidak sampai ke tujuan, maka station penerima akan mengirimkan sinyal NAK (Negative Acknowledgment) yang menandakan bahwa data yang dikirimkan oleh pengirim tidak sampai dan memintanya untuk mengirim kembali data yang sama.
- Mudah dalam transfer data dari PC server ke PC client.
- DHCP menyediakan alamat-alamat IP secara dinamis dan konfigurasi lain. DHCP ini di-design untuk melayani network yang besar dan konfigurasi TCP/IP yang kompleks.
- DHCP memungkinkan suatu client menggunakan alamat IP reusable, artinya alamat IP tersebut bisa dipakai oleh client yang lain jika client tersebut tidak sedang menggunakanya.
- DHCP memungkinkan suatu client menggunakan satu alamat IP untuk jangka waktu tertentu dari server.
- DHCP akan memberikan satu alamat IP dan parameter-parameter konfigurasi lainnya kepada client.
- Terhubungnya komputer yang tidak diinginkan masuk pada jaringan komputer.Sehingga komputer atau laptop yang tidak diinginkan tersebut dapat mengakses sumber daya yang ada pada jaringan.Untuk menghindari hal tersebut, setiap client komputer yang ingin terhubung ke jaringan harus di identifikasi keabsahannya.dengan menerapkan MAC address yang dimiliki oleh setiap NIC, dapat diketahui keabsahan komputer tersebut. sehingga jika ada MAC address yang tidak terdaftar di komputer DHCP server, maka komputer tersebut tidak dapat mengakses jaringan.
- Flowchart Sistem
Yaitu diagram alir yang menggambarkan suatu sistem peralatan computer yang digunakan dalam proses pengolahan data dan hubungan antara peralatan tersebut. Flowchart sistem digunakan untuk menggambarkan urutan langkah untuk memecahkan masalah, tetapi hanya untuk menggambarkan prosedur dalam sistem yang dibentuk. - Flowchart Program
Yaitu bagan yang menggambarkan urutan logika dari suatu prosedur pemecahan masalah. -
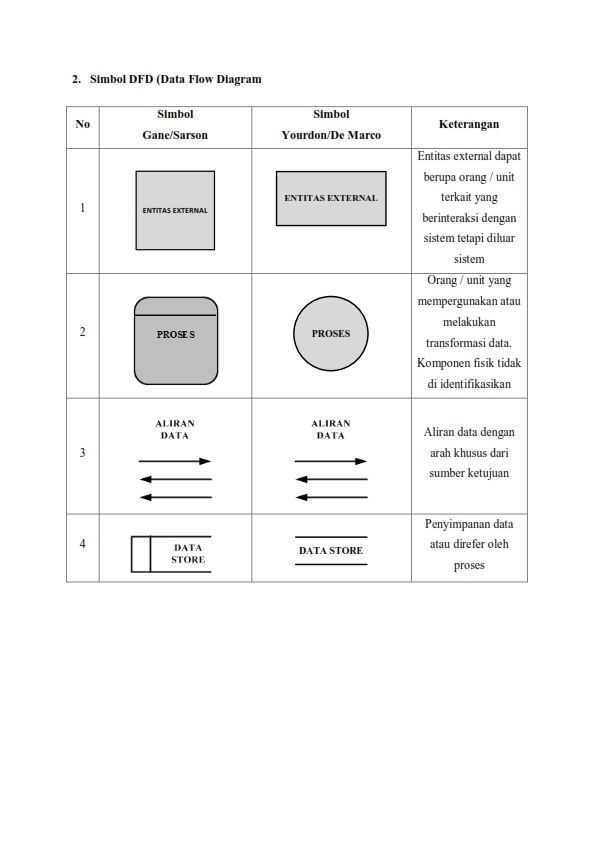
Kesatuan Luar
Kesatuan Luar adalah kesatuan diluar sistem yang akan memberikan input atau menerima output dari sistem, dapat berupa orang, organisasi, sumber informasi lain ataupun penerima akhir dari suatu laporan. - Proses
Proses merupakan kegiatan atau pekerjaan yang dilakukan oleh orang atau mesin komputer, dimana aliran data masuk ditransformasikan ke aliran data keluar. - Arus Data
Komponen ini digunakan untuk memodelkan kumpulan data atau paket data. Notasi yang digunakan adalah garis sejajar, segi empat dengan sudut melengkung atau persegi panjang. - Data Stores
Dipresentasikan dalam bentuk anak panah yang menuju ke atau dari proses dan digunakan untuk menggambarkan gerakan paket data atau informasi dari satu bagian ke bagian lain dari sistem dimana penyimpanan mewakili lokasi penyimpanan data. - Identifikasi semua kesatuan luar yang terlibat dengan sistem.
- Identifikasi input dan output yang berhubungan dengan kesatuan luar.
- Buat diagram konteks, merupakan diagram dari sebuah sistem yang menggambarkan aliran data yang masuk dan yang keluar dari sistem maupun dari entitas luar.
- Setelah diagram konteks dibuat maka akan dilanjutkan dengan pembuatan DFD level 1.
- Kesalahan interface.
- Kesalahan dalam struktur data atau akses berbasis data eksternal.
- Inisialisasi dan kesalahan terminasi.
- Validasi fungsional.
- Kesensitifan sistem terhadap nilai input tertentu.
- Batasan dari suatu data.
- Menjamin seluruh jalur independen di dalam modul yang dieksekusi sekurang – kurangnya sekali.
- Menguji semua keputusan logika.
- Menguji seluruh loop yang sesuai dengan batasanya.
- Menguji seluruh struktur data internal yang menjamin validasi
- Elisitasi Tahap I
Elisitasi tahap I, berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara. - Elisitasi Tahap II
Elisitasi tahap II, merupakan hasil pengklasifikasian elisitasi tahap I berdasarkan metode MDI. Metode MDI bertujuan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh penulis untuk dieksekusi. Berikut penjelasan mengenai Metode MDI : - M pada MDI berarti Mandatory (penting). Maksudnya, requirement tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
- D pada MDI berarti Desirable. Maksudnya, requirement tersebut tidak terlalu penting dan boleh dihilangkan. Namun, jika requirement tersebut digunakan dalam pembentukan sistem maka akan membuat sistem tersebut lebih sempurna.
- I pada MDI berarti Inessential. Maksudnya, requirement tersebut bukanlah bagian sistem yang dibahas, tetapi bagian dari luar sistem.
- Elisitasi Tahap III
Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklasifikasikan kembali melalui metode TOE, yaitu : - T artinya Teknikal, bagaimana tata cara atau teknik pembuatan requirement dalam sistem diusulkan ?
- O artinya Operasional, bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan ?
- E artinya Ekonomi, berapakah biaya yang diperlukan guna membangun requirement di dalam sistem ?
- High (H): Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal. Maka requirement tersebut harus dieleminasi.
- Middle (M): Mampu dikerjakan.
- Low (L): Mudah dikerjakan.
- Final Draft Elisitasi
Final Draft elisitasi, merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan dikembangkan. - CISC
- RISC
- Perbedaan RISC dengan CISC dilihat dari segi intruksinya :
- RISC ( Reduced Instruction Set Computer )
- CISC ( Complex Instruction Set Computer )
- Broadcom BCM2835 ARM11 700Mhz, Merupakan mikroprosesor dari Raspberry Pi Rev B.
- HDMI out , HDMI 1.3a-compliant mendukung sinyal HDMI dan DVI-D.
- CSI connector camera
Camera serial interface dengan 15 pin flat flex kabel headeruntuk CSI-2 interface MIPIAliansi.Standar antarmuka CSI mendefinisikan standar antarmuka serial searah untuk perangkat kamera CSI-compliant. - Ethernet Out (hanya dalam model 256 Mb). Mendukung fungsi Wakeon-LAN dan TCP / UDP.
- USB 2.0
Fungsi USB disediakan oleh SMSC LAN9512 pada kedua Model A dan Model B. LAN9512 adalah paket menarik dan cara yang sangat baik untuk menghemat ruang PCB. Port USB pada Pi adalah USB 2.0 dengan maksimum menarik arus yang disarankan 100 mA. - Status LED
Memiliki 4 Led sebagai indicator status dari setiap fungsi pada Raspberry Pi. D5 menyala hijau menjelaskan system/ akses terkoneksi dengan SD card, D6 menyala merah menjelaskan power terkoneksi, 3.3V. D7 menyala hijau sebagai full duplex, half duplex jika LED padam. D8 menyala hijau menjelaskan Link activitas untuk LAN. - AUDIO OUTPUT. Sebagai stereo audio output.
- JTAG Header
JTAG interface digunakan untuk memprogram chip SoC dan chip SMSC didalam board. Pabrikan juga menggunakan JTAG untuk menguji hardware pada saat pembuatannya. - RCA Video output. Sebagai video output cadangan pada Raspberry Pi apabila fungsi HDMI tidak digunakan.
- GPIO Header
Terdiri dari 26 pin yang berfungsi untuk pengontrolan suatu perangkat yang dikontrol oleh suatu perangat lunak baik dikonfigurasi sebagai pin input maupun sebagai pin output. Fitur-fitur pada GPIO diantaranya : pin I2C, pin RX TX, pin PWM, pin PPM dan disediakan pin dengan tegangan 5V dan 3.3V. semua pin pada GPIO memiliki tingkat logika 3.3V. - DSI Display connector
Display Serial Interface dengan 15 pin flat flex yang tampak persis dengan dega CSI-2 interface, biasanya digunakan untuk display LCD seperti LCD pada ponsel. DSI juga dapat digunakan sebagai I2C. - SD card slot
Sebagai slot untuk SD card atau slot mikro SD, yang berisikan OS untuk di akses oleh pengguna Raspberry Pi. - Micro USB power
Dengan power input 5V 1A DC untuk memenuhi kebutuhan tegangan dan arus pada Raspberry Pi. - General purpose computing
Kita dapat menjadikan Raspberry Pi sebagai komputer seperti yang biasa kita gunakan sehari-hari dengan menghubungkannya ke monitor dan mengatur tampilan grafisnya melalui web browser. - Media belajar pemrograman
Di dalam Raspberry Pi sudah terdapat interpreter dan compiler dari berbagai bahasa pemrograman seperti C, Ruby, Java, Perl, dll karena sebenarnya tujuan awal Raspberry Pi adalah untuk mengencourage anak-anak untuk belajar pemrograman - Media belajar pemrograman
Di dalam Raspberry Pi sudah terdapat interpreter dan compiler dari berbagai bahasa pemrograman seperti C, Ruby, Java, Perl, dll karena sebenarnya tujuan awal Raspberry Pi adalah untuk mengencourage anak-anak untuk belajar pemrograman. - Project platform
Raspberry Pi mempunyai kemampuan untuk berintegrasi dengan alat-alat elektronik lain. Misalnya, Raspberry Pi bisa digunakan sebagai remote AC. - Media center
Karena Raspberry Pi memiliki port HDMI dan audio/video maka Raspberry Pi dapat dengan mudah dihubungkan ke monitor. Keunggulan ini didukung oleh kekuatan prosesor Raspberry Pi yang cukup untuk memutar video full screen yang high definition. Selain itu, di dalam Raspberry Pi sendiri sudah terdapat XBMC (media player) yang mensupport berbagai macam format media file. - Sumber tegangan : 3.3V, 5V dan 0V.
- General purpose digital inputs/outputs – 8 pin.
- I2C - 2 pin. Digunakan ke berbagai antarmuka I2C diantaranya.
- SPI - 5 pin. Digunakan untuk antarmuka ke berbagai IC.
- UART - 2 pin.
Digunakan untuk data serial input dan output dan komunikasi untuk ke peripheral external seperti RS232 atau modbus. - Tidak digunakan - 6 pin
Jangan pernah menghubungkan apa-apa ke pin yang ditandai tidak digunakan. Pin tersebut disediakan untuk fungsi internal BCM2836 hardware. Apabila menghubungkan hal apapun untuk pin ini akan mengakibatkan kerusakan pada Raspberry Pi. - Bodhi
Bodhi adalah distribusi Linux berbasis Ubuntu untuk desktop yang menampilkan sisi termudah berkomputer, seperti windows manager yang elegan dan ringan. Proyek yang mengintegrasi dan pra-konfigurasi terbaru membangun kemudahan langsung dari repositori pengembangan proyek, menawarkan modularitas, tingkat kustomisasi tinggi, dan pilihan tema segudang. Default sistem Bodhi sendiri sangat ringan, satu-satunya aplikasi pra-instal adalah Midori, LXTerminal, EFM (Enlightenment File Manager), Leafpad dan Synaptic. lebih banyak lagi tersedia dan mudah dipasang melalui AppCenter, sebuah perangkat lunak berbasis web instalasi. - GeeXboX
GeeXboX adalah media center gratis dan open-source berorientasi distribusi Linux untuk perangkat embedded dan komputer desktop. Ini adalah sebuah sistem operasi dengan fitur lengkap yang dapat di-boot dari live CD, Flashdisk USB, kartu SD / MMC atau dapat diinstal pada regular hard disk drive. Distribusi GeeXboX sangat ringan dan dirancang untuk menanamkan semua aplikasi multimedia utama dalam rangka untuk mengubah komputer menjadi komputer pribadi home theater. Proyek GeeXboX adalah sebuah organisasi non-komersial yang didirikan pada tahun 2002. - Pidora
Pidora adalah distribusi software Linux untuk komputer Raspberry Pi. Ini berisi paket perangkat lunak dari proyek Fedora dikompilasi untuk arsitektur ARMv6 digunakan pada Raspberry Pi, paket yang telah secara khusus ditulis untuk atau dimodifikasi untuk Raspberry Pi, dan perangkat lunak yang disediakan oleh Raspberry Pi Foundation untuk akses perangkat. - Raspbian
Raspbian adalah sistem operasi bebas berbasis Debian GNU / Linux dan dioptimalkan untuk perangkat keras Raspberry Pi (arsitektur prosesor armhf). Raspbian dilengkapi dengan lebih dari 35.000 paket, atau perangkat lunak pre-compiled paket dalam format yang bagus untuk kemudahan instalasi pada Raspberry Pi. Awal di rilis sejak Juni 2012, menjadi distribusi yang terus aktif dikembangkan dengan penekanan pada peningkatan stabilitas dan kinerja sebanyak mungkin. Meskipun Debian menghasilkan distribusi untuk arsitektur lengan, Raspbian hanya kompatibel dengan versi yang lebih baru dari yang digunakan pada Raspberry Pi (ARMv7 CPU-A dan vs Raspberry Pi ARMv6 CPU yang lebih tinggi). - Raspbmc
Raspbmc adalah distribusi Linux minimal berbasis Debian yang membawa software XBMC media center ke komputer Raspberry Pi. Perangkat ini memiliki faktor bentuk yang sangat baik dan kekuatan yang cukup untuk menangani pemutaran media, menjadikan sebuah komponen yang ideal dalam program pengaturan HTPC (Home Theatre Personal Computer), sesuatu yang berbeda akan anda temui disini. - Raspy Fi
Raspy Fi adalah distribusi Linux berbasis Debian yang dibuat khusus untuk Raspberry Pi. Hal ini bertujuan untuk sepenuhnya mengintegrasikan Music Player, sebuah open-source server pemutar musik berbasis Debian, saat ini hanya mengoptimalkan untuk pemutaran musik Audiophile menjadi lebih berkualitas saja. RaspyFi juga memudahkan untuk memainkan playlist musik langsung dari perangkat penyimpanan USB atau dari Network Attached Storage dan juga memungkinkan pengguna untuk mendengarkan stasiun radio berbasis web dari Spotify, Last.fm dan SoundCloud. - RISC OS
RISC OS adalah sistem operasi komputer awalnya dirancang oleh Acorn Computers Ltd di Cambridge, Inggris pada tahun 1987. RISC OS secara khusus dirancang untuk berjalan pada chipset ARM, dan Acorn telah dirancang secara bersamaan untuk digunakan dalam lini baru dari komputer pribadi Archimedes. Sesuai dengan namanya RISC (reduced instruction set computing) arsitektur yang didukung. Cepat, kompak dan efisien, RISC OS dikembangkan dan diuji oleh komunitas setia pengembang dan penggunanya. RISC OS bukanlah versi Linux, dan tidak ada sangkut-paut dengan Windows, dan memiliki sejumlah fitur unik dan aspek desain yang elegan. - Tahanan
- Pembangkit potensial listrik, maksudnya tahanan ini bisa menimbulkan potensial listrik dengan nilai tertentu.
- Memperkecil tegangan (potensional) listrik, maksudnya dengan pemasangan ini bisa berhasil menurunkan tegangan listrik dari sumber listrik..
- Memperkecil arus listrik, maksudnya jika dipasangkan tahanan dalam rangkaian kawat maka akibatnya arus listrik yang mengalir menjadi lebih kecil.
- Pembagi tegangan listrik, maksudnya bahwa dengan pemakaian tahanan ini akan berhasil membagi tegangan listrik dari suatu sumber listrik, tetapi bila hasil pembagian itu dijumlahkan akan sama dengan tegangan sumbernya..
- Tahanan Kawat
Tahanan ini terbuat dari logam campuran yaitu manganin atau konstanta. Tahanan ini biasanya digunakan pada temperatur tinggi dan tahanan ini mempunyai daya berkisar 1 watt – 50 watt. - Tahanan Arang
Tahanan ini dibuat dengan cara melapiskan suatu bahan arang tipis pada batang isolator. Tahanan ini mempunyai daya ¼ watt, ½ watt dan 1 watt. Jenis tahanan ini adalah tahanan yang paling banyak digunakan. Adapun besar kecilnya nilai tahanan pada tahanan arang ini bisa diketahui dengan melihat warna pada resistor tersebut. Warna pada resistor tersebut merupakan suatu kode untuk menghitung besarnya nilai tahanan dan nilai toleransi pada resistor tersebut. - Tahanan Variabel
Adalah jenis tahanan yang nilai resistansinya bisa diubah-ubah. Tahanan ini banyak jenisnya diantaranya adalah potensiometer (diputar), reostat (perubahan secara linear/digeser) dan trimpot (trimer potensiometer). - LDR (Light Dependent Resistor)
Adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahanannya akan mengecil apabila terkena cahaya dan membesar apabila tidak terkena cahaya. - NTC (Negative Temperatur Coefisien) dan PTC (Positive Temperatur Coefisien).
Adalah jenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC pada suhu yang tinggi nilai tahanannya turun dan pada suhu yang rendah nilai tahanannya naik, sedangkan PTC kebalikannya pada pada suhu yang tinggi nilai tahanannya naik dan pada suhu yang rendah nilai tahanannya turun. - Dioda
- Dioda Zener
Diode zener seperti diode penyearah memungkinkan arus mengalir dengan arah maju. Berbeda dengan diode penyearah, pada diode zener tegangan patah arah mundur jauh lebih rendah dibandingkan dengan yang ada pada diode penyearah arah biasa. Arus ekstra yang besar memungkinkan diode zener dapat menghantarkan arus pada arah mundur. Arus bias terbalik tersebut akan merusak diode normal, tetapi diode zener tersebut dibuat beroperasi dengan cara ini. Ukuran kerja tegangan diode zener yang tertentu dari diode zener menunjukkan tegangan pada diode yang memulai menghantarkan apabila diberi bias mundur (terbalik). Diode zener dapat digunakan untuk membuat bentuk atau kondisi sinyal dari sensor untuk digunakan oleh computer digital. - LED (Light Emitting Diode)
LED merupakan komponen yang dapat mengelurakan emisi cahaya. LED merupakan produk temuan lain setelah diode. Strukturnya juga sama dengan diode. LED dibuat agar lebih efisien jika mengeluarkan cahaya. Untuk mendapatkan emisi cahaya pada semikonduktor, doping yang dipakai adalah gallium, arsenic, dan fosfor, jenis doping yang berbeda menghasilkan warna cahaya yang berbeda pula. - Diode Varactor
Komponen kapasitor adalah komponen pasif yang nilainya statis, dengan ditemukannya teknologi dioda maka pengembangannya adalah membuat komponen kapasitor yang aktif terhadap tegangan yang diberikan, terbetuklah dioda varactor. Dioda ini akan berubah menjadi kapasitor dengan nilai kapasitansi tergantung dari tegangan yang diberikan. Komponen ini sangat penting dalam desain rangkaian yang berkaitan dengan frekuensi yang membutuhkan nilai kapasitansi aktif seperti rangkaian oscilator. Kapasitansi ditentukan oleh nilai tegangan yang diterima sehingga bisa ditetapkan pula frekuensi yang akan dilewatkan. - Fotodioda
Fotodioda adalah diode sambungan PN yang secara khusus dirancang untuk mendeteksi cahaya. Fotodioda seringkali digunakan sehubungan dengan kabel fiber – optic untuk keperluan tranmisi data. Didalam transmitter sinyal input (umumnya pulsa digital) dirubah dari energi cahaya oleh sorotan sumber cahaya selama transmitter OFF dan ON denga sangat cepat. Pulsa sorot cahaya tersebut memantul melewati inti fiber. Pada ujung lain dari fiber adalah peneriman yang berisi fotodioda yang menerima pulsa sorotan cahaya dan merubahnya kembali menjadi bentuk aliran listrik aslinya. - Diode Bridge
Dioda Bridge ditemukan oleh J. A Fleming pada tahun 1904, Ia adalah seorang ilmuan yang berasal dari inggris (1849-1945). Dioda bridge atau dikenal dengan sebutan jembatan dioda adalah rangkaian yang digunakan untuk penyearah arus ( rectifier) dari AC ke DC. Untuk membuat dioda bridge dengan benar maka perlu diketahui tipe dioda yang akan digunakan, Elemen dioda berasal dari dua kata elektroda dan katoda. Diode memiliki simbol khusus, yaitu anak panah yang memiliki garis melintang pada ujungnya. Alasan dibuatnya symbol tersebut adalah karena sesuai dengan prinsip kerja dari dioda. Anoda ( kaki positif = P) terdapat pada bagian pangkal dari anak panah tersebut dan katoda ( kaki negative = N ).terdapat pada bagian ujung dari anak panah. - Transistor
- Kapasitor
- Kapasitor tetap
- Kapasitor tidak tetap
Kapasitor yang nilai kapasitansinya dapat berubah-ubah, nilai kapasitansi pada kapasitor dapat dilihat dari kode yang terdapat pada fisik kapasitor. Sebagai contoh, jika tertera 105, itu berarti 10 x 105 = 1.000.000 pF = 1000 nF = 1 µF. Nilai yang dibaca pF (pico farad). Kapasitor lain ada yang tertulis 0.1 atau 0.01, jika demikian, maka satuan yang dipakai µF. Jadi 0.1 berarti 0.1 µF. - Stator
Badan mesin ini berfungsi sebagai tempat mengalirnya fluks magnet yang dihasilkan kutub magnet, sehingga harus terbuat dari bahan ferromagnetik. Fungsi lainnnya adalah untuk meletakkan alat-alat tertentu dan mengelilingi bagian-bagian dari mesin, sehingga harus terbuat dari bahan yang benar-benar kuat, seperti dari besi tuang dan plat campuran baja. - Magnet
Inti kutub magnet dan belitan penguat magnet ini berfungsi untuk mengalirkan arus listrik agar dapat terjadi proses elektromagnetik. Adapun aliran fluks magnet dari kutub utara melalui celah udara yang melewati badan mesin. - Brushes
Sikat sikat ini berfungsi sebagai jembatan bagi aliran arus jangkar dengan bebas, dan juga memegang peranan penting untuk terjadinya proses komutasi. - Comutator
Comutator ini berfungsi sebagai penyearah mekanik yang akan dipakai bersama sama dengan sikat. Sikat-sikat ditempatkan sedemikian rupa sehingga komutasi terjadi pada saat sisi kumparan berbeda. - Rotor
Rotor dibuat dari bahan ferromagnetic dengan maksud agar kumparan Rotor terletak dalam daerah yang induksi magnetiknya besar, agar gaya gerak listrik induksi yang dihasilkan dapat bertambah besar. - Windings atau Belitan jangkar
Belitan jangkar merupakan bagian yang terpenting pada mesin arus searah, berfungsi untuk tempat timbulnya tenaga putar motor. Prinsip Kerja Motor DC dengan sikat karbon, putaran rotor pada motor DC bersikat mengikuti kaidah tangan – kanan gaya Lorentz. - Kecepatan putaran mudah dikendalikan
Semakin besar tegangan yang diberikan, maka akan semakin cepat putarannya. Semakin kecil tegangan yang diberikan, maka akan semakin lambat putarannya, dengan kata lain, kecepatan putaran berbanding lurus dengan besarnya tegangan. - Torsi mudah dikendalikan
Semakin besar arus listrik yang disediakan, maka akan semakin kuat torsinya. Semakin kecil arus listrik yang disediakan, maka akan semakin lemah torsinya, dengan kata lain, torsi berbanding lurus dengan besarnya arus listrik.Kelemahan utama dari Brushed DC Motor adalah penggantian sikat karbon di dalamnya harus dilakukan secara berkala dan diberi pelumasan yang cukup agar tetap memiliki kinerja yang baik. - Driver : L298N Dual H Bridge DC Motor Driver IC
- Driven part of the terminal supply area Vs: +5 V ~ +35 V; such as the need to take power within the board, the supply area Vs: +7 V ~ +35 V
- Driven part of the peak current Io: 2A
- The logical part of the terminal supply area Vss: +5 V ~ +7 V (can take power within the board +5 V)
- The logical part of the operating current range: 0 ~ 36mA
- Control signal input voltage range : Low:-0.3V = Vin = 1.5V and High: 2.3V = Vin = Vss
- Enable signal input voltage range: Low: -0.3 = Vin = 1.5V (control signal is invalid) and High: 2.3V = Vin = Vss (control signal active)
- Maximum power consumption: 20W (when the temperature T = 75 ?)
- Storage temperature: -25 ? ~ +130 ?
- Other Extensions: control of direction indicators, the logic part of the plate to take power interface.
- Driver Board Size: 55mm * 60mm * 30mm
- Drive plate Weight: 33g
- Objeck yang sedang dideteksi terlalu kecil, terlalu ringan atau terlalu lunak untuk dapat mengoperasikan mekanis sakla.
- Diperlukan respon yang cepat dan kecepatan penghubung yang tinggi.
- bjek harus dirasakan melalui rintangan non logam seperti gelas, plastic, dan kertas karton.
- Lingkungan yang ganas menuntut penyempurnaan kerja dari suatu sistem
- Diperlukan ketahanan dan keandalan suatu part (lifetime).
- Power Supply: 5 VDC
- supply current DC <25mA
- maximum load current 100mA (Open-collector NPN pulldown output)
- output operation : Normally Open (NO)
- response time <2ms
- Diameter: 17 mm, pointing angle: = 15 °
- effective from 3-80CM Adjustable
- detection of objects: transparent or opaque
- working environment temperature: -25?+55? Case
- Material: Plastic Lead
- Length: 40 cm
- Red : V+
- Yellow : Signal
- Green : GND
- Drive current: 20mA
- Control signal: 5V/12V/24V TTL level
- Maximum switching voltage: 250VAC 30VDC
- Dimension:35mm*50mm*15mm
- 2 channel Relay
- Dapat switch AC dan DC, transistor hanya switch DC
- Relay dapat switch tegangan tinggi, transistor tidak dapat
- Relay pilihan yang tepat untuk switching arus yang besar
- Relay dapat switch banyak kontak dalam satu waktu
- Relay ukurannya jauh lebih besar dari pada transistor
- Relay tidak dapat switch dengan cepat
- Relay butuh daya lebih besar dibanding transistor
- Relay membutuhkan arus input yang besar
- LM78S05 : 2 A
- LM7805 : 1 A
- LM78M05 : 500 mA
- LM78L05 : 100 mA
- Video Calling (640 x 480 pixels) with recommended system
- Video capture : up to 1024 x 768 pixels
- Logitech fluid crystal technology
- Photo : up to 5 megapixels (software enhanced)
- Built in mic with noise reduction
- Hi speed USB 2.0 certified (recommended)
- Universal clip fits laptops, LCD or CRT monitors
- Memiliki kepustakaan yang luas dalam distribusi Python telah disediakan modul-modul siap pakai untuk berbagai keperluan.
- Memiliki tata bahasa yang jernih dan mudah dipelajari.
- Memiliki aturan layout kode sumber yang memudahkan pengecekan, pembacaan kembali dan penulisan ulang kode sumber.
- berorientasi obyek.
- Memiliki sistem pengelolaan memori otomatis (garbage collection, seperti java).
- Modular, mudah dikembangkan dengan menciptakan modul-modul baru; modul-modul tersebut dapat dibangun dengan bahasa Python maupun C/C++.
- Memiliki fasilitas pengumpulan sampah otomatis, seperti halnya pada bahasa pemrograman Java, python memiliki fasilitas pengaturan penggunaan ingatan komputer sehingga para pemrogram tidak perlu melakukan pengaturan ingatan komputer secara langsung.
- Fitur-fitur yang dimiliki android adalah:
- Jajaran Sistem Operasi Android
- Android versi 1.1
Pada 9 Maret 2009, Google merilis Android versi 1.1. Android versi ini dilengkapi dengan pembaruan estetis pada aplikasi, jam alarm, voice search (pencarian suara), pengiriman pesan dengan Gmail, dan pemberitahuan email. - Android Versi 1.5 (Cupcake)
Pada pertengahan Mei 2009, Google kembali merilis telepon seluler dengan menggunakan Android dan SDK (Software Development Kit) dengan versi 1.5 (Cupcake). Terdapat beberapa pembaruan termasuk juga penambahan beberapa fitur dalam seluler versi ini yakni kemampuan merekam dan menonton video dengan modus kamera, mengunggah video ke Youtube dan gambar ke Picasa langsung dari telepon, dukungan Bluetooth A2DP, kemampuan terhubung secara otomatis ke headset Bluetooth, animasi - Android Versi 1.6 (Donut)
Donut (versi 1.6) dirilis pada September dengan menampilkan proses pencarian yang lebih baik dibanding sebelumnya, penggunaan baterai indikator dan kontrol applet VPN. Fitur lainnya adalah galeri yang memungkinkan pengguna untuk memilih foto yang akan dihapus, kamera, camcorder dan galeri yang dintegrasikan, CDMA / EVDO, 802.1x, VPN, gestures, kemampuan dial kontak, teknologi text to change speech, pengadaan resolusi VWGA. - Android Versi 2.1 (Eclair)
Pada 3 Desember 2009 kembali diluncurkan ponsel Android dengan versi 2.0/2.1 (Eclair), perubahan yang dilakukan adalah pengoptimalan hardware, peningkatan Google Maps 3.1.2, perubahan UI dengan browser baru dan dukungan HTML5, daftar kontak yang baru, dukungan flash untuk kamera 3,2 MP, digital Zoom, dan Bluetooth 2.1. - Android Versi 2.2 (Froyo: Frozen Yogurt)
Pada 20 Mei 2010, Android versi 2.2 (Froyo) diluncurkan. Perubahan-perubahan umumnya terhadap versi-versi sebelumnya antara lain dukungan Adobe Flash 10.1, kecepatan kinerja dan aplikasi 2 sampai 5 kali lebih cepat, intergrasi V8 JavaScript engine yang dipakai Google Chrome yang mempercepat kemampuan rendering pada browser, pemasangan aplikasi dalam SD Card, kemampuanWiFi Hotspot portabel, dan kemampuan auto update dalam aplikasi Android Market. - Android Versi 2.3 (Gingerbread)
Pada 6 Desember 2010, Android versi 2.3 (Gingerbread) diluncurkan. Perubahan-perubahan umum yang didapat dari Android versi ini antara lain peningkatan kemampuan permainan (gaming), peningkatan fungsi copy paste, layar antar muka (User Interface) didesain ulang, dukungan format video VP8 dan WebM, efek audio baru (reverb, equalization, headphone virtualization, dan bass boost), dukungan kemampuan Near Field Communication (NFC), dan dukungan jumlah kamera yang lebih dari satu. - Android Versi 3.0 (Honeycomb)
Android Honeycomb dirancang khusus untuk tablet. Android versi ini mendukung ukuran layar yang lebih besar. User Interface pada Honeycomb juga berbeda karena sudah didesain untuk tablet. Honeycomb juga mendukung multi prosesor dan juga akselerasi perangkat keras (hardware) untuk grafis. - Android Versi 4.0 (Ice Cream Sandwich)
Ice Cream Sandwich didesain untuk baik itu telepon ataupun tablet. Android ICS menawarkan banyak peningkatan dari apa yg sudah ada di Gingerbread dan Honeycomb dengan pada saat yang sama memberikan inovasi-inovasi baru. Beberapa peningkatan itu antara lain kemampuan copy paste yang lebih baik, data logging dan warnings, dan kemampuan utk mengambil screenshot dengan menekan power dan volume bersamaan. Selain itu keyboardnya dan kamus juga mendapat perbaikan. Inovasi-inovasi baru di ICS antara lain penggunaan font “Roboto”. di Android 4.0 Ice Cream Sandwich System Bar dan Action Bar. adanya Android 4.0 Ice Cream Sandwich voice control yang memungkinkan kita mendikte teks yang ingin kita ketik. Selain itu Face Unlock merupakan salah satu hal yang menonjol di Android versi baru ini. Juga ada NFC based app yang disebut Android Bump, yang memungkinkan pengguna untuk bertukar informasi/data hanya dengan menyentuhkan gadget. - Android Versi 4.1 (Jelly Bean)
Android Jelly Bean yaang diluncurkan pada acara Google I/O lalu membawa sejumlah keunggulan dan fitur baru. Penambahan baru diantaranya meningkatkan input keyboard, desain baru fitur pencarian, UI yang baru dan pencarian melalui Voice Search yang lebih cepat - Android Versi 4.2 (jelly Bean)
Tidak ketinggalan Google Now juga menjadi bagian yang diperbarui. Google Now memberikan informasi yang tepat pada waktu yang tepat pula. Salah satu kemampuannya adalah dapat mengetahui informasi cuaca, lalu-lintas, ataupun hasil pertandingan olahraga. Sistem operasi Android Jelly Bean 4.1 muncul pertama kali dalam produk tablet Asus, yakni Google Nexus 7. - Android Versi 4.4 (KitKat)
Google mengumumkan Android 4.4 KitKat (dinamai dengan izin dari Nestlé dan Hershey) pada 3 September 2013, dengan tanggal rilis 31 Oktober 2013. Untuk menjalankan OS ini dibutuhkan spesifikasi smartphone dengan RAM sebesar 512MB, dengan demikian OS Android KitKat dapat ditujukan untuk segala jenis smartphone yang ada di pasaran dan di sematkan pada berbagai jenis perangkat warable yang saat ini banyak dikembangkan. - Android Versi 5.0 (Lollipop)
Diperkenalkan 26 juni 20014, Android lollipop ini membawa berbagai perubahan dalam hal UI atau tampilan. Terlihat pada status bar, dialer dan setiap aplikasi yang ada dengan desain UI lebih segar. Google juga sudah melakukan desain ulang terhadap transisi animasi sehingga mereka terlihat lebih alami - Penilitian yang dilakukan oleh Haerul Nurdiana (2013)
Penelitian yang berjudul ” Pemantauan Ruang Komputer Menggunakan Komputer Mini Raspberry Pi B Pada SMPN 1 Pasarkemis” penelitian ini membahas mengenai sistem pemantauan ruangan komputer dengan mengunakan Raspberry Pi B. sistem ini memanfaatkan protocol TCP/IP agar bisa melihat kondisi ruangan computer dengan cara membuka web browser dan memangil IP yang telah di tentukan pada settingan Raspberry Pi B. - Penelitian yang dilakukan oleh Jajuli Nugroho (2013)
Penelitian yang berjudul “Sistem Pengontrolan pintu Air Otomatis dan Informasi Ketinggian Air Menggunakan SMS Gateway” penelitian ini membahas mengenai sistem pemantauan ketinggian air pada bendungan, sistem ini memanfaatkan SMS Gateway sebagi media informasi. - Penelitian yang dilakukan syahid (2012)
Penelitian yang berjudul “Sistem Kontrol Robot Pemindah Barang Menggunakan Aplikasi Android Berbasis Arduino Uno” penelitian ini membahas tentang pengendalian robot menggunakan aplikasi android dengan koneksi USB. - Penelitian yang dilakukan Edi kurniawan (2014)
- Visi PT. Langgeng Baja Pratama
PT. Langgeng Baja Pratama Sebagai salah satu produsen kawat baja dan tali kawat baja terbesar di Indonesia, menjadikan kepuasan pelanggan menjadikan kebijakan utama bagi perusahaan. - Misi PT. Langgeng Baja Pratama
PT. Langgeng Baja Pratama berkomitmen mengedepankan hasil produksi yang berkualitas, bermutu serta aman dipergunakan sehingga kepuasan pelanggan tercapai. - Company Head
- Wewenang
- Tanggung Jawab
- General Manager
- Wewenang
- Tanggung Jawab
- Plant manager
- Wewenang
- Tanggung Jawab
- Assistant Plant Manager
- Wewenang
- Tanggung Jawab
- Purchasing Manager
- Wewenang
- Tanggung Jawab
- F.A.M Manager
- Wewenang
- Tanggung Jawab
- Marketing Manager
- Wewenang
- Tanggung Jawab
- HRD&GA Manager
- Wewenang
- Tanggung Jawab
- QA & QC Manager
- Wewenang
- Tanggung Jawab
- PCC & WHS Manager
- Wewenang
- Tanggung Jawab
- Production Manager
- Wewenang
- Tanggung Jawab
- Maintenance Manager
- Wewenang
- Tanggung Jawab
- Technical Manager
- Wewenang
- Tanggung Jawab
- Mulai
- Ambil kain lap, jika ya lanjutkan ambil air
- Ambil air jika ya lanjutkan membersihkan panel surya
- Selesai
- Mulai
- Koneksi WiFi
- Login
- Jika login invalid kembali login
- Jika login success, start robot
- Webcam on, robot bergerak Forward dan motor pompa on
- Jika sensor depan aktif, maka motor bergerak reveres dan motor pompa off
- Jika sensor belakang aktif , robot berhenti
- Selesai
- Wifi Adapter
Dimana user untuk terhubung dengan robot dan mendapatkan access controlling menggunakan jaringan Wifi. Pada proses ini user interface menggunakan smart phone sebagai client dan raspberry pi sebagai access point. - Raspberry Pi
Raspberry pi sebagai embedded system berbasis linux, melakukan pengontrolan input – output sesuai coding program yang dibuat sebelumnya. - Motor Driver
Pada proses ini motor driver berfungsi sebagai memutar arah putaran motor DC, sehingga motor dapat berputar searah jarum jam atau berlawanan arah jarum jam - Relay Driver
Proses yang terjadi pada relay driver adalah proses switch tegangan. Dikarenakan tegangan raspberry pi tidak mencukupi untuk menggerakkan motor micro pump - Baterai 5 volt
- Baterai 9,6 volt
- Raspberry Pi
- Sensor proximity belakang
- Tabung penyimpanan air
- Wiper
- Motor micro pompa
- Toggle switch
- USB wireless adapter
- Motor DC 5 volt (R)
- Ban robot
- Webcam
- Set Plate
- Motor Driver
- Relay Driver
- Sensor proximity depan
- Motor DC 5 volt (L)
- Regulator Step Down
- Mulai.
- Memindai objeck.
- Jika objeck terdekteksi maka sistem melakukan proses pengiriman sinyal melalui pin yang terdapat pada raspberry.
- Baca sensor proximity dari pin input 2 dan 3
- Jika pin output 17&23 bernilai high dan pin output 18&24 bernilai maka Motor R/L bergerak forward.
- Jika pin output 17&23 bernilai low dan pin output 18&24 bernilai high maka pada Motor R/L bergerak Reverse
- Jika pin out put 17, 18,23 dan 24 bernilai low maka motor stop
- Selesai
- .Start
- Baca Sensor Proximity.
- Motor pompa setting awal kondisi high.
- Jika sensor depan aktif maka motor pompa off.
- selesai.
- Form Login
Untuk segi keamanan penulis membuat form login, dalam pembuatan form login membutuhkan beberapa activity yaitu panel, label, txt, image, dan cmd. - Form Kontrol
Untuk pengontrolannya penulis membuat agar user tidak kesulitan dalam mengoperasikannya, untuk itu penulis hanya membuat satu buah button yang berfungsi sebagai tombol start yang juga berfungsi sebagai tombol stop, tampilan layar webcam untuk monitoring, menu about dan exit. - Form About
Penulis membuat form about yang di dalam nya berisi foto penulis. - Mulai
- Tampilan Form Login
- Isi form login, masukan user name beserta password
- Jika user name terisi dan password tidak terisi, akan menampilkan pesan “ Maaf, Password tidak boleh kosong “.
- Jika password terisi dan user name tidak terisi, akan menampilkan pesan “ Maaf User name tidak boleh kosong “.
- Jikan user name atau password salah atau keduanya salah, akan menampilkan pesan “ User name atau Password anda salah”
- Jika user name dan password sesuai, akan masuk ke form control
- Selesai
- Terlebih dahulu buat IDE Basic4android
- Setelah itu muncul tampilan utama Basic4android seperti pada gambar 3.24. berikut ini, kemudian penulis menuliskan coding program pada IDE Basic4android.
- Setelah selesai menulis coding program, kemudian Save coding program. Klik File > Save, penulis menyimpan coding program pada folder botcleaner, seperti pada gambar 3.25
- Hidupkan jaringan wifi pada smart phone android dan koneksikan pada pada laptop. Penulis sebagai accsess point menggunakan router wireless, seperti pada gambar 3.26.
- Kemudian jalankan B4A-Bridge pada smartphone Android. Ada 2 pilihan: Tombol Start – Wireless dan Tombol Start – Bluetooth. Penulis menekan tombol Start – Wireless. Muncul tampilan untuk mengetik IP Address. Penulis menggunakan. IP address 192.168.0.101.
- Setelah IP Address-nya terhubung, maka otomatis B4A-Bridge pada IDE Basic4Android dan Smartphone Android berstatus “Connected” seperti pada gambar 3.28.
- Klik menu Designer pada Basic4Android, pada tool ini kita dapat membuat layout, untuk kontrol pada robot penulis membuat beberapa layout, diantarnya layout untuk login, layout untuk control dan layout about.
- Setelah proses pemograman dan desain layout selesai, compile file, karna smart phone masih terhubung dengan laptop maka hasil complie akan terkirim pada smart phone
- Install aplikasi Bot cleaner
- Icon Aplikasi Botcleaner, Setelah terinstal maka akan muncul icon aplikasi botcleaner seperti pada gambar 3.31.
- Setup Network
- Double click pada icon Wifi Config, maka akan terbuka layar tampilan wpa_gui
- Click scan, untuk menemukan router yang akan dijadikan sebagai accsess point, pada gambar 3.35, terdeteksi TP-Link_686164, dengan IP address yang didapat untuk Raspberry pi 192.168.0.101
- Click connect
- Setting SSH (Secure Shell)
- Instal MJPG Streamer
- Install versi terbaru
- Buat folder untuk menyimpan file MJPG Streamer
- Install MJPG Stremer dengan memasukkan link alamat berikut ini
- Buat project MJPG Streamer
- Hubungkan webcam pada Raspberry Pi
- Untuk melihat hasil install MJPG Streamer dengan cara masukan IP Raspberry pi bererta portnya pada kolom alamat browser (192.168.0.101:8090). Jika terinstall dengan benar akan menampilkan tampilan seperti pada gambar. 3.37.
- Pengujian Keamanan Sistem
- Pengujian Tampilan Layar
- Pengujian Motor DC
- Pengujian Motor Micro Pump
- Pengujian Webcam
- Pengujian Sensor Proximity
- Point (1) adalah beterai dengan kapasitas 10.000 mAh diperuntukan untuk mensaplai power raspberry pi yang secara tidak langsung juga mensuplai tegangan pada Web Cam, dan USB Wireless Adapter.
- Point (2) adalah baterai dengan kapasitas 700 mAh diperuntukan untuk mensuplai tegangan kerja motor DC, Sensor Proximity dan relay.
- Hasil pengukuran antara point (3/GND) dengan point (4) yang merupakan keluaran langsung dari baterry 700 mAh adalah sebesar 9,5 volt berupa tegangan DC.
- Hasil pengukuran antara point (3/GND) dengan point (5) didapatkan hasil sebesar 4,6V. Tegangan ini merupakan keluaran dari Driver Board L298.
- Hasil pengujian pada saat point (8 / logika 0) dan point (7/ logika 0). Maka output yang dihasilkan point (1) dan point (2) adalah Low yang berarti motor DC kanan tidak berputar.
- Hasil pengujian pada saat point (8/ logika 1) dan point (7/ logika 0). Maka output yang dihasilkan point (1/ high) dan point (2/ low) yang menandakan motor DC kanan berputar berlawanan arah jarum jam.
- Hasil pengujian pada saat point (8/ logika 0) dan point (7/ logika 1). Maka output yang dihasilkan point (1/ low) dan point (2/ high) yang menandakan motor DC kanan berputar searah jarum jam.
- Hasil pengujian pada saat point (6 / logika 0) dan point (5/ logika 0). Maka output yang dihasilkan point (3) dan point (4) adalah Low yang berarti motor DC kiri tidak berputar.
- Hasil pengujian pada saat point (6/ logika 1) dan point (5/ logika 0). Maka output yang dihasilkan point (3/ high) dan point (4/ low) yang menandakan motor DC kiri berputar berlawanan arah jarum jam.
- Hasil pengujian pada saat point (6/ logika 0) dan point (5/ logika 1). Maka output yang dihasilkan point (3/ low) dan point (4/ high) yang menandakan motor DC kiri berputar searah jarum jam.
- Hasil pengujian pada saat point (1 / 4, source DC) dan point (2/ GND). Maka output yang dihasilkan point (1 / 4) dan point (2) adalah tegangan suplai 9,5 Volt DC.
- Hasil pengujian pada saat point (3/ high). Maka output yang dihasilkan relay on.
- Hasil pengujian point (5 / output motor pump) dilakukan pada saat relay on. Maka output yang dihasilkan, motor micro pump berputar.
- Untuk sumber tegangan Point (1/GND) dan Point (2/+ 4,6 volt) di dapat dari output Driver Board L298.
- Pada saat sensor proximity dalam keadaan tidak aktif yaitu tidak ada objeck penghalang maka pengukuran pada point (1/GND) dengan point (3/ output sensor) adalah sebesar 3,4 volt yang menandakan logika 1.
- Pada saat sensor proximity dalam keadaan aktif yaitu dengan adanya objeck penghalang maka pengukuran pada point (1/GND) dengan point (3/ output sensor) adalah sebesar 0,0 volt yang menandakan logika 0 .
- Status pin posisi robot forward
- Status pin posisi posisi robot reveres
- Status pin posisi robot home
- User name tidah terisi dan password terisi, maka akan menampilkan pesan error seperti pada gambar 4.8
- User name terisi dan password tidak terisi, maka akan menampilkan pesan error seperti pada gambar 4.9
- User name tidah terisi dengan benar dan password tidak terisi dengan benar, maka akan menampilkan pesan error, seperti pada gambar 4.10
- Start.
- Webcam ON.
- Inisialisasi Pin.
- Posisi default pin output
- Check status pin input 3.
- Check status pin input 2.
- End.
- Setup Pin GPIO.
Listing program ini untuk menentukan pin GPIO pada raspberry pi apakah sebagai input atau sebagai output : - Label masing – masing pin GPIO Raspberry pi.
Listing program ini adalah memberikan lebel nama dan posisi default masing – masing pin : - Berikut ini adalah sub rutin control Bot Cleaner, pada sub rutin ini dibagi beberap sub yaitu sub rutin untuk kontrol robot maju, sub rutin untuk kontrol robot mundur dan sub rutin untuk control robot stop).
- Perintah kontrol robot
- Listing program menu login
- Listing program kontrol
- Listing program about
- Tampilan Layar Login
- Tampilan Layar Kontrol
- Tampilan About
- Observasi
Melakukan pengamatan dan pemahaman yang didapat di lapangan untuk mengetahui proses pengerjaan dan memperoleh data dan informasi tentang jenis bahan atau peralatan apa saja yang dibutuhkan, dilakukan selama 2 minggu. - Pengumpulan data
Proses pengumpulan data dilakukan untuk mencari sumber dan mengetahui beberapa teori yang digunakan dalam pembuatan robot dilakukan selama 2 minggu. - Perancangan sistem
Dalam perancangan robot pembersi panel solar cell terbagi menjadi dua, perancangan hardware dan software merupakan proses yang dilakukan seorang peneliti agar dapat menghasilkan suatu rancangan yang mudah dipahami oleh user. Perancangan sistem dilakukan selama 3 minggu. - Test sistem
Pengetesan sistem kendali robot dilakukan untuk mengetahui kesalahan-kesalahan yang ada, dan untuk memastikan pemasangan hardware dan Software. Pengetesan dilakukan selama 1 minggu. - Evaluasi sistem
Untuk mengetahui kesalahan dan kekurangan baik dari segi pergerakan robot maupu dari segi program program yang dibuat maka perlu dilakukan evaluasi program, kegiatan ini dilakukan selama 1 minggu. - Perbaikan sistem
Penambahan atau pengurangan pada point-point tertentu yang tidak diperlukan, sehingga kinerja robot dapat dioptimalkan sesuai kebutuhan user. Perbaikan program dilakukan selama 1 minggu. - Implementasi
Setelah diketahui kelayakan dari cara kerja robot yang dibuat, maka akan dilakukan implementasi program. Dan implementasi program dilakukan selama 2 minggu bersamaan dengan training user. - Training user
Training user diperlukan untuk memperkenalkan sistem control dan pengoperasian pada robot pembersih panel solar cell, bertujuan agar user dapat melakukan control terhadap robot, proses training user dilakukan selama 2 minggu - Dekumentasi program
- Sistem yang dibuat didokumentasikan selama penelitian dan perancangan berlangsung. Untuk lebih jelas dapat dilihat pada tabel 4.10.
- Dengan ketersediaan dua buah sensor pada robot dengan fungsi yang berbeda dan memberikan logika satu atau nol pada raspberry pi, membuat robot dapat bekerja secara otomatis.
- Agar robot dapat berkomunikasi dengan smart phone, maka dibutuhkan router wifi sebagai access point, selama robot dan smart phone dalam satu class maka keduanya dapat berkomunikasi.
- Pada pin GPIO raspberry Pi terdapat dua buah Input menggunakan sensor proximity, dan terdapat tiga buah output, yaitu dua buah motor DC dan satu buah motor micro pump. Keseluruhan komponen tersebut dapat bekerja secara kompak dengan menggunakan bahasa pemograman python yang mengatur alur kerja dari masing – masing komponen.
- Robot pembersih panel solar cell ini dapat meringankan pekerjaan manusia, khususnya dalam membersihkan panel solar cell.
- Ketersedian Webcam pada robot membatu dalam memonitoring kondisi panel solar cell secara real time.
- Dengan penggunaan aplikasi android sebagai interface, sehingga robot dapat dikendalikan melaui smart phone.
- Bahwa robot pembersih panel solar cell belum pernah ada pada PT. langgeng Baja Pratama.
- Dalam Perancangan Robot pembersih panel solar cell panel, penulis menggunakan DFD, Flowchart, dan diagram block yang sangat membantu dalam prosesn pembuatan robot.
- Dalam uji coba kerja robot dapat bekerja dengan baik dan sesuai yang diharapkan.
- Sebaiknya robot mendapat access internet sehingga dapat dikendalikan dari mana saja selama robot terhubung dengan internet
- Sebaiknya tabung penyimpanan air diberi sensor level sehingga robot dapat memberikan informasi kepada user, apakah air yang terdapat didalam sudah habis atau belum.
- Mendapatkan banyak .ilmu pengetahuan yang tidak didapat dalam perkuliahan
- Belajar bagaimana menanggapi permasalahan dilingkungan masyarakat dan memberikan alternatif solusi terhadap permasalahan yang ada dibidang teknologi, khususnya dalam sistem kendali otomatis
- Menabah wawasan dalam bidang sistem kendali otomatis dan robotika,
- ↑ 1,0 1,1 1,2 1,3 1,4 Budiharto,159. Membuat Sendiri Robot Cerdas Edisi Revisi. Jakarta: Elex Media Komputindo.
- ↑ Bolton,1. Programmable Logic Control (PLC. Jakarta : Erlangga.
- ↑ Petruzella dalam Drs.Sumanto.MA . 2001.Elektronik Industri. Yogyakarta: CV. Andi Offset.
- ↑ 4,0 4,1 4,2 Halim.St,1. Merancang Mobile Robot Pembawa Objeck. Jakarta: Elex Media Komputindo.
- ↑ 5,0 5,1 5,2 5,3 Simarmata,62.Rekayasa Perangkat Lunak. Yogyakarta: Andi Offset.
- ↑ 6,0 6,1 6,2 Sofana,3.Jaringan Komputer. Bandung :Informatika.
- ↑ Syafrizal,2.Pengantar Jaringan Komputer. Yogyakarta: Andi Offset.
- ↑ Dewobroto,12. Aplikasi Rekayasa Kontruksi dengan Visual basic 6.0. Jakarta: Elex Media Komputindo.
- ↑ 9,0 9,1 9,2 Raharjo,22.Logika Algoritma dan Implementasi dalam bahasa Phyton di GNU/Linux. Yogyakarta: Andi Offset
- ↑ Kusrini,80.Tuntunan Praktis Membangun Sistem Informasi Akutansi dengan Visual Basic dan Microsoft SQL Server. Yogyakarta: Andi Offset.
- ↑ 11,0 11,1 11,2 Fatta,119. Analisis dan Perancangan Sistem Informasi. Yogyakarta : Andi Offset.
- ↑ Guritno,302. Theory and Application of IT Research Metodologi Penelitian Teknologi Informasi. Yogyakarta : Andi Offset.
- ↑ 13,0 13,1 Frank D.Petruzella dalam Drs. Sumanto.MA,158.Elektronik Industri. Yogyakarta:Andi Offset.
- ↑ Wahadyo,2.Android 4 untuk Pengguna Pemula Tablet & Handphone. Ciganjur: Mediakita.
- ↑ Jubilee,2. Step bay Step Ponsel Android. Jakarta: Elex Media Komputindo.
- ↑ Budiharto,86. Theory and Application of IT Research Metodologi Penelitian Teknologi Informasi. Yogyakarta. Andi Offset.
Manfaat Penelitian
Adapun manfaat yang dihasilkan dari penelitian ini adalah :
Metode Penelitian
Metode Pengumpulan Data
Metode Analisa
Pada metode ini penulis menganalisa terhadap kebutuhan sistem. bagaimana sensifitas, flexibilitas dan fungsi utama pada sistem kendali Robot Pembersih Panel Solar Cell mengunakan Mini PC Raspberry dengan komunikasi melalui WIFI. Pengumpulan data di dapat dengan melakukan wawancara dengan user atau study literature. Penulis menggali informasi sebanyak – banyaknya dari user sehingga akan tercipta sebuah sistem computer yang bisa melakukan tugas – tugas yang diinginkan oleh user. Tahapan ini akan menghasilkan dokumen user requirement atau bisa dikatakan sebagai data yang berhubungan dengan keinginan user dalam pembuatan sistem. Dokumen ini lah yang akan menjadi acuan sistem analisa untuk menerjemahkan kedalam bahasa pemograman.
Metode Perancangan
Merancang model atau prototype dengan berbagai bahan dasar dari beberapa komponen pendukung, instalasi software dan pemasangan komponen lain menjadi satu kesatuan. Dalam proses perancangan sangat penting untuk mengetahui berapa jumlah input dan output yang dibutuhkan pada prototype robot agar pada saat pemograman, input dan output yang tersedia sesuai dengan coding program yang dibuat. Proses perancangan suatu prototipe akan menerjemahkan syarat kebutuhan sebuah perancangan perangkat keras maupun perangkat lunak yang dapat diperkirakan sebelum proses pembuatan prototipe dan dalam proses pembuatan coding program.
Metode Prototipe
Agar User dapat menilai dari spesifikasi fungsional, bagaimana sistem berlaku atau bekerja maka dibutuhkannya metode prototipe. Jika perubahan diperlukan prototipe dapat dimodifikasi, memungkinkan dimodifikasi beberapa kali sampai keadaan yang ditetapkan user. Metode ini sering digunakan pada dunia rill. Karna metode ini secara keseluruhan akan mengacu kepada kepuasan User. Bisa dikatakan bahwa metode ini merupakan metode Waterfall yang dilakukan secara berulang – ulang.
Metode Testing
Tahapan ini yang merupakan tahapan secara nyata dalam mengerjakan suatu sistem. Setelah perangkat keras sudah menjadi satu kesatuan dan pengkodean selesai, maka akan dilakukan testing terhadap sistem yang telah dibuat sebelumnya. Tujuan testing menemukan kekurangan – kekurangan terhadap sistem tersebut dan kemudian bisa diperbaiki. Pada metode testing ini penulis menggunakan Metode Black Box pada sistem yang akan penulis bangun, dalam pengertianya Black Box adalah pengujian untuk mengetahui apakah semua fungsi dari perangkat keras maupun perangkat lunak telah berjalan semestinya sesuai dengan kebutuhan fungsional yang telah didefinisikan.
Metode Black Box memungkinkan perekayasaan perangkat lunak mendapatkan serangkaian kondisi input yang sepenuhnya mengunakan semua persyaratan fungsional untuk suatu program.
Black Box dapat menemukan kesalahan dalam kategori berikut :
Sistematika Penulisan
Penulisan skripsi ini terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub – sub bab yang akan membahas dan menguraikan masalah yang lebih terperinci. Secara garis besar isi dari bab – bab penulisan skripsi ini adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisi tentang uraian latar belakang, perumusan masalah, ruang lingkup penelitian, tujuan dan manfaat penelitian, metode penelitian dan sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini menjel Bab ini berisi tentang uraian mengenai teori umum, teori khusus dan spesifikasi komponen guna mendukung pembahasan masalah yang berkaitan dengan judul penelitian.
BAB III PERANCANGAN DAN PEMBAHASAN
Bab ini berisi tentang gambaran umum tentang prototipe Robot Pembersih Panel Solar Cell meliputi gambaran umum perusahaa, tata laksana sistem yang berjalan, analisa sistem yang berjalan, konfigurasi sistem yang berjalan, permasalahan yang dihadapi dan alternative pemecahan masalah, dan user requirement.
BAB IV UJI COBA DAN ANALISA
Bab ini penulis menguraikan sistem yang akan diusulkan seperti perancangan program, flowchart program, testing, evaluasi, implementasi dan estimasi biaya.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan bab penutup yang berisi tentang kesimpulan dan saran dari hasil pengamatan dan penelitian dalam pembuatan prototipe robot pembersih panel solar cell.
BAB II
Teori Umum
Konsep Dasar Panel solar Cell
Solar panel atau solar module atau orang indonesia biasa menyebutnya panel surya adalah komponen terpenting dari Pembangkit Listrik Tenaga Surya (PLTS). Solar panel mengkonversi tenaga matahari menjadi listrik. Solar panel terdiri dari sejumlah photovoltaic adalah teknologi yang berfungsi untuk mengubah atau mengkonversi radiasi matahari menjadi energi listrik secara langsung. PV biasanya dikemas dalam sebuah unit yang disebut modul. Dalam sebuah modul surya terdiri dari banyak sel surya yang bisa disusun secara seri maupun paralel. Sedangkan yang dimaksud dengan surya adalah sebuah elemen semikonduktor yang dapat mengkonversi energi surya menjadi energi listrik atas dasar efek fotovoltaik. Solar cell mulai popular akhir-akhir ini, selain mulai menipisnya cadangan enegi fosil dan isu global warming. energi yang dihasilkan juga sangat murah karena sumber energy (matahari) bisa didapatkan secara gratis.
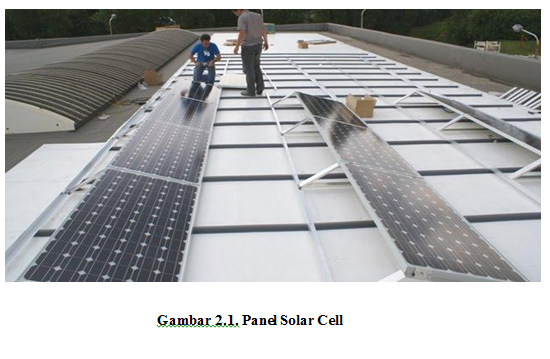
Sistem Kontrol
Menurut Budiharto (2008:159)[1], “sistem control dapat dibayangkan sebagai sebuah kotak hitam yang digunakan untuk mengontrol output untuk nilai tertentu atau urutan nilai tertentuseperti ilustrasi pada gambar 2.2 ”.
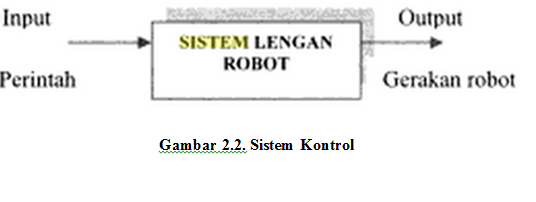
Menurut Bolton (2004:1)[2],"sistem control adalah suatu sistem yang mengontrol serangkaian kejadian atau mempertahankan agar sejumlah varibel tetap bernilai tetap atau melakukan suatu perubahan yang telah ditetapkan sebelumnya".
Berdasarkan definisi tersebut dapat disimpulan sistem control adalah sebuah sisitem yang terdiri dari input proses dan output proses yang dapat dikontrol. Dalam aplikasinya, sistem kontrol memegang peranan penting dalam teknologi. Sebagai contoh, otomatisasi industri dapat menekan biaya produksi, mempertinggi kualitas, dan dapat menggantikan pekerjaan-pekerjaan rutin yang membosankan. Sehingga dengan demikian akan meningkatkan kinerja suatu sistem secara keseluruhan, dan pada akhirnya memberikan keuntungan bagi manusia yang menerapkannya.
Menurut Petruzella dalam Drs.Sumanto.MA (2001:563)[3],sistem kontrol dapat diklasifikasikan sebagai loop membuka dan loop tertutup.
Pengontrolan tidak menerima sistem informasi berkaitan status sekarang dari proses atau keperluan untuk setiap aksi pembetulan. Gambar 2.3 melukiskan sistem control loop membuka.
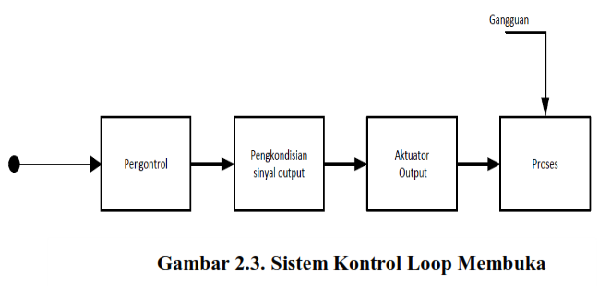
Sistem pada output proses yang mempengaruhi input. Sistem tersebut mengukur output yang sesungguhnya dari proses dan membandingkannya dengan output yang dikehendaki. Gambar 2.4 melukiskan sistem control loop tertutup.
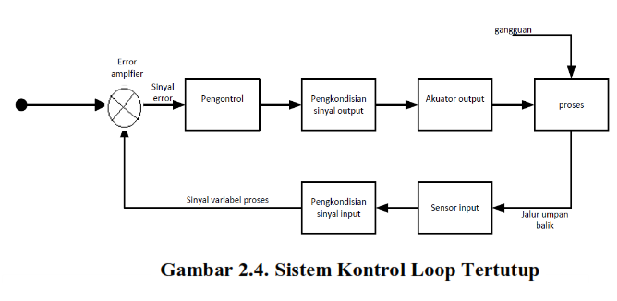
Konsep Dasar Pengontrolan Jarak Jauh
Pengontrolan jarak jauh dapat diartikan sebagai sistem yang mampu melakukan proses kontrol atau kendali terhadap suatu piranti yaitu mampu untuk mengaktifkan dan menonaktifkan piranti tersebut serta dapat mengetahui kondisi sebenarnya dari piranti tersebut. Maka dapat disimpulkan ada status dari setiap piranti yang dipantau setelah dikirimkannya suatu perintah atau intruksi. Pengontrolan terhadap suatu piranti dapat dilakukan dari jarak dekat yaitu dengan mengaktifkan dan menonaktifkannya secara manual dan juga dapat dilakukan dari jarak jauh dengan menggunakan remote control maupun dengan menggunakan suatu perangkat lunak yang mampu mengontrol alat – alat elektronik dengan berbagai macam gerak dengan sistem kerja yang kompleks.
Kebutuhan akan sistem kendali jarak jauh semangkin meningkat sejalan dengan era globalisasi. Rutinitas perkerjaan manusia yang dituntut semakin cepat dan efisien membutuhkan suatu sistem pengontrolan jarak jauh yang dapat mengontrol piranti dari mana saja. Suatu sistem jaringan computer merupakan solusi untuk menghubungkan antara pengontrol dengan piranti yang di control. Konsep lan nirkabel (WiFi) digunakan sebagai mode untuk menghubungkan antara dua buah computer atau lebih. komputer server menggunakan sebuah mini PC Raspberry Pi sebagai computer control yang dapat mengontrol piranti dengan menggunakan program pengontrolan, dengan bantuan jaringan nirkabel (WiFi) raspberry Pi dapat melakukan pengontrolan dari jarak jauh.
Konsep Dasar Sistem Robotika
Perkembangan robotika pada awalnya bukan dari disiplin elektronika melainkan berasal dari ilmuwan biologi dan pengarang cerita novel maupun pertunjukan drama pada sekitar abad XVIII. Kata robot pertama kali diperkenalkan oleh seorang penulis dari Czech yang bernama wright Karel Capek pada tahun 1921. Kata Robot berasal dari kata ‘robota’ yang berarti: pekerja Paksa atau Sendiri.
Menurut Halim.St(2007:1)[4], “Robot adalah peralatan elektro-mekanik atau bio-mekanik, atau gabungan peralatan yang menghasilkan gerakan otonomi maupun berdasarkan gerakan yang diperintahkan”.
Menurut Budiharto (2009:2)[1], “Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefinisikan terlebih dulu ( kecerdasan buatan )”.
Berdasarkan beberapa definisi tersebut dapat disimpulkan bahwa robot adalah suatu suatu alat yang bergerak secara otomatis yang di dalamnya sudah tertanam seatu embedded system.
Menurut Halim.St(2007:5)[4],“Robot berdasarkan mobilitasnya terbagi dalam dua kelompok. Kelompok yang pertama merupakan robot yang dioperasikan pada lingkungan yang tetap dengan pergerakan yang cenderung tetap dan tertentu (sebagai robot industry/stationary robot). Pada kelompok yang kedua, robot dapat bergerak secara otonomi, memiliki navigasi, dan pergerakannya tidak tetap. Tergantung dari medan jelajah( dikenal dengan mobile robot)”.
Disain mobile robot dapat bergerak menggunakan kaki (leg robot), roda (wheel robot), dan tank. Robot biasanya digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor. Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan tolong" (search and rescue), dan untuk pencarian tambang. Robot yang menggunakan peralatan komunikasi dimungkinkan untuk dikendalikan oleh manusia, seperti lengan robot yang pengendaliannya dilakukan melalui computer.
Menurut Halim.St(2007:6)[4],berdasarkan dari sisitem gerak robot dapat dikatagorikan sebagai berikut:
Selain dari sistem pergerakan hal yang tidak kalah penting adalah dalam pemilihan material karna cukup berpengaruh terhadap kontruksi robot seperti berat, kekuatan, serta ketahanan terhadap keretakan. Material yang dapat digunakan antarlain plastik, logam, dan kayu. Padukanlah material yang ada, cari kontruksi robot yang kuat, ringan serta dapat meredam getaran. Berikut ini adalah material yang dapat digunakan untuk membuat suatu robot.
Material logam juga digunakan untuk pembuatan kontruksi robot seperti besi, besi karbonit, alumunium, stainless steel. Material besi kokoh, dapat dipotong, dibentuk, dilubangi secara presisi dan dapat berkarat pada suhu yang lembab. Karbonit memiliki struktur kekerasan yang lebih kuat dari pada besi biasa. Alumunium merupakan material logam yang ringan namun kuat, dapat dibentuk, dipotong dan dilubangi. Material stainless steel memiliki struktur yang keras, dapat dibentuk maupun dilubangi dan tahan terhadap karat. Material logam dapat digunakan untuk roda, dudukan motor DC, atau sebagai kopling antara motor dengan roda.
Konsep Dasar Prototipe
Menurut Simarmata(2010:62)[5], “Sebuah prototipe adalah bagian dari produk yang mengekspresikan logika maupun fisik antarmuka eksternal yang ditampilkan".
Prototipe merupakan bentuk awal (contoh) atau standar ukuran dari sebuah entitas. Dalam desain, sebuah prototipe dibuat sebelum dikembangkan atau justru dibuat khusus untuk pengembangan sebelum dibuat dalam skala sebenarnya atau sebelum diproduksi secara massal.Dalam menyelesaikan project software akan terdapat satu pendapat bahwa masalah pertama adalah memperoleh kebutuhan dari user. Permasalahan kedua adalah berdasarkan persetujuan spesifikasi fungsional. Spesifikasi fungsional mencoba untuk menggambarkan sistem yang berbasis grafik dan narasi, tetapi gambar dan penjelasan tidak dapat menerangkan cara sistem tersebut berjalan, berlaku, dan mempengaruhi bisnis user. Sebagai tambahan, spesifikasi fungsional biasanya menimbulkan kesalah pahaman.
Menurut Simarmata(2010:63)[5], Pendekatan prototipe pada umumnya dan melibatkan beberapa langkah berikut :
Menurut Simarmata(2010:64)[5], Pendekatan pengembangan prototipe meliputi :
Menurut Simarmata(2010:158)[5], Sub –sub bagian prototipe meliputi metode yang menyertakan perangkat lunak dan dibagi lagi kedalam :
Keuntungan dari prototipe :
Kekurangan dari prototipe :
Konsep Dasar Jaringan
Menurut Sofana (2008:3)[6],"Membangun jaringan komputer (computer networks) adalah suatu himpunan interkoneksi sejumlah computer autonomous".
Menurut Syafrizal (2005:2)[7],"jaringan computer adalah himpunan “interkoneksi” antara 2 komputer autonomous atau lebih yang terhubung dengan media transmisi kabel atau tanpa kabel (wireless)".
Berdasarkan definisi tersebut dapat diambil kesimpulan jaringan computer adalah kumpulan komputer yang saling berhubungan. Dalam bahasa yang populer dapat dijelaskan bahwa jaringan komputer adalah kumpulan beberapa computer dan perangkat lain yang saling terhubung satu sama lain melalui media perantara. Media perantara ini bias berupa media kabel ataupun media tanpa kabel (nirkabel). Informasi berupa data akan mengalir dari satu komputer ke komputer lainnya atau dari satu komputer keperangkat yang lainnya, sehingga masing – masing computer yang terhubung tersebut bias saling bertukar data atau berbagi perangkat keras.
Menurut Sofana (2008:4)[6],Jaringan komputer dibagi berdasarkan beberapa klasifikasi, yaitu :
Konsep Dasar Internet Protokol
Menurut Sofana (2008:93)[6],"IP adalah protokol yang mengatur bagaimana yang mengatur suatu data dapat dikenal dan dikirim dari suatu computer ke computer lain".
Internet protocol (IP) berada pada layer internetwork atau internet. IP merupakan kunci dari jaringan TCP/IP, agar dapat berjalan dengan baik maka semua aplikasi jaringan TCP/IP pasti bertumpu kepada internet protocol. IP bersifat connectionless protocol, ini berarti IP tidak melakukan error detection dan error recovery. IP tidak dapat melakukan handshake (pertukaran control informasi) saat membangun sebuah koneksi, sebelum data dikirim.
Protokol IP memiliki fungsi utama yaitu :
IP juga didesain dapat melewati berbagai media komunikasi yang memiliki karakteristik dan kecepatan yang berbeda – beda. Pada jaringan Ethernet, panjang satu datagram akan lebih besar dari panjang datagram pada jaringan public yang menggunakan media jaringan telepon, atau pada jaringan wireless. Perbedaan ini semata – semata untuk mencapai throughput yang baik pada setiap media. Pada umumnya, semakin cepat kemampuan transfer data pada media tersebut, semakin besar panjang datagram maksimum yang digunakan. Protokol IP juga dikenal sebagai best effort protocol. Hal ini karena IP tidak memberi jaminan bahwa suatu datagram akan sampai ketujuan dengan selamat. IP hanya memberi jaminan untuk melakukan usaha terbaik (best effort) agar datagram dapat sampai ketujuan. Suatu datagram bisa saja tidak sampai dengan selamat ketujuan karna beberapa hal berikut :
Transmission Control Protocol (TCP) dan User Datagram Protocol (UDP) merupakan dua protokol terpenting dalam layer transport. TCP merupakan protokol yang bersifat connection oriented. TCP menyediakan layanan pengiriman data yang connection oriented, reliable, byte stream service. Connection oriented berarti dua aplikasi pengguna TCP harus melakukan pembentukan hubungan dalam bentuk pertukaran kontrol informasi (hand shaking), sebelum transmisi data terjadi. Reliable berarti TCP menerapkan proses deteksi kesalahan paket dan retransmisi. Byte stream service berarti paket dikirim dan sampai ketempat tujuan secara berurutan. Sedangkan UDP menyediakan layanan pengiriman datagram yang bersifat connection oriented, tanpa dilengkapi deteksi dan koreksi kesalahan. Kedua protokol ini mengirimkan data antara layer application dan layer internet.
TCP merupakan bagian dari protokol TCP/IP yang digunakan bersama dengan IP untuk mengirim data. Pengiriman data dapat dijamin, karna TCP mengandalkan dua proses data acknowledgement yaitu retransmisi dan sequencing. Protokol TCP bertanggung jawab untuk pengiriman data dari sumber ketujuan dengan benar. TCP juga betugas mendeteksi kesalahan atau hilangnya data dan melakukan pengiriman kembali sampai data diterima dengan lengkap. TCP selalu meminta konfirmasi setiap kali selesai mengirim data. Kemudian TCP akan mengirim data urutan berikutnya atau melakukan retransmission (pengiriman ulang data).
Setiap komputer yang hendak bergabung dengan internet harus memiliki suatu alamat yang unik. IP address adalah sekumpulan bilangan biner sepanjang 32 bit, yang dibagi atas 4 segmen dan setiap segmen terdiri dari 8 bit. IP address merupakan identifikasi setiap host pada jaringan internet. Secara teori, tidak boleh ada dua host atau lebih yang bergabung ke internet menggunakan IP address yang sama. Untuk memudahkan pengaturan IP address seluruh computer pengguna jaringan internet, dibentuklah suatu badan yang mengatur pembagian IP address. Badan tersebut Inter NIC (Internet Network Information Center).
Inter Nic membagi IP address menjadi beberapa kelas. Untuk lebih jelasnya dapat dilihat pada tabel 2.1 :
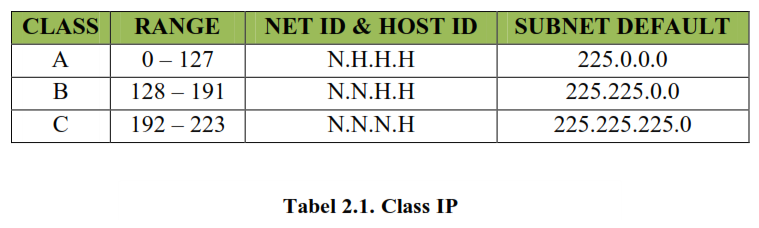
IP address kelas A, B ,C selalu dapat dibagi menjadi dua bagian yaitu network dan host. Dalam praktiknya, sebuah host tidak pernah berdiri sendiri namun memerlukan host lain dan bergabung membentuk sebuah network. Setiap network yang bergabung di internet haruslah memiliki ID yang unik, yang disebut alamat network atau network address.
Berikut ini adalah struktur dari kelas IP address :
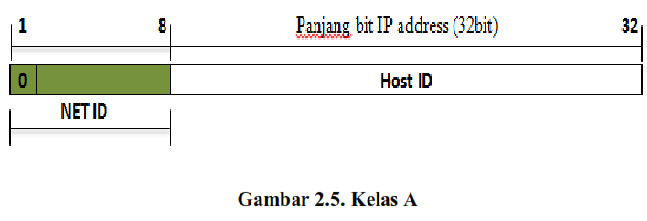
Keterangan :
Bit pertama dari IP address adalah 0 maka IP address termasuk kelas A. bit ini dan 7bit berikutnya ( 8 bit pertama ) merupakan bit – bit network ( network ID ) dan boleh bernilai berapa saja ( kombinasi angka 1 dan 0 ), sedangkan 24 bit terakhir merupakan Host ID.
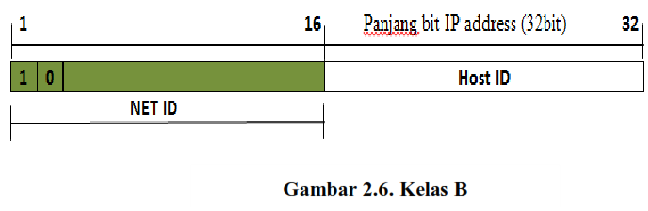
Keterangan :
bit pertama dari IP address adalah 1.0, maka IP address termasuk dalam network kelas B. dua bit ini dan 14 bit berikutnya (16 bit pertama ) dan boleh bernilai berapa saja ( kombinasi angka 1 dan 0), sedangkan 16 bit terakhir merupakan Host ID
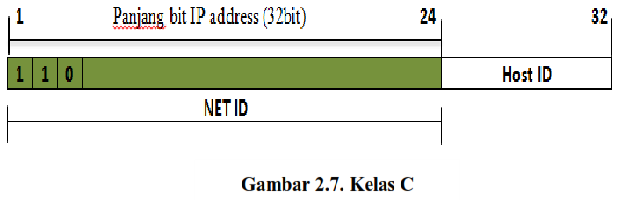
Keterangan :
Tiga bit dan 21 bit berikutnya ( 24 bit pertama ) merupakan Net ID dan boleh benilai berapa saja ( kombinasi angka 1 dan 0 ), sedangkat 8 bit terakhir merupakan Host ID.
Access Point
Access Point digunakan untuk melakukan pengaturan lalu lintas jaringan dari mobile radio ke jaringan kabel atau backbone jaringan wireless client/server. Access Point dapat dianalogikan dengan hub dan repeater pada wired LAN, hanya saja digunakan pada wireless LAN. Access Point juga dapat menghubungkan wireless LAN dengan wired LAN dan dapat memperbesar jangkauan WLAN.
Pada umumnya Access Point dibuat dengan kemampuan tambahan, seperti :
Konsep Dasar DHCP
Dynamic Host Configuration Protocol atau yang biasa dikenal dengan DHCP adalah layanan pemberian nomor IP secara otomatis yang diberikan kepada komputer-komputer yang membutuhkan. Komputer yang memberikan IP (Internet Protocol) kepada komputer yang meminta disebut dengan DHCP Server, sedangkan yang dipinjamkan sebuah nomor IP disebut dengan DHCP Client. Pada sistematis DHCP, Nomor IP yang diberikan kepada client tidaklah permanen artinya DHCP Server hanya meminjamkan nomor IP kepada Client dan apabila nomor tersebut sudah tidak diperlukan maka IP tersebut akan dikemabalikan kepada server.
Adapun 3 metode untuk pengalokasian alamat IP pada DHCP server :
Karena DHCP merupakan sebuah protokol yang menggunakan arsitektur client/server, maka dalam DHCP terdapat dua pihak yang terlibat, yakni DHCP Server dan DHCP Client.
DHCP Server umumnya memiliki sekumpulan alamat yang diizinkan untuk didistribusikan kepada client, yang disebut sebagai DHCP Pool. Setiap client kemudian akan menyewa alamat IP dari DHCP Pool ini untuk waktu yang ditentukan oleh DHCP, biasanya hingga beberapa hari. Manakala waktu penyewaan alamat IP tersebut habis masanya, client akan meminta kepada server untuk memberikan alamat IP yang baru atau memperpanjangnya.
DHCP Client akan mencoba untuk mendapatkan "penyewaan" alamat IP dari sebuah DHCP server dalam proses empat langkah berikut:
Kemudian, DHCP Server akan menetapkan sebuah alamat kepada client, dan memperbarui basis data database miliknya. Client selanjutnya akan memulai proses binding dengan tumpukan protokol TCP/IP dan karena telah memiliki alamat IP, client pun dapat memulai komunikasi jaringan. Empat tahap di atas hanya berlaku bagi client yang belum memiliki alamat. Untuk client yang sebelumnya pernah meminta alamat kepada DHCP server yang sama, hanya tahap 3 dan tahap 4 yang dilakukan, yakni tahap pembaruan alamat (address renewal), yang jelas lebih cepat prosesnya. Berbeda dengan sistem DNS yang terdistribusi, DHCP bersifat standalone, sehingga jika dalam sebuah jaringan terdapat beberapa DHCP server, basis data alamat IP dalam sebuah DHCP Server tidak akan direplikasi ke DHCP server lainnya. Hal ini dapat menjadi masalah jika konfigurasi antara dua DHCP server tersebut berbenturan, karena protokol IP tidak mengizinkan dua host memiliki alamat yang sama. Selain dapat menyediakan alamat dinamis kepada client, DHCP Server juga dapat menetapkan sebuah alamat statik kepada client, sehingga alamat client akan tetap dari waktu ke waktu.
Kelebihan DHCP :
Kekurangan DHCP :
Flowchart
Menurut Dewobroto(2005:12)[8],"Suatu flowchart atau bagan ali dapat dengan mudah menjelaskan suatu urutan – urutan proses yang relative rumit bila diuraikan dengan kata – kata".
Menurut Raharjo (2004:22)[9],"flowchart (bagan alir) merupakan grafik dari suatu algoritma atau prosedur untuk menyelesaikan suatu masalah".
Menurut Kusrini(2007:80)[10],"Bagan alir (flowchart) adalah bagan (chart) yang menunjukkan aliran (flow) di dalam program atau prosedur sistem secara logika, digunakan terutama sebagai alat bantu komunikasi dan untuk dokumentasi".
Berdasarkan definisi diatas flowchart adalah suatu bagan yang menggambarkan dan mempresentasikan suatu alur algoritma atau prosedur dalam pembuatan program.
Menurut Raharjo (2004:22)[9],Flowchart terdiri dari dua macam yaitu :
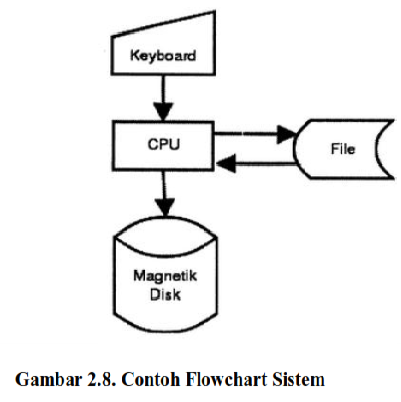
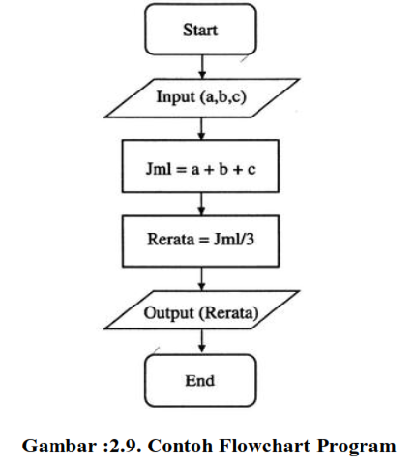
Data Flow Diagram
Menurut Fatta (2007:119)[11], “Data Flow Diagram (DFD) merupakan diagram yang digunakan untuk menggambarkan proses – proses yang terjadi pada sistem yang akan dikembangkan".
Menurut Kusrini(2007:88)[11], “Data Flow Diagram (DFD) menggambarkan arus data dari suatu sistem informasi, baik sistem lama maupun sistem baru secara logika tanpa mempertimbangkan lingkungan fisik dimana data tersebut berada. ".
Berdasarkan definisi diatas Data Flow Diagram adalah merupakan serangkaian bagan – bagan alur proses dan data yang saling berkaintan dalam suatu sistem.
Berikut ini adalah nama bagan DFD beserta fungsinya :
Dalam pembuatan diagram ada beberapa langkah – langkah yang harus dilakukan, berikut ini langkah – langkah dalam pembuatan DFD :
Metode Black Box
Metode black box adalah pengujian untuk mengetahui apakah semua fungsi perangkat lunak telah berjalan semestinya sesuai dengan kebutuhan fungsional yang telah didefinisikan. Pada metode black box memungkinkan perekayasa perangkat lunak mendapatkan kondisi input yang sepenuhnya menggunakan semua persyaratan fungsional untuk suatu program.
Pada black box dapat menemukan kesalahan dalam katagori berikut fungsi – fungsi yang tidak benar atau hilang :
Metode White Box
Menurut Sodikin (2009:Vol 5)[11],“Pengujian white box berfokus pada struktur kontrol program".
Berdasarkan definisi tersebut maka dapat disimpulkan metode white box adalah pengujian untuk memperlihatkan cara kerja dari produk secara rinci sesuai dengan spesifikasinya..Pada metode white box pengujian dilakukan dengan menggunakan struktur kontrol, oleh karna itu menggunakan white box akan dihadapkan kasus sebagai berikut ini :
Konsep Dasar Elisitasi
Menurut Guritno (2011:302)[12], “Elisitasi merupakan rancangan yang dibuat berdasarkan sistem baru yang diinginkan oleh pihak manajemen terkait dan disanggupi oleh penulis untuk dieksekusi".
Elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu:
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu:
Teori Khusus
Mikroprosesor ARM
Arsitektur ARM (Advance RISC Machine), merupakan arsitektur prosesor 32-bit RISC yang dikembangkan oleh ARM Limited. Dikenal sebagai Advanced RISC Machine dimana sebelumnya dikenal sebagai Acorn RISC Machine. Pada awalnya merupakan prosesor desktop yang sekarang didominasi oleh keluarga x86. Namun desain yang sederhana membuat prosesor ARM cocok untuk aplikasi berdaya rendah.
Hal ini membuat prosesor ARM mendominasi pasar mobile electronic dan embedded systemdimana membutuhkan daya dan harga yang rendah. ARM sering kita temui di hampir semua perangkat mobile seperti mobile phone, smart phone, personal digital assistant (PDA) dan perangkat digital lain seperti tablet PC, Raspberry Pi, kamera digital ,dan lain sebagainya. ARM merupakan kepanjangan dari Advance RISC Machine atau jaman dulu lebih populer dengan nama Acorn RISC Machine yang terkenal sebagai PC pada era 70-80 an. ARM menggunakan arsitektur RISC yang memungkinkan pemakaian sedikit instruksi dan pengeksekusian 1 siklus clock untuk 1 instruksi.
Arsitektur CISC dan RISC
Ditinjau dari jenis set instruksinya, ada dua jenis arsitektur komputer, yaitu:
CISC adalah singkatan dari Complex Intruction Set Computer dimana prosesor tersebut memiliki set instruksi yang kompleks dan lengkap. CISC sendiri adalah salah satu bentuk arsitektur yang menjalani beberapa instruksi dengan tingkat yang rendah. Misalnya intruksi tingakat rendah tersebut adalah operasi aritmatika, penyimpanan – pengambilan dari memori. Tujuan utama dari arsitektur CISC adalah melaksanakan suatu perintah cukup dengan beberapa baris bahasa mesin sedikit mungkin. Hal ini bisa tercapai dengan cara membuat perangkat keras prosesor mampu memahami dan menjalankan beberapa rangkaian operasi. Sebuah prosesor CISC sudah dilengkapi dengan sebuah instruksi khusus, yang di beri nama MULT. Saat dijalankan, instruksi akan membaca dua nilai dan menyimpannya ke 2 register yag berbeda, melakukan perkalian operan di unit eksekusi dan kemudian mengambalikan lagi hasilnya ke register yang benar. Jadi instruksi-nya cukup satu saja. Contoh prosesor CISC adalah : System/360, VAX, PDP-11, varian Motorola 68000 , dan CPU AMD dan Intel x86.
MULT dalam hal ini lebih dikenal sebagai complex instruction atau instruksi yang kompleks. Bekerja secara langsung melalui memori komputer dan tidak memerlukan instruksi lain seperti fungsi baca maupun menyimpan. Satu kelebihan dari sistem ini adalah kompailer hanya menerjemahkan instruksi-instruksi bahasa tingkat-tinggi ke dalam sebuah bahasa mesin. Karena panjang kode instruksi relatif pendek, hanya sedikit saja dari RAM yang digunakan untuk menyimpan instruksi-instruksi tersebut.
Ciri-ciri CISC :
• Jumlah instruksi banyak.
• Banyak terdapat perintah bahasa mesin.
• Instruksi lebih kompleks.
RISC adalah singkatan dari Reduced Instruction Set Computer berarti kumpulan Instruksi yang disederhanakan, merupakan sebuah arsitektur komputer atau arsitektur komputasi modern dengan instruksi – instruksi dan jenis eksekusi yang paling sederhana. Perbedaan yang signifikan dari RISC ini adalah tidak ditemui instruksi assembly atau yang dikenal dengan bahasa mesin sedangkan itu banyak sekali di jumpai di CISC.
Arsitektur ini digunakan pada komputer dengan kinerja tinggi, seperti komputer vektor. Selain digunakan dalam komputer vektor, desain ini juga di implementasikan pada prosesor komputer lain, seperti pada beberapa mikroprosesor Intel 960, Itanium (IA64) dari Intel Corporation, Alpha AXP dari DEC, R4x00 dari MIPS Corporation, PowerPC dan Arsitektur POWER dari International Business Machine. Selain itu, RISC juga umum dipakai pada Advanced RISC Machine (ARM) dan StrongARM (termasuk di antaranya adalah Intel XScale), SPARC dan UltraSPARC dari Sun Microsystems, serta PA-RISC dari Hewlett-Packard. Selain RISC, desain Central Processing Unit yang lain adalah CISC (Complex Instruction Set Computing), yang jika diterjemahkan ke dalam Bahasa Indonesia berarti Komputasi Kumpulan Instruksi yang kompleks atau rumit.Cara sederhana untuk melihat kelebihan dan kelemahan dari arsitektur RISC adalah dengan langsung membandingkannya dengan arsitektur pendahulunya yaitu CISC.
Ciri-ciri RISC :
• Instruksi berukuran tunggal Ukuran yang umum adalah 4 byte.
• Jumlah mode pengalamatan data yang sedikit, biasanya kurang dari lima buah .
• Tidak terdapat pengalamatan tak langsung.
• Tidak terdapat operasi yang menggabungkan operasi load/store dengan operasi aritmatika (misalnya, penambahan dari memori, penambahan ke memori).
• Menekankan pada perangkat lunak, dengan sedikit transistor.
• Instruksi sederhana bahkan single- Load / Store atau memory ke memory bekerja terpisah.
• Ukuran kode besar dan kecapatan lebih tinggi.
• Transistor didalamnya lebih untuk meregister memori.
• Lebih menekankan pada perangkat keras, sesuai dengan takdirnya untuk pragramer.
• Memiliki instruksi komplek. Load / Store atau Memori ke Memori bekerjasama.
• Memiliki ukuran kode yang kecil dan kecepatan yang rendah.
• Transistor di dalamnya digunakan untuk menyimpan instruksi – instruksi bersifat komplek.
Konsep Dasar Raspberry Pi
Raspberry Pi adalah sebuah SBC (Single Board Computer) yang bisa digunakan sebagaimana komputer (PC). Sebuah komputer single board (SBC) adalah lengkap komputer dibangun di atas satu papan sirkuit, dengan mikroprosesor, memori, input / output (I / O) dan fitur lainnya yang diperlukan dari komputer fungsional. Komputer single board dibuat sebagai demonstrasi atau pengembangan sistem, untuk sistem pendidikan, atau untuk digunakan sebagai pengendali komputer tertanam . Banyak jenis komputer rumah atau komputer portabel yang terintegrasi semua fungsi mereka ke sebuah papan sirkuit tunggal dicetak.
Raspberry Pi dikembangkan di United Kingdom oleh Raspberry Pi Foundation yang awalnya ditujukan untuk pembelajaran komputer dan programming bagi anak-anak di sekolah. Alat yang berukuran sebesar kartu kredit ini memiliki desain berdasarkan Broadcom BCM 2835 SOC (System on Chip). System on Chip merupakan sirkuit yang telah terintegrasi dengan seluruh komponen komputer atau sistem elektronik lainnya ke dalam satu chip.
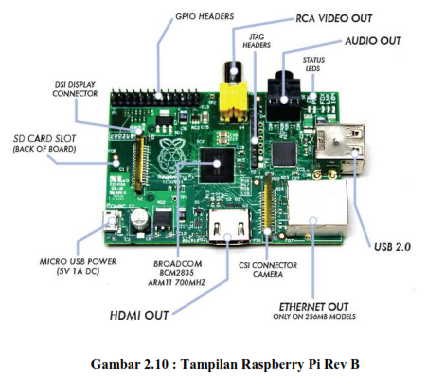
Keterangan :
Raspberry Pi memiliki sistem Broadcom BCM2835 chip (SoC), yang mencakup ARM1176JZF-S 700 MHz processor (firmware termasuk sejumlah mode "Turbo" sehingga pengguna dapat mencoba overclocking, hingga 1 GHz, tanpa mempengaruhi garansi), VideoCore IV GPU, dan awalnya dibuat dengan 256 megabyte RAM, kemudian upgrade ke 512MB.Termasuk built-in hard disk atau solid-state drive, akan tetapi menggunakan SD Card untuk booting dan penyimpanan jangka panjang.
Raspberry Pi adalah platform yang sangat fleksibel, ada banyak hal yang bisa dilakukan dengan Raspberry Pi. Beberapa hal tersebut antara lain :
Pin GPIO Raspberry Pi
Pada raspberry pi terdapat pin GPIO (General Purpose Input Output) merupakan sederet pin yang terdiri dari 26 pin dengan berbagai fungsi diantaranya:
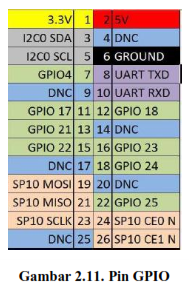
Keterangan :
• Digital to analogue converter
• Analogue to digital converter
• Oscillators
• utput expander
• input expander
Dengan batas arus maximum < 100 mA di pin 5V dan batas arus maximum < 50 mA di pin 3,3V, pada setiap pin digital baik input/output memiliki logika high 3,3V dan logika low 0V.Apabila tegangan > 3,3V pada setiap pin mana pun maka dapat mengakibatkan kerusakan.
Sistem operasi Raspberry Pi
Konsep Dasar Elektronika
Hampir setiap tempat kita dapat menjumpai piranti yang di dalamnya terdapat peralatan elektronika, mulai dari PDA, computer, robot, televisi, radio, hingga mesin pembuat kopi. Yang menarik adalah piranti – piranti yang memiliki fungsi dan kompleksitas yang beragam tersebut, sebenarnya dibangun oleh suatu komponen – komponen dasar (devices) yang serupa. Dalam piranti televisi dan mesin pembuat kopi hanya dibutuhkan beberapa puluh komponen elektrik, namun piranti seperti PDA, computer dan robot membutuhkan berjuta – juta komponen elektrik.
Untuk memahami bagai mana sebuah piranti dibangun atas komponen – komponen elektrik, berikut ini adalah komponen elektrik dan berserta penjelasannya.
Tahanan atau dikenal juga tahanan listrik, resistor atau dengan istilah lain yakni werstan. Besarnya nilai tahanan dinyatakan dalam Ohm. Tahanan memiliki kegunaan sebagai berikut :
adapun mengenai macam-macam tahanan adalah sebagai berikut :
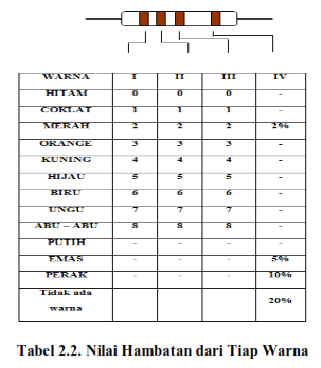
dioda adalah komponen semi konduktor yang mengalirkan arus satu arah saja. Dioda dibuat dari germanium atau silicon yang lebih dikenal dengan dioda junction. Struktur dari diode ini, sesuai dengan namanya, adalah sambungan antara semikonduktor tipe P dan semikonduktor tipe N. semi konduktor tipe P berperan sebagai anoda dan semikonduktor tipe N berperan sebagai katoda. Dengan struktur seperti ini arus hanya dapat mengalir dari sisi P ke sisi N.
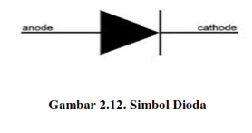
Berikut ini adalah macam - macam dioda :
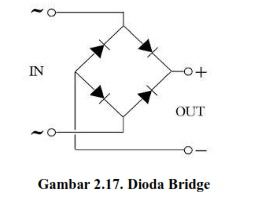
Dioda bridge atau yang dikenal dengan dioda silicon yang dirangkaikan menjadi suatu bridge dan dikemas menjadi satu kesatuan komponen. Dioda bridge digunakan sebagia penyearah pada power suplly. jembatan dioda adalah gabungan empat atau lebih dioda yang membentuk sebuah jembatan konfigurasi yang menyediakan polaritas output dan polaritas input ketika digunakan dalam aplikasi yang paling umum konversi dari arus bolak balik. Fungsi atau bagian utama dari jembatan dioda adalah bahwa polaritas outputnya berbeda dengan polaritas input. Sebutan lain dari rangkaian jembatan dioda banyak disebut juga sebagai sircuit Gratez yang diambil dari nama leo graetz seorang ilmuwan fisika.
Transistor bipolar biasanya digunakan sebagai saklar dan penguat pada rangkaian elekronika digital. Transistor memiliki 3 terminal semi konduktor pada satu terminal adalah berfungsi sebagai pembuka (open) atau rangkaian. Transistor biasanya lebih banyak dibuat dari bahan silicon ini dapat mengubah jenis N dan P. Tiga kaki yang berlainan membentuk transistor bipolar adalah emitor, basis, dan kolektor. Dapat dikombinasikan menjadi jenis N-P-N atau P-N-P yang menjadi satu bagian tiga kaki transistor .
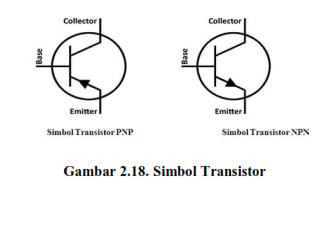
Pada rangkaian elektronik, sinyal input adalah 1 dan 0. Sinyal ini selalu dipakai pada basis transistor, yang mana elector dan emitor sebagai penghubung untuk pemutus (short) atau sebagai pembuka rangkaian. Rangkain transistor sebagai berikut :
•Pada transistor NPN, memberikan tegangan positif dari basis ke emitor, menyebabkan hubungan kolektor ke emitor terhubung singkat, yang menyebabkan transistor aktif (on). Memberikan tegangan negatif atau 0 volt dari basis ke emitor menyebabkan hubungan kolektor dan emitor terbuka, yang disebut transistor (off).
•Pada transistor PNP, memberikan tegangan negatif dari basis ke emitor ini akan menyalakan transistor (on). Dan memberikan tegangan positif dari basis ke emitor ini akan membuat transistor mati (off).
Kapasistor adalah komponen elektrik yang berfungsi menyimpan muatan listrik. Kapasitor berbeda dengan akumulator dalam menyimpan muatan listrik terutama tidak terjadi perubahan kimia pada bahan kapasitor, besarnya kapasitansi dari sebuah kapasitor dinyatakan dalam farad.
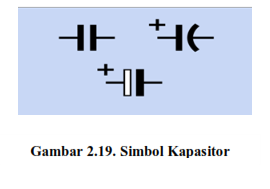
• Kapasitor Polar
Kelompok kapasitor electrolytic terdiri dari kapasitor-kapasitor yang bahan dielektriknya adalah lapisan metal-oksida. Umumnya kapasitor yang termasuk kelompok ini adalah kapasitor polar dengan tanda (+) dan (–) di badannya. Mengapa kapasitor ini dapat memiliki polaritas, adalah karena proses pembuatannya menggunakan elektrolisa sehingga terbentuk kutup positif anoda dan kutup negatif katoda.

• Kapasitor Nonpolar
Kapasitor non polar adalah kelompok kapasitor yang dibuat dengan bahan dielektrik dari keramik, film dan mika. Keramik dan mika adalah bahan yang popular serta murah untuk membuat kapasitor yang kapasitansinya kecil. Tersedia dari besaran pF sampai beberapa uF, yang biasanya untuk aplikasi rangkaian yang berkenaan dengan frekuensi tinggi. Termasuk kelompok bahan dielektrik film adalah bahan-bahan material seperti polyester (polyethylene terephthalate atau dikenal dengan sebutan mylar), polystyrene, polyprophylene, polycarbonate, metalized paper dan lainnya.
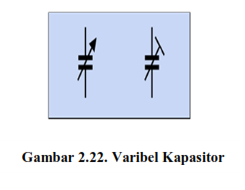
Konsep Dasar Motor DC
Motor DC merupakan jenis Motor yang sering digunakan dalam dunia Robotika. Salah satu alasannya adalah arah putaran Motor DC baik searah jarum jam maupun berlawanan arah jarum jam, dapat dengan mudah dikendalikan. Pada Robot ini digerakkan oleh dua buah Motor dan satu buah motor micro pump dengan tipe Motor DC. Motor DC yang dipakai bertipe Motor DC Brushed yang sudah banyak digunakan pada mainan Tamiya.
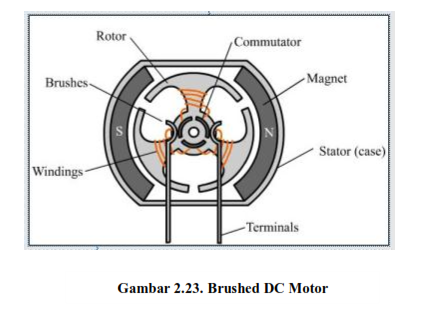
Motor DC memerlukan supply tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Bagian utama motor DC adalah statos dan rotor dimana kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan DC dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan.
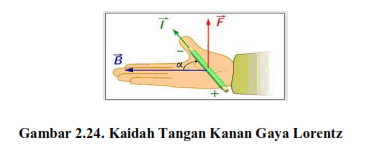
Beda potensial (tegangan) antara dua terminal akan mengalirkan arus listrik dari positif (+) ke negatif (-) melalui terminal – sikat (brush) – lilitan (windings) tembaga seperti terlihat pada Gambar 3, arus listrik diilustrasikan oleh arah panah merah (I). Kemudian mengikuti kaidah tangan kanan, karena ada arus listrik yang mengalir pada lilitan dalam medan-magnet-tetap, maka akan dihasilkan gaya Lorentz seperti pada Gambar 3 yang d. Proses inilah yang secara terus menerus berlangsung pada motor dc yang menyebabkannya berputar selama ada beda potensial pada terminal-nya. Semakin besar beda potensial pada kedua terminal-nya, maka akan semakin besar arus listrik yang mengalir pada lilitan, dengan demikian semakin besar pula gaya Lorentz yang dihasilkan dan motor pun akan berputar semakin cepat, sesuai dengan persamaannya : F = B x IL
Motor DC dengan sikat karbon (Brushed DC Motor) merupakan rancangan awal sebuah motor listrik. Hingga saat ini Brushed DC Motor adalah pilihan paling utama untuk motor yang memiliki torsi dan kecepatan yang mudah di kendalikan. Keuntungan menggunakan Brushed DC Motor adalah :
Konsep Dasar Motor DC Driver
Budiharto (2010:305)[1], “Motor Drive berfungsi mengendalikan dan mengatur kecepatan putaran motor DC atau pun motor stepper karna membutuhkan arus yang cukup besar".
Pada IC L298N, terdapat output 4 jalur yang dapat mengendalikan 1 atau 2 buah motor DC atau motor Stepper. Untuk motor DC cukup berikan logika high atau low disalah satu pin dari 2 pin yang digunakan oleh tiap motor, dimana logika high atau low menentukan arah putaran motor DC.
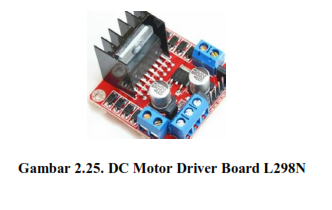
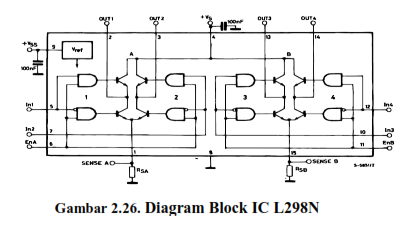
Spesifikasi Motor Driver Board L298N :
Konsep Dasar Sensor Kedekatan
Frank D.Petruzella dalam Drs. Sumanto.MA, (2001:158)[13], “Sensor kedekatan adalah pilot yang mendeteksi adanya objek (biasanya disebut target) tanpa kontak fisik. Sensor tersebut adalah alat elektronis solid-state yang terbungkus rapat untuk melindungi terhadap pengaruh getaran, cairan, kimiawi, dan korosif yang berlebihan”.
Sensor infrared untuk dapat mendeteksi sebuah objek dan mendapatkan gambaran serta jaraknya adalah dengan menggunakan panas tertentu dari sebuah benda atau objek. Setiap suhu panas dari suatu objek akan tertangkap oleh sensor infrared karena infrared menggunakan sumber utamanya yaitu radiasi panas atau juga radiasi termal. Sensor ini biasanya digunakan sebagai indra penglihatan dari robot seperti layaknya sebuah mata pada manusia.

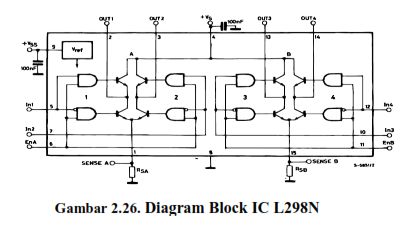
Spesifikasi Sensor Infrared :
Pin Out:
Prinsip Kerja Relay
Menurut Frank D.Petruzella dalam Drs. Sumanto.MA.(2c001:372)[13],Relay pengendali elektromekanis (an electromechanical relay = EMR) adalah saklar magnetis. Relay ini menghubungkan rangkaian ON dan OFF dengan pemberian energi elektromagnetis,yang membuka atau menutup kontak pada rangkaian. EMR mempunyai variasi aplikas yang luas baik pada rangkain listrik maupun elektronis.
Menurut Budiharto (2010:47)[1], Transistor tidak dapat berfungsi sebagai switch (saklar) tegangan AC atau tegangan tinggi. Selain itu, umumnya tidak digunakan sebagai switching untuk arus besar (>5A). dalam hal ini, penggunaan relay sangatlah tepat. Relay berfungsi sebagai saklar yang bekerja berdasarkan input yang dimilikinya..
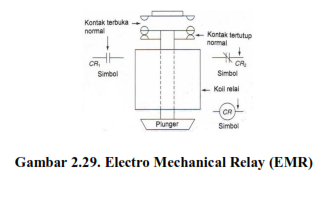
Relay biasanya mempunyai satu kumparan, tetapi relay dapat mempunyai beberapa kontak point. Relay elektromagnetis berisi kontak diam dan kontak bergerak. Kontak bergerak dipasangkan pada plunger. Kontak ditunjuk sebagai normally open (NO) dan normally close (NC). Apabila kumparan diberi tegangan, terjadi medan magnetis.
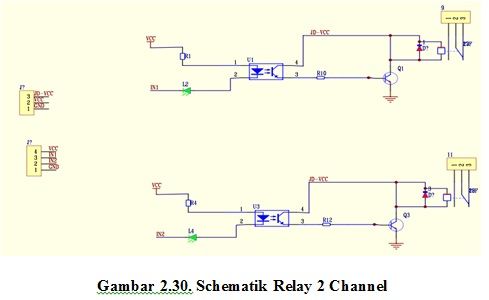
Spesifikasi Relay 2 channel :
Keuntungan relay :
Kekurangan Relay :
Konsep Dasar Adaptor
Menurut Budiharto (2010:1)[1], “Adaptor adalah sebuah piranti yang dapat mengubah tegangan listrik sumber menjadi tegangan listrik yang dibutuhkan oleh suatu piranti. ”.
Adaptor bermanfaat untuk mengubah arus listrik AC tegangan tinggi (220V) menjadi arus listri DC tegangan rendah ( biasanya kurang dari atau sama dengan 24 volt). Skema block sistem adaptor digambarkan sebagai berikut :
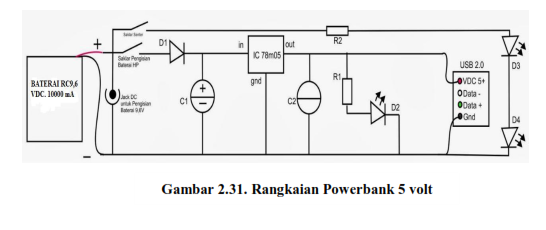
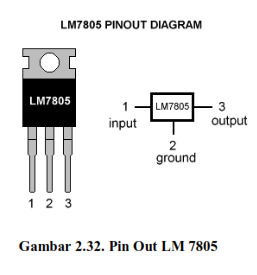
Power bank merupakan seperangkat sumber daya yang berisi baterai dengan daya yang besar dengan kapasitas bervariasi 2000mA – 10000mA, tidak menutup kemungkinan diatas 10000mA. Baterai memiliki 9,6 volt DC, yang diturunkan dengan regulator LM7805.
Berikut ini keteranga IC Regulator :
Regulator Step - Down
Module Step – Down Voltage Regulator berfungsi untuk menurunkan tangan catu daya sumber menjadi tengangan output rendah dari tegangan input. Modul regulator Step – Down ini menggunakan IC LM 2596, 3A . Pada chip LM2596 bekerja pada frekuensi switching 150 kHz, memungkinkan komponen penyaring berukuran berukuran lebih kecil dibanding komponen penyaring yang biasa dibutuhkan oleh switching regulator berfrekuensi rendah. IC ini menjamin toleransi perbedaan tegangan keluaran hanya ±4% pada tegangan masukan dan kondisi beban keluaran sesuai spesifikasi, dan ±15% toleransi pada frekuensi osilator. Fitur proteksi termasuk pembatas arus pengurang frekuensi dua tahap (two stage frequency reducing current limit) untuk output switch dan fitur mematikan chip secara otomatis pada kondisi kelebihan panas (over termperature).
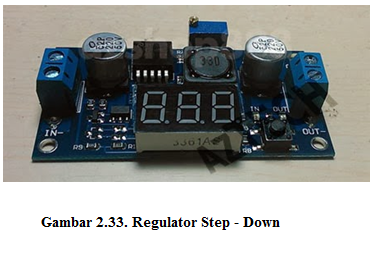
Pada Modul Regulator Switch Step Down dilengkapi dengan voltmeter (pengukur tegangan) pada pin keluaran, sehingga penyetelan tegangan keluaran yang diinginkan menjadi mudah dan akurat tanpa perlu diukur oleh voltmeter eksternal. Nilai tegangan keluaran ditampilkan pada LED numeric. Besar tegangan yang diinginkan dapat disetel dengan memutar mutli-turn potentiometer.
Webcam
Webcam atau kamera web adalah sebuah kamera video digital kecil yang dihubungkan ke komputer melalui port USB ataupun port COM. Sebuah web camera yang sederhana terdiri dari sebuah lensa standar, dipasang di sebuah papan sirkuit untuk menangkap sinyal gambar, casing (cover), termasuk casing depan dan casing samping untuk menutupi lensa standar dan memiliki sebuah lubang lensa di casing depan yang berguna untuk memasukkan gambar; kabel support, yang dibuat dari bahan yang fleksibel, salah satu ujungnya dihubungkan dengan papan sirkuit dan ujung satu lagi memiliki connector, kabel ini dikontrol untuk menyesuaikan ketinggian, arah dan sudut pandang web camera.

Technical Specifications :
Bahasa Pemograman Phyton
Menurut Raharjo(2004:44)[9], “program adalah urut – urutan intruksi untuk menjalankan suatu komputasi.”.
Python memiliki kelebihan tersendiri dibandingkan dengan bahasa lain terutama dalam hal penanganan modul, selain itu python merupakan salah satu produk yang opensource, free, dan multiplatform.
Beberapa fitur yang dimiliki phyton :
Sistem Operasi Android
Menurut Wahadyo(2013:2)[14], “Android adalah sistem operasi disematkan pada gadget, baik itu hand phone, tablet, juga sekarang sudah merambah ke kamera digital dan jam tangan”.
Menurut Jubilee (2010:2)[15], “Android merupakan sistem operasi mobile berbasis karnel linux yang dikembangkan oleh Android Inc dan kemudian diakusisi oleh Google ”.
Berdasarkan beberapa definisi tersebut dapat disimpulkan bahwa sistem operasi android adalah sistem operasi yang diperuntukan dalam kemudahan pengoperasiannya, untuk itu sistem operasi ini sangat cocok untuk perangkat gadget seperti smart phone. Sistem operasi android bersifat open source sehingga para programmer dapat membuat aplikasi secara mudah. Di dunia ini terdapat dua jenis distributor sistem operasi Android. Pertama yang mendapat dukungan penuh dari Google atau Google Mail Services (GMS) dan kedua adalah yang benar–benar bebas distribusinya tanpa dukungan langsung Google atau dikenal sebagai Open Handset Distribution (OHD).
• Kerangka aplikasi: itu memungkinkan penggunaan dan penghapusan komponen yang tersedia.
• Dalvik mesin virtual: mesin virtual dioptimalkan untuk perangkat telepon seluler.
• Grafik: grafik di 2D dan grafis 3D berdasarkan pustaka OpenGL.
• SQLite: untuk penyimpanan data.
• Mendukung media: audio, video, dan berbagai format gambar (MPEG4, H.264, MP3, AAC, AMR, JPG, PNG, GIF)
• GSM, Bluetooth, EDGE, 3G, 4G dan WiFi.
• Kamera, Global Positioning System (GPS), kompas, NFC dan accelerometer.
Basic4android
Basic4android adalah bahasa pemograman yang sederhana, tapi juga sangat power full dipergunakan pada perangkat android, seperti smart phone. Basic4android seperti bahasa pemograman visual basic yang berorientasi pada object, pemograman basic4android tidak perlu compile maupun tambahan run time, tidak seperti Integrated Development Environment (IDE) pada biasanya. Basic4android sepenuhnya berfokus pada pengembangan android.
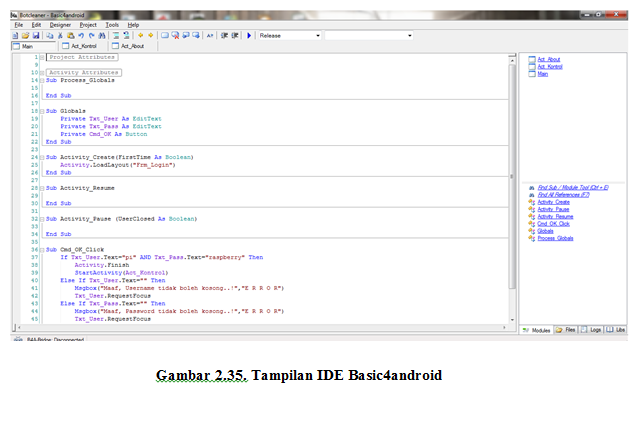
Basic4android menyediakan Garphical user interface yang power full dengan dukungan multi layar. Basic4android dapat di debug menggunakan emulator atau langsung pada perangkat android, dengan menggunakan koneksi USB maupun local area network. Basic4android kaya akan libraries, memudahkan untuk membuat suatu aplikasi, didalamya sudah tersedia : SQL database, GPS, Serial ports (Bluetooth), Camera, XML parsing, Web service (HTTP), Service (background tasks), JSON, Animations, Network (TCP dan UDP), Text to speech (TTS), Voice recognition, webView, AdMob (ads), Chart, OpenGL, Graphics. Ada dua aplikasi pendukung sebelum menginstall basic4android yaitu Java JDK dan Android SDK . Pengembangan aplikasi android akan menghasilkan file paket aplikasi dengan format file APK. Ketika pembuatan program pada IDE Basic4android selesai out put dari run program menghasilkan file dengan format APK seperti pada gambar 2.35, sebagai berikut.
Literature Review
Menurut Guritno(2011:86)[16], “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama”.
Beberapa literature review tersebut adalah sebagai berikut :
Dari beberapa sumber literature review diatas, dapat diketahui bahwa penelitian tentang sistem kendali otomatis sudah banyak dibahas baik menggunakan mikrokontrolor maupun menggunakan embedded sistem linux yaitu raspberry pi, saat ini sudah banyak yang memulai mengembangkan raspberry pi sebagai sistem kendali otomatis, untuk itu penulis ingin ikut andil dalam pengembangan raspberry pi, berdasarkan hal tersebut dibuatkanlah penelitian yang berjudul : Pemanfaatan Raspberry Pi Sebagai Robot Pembersih Panel Solar Cell Menggunakan Media Wifi Pada PT langgeng Baja Pratama.
BAB III
Gambaran Umum Perusahaan
Sejarah Singkat Perusahaan
PT. Langgeng Baja Pratama berdiri pada Januari 1991 dan mulai produksi secara komersial pada tahun 1997. Berlokasi di MM2100 Kawasan Industri Cibitung - Bekasi Indonesia, dengan lahan seluas 9 hektar. PT. Langgeng Baja memproduksi kawat baja dan tali kawat baja dari semua jenis dari disain dasar hingga desain yang rumit, dari ukuran yang kecil berdiameter 3 mm sampai ukuran yang besar berdiameter 44 mm.

PT. Langgeng Baja Pratama adalah salah satu perusahaan kawat baja dan juga produsen tali kawat terbesar di Indonesia. Mesin produksi berasal dari beberapa perusahaan terkenal di eropa seperti Redaelli Tecna Meccanica (RTM), Le Four of Industrial Beige (FIB), Office Technique des Trefiles (OTT), Mecchanical Engineering (ME), Compac, dan Lamnea Bruk. Semua hasil proses produk dan produksi diperiksa oleh inspektur yang berkualitas dan berpengalaman menggunakan peralatan pengujian modern. Perusahaan menjamin bahwa semua produk dan proses memenuhi semua standar dan spesifikasi yang dibutuhkan.
Visi dan Misi Perusahaan
Wewenang dan Tanggung Jawab
• Menjalankan dan mengelolah perusahaan sesuai dengan visi dan misi perusahaan.
• Mengendalikan operasi perusahaan sehari – hari dalam batas – batas yang ditetapkan.
• Memilih, menetapkan, dan mengawasi kinerja dari karyawan.
• Bertanggung jawab penuh dalam anggaran tahunan perusahaan.
• Menjalankan dan mengelolah perusahaan sesuai dengan kebijakan perusahaan.
• Memimpin dan mengendalikan segala aktifitas yang terjadi di perusahaan.
• Melakukan pengawasan terhadap seluruh kegiatan perusahaan.
• Bertanggung jawab internal dan external perusahaan dalam semua aspek yang mempengaruhi kegiatan perusahaan.
• Bertanggung jawab pada pengadaan dana untuk kelancaran operational perusahaan.
• Bertanggung jawab pada general manager mengenai kelancaran seluruh aktivitas yang berlangsung di pabrik
• Bertanggung jawab atas seluruh gegiatan dalam perusahaan.
• Membantu tugas dari plant manager.
• Mengawasi kegiatan yang ada dalam lingkungan perusahaan.
• Memberikan pengarahan kepada setiap team leader mengenai aktivitas di lingkungan kerja.
• Dapat menentukan sumber penerimaan bahan baku untuk proses produksi.
• Dapat menolak bahan baku yang tidak sesuai dengan katagori yang ada.
• Bertanggung jawab pada general manager tersedianya bahan baku.
• Memimpin dan mengendalikan kegiatan dalam bidang pembukuan dan keuangan.
• Memberikan prioritas kebijakan menyangkut keuangan.
• Melakukan pengawasan dan pengendalian atas seluruh kinerja manajemen pemasaran, penjualan dan promosi bagi kepentingan perusahaan.
• Bertanggung jawab atas pengembangan sistem dan mekanisme manajemen pemasaran penjualan dan promosi secara umum.
• Mempromosikan dan memberhentikan karyawan.
• Membuka lowongan kerja dan menetapkan syarat – syarat bagi karyawan baru.
• Bertanggung jawab atas adminitrasi kepegawaian.
• Melakukan pengawasan terhadap penelitian – penelitian yang dilakukan pada laboratorium.
• Memberikan pengarahan kepada team leader untuk setiap kegiatan pengendalian dan pemeriksaaan mutu produk hasil hasi produksi.
• Bertanggung jawab atas kwalitas dan kontinyuitas hasi produksi.
• Mengendalikan mutu produk.
• Memberikan saran pada general manager apabila diperlukan mengenai rencana produksi perusahaan, serta hasil evaluasi terhadap hasil produksi.
• Bertanggung jawab pada production manager mengenai pembuatan perencanaan jadwal produksi.
•Melakukan perencanaan proses hasil produksi.
• Mengkoordinir kegiatan produksi sesuai dengan schedule hasil produksi
• Memberi pengarahan kepada team leader.
• Memberi penilaian dan penghargaan terhadap karyawan yang berprestasi.
• Mengatasi dan meminilimasikan setiap kegagalan hasil produksi.
• Menjalankan proses produksi yang lebih efektif dan efisien.
• Melakukan pengawasan dan perawatan terhadap mesin produksi maupun alat – alat pendukung lainnya.
• Menjaga ketersediaan spare part mesin produksi.
• Bertanggung jawab atas kelancaran prosses produksi dalam support maintenance.
• Melakukan koordinasi, pengarahan, dan melaksanakan proses hasil produksi dengan tujuan maksimal, diukur dalam waktu, biaya dan mutu.
• Mengatasi masalah yang timbul dari consumen untuk dapat menyusun pemecahan masalah.
• menganalisa masalah yang timbul dari sales untuk dapat menyusun pemecahan masalahnya.
Struktur Organisasi Perusahaan
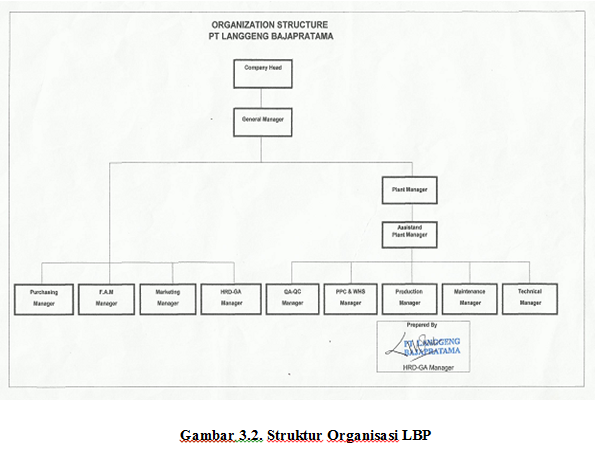
Analisa Kebutuhan Sistem
Dalam perancangan sistem aplikasi yang sangat diperlukan adalah seberapa jauh pihak user menginginkan output yang dihasilkan dari aplikasi tersebut. Dalam hal ini output yang diperlukan oleh user adalah membuat perkerjaan membersihkan panel solar cell yang sebelumnya dilakukan secara manual menjadi otomatis.
Sistem yang Berjalan
Permasalahan yang sering terjadi terhadap solar cell adalah debu yang menghalangi cahaya yang masuk ke panel surya. Untuk membersihkan panel surya selama ini dengan cara convensional, yaitu membersihkannya dengan kain atau spone, yang sudah dibasahi dengan air sebelumnya, lalu dibersihkan dengan mengusapkannya ke permukaan panel surya satu demi satu perbagian panel surya, tentunya akan memakan waktu lebih lama, dan menguras tenaga yang cukup besar. Untuk lebih jelas dapat dilihat flowchart sistem pada gambar 3.3.
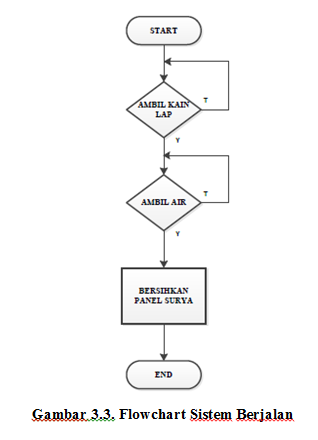
Algoritma Sistem :
Sistem yang Diusulkan
Pada sistem yang diusulkan proses membersihkan panel tata surya sudah bekerja secara otomatis, robot ini dapat membantu meringankan pekerjaan manusia dalam hal membersihkan panel surya, robot ini dapat bekerja secara cepat dan dapat mengalirkan air sehingga dalam proses membersihkan panel surya lebih maksimal. Untuk lebih jelas dapat dilihat flowchart sistem pada gambar 3.4.
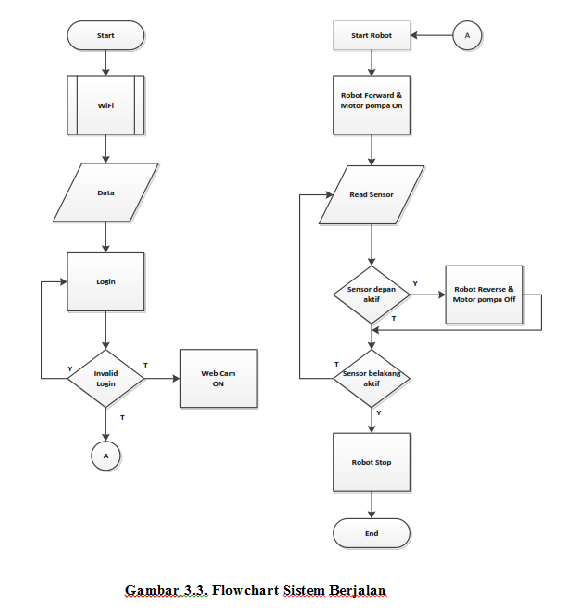
Algoritma Sistem :
Alur Sistem Perangkat Lunak
DFD Level Nol
Untuk menggambarkan analisis perangkat lunak, penulis menggunakan diagram DFD. Berikut ini adalah sistem control yang dibangun menggunakan diagram DFD Level Nol.
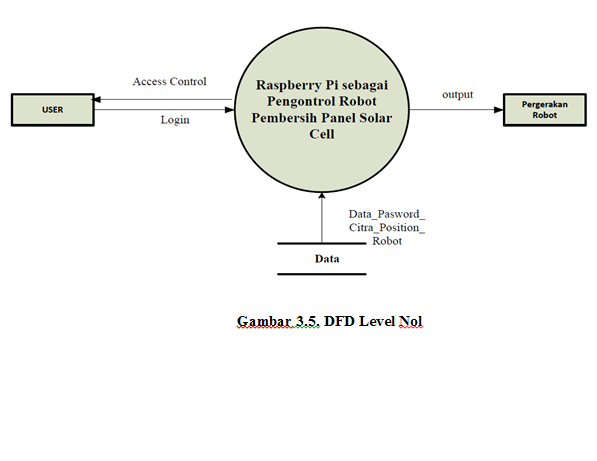
DFD Level 1
Pada Data Flow Diagram (DFD) akan dibagi menjadi empat garis besar proses utama, yaitu WiFi Adapter, Raspberry Pi, Motor Driver, dan Relay Driver.
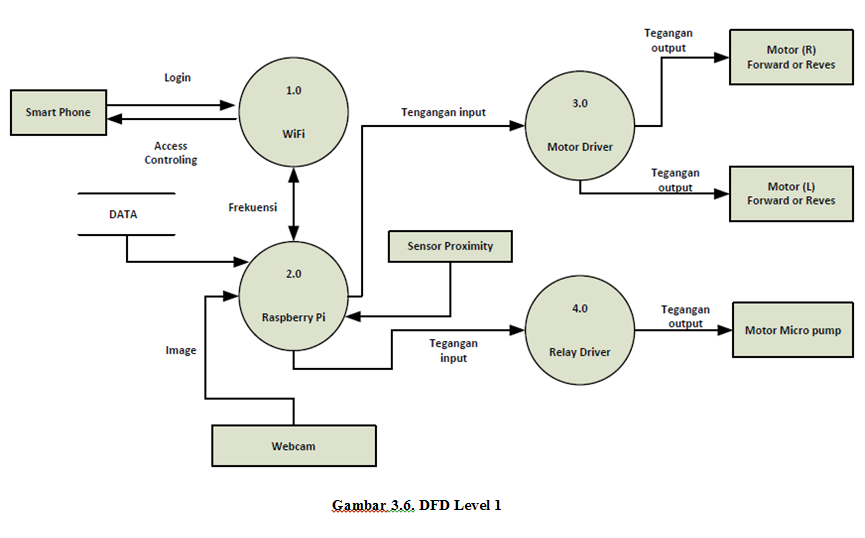
Untuk lebih jelasnya dapat dilihat pada tabel 3.1.
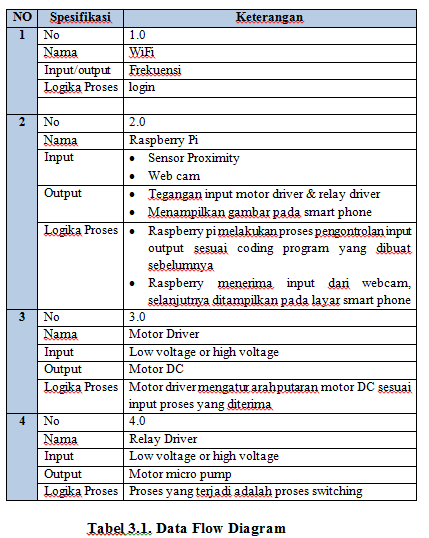
Desain dan Rangkaian Kendali Robot
Desain Prototipe Robot
Pada awal perancangan robot pembersih panel solar cell ini penulis terlebih dahulu mendisain tata letak komponen, bertujuan agar ketika robot bekerja atau beroperasi tidak terganggu dengan komponen yang dipasang dan komponen pendukung tidak mudah lepas. Untuk lebih jelasnya dapat dilihat pada gambar. 3.7.
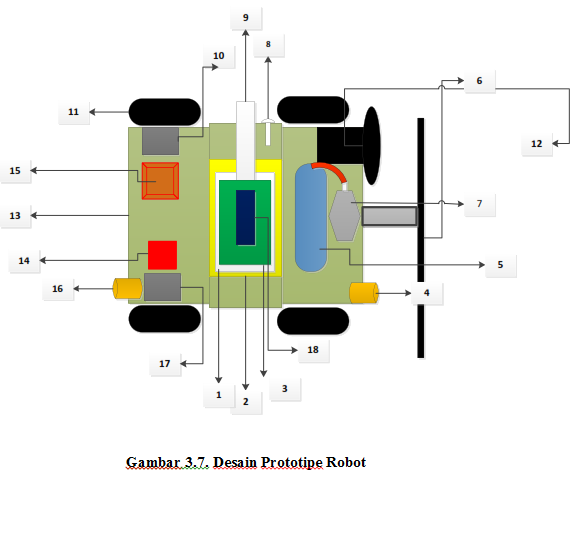
Keterangan Gambar :
Rangkaian Keseluruhan Kendali Robot
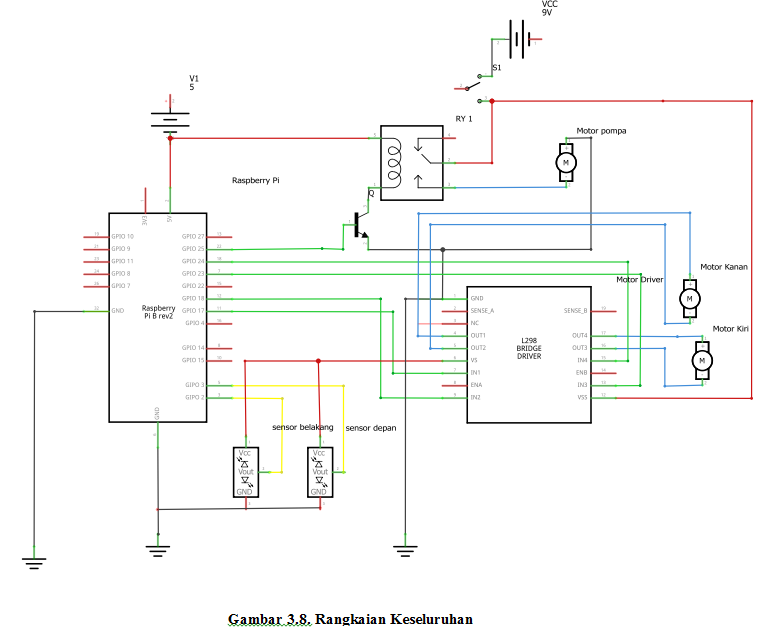
Diagram Block Sistem
Pada perancangan sistem robot pembersih panel solar cell ini yaitu dengan menggunakan board raspberry pi tipe B sebagai pemroses data dan gambar secara kontinyu, serta menggunakan kamera standar yang digunakan pada raspberry pi sebagai pengkondisi sinyal yang bekerja untuk menangkap gambar yang selanjutnya ditampilkan ke halaman Web. Pada Robot juga terdapat input dari sensor proximity yang diproses menjadi nilai yang akan di proses pada raspberry pi. Untuk lebih jelasnya dapat dilihat pada gambar 3.8,yang merupakan gambaran dari blok sistem secara keseluruhan.
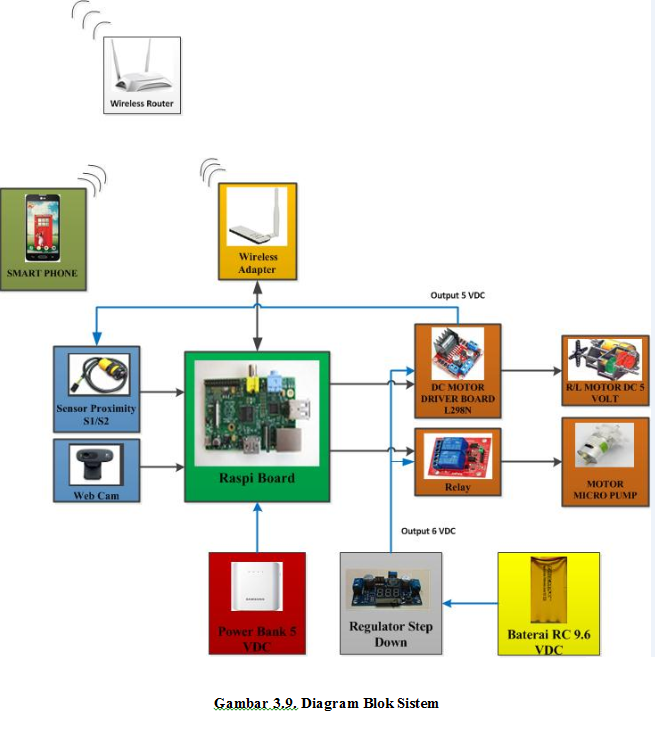
Perangcangan Perangkat Keras
Pada perancangan perangkat keras ini terdapat beberapa rangkaian yang digunakan dan disusun agar dapat berkomunikasi antara satu rangkaian dengan rangkaian yang lainnya, sehingga terjadi kekompakan dalam menjalankan proses sistem secara utuh dan menyeluruh. Untuk lebih jelas tentang masing-masing rangkaian yang digunakan pada sistem ini dapat dilihat pada masing-masing perancangan rangkaian yang mengacu pada diagram blok gambar 3.9.
Catu Daya
Power bank dan baterai ini digunakan untuk memberikan suplai tegangan kerja pada masing-masing rangkaian, sehingga dapat bekerja sesuai dengan fungsi dari masing-masing komponen. Adapun rangkaian yang membutuhkan suplai catu daya antara lain : Rangkaian Raspberry pi, sensor proximity, Rangkaian pengendali motor DC, Rangkaian pengendali motor micro pump, Serta Kamera dan WiFi adapter yang tidak secara langsung mendapatkan tegangan kerja dari catu daya, akan tetapi melalui modul Raspberry pi. Penggunaan power bank dan baterai ini sesuai dengan kebutuhan dari sistem rangkaian keseluruhan sistem yang masing-masing rangkaian berbeda nilai tegangan powernya. Untuk lebih jelas port output mana saja yang digunakan dapat dilihat pada gambar 3.10 berikut.
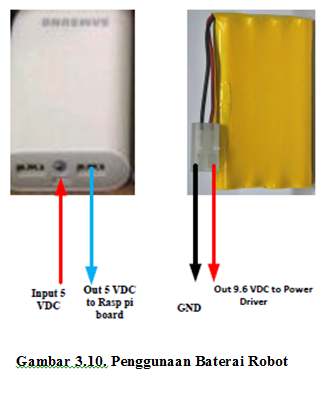
Tegangan kerja untuk rangkaian Rasberry pi board menggunakan tegangan sebesar 5 VDC dan untuk sumber tegangan sensor proximity, motor driver, relay board, motor pump dan motor dc menggunakan baterai dengan tegangan 9,6 VDC.
Rangkaian Raspberry Pi
Rangkaian Raspberry pi merupakan modul yang siap untuk digunakan hanya dengan menambahkan instalasi sistem operasi berbasis linux yang tertanam pada memori SDHC class 10 sebesar 8GB. Pada bagian perancangan perangkat keras ini akan lebih membahas antarmuka pin masukan dan keluaran yang terhubung dengan modul Raspberry pi. Masing-masing rangkaian akan lebih banyak dihubungkan pada pin GPIO (General Purpose Input Output) dan kamera serta WiFi adapter yang terhubung dengan port USB. Untuk lebih jelas masing-masing koneksi pin GPIO dapat dilihat pada gambar 3.11
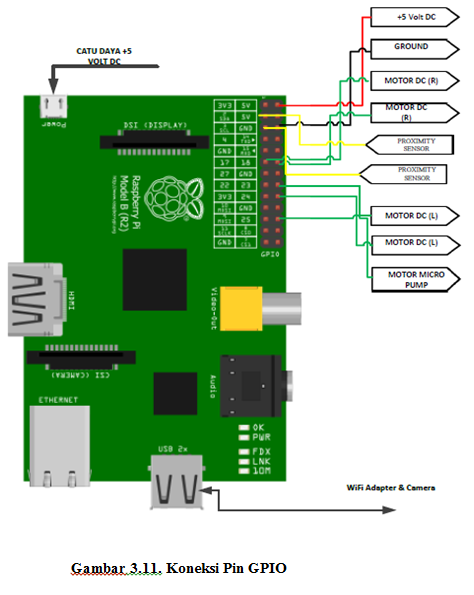
Mengacu pada gambar 3.11 berikut ini keterangan kebutuhan pin GPIO dalam bentuk table yang menjelaskan letak pin berikut fungsi pin yang menunjang sistem.
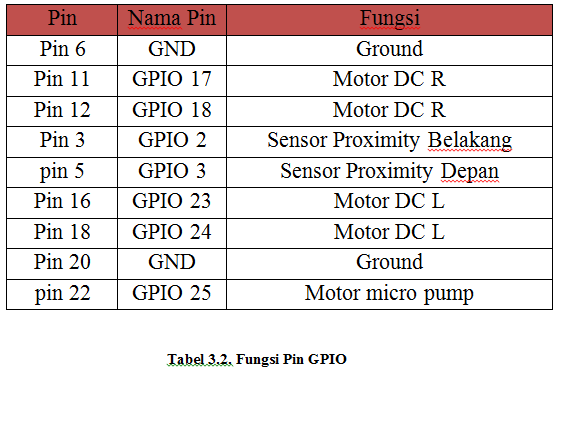
Rangkaian Sensor Proximity
Rangkaian Sensor proximity dipergunakan untuk menentukan arah putaran motor DC. Output dari Sensor proximity dihubungkan dengan pin GPIO pada Raspberry pi. Untuk lebih jelasnya dapat dilihat pada gambar 3.12.
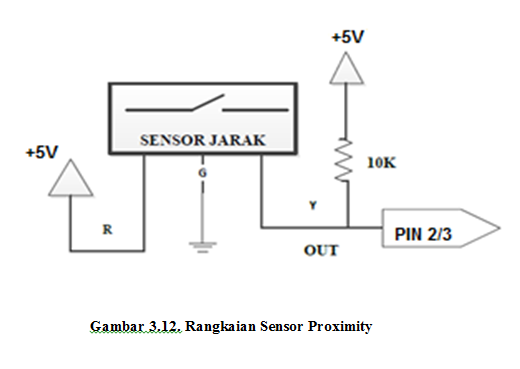
Keterangan :
• VCC, merupakan masukan untuk tegangan kerja sensor tersebut sebesar +5V.
• GND, dihubungkan dengan kutub negatif atau ground pada rangkaian.
• OUT, sebagai keluaran yang dihubungkan pada pin 2 dan 3 pada Raspi Board yang akan memberikan logika high (1) dan Low (0) untuk mendeteksi adanya objek.
• Sensor proximity active low (0).
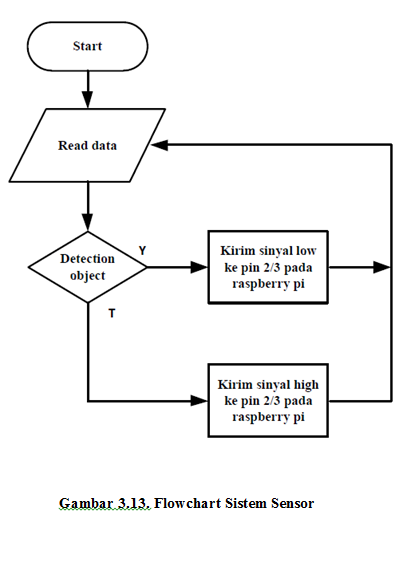
Algoritma Sistem :
Rangkaian Pengendali Motor DC
Pada rangkaian pengendali motor DC ini, ditampilkan bagaimana IC L298N dihubungkan ke dua buah motor DC agar dapat merubah arah putaran motor dengan memberikan polaritas yang terbalik, yang akan menghasilkan motor dapat bergerak dengan arah berlawanan. Sehingga robot dapat bergerak maju dan mundur.
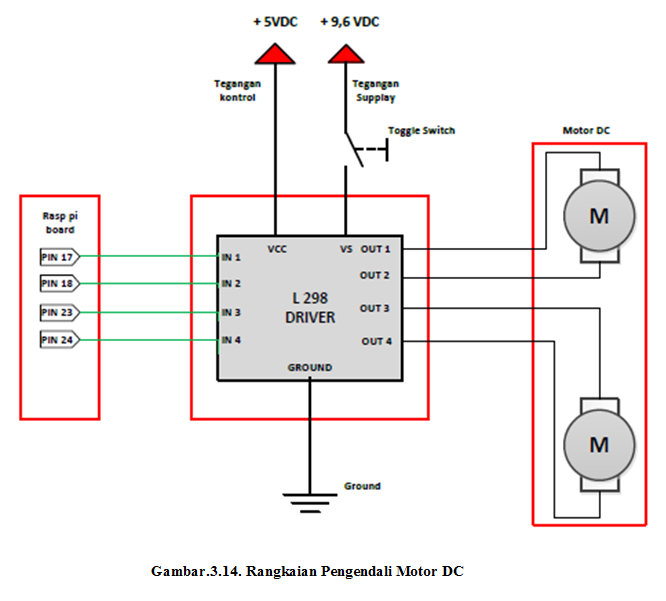
Prinsip kerja dari rangkaian pengendali motor DC ini dapat dilihat pada tabel 3.3 berikut ini .
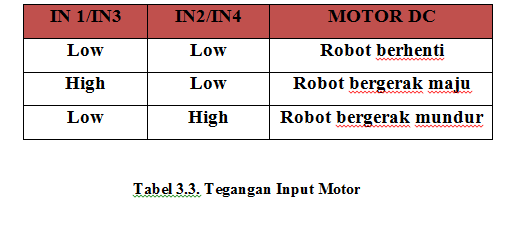
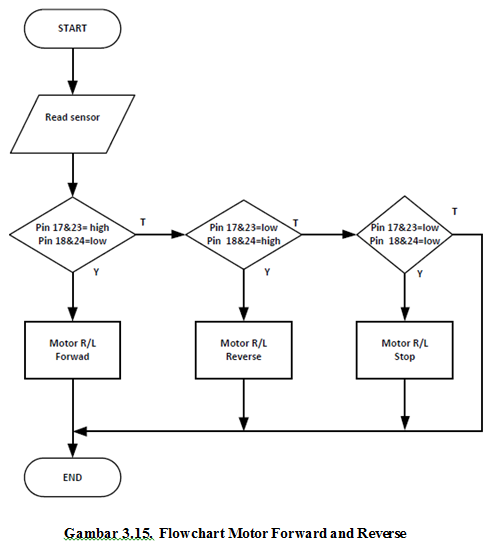
Algoritma Sistem ;
Rangkaina Pengendali Motor Micro Pump
Rangkaian pengendali relay dibutukan karena tidak mencukupinya tegangan dari output raspberry pi, oleh kerena itu dibutuhkannya proses switching tegangan. Tentunya sesuai spesifikasi tegangan kerja motor micro pump. Untuk lebih jelas dapat dilihat pada gambar 3.16
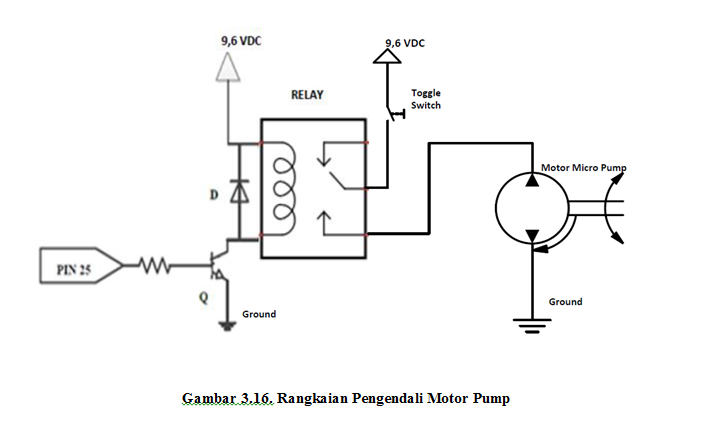
Keterangan :
• Supply tegangan relay : +9,6 VDC.
• Tegangan control : +5 VDC.
• Supply tegangan motor micro pump : +6 Volt DC sampai +12 Volt DC.
• Pin output raspberry pi : Pin 25.
• D : Dioda.
• Q : Transistor NPN.
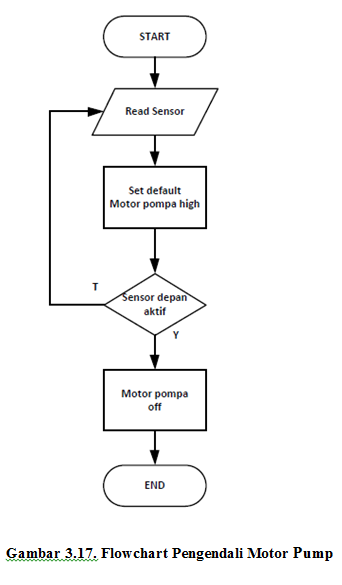
Algoritma Sistem :
Instalasi Webcam
Webcam digunakan sebagai jembatan pada sistem untuk melakukkan proses monitoring secara real time. Untuk proses instalasi webcam tidak begitu sulit, dikarenakan pada board raspberry telah tersedia port USB yang digunakan untuk kebutuhan koneksi pada raspberry pi. Pada gambar 3.18 merupakan cara koneksi webcam pada board raspberry pi.
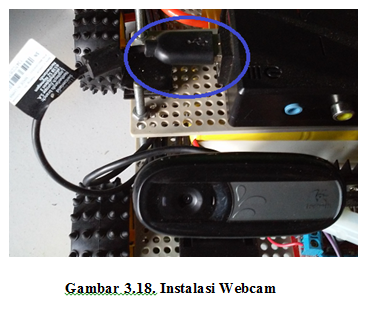
Instalasi USB Wireless Adapter
USB wireless Adapter digunakan sebagai media komunikasi antara raspberry pi dengan perangkat lain seperti smart phone dengan menggunakan jaringan WiFi. Untuk proses instalasi tidak begitu sulit dikarenakan pada board raspberry pi sudah tersedia dua buah port USB yang dapat dihubungkkan untuk kebutuhan komunikasi pada board raspberry pi. Pada gambar 3.19 merupakan cara koneksi USB wireless adapter pada board raspberry pi.
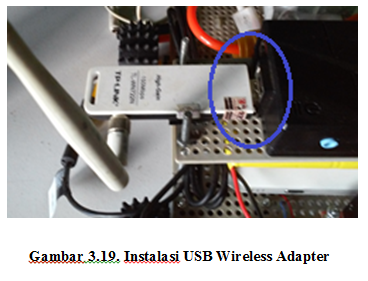
Perancangan Perangkat Lunak
Pada sub bab ini akan membahas tentang perancangan perangkat lunak (Software), perancangan listing program untuk kebutuhan pengontrolan motor DC dan motor micro pump, pembacaan masukan dari masing-masing sensor atau perangkat masukan (input), perancangan untuk kebutuhan visualisasi dari raspberry pi dan kebutuhan aplikasi pada sistem Untuk lebih lengkap tentang pembahasan dari masing-masing perancangan tersebut dapat dilihat pada masing-masing sub bab sebagai berikut:
Perancangan Tampilan Layar
Dalam pembuatan tampilan antarmuka penulis terlebih dahulu membuat rancangan tampilan layar dengan tujuan mempermudah pada saat pembuatan tampilan layar antar muka, penulis membuat tiga tampilan atau layer, berikut ini adalah form tampilan yang penulis buat :
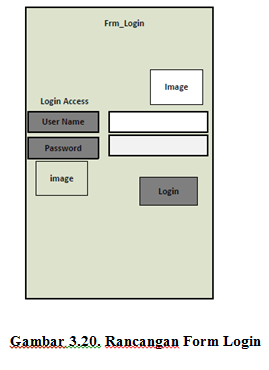
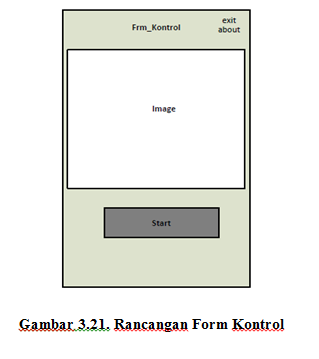

Dari hasil perancangan tampilan layar penulis membuat flowchart sistem login agar memudahkan ketika pada saat pemograman nanti, berikut ini adalah flowchart sistem login :
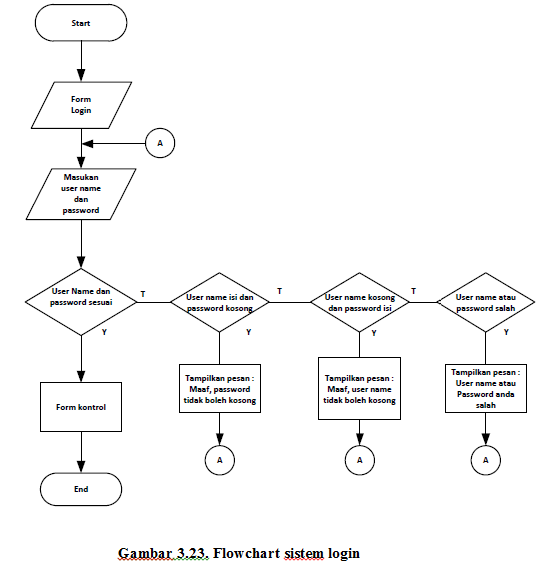
Algoritma Sistem :
IDE Basic4android
Dalam perancangan pembuatan user interface application untuk Operating Sistem android. IDE ( integrated Development Environment) yang di pergunakan adalah Basic4android. Langkah-langkah dalam pembuatan aplikasi ini adalah sebagai berikut:
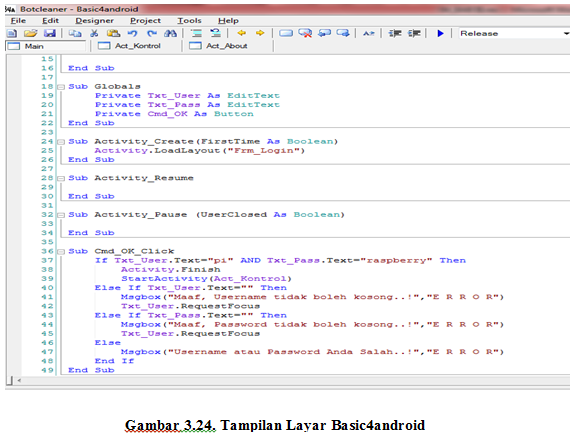

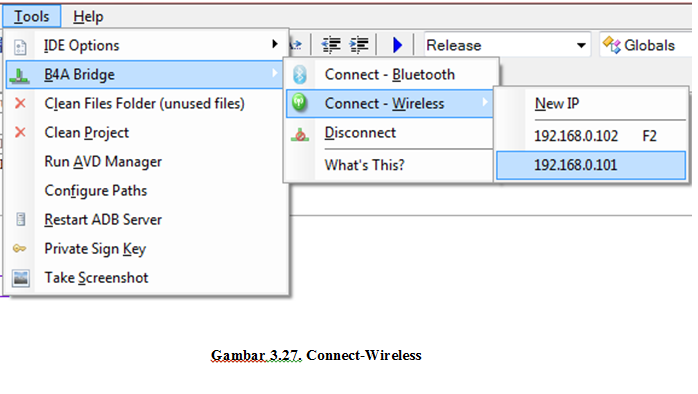
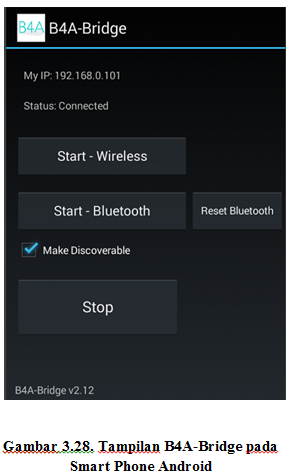
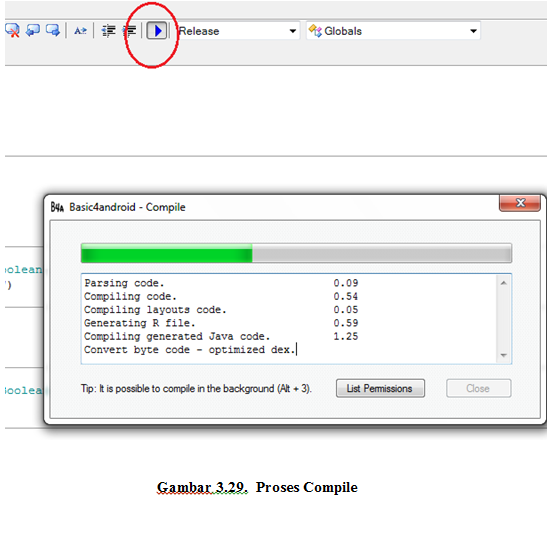

Perancangan Program Python
Dalam perancangan program python penulis menggunakan aplikasi putty , berikut ini configurasi putty.
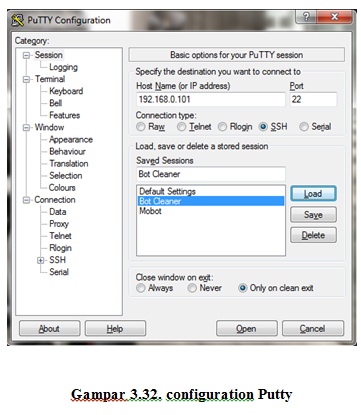
Pada kolom nama host masukan ip address raspberry pi, port 22, dengan koneksi ssh, setelah sudah terisi dengan benar lalu klik open, maka akan terhubung dengan raspberry pi. Untuk mengakses raspberry pi terlebih dahulu login seperti pada gambar 3.33 sebagai berikut.
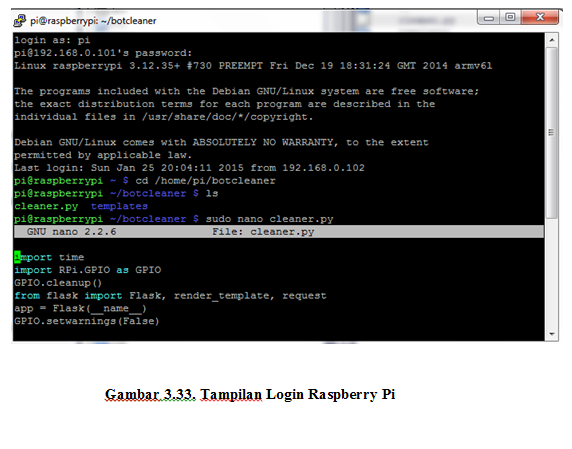
Setelah login berhasil penulis dapat memulai pemograman phyton, penulis menyimpan program yang sudah di buat dalam folder home/pi/botcleaner. Berikut ini adalah tampilan listing program phyton.
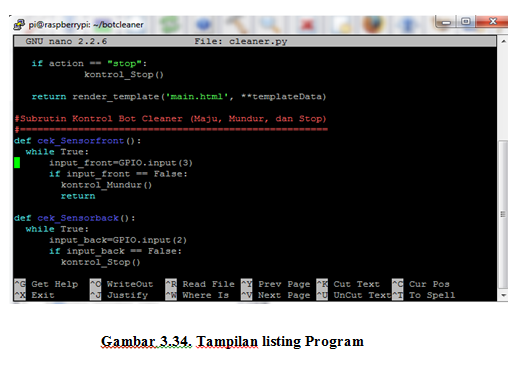
Configurasi Raspberry pi
Agar Raspberry Pi terhubung dengan jaringan terlebih dahulu melakukan configurasi Wifi berikut ini langkah – langkahnya :
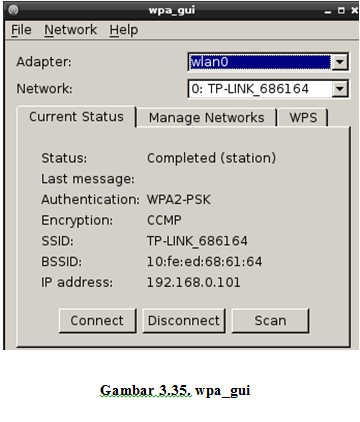
SSH adalah protokol jaringan yang memungkinkan pertukaran data melalui saluran aman antara dua buah perangkat jaringan, pada raspberry pi dipergunakan untuk pengontrolan jarak jauh melalui jaringan lokal. Berikut ini configurasi SSH menggunakan Putty.Untuk mengaktifkan SSH dapat di setting pada rasp pi configure dengan mengetikan perintah sebagai berikut “sudo raspi-config”.
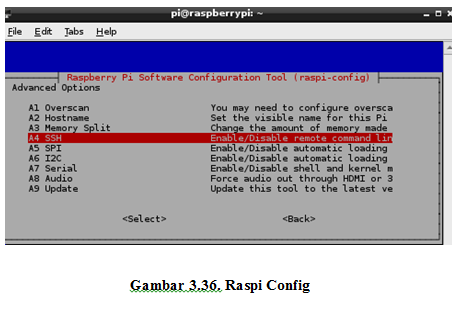
Agar robot dapat menampilkan gambar secara real time, dibutukan aplikasi yang terinstal pada raspberry pi, berikut ini adalah langkah – langkah install MJPG Streamer pada raspberry.
sudo apt-get update
sudo apt-get install subversion
sudo apt-get install libjpeg8-dev
sudo apt-get install imagemagick
/home/pi
cd /home/pi
Sudo svn co https://mjpg streamer.svn.sourceforge.net/svnroot/mjpg-streamer mjpg-streamer make
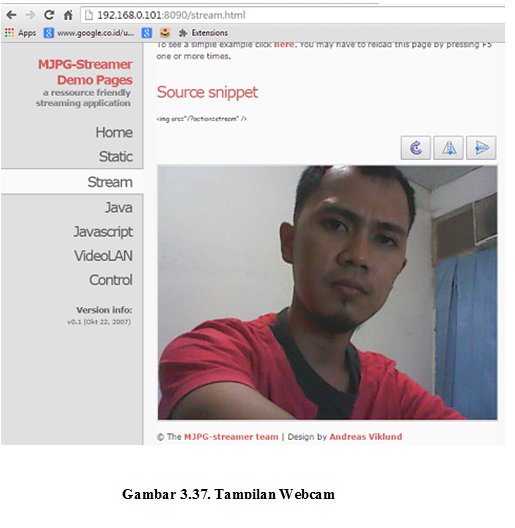
Permasalahan yang Dihadapi dan Alternatif Pemecahan Masalah
Permasalahan yang Dihadapi
Pada sistem tenaga surya permasalahan sering timbul adalah masalah debu yang menempel dipermukaan panel tata surya sehingga dapat memperngaruhi dari kinerja panel tata surya, sehingga harus sesering mungkin dibersihkan. Untuk membersihkan panel tata surya dalam jumlah sedikit mungkin mudah, akan tetapi jika jumlah nya cukup banyak, akan mengalami kusulitan dalam membersihkannya.
Kendala sistem yang sedang berjalan adalah sebagai berikut :
• Dimensi dari panel tata surya cukup luas
• Membutuhkan jumlah pekerja lebih dari satu untuk membersihkan panel tata surya
• Kesulitan dalam memantau atau pengecekan panel tata surya
Alternatif Pemecahan Masalah
Pemecahan masalah yang penulis tawarkan adalah perlunya suatu alat yang bekerja secara otomatis penulis menyebutnya sebagai robot. Suatu robot yang dapat mempermudah pekerjaan manusia, khususnya dalam hal membersihkan panel tata surya.
Pemecahan masalah yang dapat diselesaikan oleh robot pembersih panel solar cell adalah sebagai berikut :
• Robot dapat menjangkau seluruh permukaan panel tata surya, karena dilengkapi dengan wiper pembersih yang dapat diganti sesuai dengan luas permukaan panel tata surya
• Cukup membutuhkan satu orang operator dalam pengoperasiannya, karna robot dilengkapi dengan sensor sehingga dapat bekerja secara otomatis
• Robot ini dilengkapi dengan webcam sehingga operator / user dapat monitoring secara real time.
User Requirement
Elisitasi Tahap I
Elisitasi tahap I disusun berdasarkan hasil wawancara dengan stakeholder mengenai rancangan sistem pengontrolan robot pembersih panel solar cell.
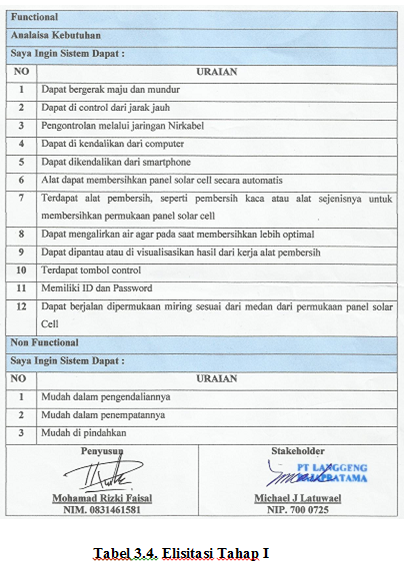
Elisitasi Tahap II
Elisitasi tahap II dibentuk berdasarkan Elisitasi Tahap I yang kemudian diklasifikasikan lagi dengan menggunakanmetode MID.
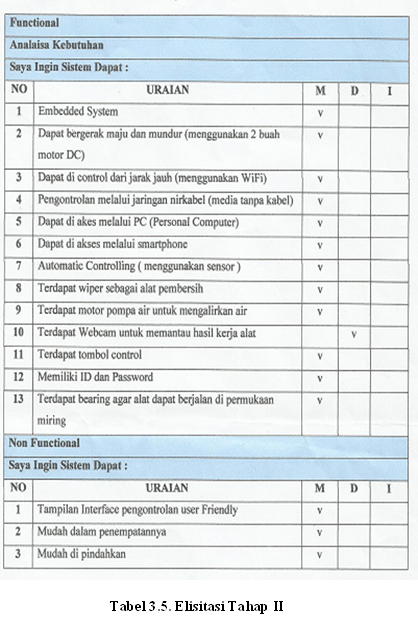
Keterangan :
M : Mandatory
D : Desirable
I : Nessential
Elisitasi Tahap III
Berdasarkan Elisitasi Tahap II, dibentuklah elisitasi tahap III yang di klasifikasi kembali dengan menggunakan metode TOE.
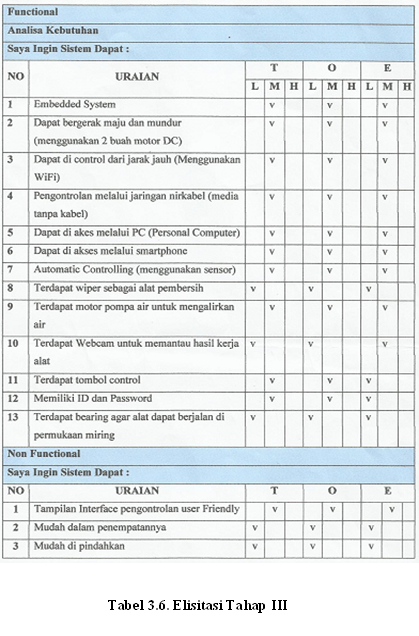
Keterangan :
T : Technical
O : Operational
E : Economic
L : Low
M : Middle
H : High
Final Draft Elisitasi
Final elisitasi merupakan bentuk akhir dari tahap tahap elisitasi yang dapat dijadikan acuan dan dasar pengembangan sistem pengontrolan robot pembersih panel solar cell. Berdasarkan elisitasi tahap III, dihasilkan 13 fungtion dan 3 non fungtion final elisitasi yang diharapkan dapat mempermudah dalam membuat suatu sistem pengontrolan robot.
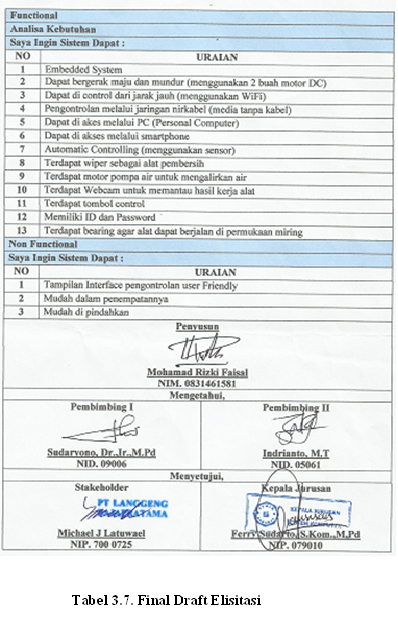
BAB IV
Uji Coba
Pada bab ini akan membahas tentang proses uji coba dari masing-masing rangkaian dan proses demi proses yang dilakukan oleh sistem untuk dapat memastikan bahwa perangkat keras dan perangkat lunak yang telah dibuat dapat bekerja dengan baik dan dapat digunakan serta satu sama lain kompak dalam menjalankan sistem sesuai dengan perancangan sistem.
Metode Black Box
Pengujian ini menggunakan metode black box, adalah pengujian yang menitik beratkan kepada persyaratan fungsional, bertujuan agar hasil yang didapatkan sesuai dengan harapan, berikut ini item – item yang dimasukkan dalam pengujian black box.
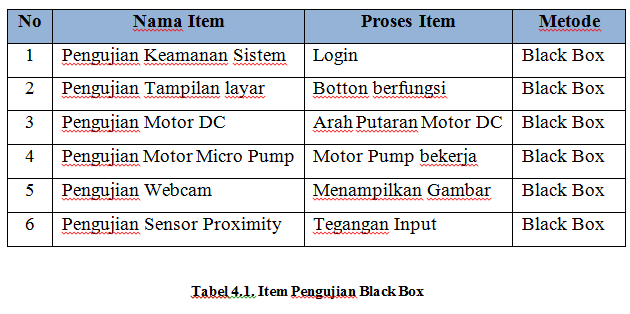
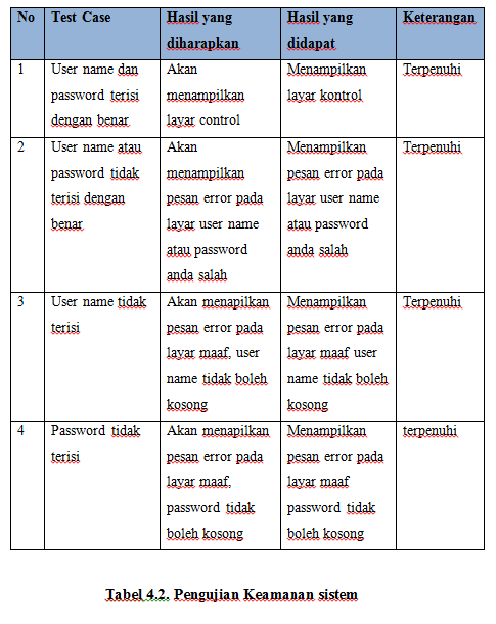
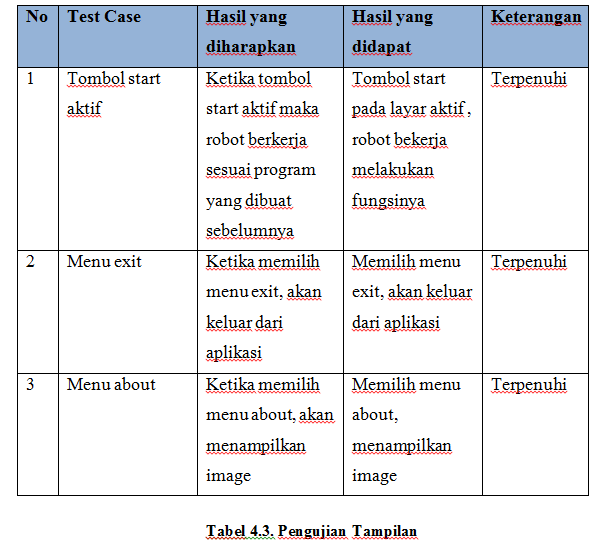
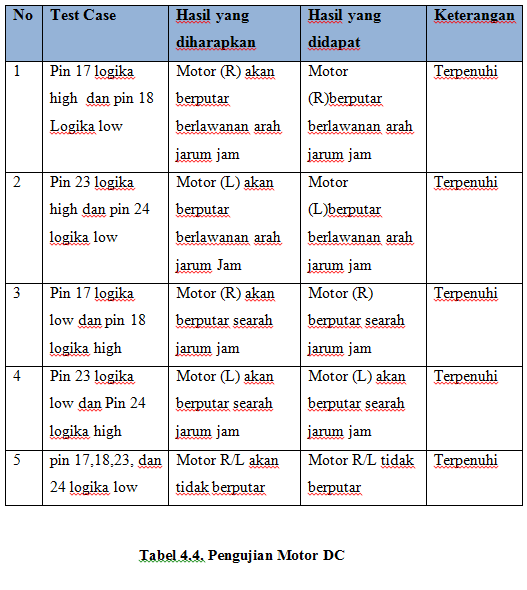
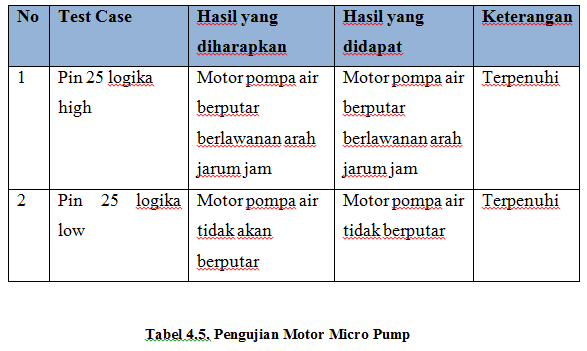
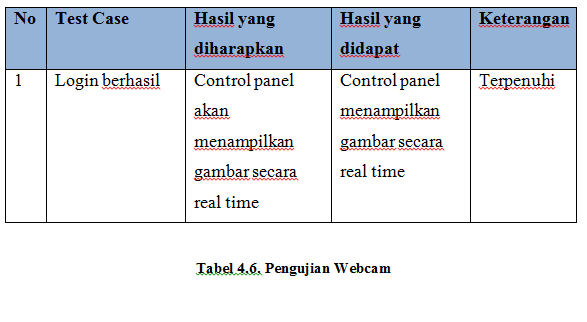
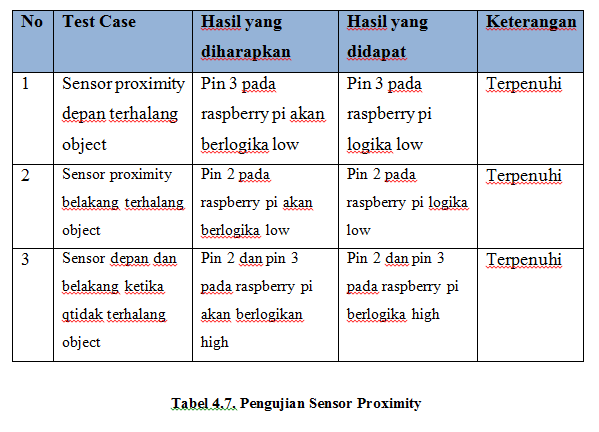
Pengujian Catu Daya
Pada catu daya tidak dimaksukan dalam item pengujian black box, karna diluar sistem fungsional. Akan tetapi penulis tetap memberi penjelasan tentang tegangan suplai yang didapat dari robot. Catu daya sebagai suplai tegangan kerja merupakan bagian yang sangat penting. Dalam realisasi perangkat keras yang berupa motor DC, Sensor Proximity dan Relay disini membutuhkan catu daya yang besarnya adalah +9,6 volt dan +5 volt. Gambar 4.1 adalah merupakan gambar dua buah baterai dengan kapasitas 700 mAh dengan tegangan 9,6 volt dan baterai dengan kapasitas 10.000 mAh dengan tegangan 5 volt, berikut dengan titik yang berikan dengan tanda angka yang kemudian akan ditampilkan dari hasil pengujian tersebut berdasarkan angka yang tertera pada rangkaian tersebut.
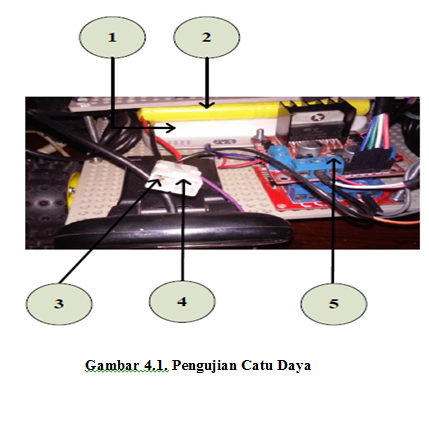
Dari hasil pengujian pada gambar rangkaian didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :
Dari hasil pengujian rangkaian catu daya didapatkan hasil yang masih dalam batas toleransi yang diizinkan, sehingga pada rangkaian catu daya ini sudah dapat digunakan dengan baik.
Pengujian Rangkaian Pengendali Motor DC
Rangkaian pengendali motor DC dibutuhkan untuk mengendalikan arah pergerakan robot. Pada robot terdapat dua buah motor penggerak yang bekerja secara bersamaan. Gambar 4.2 merupakan gambaran dari rangkaian motor penggerak berikut dengan titik yang berikan dengan tanda angka yang kemudian akan ditampilkan dari hasil pengujian tersebut berdasarkan angka yang tertera pada rangkaian tersebut.
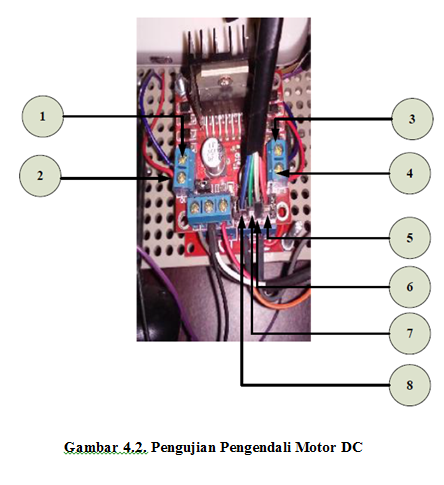
Dari hasil pengujian pada gambar rangkaian didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :Dari hasil pengujian pada gambar rangkaian didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :
Untuk lebih jelas dapat melihat pada tabel arah gerak robot pada tabel 4.8 dan tabel 4.9, yang menjelaskan status pergerakan robot.
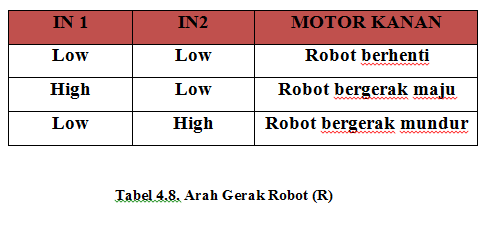
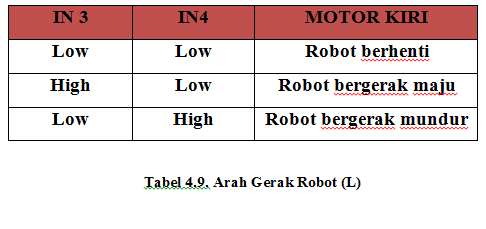
Dari hasil pengujian tersebut dipastikan bahwa rangkaian pengendali motor DC dapat bekerja dengan baik dan siap digunakan untuk keperluan sistem pada robot pembersih panel solar cell.
Pengujian Relay Pengendali Motor Micro Pump
Dikarenakan nilai dari tegangan motor pump berbeda dengan nilai dari tegangan pin output raspberry pi maka dibutuhkan rangkaian relay pengendali motor micro pump. Mengacu pada gambar 4.3 pengujian dilakukan dengan memberikan tegangan yang berbeda terhadap rangkaian relay pengendali. Berikut ini penjelasan beserta dengan titik yang diberikan tanda angka yang kemudian akan ditampilkan dari hasil pengujian tersebut berdasarkan angka yang tertera pada rangkaian tersebut
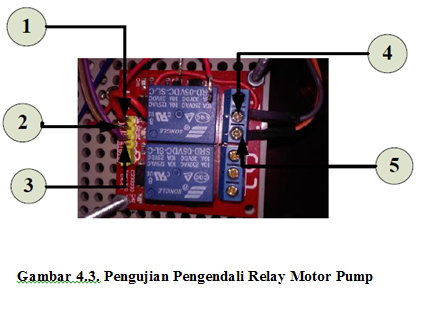
Dari hasil pengujian pada gambar rangkaian didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :
Dari hasil pengujian tersebut dipastikan bahwa rangkaian pengendali motor relay micro pump dapat bekerja dengan baik dan siap digunakan untuk keperluan sistem pada robot pembersih panel solar cell.
Pengujian Sensor Proximity
Sensor proximity adalah sebagai suatu masukan pada sistem kendali robot, tegangan kerja pada proximity adalah +5 volt DC. Gambar 4.4 adalah merupakan gambar sensor proximity berikut dengan titik yang berikan dengan tanda angka yang kemudian akan ditampilkan dari hasil pengujian tersebut berdasarkan angka yang tertera pada rangkaian tersebut.
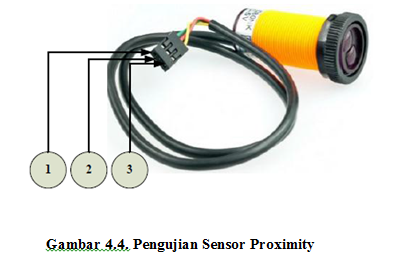
Dari hasil pengujian pada gambar rangkaian didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :
Pengujian Pin GPIO Raspberry Pi
Pengujian pin GPIO dengan memperhatikan perubahan waran pin, untuk active high pin berwarna kuning dan untuk active low pin berwarna hitam, berikut ini adalah status state pin GPIO pada raspberry Pi
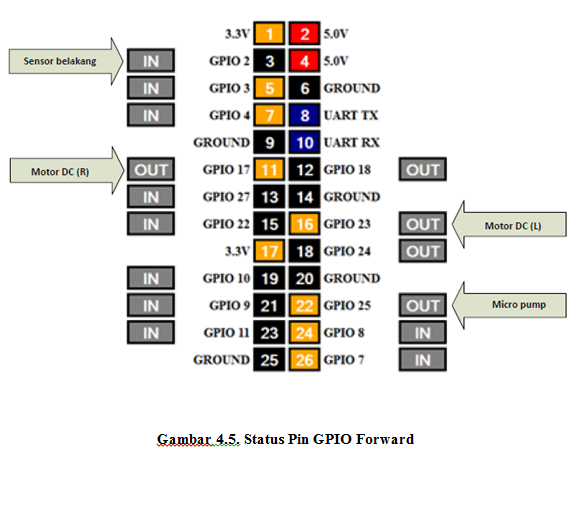
Penjelasan status pin GPIO :
• Pin input 2 active low
• Pin output 17 active high
• Pin output 23 active high
• Pin output 25 active high
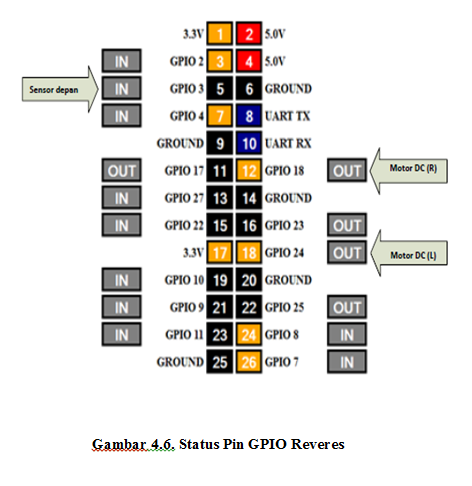
Penjelasan status pin GPIO :
• Pin input 3 active low
• Pin output 18 active high
• Pin output 24 active high
Pada status robot home dimana robot kembali pada posisi awal, untuk lebih jelas dapat dilihat pada gambar. 4.7 sebagai berikut.
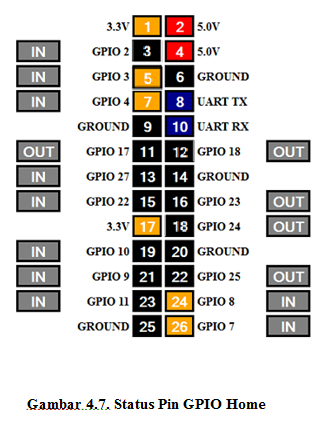
Dari hasil pengujian pin – pin GPIO pada raspberry pi dapat didapatkan hasil yang masih dalam batas toleransi yang diijinkan, sehingga pin GPIO pada raspberry pi dapat dipergunakan sebagai input dan output pada robot.
Pengujian Login
Pengujian login dilakukan dengan menjalankan aplikasi android yang sudah dibuat sebelumnya. Berikut ini tahapan pengujian yang penulis lakukan.
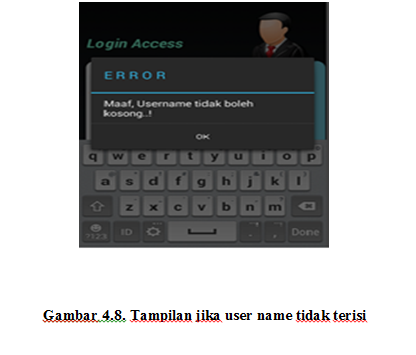
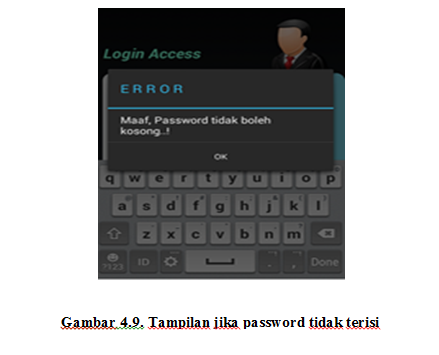
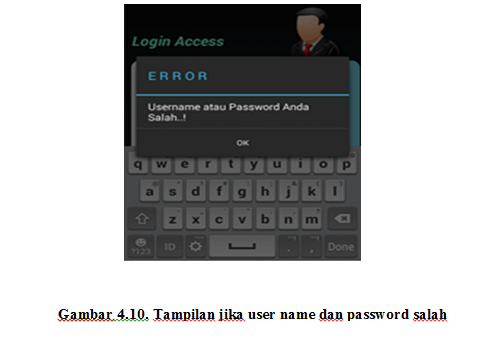
Pengujian Webcam
Proses pengujian dilakukan dengan menjalankan program aplikasi yang sudah dibuat sebelumnya, untuk lebih jelasnya dapa dilihat pada gambar, sebagai berikut.
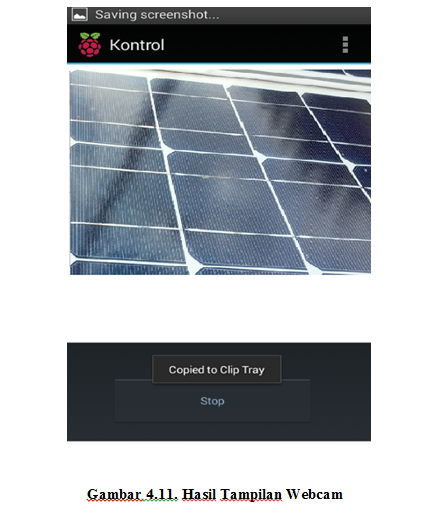
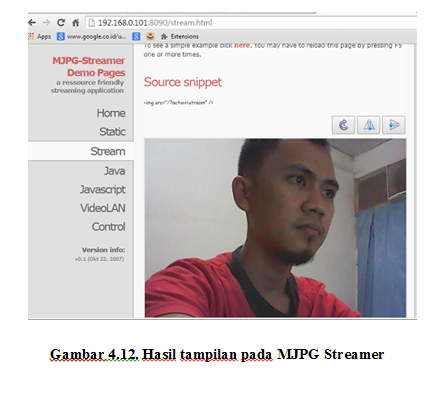
Dari hasil yang di dapat diketahui Webcam pada robot bekerja dengan baik dan dapat dijadikan sebagai alat monitoring panel surya.
Flowchart Program
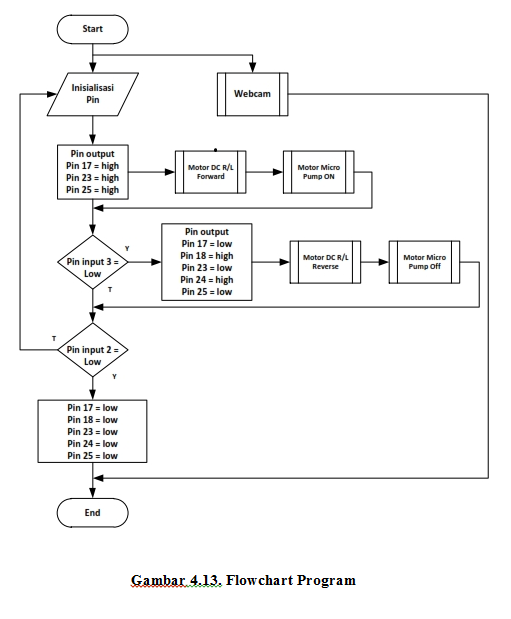
Algoritma Program :
• Pin 17 : high
• Pin 23 : high
• Pin 25 : high
• Jika status low, pin output 17,23,25 low dan pin output 18, 24 high.
• Jika tidak, check status pin input 2.
• Jika status low, pin output 17,18,23,24,25, Low
• Jika tidak loop.
Analisa Sistem
Analisa Program Python
GPIO.setup(2,GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(3,GPIO.IN, pull_up_down=GPIO.PUD_UP)
===============================================untuk kontrol roda kanan
GPIO.setup(17,GPIO.OUT)
GPIO.setup(18,GPIO.OUT)
================================================untuk kontrol roda kiri
GPIO.setup(23,GPIO.OUT)
GPIO.setup(24,GPIO.OUT)
================================================untuk kontrol pompa air
GPIO.setup(25,GPIO.OUT)
===============================================keterangan penggunaan pin
pins = {
2 : {'name' : 'Sensor Depan', 'state' : GPIO.HIGH},
3 : {'name' : 'Sensor Belakang', 'state': GPIO.HIGH},
17 : {'name' : 'IN 1', 'state' : GPIO.LOW},
18 : {'name' : 'IN 2', 'state' : GPIO.LOW},
23 : {'name' : 'IN 3', 'state' : GPIO.LOW},
24 : {'name' : 'IN 4', 'state' : GPIO.LOW},
25 : {'name' : 'Motor Pompa', 'state' : GPIO.LOW}
}
==================================================
def cek_Sensorfront():
while True:
input_front=GPIO.input(3)
if input_front == False:
kontrol_Mundur()
return
def cek_Sensorback():
while True:
input_back=GPIO.input(2)
if input_back == False:
kontrol_Stop()
return
def kontrol_Maju():
GPIO.output(17,GPIO.HIGH)
GPIO.output(18,GPIO.LOW)
GPIO.output(23,GPIO.HIGH)
GPIO.output(24,GPIO.LOW)
GPIO.output(25,GPIO.HIGH)
return
def kontrol_Mundur():
GPIO.output(17,GPIO.LOW)
GPIO.output(18,GPIO.LOW)
GPIO.output(23,GPIO.LOW)
GPIO.output(24,GPIO.HIGH)
GPIO.output(25,GPIO.HIGH)
def kontrol_Stop():
GPIO.output(17,GPIO.LOW)
GPIO.output(18,GPIO.LOW)
GPIO.output(23,GPIO.LOW)
GPIO.output(24,GPIO.LOW)
GPIO.output(25,GPIO.LOW)
return
=====================================================
@app.route("/<action>")
def action(action):
if action == "start":
kontrol_Maju()
cek_Sensorfront()
while false:
input_back=GPIO.input(2)
if input_back == True:
cek_Sensorback()
if action == "stop":
kontrol_Stop()
Analisa Program Basic4android
Sub Cmd_OK_Click
If Txt_User.Text="pi" AND Txt_Pass.Text="raspberry" Then
Activity.Finish
StartActivity(Act_Kontrol)
Else If Txt_User.Text="" Then
Msgbox("Maaf, Username tidak boleh kosong..!","E R R O R")
Txt_User.RequestFocus
Else If Txt_Pass.Text="" Then
Msgbox("Maaf, Password tidak boleh kosong..!","E R R O R")
Txt_User.RequestFocus
Else
Msgbox("Username atau Password Anda Salah..!","E R R O R")
End If
End Sub
Sub Globals
Private Webcam As WebView
Private Cmd_Kontrol As Button
Private Webkontrol As WebView
End Sub
Sub Activity_Create(FirstTime As Boolean)
Activity.LoadLayout("Frm_Kontrol")
' untuk menampilkan Menu
Activity.AddMenuItem("Exit", "mnuExit")
Activity.AddMenuItem("About", "mnuAbout")
================================================
Webcam.LoadUrl("http://192.168.0.102")
Sub Cmd_Kontrol_Click
Webkontrol.LoadUrl("http://192.168.0.102:8080/start")
End Sub
Sub Activity_Create(FirstTime As Boolean)
Activity.LoadLayout("Frm_About")
End Sub
Sub ImageView1_Click
Activity.Finish
StartActivity(Act_Kontrol)
End Sub
Tampilan Robot dan Kontrol Antar Muka
Tampilan Robot Pembersih Panel Solar Cell
Pada gambar 4.14 adalah hasil jadi robot pembersih panel solar cell yang dilengkapi dengan webcam sebagai monitoring dan sensor proximity sebagai kendali otomatis.
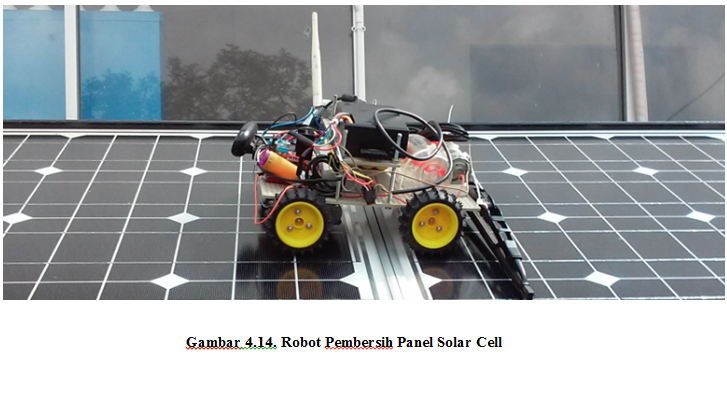
Tampilan Kontrol Antar Muka
Penulis memberikan login access untuk keamanan, pada login access, user diharuskan mengisi kolom user name dan password dengan benar.
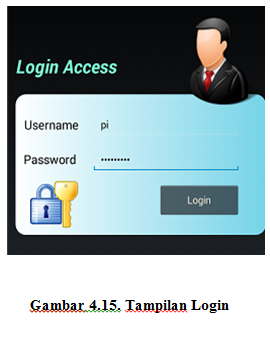
Pada tampilan layar control, terdapat layar untuk menampilkan gambar yang dihasilkan oleh webcam dan terdapat tombol start dan stop dalam satu button.
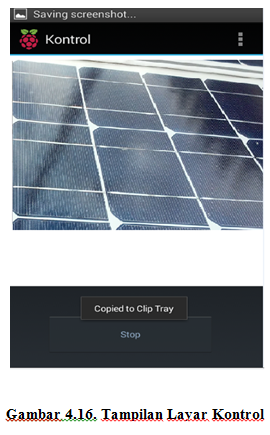
Pada tampilan layar about penulis menampilkan foto penulis, dan untuk keluar layar about cukup click foto penulis, maka akan kembali pada layar control.
Implementasi
Schedule
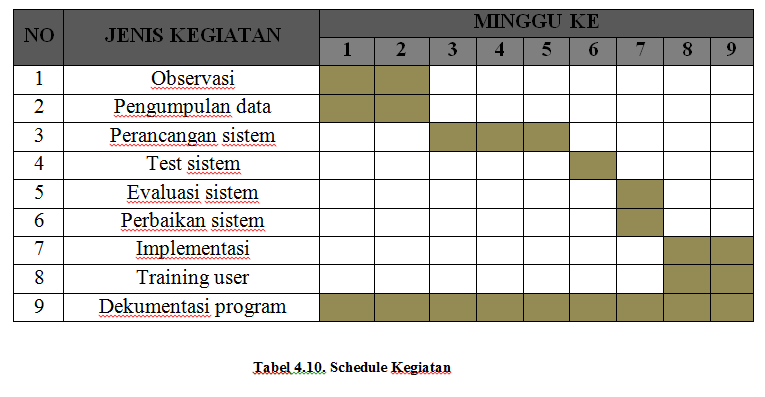
Estimasi Biaya

BAB V
Kesimpulan
Secara keseluruhan dari hasil pengamatan, percobaan dan pembahasan dapat diambil kesimpulan sebagai berikut :
Kesimpulan Terhadap Rumusan Masalah
Kesimpulan Terhadap Tujuan dan Manfaat Penelitian
Kesimpulan terhadap metode penelitian
Saran
Dengan melihat kesimpulan diatas, ada beberapa saran yang diberikan yaitu sebagai berikut :
Kesan
Adapun kesan yang didapatkan setelah melakukan penelitian dan penulisan skripsi ini, sebagai berikut :
DAFTAR PUSTAKA
DAFTAR LAMPIRAN
LAMPIRAN A
Pada lampiran A ini berisi berkas - berkas yang diperlukan sebagai persyaratan skripsi, diantaranya yaitu :
A.1 Form Validasi Skripsi
A.2 Foto Copy Surat Pengantar Observasi Skripsi
A.3 Foto Copy Form Pengajuan Judul Skripsi
A.4 Form Penggantian Judul Skripsi
A.5 Kartu Bimbingan
A.6 Kartu Study Tetap Final (KSTF)
A.7 Foto Copy bukti pembayaran SKS skripsi dan bimbingan skripsi
A.8 Foto Copy bukti pembayaran sidang skripsi dan raharja career
A.9 Validasi Sidang Akademik
A.10 Daftar Mata Kuliah Yang Belum Diambil
A.11 Daftar Nilai
A.12 Formulir Seminar Proposal Skripsi
A.13 Formulir Penilaian Objektif
A.14 Surat keterangan Jurnal
A.15 Sertifikat TOEFL
A.16 Sertifikat Prospek
A.17 Sertifikat Nasional
A.18 Sertifikat Pelatihan
A.19 Sertifikat Raharja Career 2015
A.20 Foto Copy Ijazah Terakhir
A.21 Curriculum Vitae (CV)
LAMPIRAN B
Lampiran B ini berisi berkas - berkas yang berhubungan dengan penelitian, diantaranya yaitu :
B.1 Surat Keterangan Observasi pada PT Langgeng Baja Pratama
B.2 Surat Keterangan Implementasi pada PT langgeng Baja Pratama
B.3 Surat Keterangan Hiba pada PT Langgeng Baja Pratama.
B.4 Formulir Pertemuan Stakeholder.
LAMPIRAN C
pada lampiran C ini berisi tentang berkas atau bukti pada saat observasi, diantaranya yaitu :
C.1 Form Wawancara
C.2 Form Elisitasi Tahap I
C.3 Form Elisitasi Tahap II
C.4 Form Elisitasi Tahap III
C.5 Form Draft Final Elisitasi
C.6 Form Uraian Pekerjaan
LAMPIRAN D
Pada lampiran D ini berkas - berkas berupa foto atau print screen hasil rancangan yang ada pada bab IV :
D.1 Print Screen Layar Login
D.2 Print Screen layar Kontrol
D.3 Print Screen Layar About
D.4 Print Screen Icon Aplikasi Android
D.5 Foto Robot Pembersih Panel Solar Cell
D.6 Video Robot Pembersih Panel Solar Cell