SI1331476542

PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON
ORGANIK PADA KELURAHAN
PORIS PLAWAD UTARA

Disusun Oleh :
NIM |
: 1331476542
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI KOMPUTER SISTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2017/2018
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTYPE PEMILAH SAMPAH ORGANIK
DAN NON ORGANIK PADA KELURAHAN
PORIS PLAWAD UTARA
Disusun Oleh :
NIM |
: 1331476542
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Komputer Sistem
|
Disahkan Oleh :
Tangerang, 20 Juli 2017
| Ketua |
Kepala Jurusan
| ||||
| STMIK RAHARJA |
Jurusan Sistem Komputer
| ||||
| (Ir. Untung Rahardja, M.T.I) |
(Ferry Sudarto, S.Kom. M.Pd)
| ||||
| NIP : 000594 |
NIP : 079010
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON
ORGANIK PADA KELURAHAN PORIS PLAWAD UTARA
Dibuat Oleh :
NIM |
: 1331476542
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Komputer Sistem
Tahun Akademik 2017/2018
Disetujui Oleh :
Tangerang, 20 Juli 2017
| Pembimbing I |
Pembimbing II
| ||
| NID : 10001 |
NID : 16003
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON
ORGANIK PADA KELURAHAN PORIS PLAWAD UTARA
Dibuat Oleh :
NIM |
: 1331476542
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Komputer Sistem
Tahun Akademik 2017/2018
Disetujui Penguji :
Tangerang, ………………2017
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
Yang bertanda tangan dibawah ini,
NIM |
: 1331476542
|
Nama |
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Komputer Sistem
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab serta bersedia menerima sanksi jika ternyata pernyataan diatas tidak benar.
Tangerang, 20 Juli 2017
| NIM : 1331476542
|
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Sampah adalah material sisa yang dibuang, berasal dari kegiatan manusia dan tidak terbentuk dengan sendirinya. Sampah menjadi masalah yang jarang di perhitungkan oleh masyarakat.Banyak dampak buruk yang di timbulkan oleh sampah.Sampah terbagi menjadi dua yaitu sampah organik dan sampah non organik.Sampah non organik adalah sampah yang tidak mudah membusuk.Sampah non norganik bisa di daur ulang, dengan mendaur ulang sampah non organik maka jumlah sampah dapat berkurang.Logam, plastik, dan kertas merupakan sampah non organik yang masih bisa di daur ulang.Sampah organik merupakan sampah yang dapat terurai secara alami, artinya bahan sampah tersebut dapat membusuk tanpa harus di daur ulang. Sampah organik dihasilkan dari kegiatan rumah tangga seperti proses memasak, pertanian, kotoran hewan, dan sebagainya. Sampah organik ini lebih ramah terhadap lingkungan karena secara alami akan terurasi oleh bakteri. Untuk memudahkan pendaur ulang, hal pertama yang harus dilakukan adalah memisahkan jenis sampah tersebut secara otomatis.Untuk mengatasi masalah tersebut maka perlu di buat suatu alat yang dapat memisahkan sampah organik dan non organik secara otomatis. Yaitu dengan meggunakan Sensor Warna sebagai pemisah jenis warna sampah organik dan non organik, Sensor Metal sebagai pendeteksi objek metal atau sampah non organik, Buzzer dan LED sebagai notifikasi ketika salah satu tempat sampah terisi penuh, lalu sensor ultrasonik sebagai pembaca ketinggian sampah, dan LCD sebagai display pada tempat sampah, dan servo yang di kontrol oleh Arduino untuk memberikan kemudahan kepada petugas kebersihan dalam mengetahui tempat sampah telah terisi penuh dengan sampah pada Kelurahan Poris Plawad Utara.
Kata Kunci :Tempat Sampah, Arduino, Organik, Non Organik
ABSTRACT
Trash is waste material that is discarded, derived from human activities and not formed by itself. Garbage is a problem that is rarely taken into account by society. Many bad impacts are caused by garbage. Waste is divided into two, namely organic waste and non-organic waste. Non-organic waste is waste that is not easy to rot. Non-organic waste can be recycled, by recycling non-organic waste then the amount of waste can be reduced. Metals, plastics, and paper are non-organic waste that can still be recycled. Organic waste is a decomposable waste naturally, meaning that the waste material can rot without having to be recycled. Organic waste is produced from household activities such as cooking, agriculture, animal waste, and so on. This organic waste is more environmentally friendly because it is naturally going to be bacterial. To make recycling easier, the first thing to do is to automatically separate the type of trash. To overcome these problems it is necessary to create a tool that can separate organic and non organic waste automatically. Namely by using Color Sensor as a separator of color of organic and non organic waste, Metal Sensor as a detector of metal objects or non organic waste, Buzzer and LED as notification when one of the trash is fully loaded, then ultrasonic sensor as garbage height reader, and LCD as Displays on the dumpster, and servo controlled by Arduino to provide convenience to the janitor in knowing the garbage container has been fully loaded with garbage in Poris Plawad Utara Village.
Keywords :Trash, Arduino, Organic, Non Organic
KATA PENGANTAR
Puji dan syukur penulis panjatkan kehadirat Allah SWT, yang telah memberikan limpahan rahmat, taufik dan hidayah-Nya sehingga penulis dapat menyelesaikan laporan penulisan Skripsi dengan Judul“PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON ORGANIK PADA KELURAHAN PORIS PLAWAD UTARA”. Penulis menyadari dengan sepenuh hati bahwa tersusunnya laporan Skripsi ini bukan hanya atas kemampuan dan usaha penulis semata, namun juga berkat bantuan berbagai pihak, oleh karena itu penulis mengucapkan terima kasih yang sedalam-dalamnya kepada :
- Bapak Ir. Untung Rahardja, M.T.I. selaku Ketua STMIK Raharja.
- Bapak Sugeng Santoso,M.Kom selaku Pembantu Ketua I STMIK Raharja.
- Bapak Ferry Sudarto, S.Kom.,M.Pd selaku Kepala Jurusan Sistem Komputer dan juga sebagai Pembingbing 1 yang telah berkenan memberi bimbingan dan pengarahan kepada penulis sehingga laporan Skripsi ini bisa diselesaikan.
- Bapak Berkat Jaya Batee, S.Kom., MM Selaku Dosen Pembimbing 2 yang telah membimbing dan mendukung penulis selama proses Skripsi.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kedua Orangtua tercinta yang selalu memanjatkan doa dan memberikan segala dukungan moril dan materil.
- Temanteman yang selalu memberikan motivasi kepada penulis dalam penyusunan Skripsi ini.
- Rekanrekan seperjuangan COS FAM’Syang telah memberikan penulis semangat dalam menyelesaikan Skripsi ini.
- Serta semua pihak yang tidak dapat penulis sebutkan satu persatu yang telah ikut membantu dalam penyusunan Skripsi ini.
Penulis berharap mudah-mudahan laporan skripsi ini dapat bermanfaat bagi semua pihak yang memerlukan dan penulis mohon maaf apabila ada kesalahan dalam laporan skripsi ini.
| Tangerang, 20 Juli2017 | |
| Zulfa Fiatikara |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 TEORI UMUM
- 2.2 Teori Khusus
- 2.2.1 Konsep Dasar Mikrokontroler
- 2.2.2 Konsep Dasar Arduino Uno
- 2.2.3 Konsep Dasar Motor Servo
- 2.2.4 Konsep Dasar Sensor Warna TCS3200
- 2.2.5 Konsep Dasar Sensor Metal
- 2.2.6 Konsep Dasar Buzzer
- 2.2.7 Konsep Dasar LED (Light Emitting Dioda
- 2.2.8 Konsep Dasar LCD (Liquid Crystal Display
- 2.2.9 Konsep Dasar Sensor Ultrasonik
- 2.2.10 Konsep Dasar Flowchart
- 2.2.11 Konsep Dasar Pengujian
- 2.2.12 Konsep Dasar Elisitasi
- 2.2.13 Konsep Dasar Komponen Elektronika
- 2.3 Konsep Dasar Literature Review
- 3 BAB III
- 3.1 Gambaran Umum Kelurahan Poris Plawad Utara
- 3.2 Tujuan Perancangan
- 3.3 Tata Laksana Sistem Yang Berjalan
- 3.4 Prosedur Sistem Yang Berjalan
- 3.5 Rancangan Prosedur Sistem Yang Berjalan
- 3.6 Perancangan Alat
- 3.7 Perancangan Perangkat Keras (Hardware)
- 3.8 Konsep Perancangan Perangkat Lunak (Software)
- 3.9 Permasalahan Yang Dihadapi Dan Alternatif Pemecahan Masalah
- 3.10 User Requirement
- 4 BAB IV
- 5 BAB V
- 6 DAFTAR PUSTAKA
DAFTAR SIMBOL
DAFTAR SIMBOL FLOWCHART (DIAGRAM ALIR)

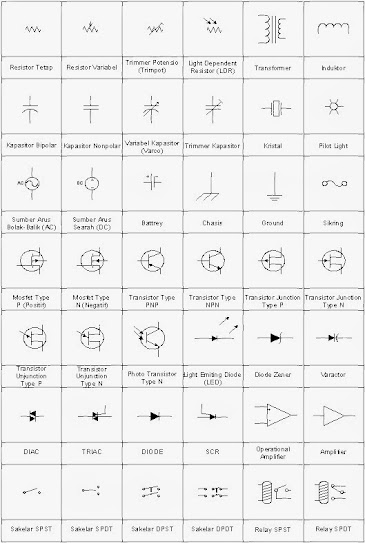
DAFTAR SIMBOL ELEKTRONIKA
DAFTAR TABEL
Tabel 2.1 Spesifikasi Arduino Uno
Tabel 2.2 Kelebihan Dan Kelemahan Black Box
Tabel 2.3Kompnen Elektronika Pasif
Tabel 2.4Komponen Elektronika Aktif
Tabel 3.1 Jumlah Penduduk Menurut Jenis Kelamin, Status Perkawinan Di Kelurahan Poris Plawad Utara Kecamatan Cipondoh Kota Tangerang Pada Bulan Mei 2017
Tabel 3.2 Elisitasi Tahap I
Tabel 3.3 Elisitasi Tahap II
Tabel 3.4 Elisitasi Tahap III
Tabel 3.5 Final Elisitasi
Tabel 4.1Pengujian Black Box Sistem Pada Sensor Warna Membaca Jenis Warna
Tabel 4.2 Pengujian Black Box Sistem Pada Sensor Metal
Tabel 4.3 Rangkaian Pengujian Catu Daya
Tabel 4.4 Pengolahan Jadwal Proses Pembuatan Sistem
Tabel 4.5 Estimasi Biaya Yang Dikeluarkan
DAFTAR GAMBAR
Gambar 2.1 Tahapan Prototype
Gambar 2.2 Arduino Uno
Gambar 2.3 Prinsip Kerja Motor Servo
Gambar 2.4 Motor Servo
Gambar 2.5 Sensor Warna TCS3200
Gambar 2.6 Sensor Metal
Gambar 2.7 Prinsip Kerja Metal Detector
Gambar 2.8 Buzzer Aktif
Gambar 2.9 Simbol Dan Bentuk Fisik LED
Gambar 2.10 LCD (Liquid Crystal Display) 2x16
Gambar 2.11 Sensor Jarak Ultrasonik
Gambar 2.12 Diagram Waktu Sensor PING
Gambar 2.13 Cara Kerja Sensor Ultrasonik
Gambar 2.14 Flowchart Sistem (System Flowchart)
Gambar 2.15 Flowchart Dokumen (Document Flowchart)
Gambar 2.16 Flowchart Skematik (Schematic Flowchart)
Gambar 2.17 Flowchart Program (Program Flowchart)
Gambar 2.18Simbol Flowchart Proses
Gambar 2.19Flowchart Proses (Proses Flowchart)
Gambar 3.1 Kelurahan Poris Plawad Utara
Gambar 3.2 Struktur Organisasi Kelurahan Poris Plawad Utara
Gambar 3.3 Flowchart Sistem Yang Berjalan
Gambar 3.4 Flowchart Sistem Yang Diusulkan
Gambar 3.5 Diagram Blok Rangkaian Alat
Gambar 3.6 Membuka Aplikasi Fritzing
Gambar 3.7 Halaman Utama Fritzing
Gambar 3.8 Menyimpan Project Pada Fritzing
Gambar 3.9 Memasukan Komponen Pada Layar BreadBoard
Gambar 3.10 Rangkaian Power Supply
Gambar 3.11 Rangkaian Sensor Warna
Gambar 3.12 Rangkaian Buzzer
Gambar 3.13 Rangkaian Sensor Metal
Gambar 3.14 Rangkaian Servo
Gambar 3.15 Rangakain LED
Gambar 3.16 Rangkaian Sensor Ultrasonik
Gambar 3.17 Rangkaian LCD Display
Gambar 3.18Rangkaian Keseluruhan
Gambar 3.19Memulai Program Arduino
Gambar 3.20Tampilan Layar Program Arduino 1.8.0
Gambar 3.21Membuka Device Manager
Gambar 3.22Memilih Arduino Uno Pada Port COM
Gambar 3.23Menentukan COM 3 Pada Arduino
Gambar 3.24Memilih Jenis Board Arduino
Gambar 3.25Menyimpan Program Pada Arduino
Gambar 3.26Memilih Lokasi Project
Gambar 3.27Tampilan Listing Program Yang Ditulis
Gambar 3.28Tampilan Listing Program Keseluruhan
Gambar 3.29Proses Kompilasi Listing Program Arduino
Gambar 3.30Tampilan Hasil Proses Kompilasi Listing Program
Gambar 3.31Pemilihan Arduino Broad
Gambar 3.32Mengupload Program Kedalam Modul Arduino
Gambar 3.33Proses Upload Liating Program Sukses
Gambar 4.1Pengujian Catu Daya Untuk Arduino Uno
Gambar 4.2Rangkaian Motor Servo
Gambar 4.3 Listing Program Motor Servo
Gambar 4.4 Pengujia Motor Servo
Gambar 4.5 Rangkaian Sensor Ultrasonik
Gambar 4.6 Listing Program Sensor Ultrasonik
Gambar 4.7Sensor Ultrasonik Ketika Tidak Ada Objek
Gambar 4.8Sensor Ultrasonik Ketika Ada Objek
Gambar 4.9Pengujian LED Indikator
Gambar 4.10Listing Program ‘Blink’ LED indikator
Gambar 4.11Pengujian LED Indikator Saat Mati
Gambar 4.12Pengujian LED Indikator Saat Hidup
Gambar 4.13Rangkaian Buzzer
Gambar 4.14Listing Program Buzzer
Gambar 4.15Buzzer Saat Aktif
Gambar 4.16 Flowchart Sistem Yang Diusulkan
Gambar 4.17Tampilan Listing Program IDE Arduino
Gambar 4.18Upload Program Kedalam Arduino Uno
DAFTAR RUMUS
Rumus 2.1Rumus Cara Kerja Sensor Ultrasonik
Rumus 4.1Rumus Pengujian Catu Daya
BAB I
Latar Belakang
Setiap hari manusia menghasilkan sampah, baik sampah rumah tangga maupun sampah industri yang bermacam-macam bentuk dan jenisnya. Pengolahan sampah yang buruk dapat menyebabkan masalah lingkungan yang merugikan. Sampah akan menjadi masalah karena dapat mengganggu kesehatan manusia, mengganggu dan juga bau busuk , polusi udara karna dapat di timbulkan oleh sampah.
Sampah adalah material sisa yang dibuang, berasal dari kegiatan manusia dan tidak terbentuk dengan sendirinya. Sampah menjadi masalah yang jarang di perhitungkan oleh masyarakat.Banyak dampak buruk yang di timbulkan oleh sampah.Sampah anorganik bisa di daur ulang, dengan mendaur ulang sampah non organik maka jumlah sampah dapat berkurang.Logam, plastik dan kertas merupakan sampah non organik yang masih bisa di daur ulang. Sedangkan, Sampah organik adalah limbah yang berasal dari sisa makhluk hidup (alam) seperti hewan, manusia, tumnuhan yang mengalami pembusukan atau pelapukan.
Sampah ini tergolong sampah yang ramah lingkungan karena dapat di urai oleh bakteri secara alami dan berlangsung cepat. Daun, kayu, kulit telur, bangkai hewan, kotoran hewan dan manuisa merupakan sampah organikuntuk memudahkan pendauran ulang, hal pertama yang harus di lakukan adalah memisahkan jenis sampah tersebut. Dengan di gunakannya pemisah sampah otomatis dapat memudahkan pekerjaan tersebut
Salah satu cara yang sederhana dalam pengolahan sampah adalah dengan menyediakan tampat sampah yang sehat dan menarik yang telah memenuhi kriteria seperti berbahan dasar yang kuat sehingga tahan dari kebocoran dan kerusakan, kemudian memiliki penutup tempat sampah serta dapat memiliah sampah organik dan non organik, yang tidak dapat menimbulkan bau dan merusak lingkungan.
Kurangnya kesadaran masyarakat yang datang untuk mengurus berkas, ketika mereka membuang sampah pada tempatnya, namun tidak memperdulikan jenis sampah tersebut pada tempat sampah yang telah disediakan di Kelurahan Poris Plawad Utara yang berlokasi di Jl.Perumahan Puri No.4, Cipondoh, Kecamatan, Tangerang, Banten,
Berdasarkan latar belakang diatas, maka penulis ingin melakukan sebuah penilitian sederhana yang berjudul “PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON ORGANIK PADA KELURAHAN PORIS PLAWAD UTARA”.
Perumusan Masalah
Berdasarkan latar belakang di atas, maka dibuat rumusan masalah sebagai berikut :
-
Bagaimana cara meningkatkan kesadaran masyarakat tentang pentingnya membuang sampah pada tempat yang telah disediakan ?
-
Bagaimana merancang pemilah tempat sampah organik dan non organik secara otomatis ?
-
Alat yang bagaimanakah yang dapat membantu masyarakat dalam melakukan pemilah sampah organik dan non organik secara otomatis ?
Ruang Lingkup Penlitian
Berdasarkan dari rumusan masalah dan tujuan di atas, maka ruang lingkup penelitian ini sebagai berikut:
-
Pemilah sampah organik dan non organik dengan menggunakan arduino uno sebagai otak utama untuk menginstruksikan terhadap sensor warna, sensor metal.
-
Sensor-sensor tersebut membaca sampah dengan membedakan jenis warna, logam.
-
Memberikan notifikasi suara buzzer dan lampu indikator ketika sampah terisi penuh.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Berdasarkan rumusan masalah di atas, tujuan dari penelitian ini sebagai berikut :
-
Untuk meningkatkan kesadaran masyarakat tentang pentingnya membuang sampah
-
Untuk membiasakan masyarakat agar membuang sampah organik dan non organik
-
Untuk membantu masyarakat dalam melakukan pemilah sampah organik dan non organik secara otomatis
Manfaat Penelitian
Berdasarkan rumusan masalah di atas, manfaat dari penelitian ini sebagai berikut :
-
Kelurahan Poris Plawad Utaralebih tertata rapih dan bersih
-
Dapat mempermudah petugas kebersihan dalam pengambilan sampah, karena sampah sudah terpisah secara otomatis.
-
Dapat menghindari keterlambatan dalam pengambilan sampah.
Metode Penelitian
Dalam penelitian ini, terdapat beberapa metode yang dapat menunjang dalam melakukan penelitian antara lain:
Metode Pengumpulan Data
Metode Observasi
Obseravsi yang dilakukan pada Kelurahan Poris Plawad Utara selama 3 bulan. Selama melakukan observasi didapat suartu data yang meliputi latar belakang kelurahan, visi dan misi, struktur organisasi,
Metode Wawancara
Metode ini dilakukan melalui proses tanya jawab dengan narasumber yaitu sekertaris kelurahan sebagai stackholder yang memiliki keluhan pada aspek kebersihan salah satunya tempat sampah sebagai media penampung sementara.
Metode Studi Pustaka (Library Research)
Metode untuk mendapatkan informasi dan teori-teori yang sesuai dengan sistem yang akan dibuat dengan mencatat, mempelajari dan memahami literature review yang berhubungan dengan penelitian dari berbagai sumber yang tertulis maupun elektronik. Yang digunakan penulis berupa jurnal dan buku-buku.
Metode Analisa.
Pada metode ini, penulis menganalisa tentang cara memisahkan sampah organik dan non organik yang bekerja secara otomatis. Penulis menganalisa dengan melihat faktor sebab dan akibat yang terjadi sehingga memudahkan dalam membuat penelitian.
Metode Perancangan
Dalam metode perancangan ini kita dapat mengetahui bagaimana sistem itu dibuat atau dirancang dan alat apa saja yang dibutuhkan. Melalui tahapan pembuatan flowchartsebagai alur dari sistem yang akan dibuat dan perancangan perangkat lunak (Software) menggunakan program arduino IDE serta perangkat keras (Hardware)berupa rancangan desain diagram blok.
Metode Prototype
Prototyping adalah proses pembuatan model sederhana software yang mengizinkan pengguna memiliki gambaran dasar tentang program serta melakukan pengujian awal. Prototyping memberikan fasilitas bagi pengembang dan pemakai untuk saling berinteraksi selama proses pembuatan, sehingga pengembang dapat dengan mudah memodelkan perangkat yang akan dibuat.
Penulis menerapkan prototype dengan menggunakan evolutionary karena pada metode ini, hasil prototype tidak langsung dibuang tetapi digunakan untuk iterasi desain berikutnya. Dalam hal ini, sistem atau produk yang sebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatas menuju produk final atau produk akhir.
Metode Pengujian
Pada metode pengujian ini yang saya pakai adalah metode pengujian black box, karena berfokus pada domain informasi dari perangkat lunak.Metode pengujian ini berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya: fungsi-fungsi yang salah atau hilang, kesalahan interface, kesalahan dalam struktur data atau akses database, kesalahan performa dan kesalahan validasi data”.
Sistematika Penulisan
Untuk mempermudah dalam hal penyusunan dan dapat dipahami lebih jelas, laporan ini dibagi atas beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub-sub yang akan membahas dan menguraikan masalah yang lebih terperinci. Dengan susunan sebagai berikut:
Pada bab ini berisi tentang latar belakang, rumusan masalah, ruang lingkup, tujuan dan manfaat, metode penelitian dan sistematika penulisan.
Bab ini berisi tentang teori dan literature review yang sesuai dan akurat sehingga bisa mendukung penelitian dalam penulisan sehingga menghasilkan karya tulis yang bernilai ilmiah.
BAB III PERANCANGAN DAN PEMBAHASAN
Bab ini memuat analisa dan perancangan “PROTOTYPE PEMILAH SAMPAH ORGANIK DAN NON ORGANIK PADA KELURAHAN PORIS PLAWAD UTARA”.yang dijelaskan secara terperinci..
BAB IV RANCANGAN SISTEM YANG DIUSULKAN
Dalam bab ini membahas tentang sistem yang akan diusulkan seperti usulan prosedur sistem berjalan, flowchart sistem yang diusulkan, rancangan prototipe, konfigurasi sistem, pengujian, evaluasi, implementasi, dan estimasi biaya.
Bab ini berisi tentang kesimpulan dan saran dari hasil karya sebagai upaya untuk perbaikan dan pengembangan kedepannya.
BAB II
TEORI UMUM
Konsep Dasar Prototipe
Definisi Prototipe
Menurut Nurajizah (2015:A-215) [1], “Prototipe didefinisikan suatu versi dari sebuah sistem potensial yang memberikan ide bagi para pengembang dan calon pengguna, bagaimana sistem akan berfungsi dalam bentuk yang telah selesai”.
Menurut Rumini, dkk (2014) [2]"Prototipe adalah suatu versi sistem potensial yang disediakan bagi pengembang dan calon pengguna yang dapat memberikan gambaran bagaimana kira-kira sistem tersebut akan berfungsi bila disusun dalam bentuk yang lengkap”.
Dari beberapa pendapat diatas dapat disimpulkan bahwa prototipe adalah contoh dari suatu sitem yang memberikan ide bagi para user atau calon pengguna dalam bentuk sebenarnya yang dapat dirubah sebelum direalisasikan.
Jenis-Jenis Prototipe
Menurut Yuniarti (2014) [3] Jenis-jenis Prototipe secara general dibagi menjadi dua, yaitu :
- Prototipe Evolusioner (Prototype Evolusionary)
Terus-menerus disempurnakan sampai memiliki seluruh fungsionalitas yang dibutuhkan pengguna dari sistem yang baru. Prototipe ini kemudian dilanjutkan produksi. Jadi satu prototipe evolutioner akan menjadi sistem aktual.
- Prototipe Persyaratan (Requirement Prototype)
Dikembangkan sebagai satu cara untuk mendefinisikan persyaratan-persyaratan fungsional dari sistem baru ketika pengguna tidak mampu mengungkapkan apa yang mereka inginkan. Dengan meninjau prototipe persyaratan seiring dengan ditambahkannya fitur-fitur, pengguna akan mampu mendefinisikan pemrosesan yang dibutuhkan dari sistem yang baru. Ketika persyaratan ditentukan, prototipe persyaratan telah mencapai tujuannya dan proyek lain akan dimulai untuk pengembangan sistem baru. Oleh karena itu, suatu prototipe tidak selalu menjadi sistem aktual. Langkah-langkah pembuatan Prototype Evolutionary ada empat langkah, yaitu:
-
Mengidentifikasi kebutuhan pengguna. Pengembang mewawancarai pengguna untuk mendapatkan ide mengenai apa yang diminta dari sistem.
-
Membuat satu prototipe. Pengembang mempergunakan satu alat prototyping atau lebih untuk membuat prototipe. Contoh dari alat-alat prototyping adalah generator aplikasi terintegrasi dan toolkit prototyping. Generator aplikasi terintegrasi (integrated application generator) adalah sistem peranti lunak siap pakai yang mampu membuat seluruh fitur yang diinginkan dari sistem baru—menu, laporan, tampilan, basis data, dan seterusnya. Toolkit prototyping meliputi sistem-sistem peranti lunak terpisah, seperti spreadsheet elektronik atau sistem manajemen basis data, yang masing-masing mampu membuat sebagian dari fitur-fitur sistem yang diinginkan.
-
Menentukan apakah prototipe dapat diterima, pengembang mendemonstrasikan prototipe kepada para pengguna untuk mengetahui apakah telah memberikan hasil yang memuaskan, jika sudah, langkah emapat akan diambil; jika tidak, prototipe direvisi dengan mengulang kembali langkah satu, dua, dan tiga dengan pemahaman yang lebih baik mengenai kebutuhan pengguna.
-
Menggunakan prototipe, prototipe menjadi sistem produksi.

-
Konsep Dasar Sampah
Definisi Sampah
Menurut Widawati, dkk (2014:119-126) [4] “Sampah merupakan produk samping dari aktifitas masyarakat dari hasil sisa produk atau sesuatu yang dihasilkan dari sisa-sisa penggunaan yang manfaatnya lebih kecil dari pada produk yang digunakan oleh penggunanya sehingga hasil dari sisa ini dibuang atau tidak digunakaan lagi”.
Menurut Gandes, dkk (2013:2) [5] “Sampah adalah sisa kegiatan sehari-hari manusia atau proses alam berbentuk padat”.
Dari beberapa pendapat diatas dapat disimpulkan bahwa sampah adalah material dari sisa kegiatan manusia yang dibuang atau tidak digunakan lagi.
Jenis-Jenis Sampah
Menurut Sentosa dan Soemarno (2014:1) [6] Pada umumnya, jenis sampah terdiri atas 2 bagian yaitu:
- Sampah Organik
Sampah organik atau atau sering disebut sampah basah adalah jenis sampah yang berasal dari jasad hidup sehingga mudah membusuk dan dan dapat hancur secara alami.
- Sampah Anorganik
Sampah anorganik atau sampah yang tidak membusuk adalah sampah yang tersusunn dari senyawa anorganik, berasal dari sumber daya alamtidak terbaharui seperti mineral, dan minyak bumi, ataru terdiri dari proses industri.
Konsep Dasar Perancangan Sistem
Definisi Perancangan Sistem
Menurut Rianti, dkk (2016:52) [7] “Perancangan sistem adalah merancang atau mendesain suatu sistem yang baik, yang isinya adalah langkah-langkah operasi dalam proses pengolahan data dan prosedur untuk mendukung sistem operasi sistem”.
Menurut Ekawati, dkk (2015:58) [8] “Perancangan sistem adalah suatu desain rancangan sistem yang dibuat untuk menggambarkan alur jalannya suatu sistem”.
Berdasarkan definisi diatas dapat disimpulkan bahwa perancangan sistem adalahsuatu desain rancangan sistem yang dibuat untuk menggambarkan alur jalannya suatu sistem yang baik yang didalamnya terdapat langkah-langkah operasi dalam proses pengolahan data dan prosedur untuk mendukung sistem operasi sistem.
Tujuan Perancangan Sistem
Menurut Yuanita, dkk (2017:281). Tahap Perancangan/Desain Sistem mempunyai 2 tujuan utama, yaitu :
-
Memenuhi kebutuhan pemakai sistem.
-
Memberikan gambaran yang jelas dan rancang bangun yang lengkap untuk program dan ahli – ahli teknik terlibat.
Teori Khusus
Konsep Dasar Mikrokontroler
Definisi Mikrokontroler
Menurut Prayudha, dkk (2014:174) [9] “Mikrokontroler adalah sebuah chip yang didalamnya terdapat mikroprosesor yang telah di kombinasikan I/O dan memori RAM/ROM.”
Menurut Prastyawan, dkk (2014) [10] “Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data”.
Menurut Timotus, dkk(2014:125) “Mikrokontroler adalah sebuah system mikroprosesor dimana didalamnya sebuah tedapat CPU, ROM, I/O, clock, dan peralatan internal lainnya yang sudah saling terhubung dan ter-organisasi dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai”.
Dari beberapa definisi diatas dapat disimpulkan bahwa mikrokontroler adalah sebuah sistem fungsional dalam sebuah chip yang mempunyai prosessor, memori dan perlengkapan input dan output yang menjadi kendali dari sebuah program yang ditulis.
Karakteristik Mikrokontroler
Menurut Saefullah, dkk (2013:2) [11] mikrokontroler memiliki karakteristik sebagai berikut :
-
Memiliki program khusus yang disimpan dalam memori untuk aplikasi tertentu, tidak seperti PC yang multifungsi karena mudahnya memasukkan program. Program mikrokontroler relatif lebih kecil daripada program-program pada PC.
-
Konsumsi daya kecil.
-
Rangkaiannya sederhana dan kompak.
-
Harganya murah, karena komponennya sedikit.
-
Unit I/O yang sederhana, misalnya LCD, LED, Latch.
-
Lebih tahan terhadap kondisi lingkungan ekstrim, misalnya temperature tekanan, kelembaban, dan sebagainya.
Jenis-Jenis Mikrokontroler
Secara teknis, hanya ada 2 macam mikrokontroler. Pembagian ini didasarkan pada kompleksitas instruksi-instruksi yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu yaitu RISC dan CISC.
-
RISC merupakan kependekan dari Reduced Instruction Set Computer. Instruksi yang dimiliki terbatas, tetapi memiliki fasilitas yang lebih banyak. Contoh RISC yaitu Mikrokontroler AVR, PIC (Peripheral Interface Controller), Mikrokontroler ARM.
-
CISC kependekan dari Complex Instruction Set Computer. Instruksi bisa dikatakan lebih lengkap tapi dengan fasilitas secukupnya. Contoh CISC yaitu Mikrokontroler MCS-51.
Konsep Dasar Arduino Uno
Definisi Arduino Uno
Menurut Yenni, dkk (2016-2) [12] “Arduino adalah platform dari physical computing yang bersifat open source. Pengertian physical computing adalah suatu sistem atau perangkat fisik yang dibangun dengan menggunakan perangkat keras dan perangkat lunak, yang bersifat interaktif, yaitu dapat menerima rangsangan dari lingkungan dan memberikan respon balik.
Menurut Silvia, dkk (2014 :1-10) [13] “Arduino adalah sebuah rangkaian yang di kembangkan dari mikrokontroler berbasis Atmega328. Arduino memiliki 14 kaki digital input/output, dimana 6 kaki digital diantaranya dapat digunakan sebagai sinyal PWM (Pluse Wildth Modulation) sinyal PWM berfungsi untuk mengatur kecepatan peputaran motor.
Arduino Uno berbeda dari semua board Arduino sebelumnya, Arduino Uno tidak menggunakan chip driver FTDI USB-to-serial. Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) diprogram sebagai sebuah pengubah USB ke serial. Revisi 2 dari board Arduino Uno mempunyai sebuah resistor yang menarik garis 8U2 HWB ke ground, yang membuatnya lebih mudah untuk diletakkan ke dalam DFU mode. Revisi 3 dari board Arduino UNO memiliki fitur-fitur baru sebagai berikut:
-
Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke depannya, shield akan dijadikan kompatibel/cocok dengan board yang menggunakan AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung, yang disediakan untuk tujuan kedepannya.
-
RESET sirkuit yang lebih kuat.
-
Atmega 16U2 menggantikan 8U2

Spesifikasi Arduino Uno
Berikut adalah spesifikasi dari mikrokontroler Arduino Uno (ATmega328) :
-
Mikrokontroler ATmega328.
-
Catu Daya 5V.
-
Tegangan Input rekomendasi 712 V.
-
Tegangan Input batasan 620 V.
-
Pin I/O Digital berjumlah 14.
-
Pin input analog berjumlah 6.
-
Arus DC per Pin I/O 40 mA.
-
Arus DC per Pin I/O untuk pin 3.3 V 50 mA
-
Flash memori 32 KB ( Atmega 328 ), dimana 0.5 digunakan oleh bootloader.
-
SRAM 2 KB.
-
EEPROM 1 KB.
-
Clock Speed 16 MHz.

Konsep Dasar Motor Servo
Definisi Motor Servo
Menurut Sausan, dkk (2016:35-42) [14] “Motor Servo adalah sebuah perangkat atau aktuator putar (motor) yang mampu bekerja dua arah (Clockwise dan CounterClockwise) dan dilengkapi rangkaian kendali dengan sistem umpan balik loop tertutup yang terintergrasi pada motor tersebut”.
Prinsip Kerja Motor Servo
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (PulseWideModulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰.
Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untukmenginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.

Konsep Dasar Sensor Warna TCS3200
Definisi Sensor Warna TCS3200
Menurut Mandari, dkk (2016:2) [15] “Sensor Warna TCS3200 menggunakan chip TAOS TCS3200 RGB. Modul ini telah terintegrasi dengan 4 LED. Sensor warna TCS3200 dapat mendeteksi dan mengukur intensitas warna tampak. Beberapa aplikasi yang menggunakan sensor ini di antaranya : pembacaan warna, pengelompokan barang berdasarkan warna, ambient light sensing and caliboration, pencocokan warna, dan banyak aplikasi lainnya. Chip TCS3200 memiliki beberapa photodetector, dengan masing – masing filter warna yaitu: merah, hijau, biru, dan clear. Filter-filter tersebut didistribusikan pada masing-masing array. Module ini memiliki oscilator yang menghasilkan frekuensinya sama dengan warna yang dideteksi.

Konsep Dasar Sensor Metal
Definisi Sensor Metal
Menurut Pratiwi, dkk (2017:6) [16] “Metal Detector adalah sebuah alat yang dapat digunakan untuk mendeteksi keberadaan logam yang ada di atas atau di bawah permukaan tanah dalam gerak tertentu. Logam yang dapat di deteksi dalam rangkaian detektor logam ini adalah benda logam yang mengandung unsur besi atau dapat mempengaruhi medan magnet.

Prinsip Kerja Metal Detector
Gelombang electromagnet yang membentuk medan electromagnet pada satu atau beberapa koil. Ada beberapa buah koil yang dimanfaatkan sebagai pemancar gelombang dan penerima gelombang, dimana pada kondisi standart, gelombang yang diterima mempunyai standart tertentu dan ini yang biasa disebut “balance” pada metal detector. Deskripsi tersebut bisa digambarkan seperti dibawah.

Jika benda logam melewati metal detector, maka gelombang yang ada menjadi terganggu dan standart wave analyzer akan memberitahukan bahwa ada ketidak seimbangan gelombang. Metal detector memberitahu kita bahwa ada sebuah benda bersifat logam yang lewat.
Untuk logam yang mempunyai sifat magnetic metal, medan electromagnet yang diterima receiver akan bertambah. Sedangkan logam yang bersifat non magnetic metal, maka medan electromagnet yang diterima receiver akan berkurang. Yang gampang dan susah dideteksi metal detector. Ada 3 hal yang penting untuk menjadi acuan pengguna metal detector agar kita tidak salah menilai atau menggunakan sebuah metal detector : Jenis metal kontaminan berdasar sifat intrinsic resistance metal. Semakin besar intrinsic resistance dari metal maka semakin sulit terdeteksi. Karena itu standart acuan metal kontaminasi sebuah metal detector harus ada minimal 2 jenis, yaitu metal yang intrinsic resistance-nya paling kecil seperti Ferrous(Fe/Besi) dan metal yang intrinsic resistance-nya paling besar seperti Stainless steel (SS) dan jenis SS yang biasa digunakan adalah SS304 atau SS316.Ukuran sample kontaminasi metal tersebut pastinya untuk Fe akan lebih kecil dibandingkan dengan SS. Bagaimana dengan jenis metal yang lain? Bagaimana dengan tembaga atau aluminium atau kuningan dll? Untuk metal yang lain, ukuran sample kontaminan tidak akan lebih besar daripada SS.
Bentuk kontaminasi metal. Standart sample kontaminan metal pada metal detector adalah berbentuk bola dengan diameter tertentu. Untuk kontaminan berbentuk wire atau disc (lempengan) hal itu tergantung dari orientasi saat kontaminan tersebut memasuki metal detector.
Konsep Dasar Buzzer
Definisi Buzzer
Menurut Mulyono (2013:2) [17] “Buzzer merupakan komponen yang berfungsi untuk mengelurkan suara, prinsip kerjanya pada dasarnya hampir sama dengan loudspeaker, jadi buzzer juga terdiri atas kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut di aliri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik kedalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).

Konsep Dasar LED (Light Emitting Dioda
Definisi LED (Light Emitting Dioda
Menurut Suhardi (2014 : 116-122) [18], “LED adalah semikonduktor yang dapat mengubah energi listrik lebih banyak menjadi cahaya, merupakan perangkat keras dan padat (solid-state component) sehingga lebih unggul dalam ketahanan (durability). Selama ini LED banyak digunakan pada perangkat elektronik karena ukuran yang sangat kecil, cara pemasangan praktis, serta konsumsi listrik rendah. Salah satu kelebihan LED adalah usia relativ panjang. Kelemahannya pada harga per lumen (satuan cahaya) lebih mahal dibandingkan dengan lampu jenis pijar, mudah rusak jika dioperasikan pada suhulingkungan yang terlalu tinggi, misal di industri.
Simbol Dan Bentuk Fisik LED

Dari gambar diatas dapat kita ketahui bahwa LED memiliki kaki 2 buah seperti dengan dioda yaitu kaki anoda dan kaki katoda. Pada gambar diatas kaki anoda memiliki ciri fisik lebih panjang dari kaki katoda pada saat masih baru, kemudian kaki katoda pada LED (Light Emitting Dioda) ditandai dengan bagian body LED yang di papas rata. Kaki anoda dan kaki katoda pada LED (Light Emitting Dioda) disimbolkan seperti pada gambar diatas. Pemasangan LED (Light Emitting Dioda) agar dapat menyala adalah dengan memberikan tegangan bias maju yaitu dengan memberikan tegangan positif ke kaki anoda dan tegangan negatif ke kaki katoda.
Konsep Dasar LCD (Liquid Crystal Display
Definisi LCD (Liquid Crystal Display)
MenurutGitha, dkk (2014:1) [19] “LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang mengubah kristal cair sebagai penampil utama. LCD dapat memunculkan tulisan karena terdapat banyak pixel yang terdiri dari satu buah kristal cair sebagai titik cahaya.
Walau disebut sebagai titik cahaya, namun kristal cair memancarkan cahaya sendiri. Sumber cahaya didalam sebuah perangkat LCD adalah sebuah lampu nenon di bagian belakang susunan kristal cair tersebut. Titik cahaya inilah yang membentuk tampilan citra. Kutub kristal cair yang dilewati arus listrik akan berubah karena pengaruh polarisasi medan magnet yang timbul. Oleh karena itu, hanya beberapa saja yang diteruskan serdangkan warna lainnya tersaring.
Dalam hal ini digunakan LCD 2x16. Karena LCD 2x16 ini biasa digunakan sebagai penampil karakter atau data pada sebuah rangkaian digital atau mikrokontroler.

Konsep Dasar Sensor Ultrasonik
Definisi Sensor Ultrasonik
Menurut Prayudha, dkk (2014:3) [9] “Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya kembali denga perbedaan waktu sebagai dasar pengindraannya”.
Menurut Githa,dkk (2014:1) [19] “Sensor Ultrasonik adalah sensor pengukur jarak atau objek. Ultrasonik sering digunakan untuk keperluan mengukur jarak sebuah benda atau mendeteksi halangan”.
Sensor ultrasonik terdiri dari sebuah chip pembangkit sinyal 40 KHz, sebuah speaker ultrasonik, dan sebuah microphone ultrasonik. Speakerultrasonik mengubah sinyal 40 KHz menjadi suara sementara microphone ultrasonik berfungsi untuk mendeteksi pantulan suaranya. Sensor ultrasonik akan mengirimkan suara ultrasonik ketika ada pulsa trigger dari mikrokontroler. Suara ultrasonik dengan frekuensi sebesar 40 KHz akan dipancarkan selama 200 μs. Suara ini akan merambat di udara dengan kecepatan 340 m/s atau 29.412 μs setiap 1 cm, mengenai objek dan akan terpantul kembali ke sensor ultrasonik. Selama menunggu pantulan, sensor ultrasonik akan menghasilkan sebuah pulsa. Pulsa ini akan berlogik low ketika suara pantulan terdeteksi oleh sensor ultrasonik. Maka dari itu, lebar pulsa dapat merepresentasikan jarak antara sensor ultrasonik dengan objek. Selanjutnya mikrokontroler cukup mengukur lebar pulsa tersebut dan melakukan konversi lebar pulsa ke jarak dengan perhitungan sebagai berikut :
Jarak = (lebar pulsa /29.412 ) / 2 ( dalam cm) ...... (1)
Sensor ultrasonik buatan parallax (Sensor PING) dapat digunakan untuk mengukur jarak sejauh 2 cm sampai 300 cm.
Sumber

Karakteristik Sensor Ultrasonik
Menurut Heri Andrianto dan Aan Darmawan (2016:100) [20], Sensor ultrasonik memiliki karakteristik sebagai berikut:
-
Tegangan supply : 5 VDC
-
Konsumsi arus : 30 mA (maksimum 35 mA)
-
Jarak : 2 cm sampai dengan 300 cm
-
Input Trigger : pulsa TTL positif, minimal 2 μS, 5 μS typical
-
Echo pulse : pulsa TTL positif, 115 μS sampai dengan 18.5 ms
-
Echo Hold-off : 750 μS
-
Frekuensi Burst : 40 kHz untuk 200 μS
-
Delay untuk pengukuran selanjutnya : minimal 200 μS

Cara Kerja Sensor PING
-
Sensor Ping mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik ( 40 kHz ) selama tBURST ( 200 μs ) kemudian mendeteksi pantulannya.
-
Sensor Ping memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroler pengendali ( pulsa trigger dengan tOUT min. 2 μs ). Gelombang ultrasonik ini melalui udara dengan kecepatan 340 meter per detik, mengenai objek dan memantul kembali ke sensor.
-
Ping mengeluarkan pulsa output high pada pin SIG setelah memancarkan gelombang ultrasonik dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG.
-
Lebar pulsa High ( tIN ) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan objek. Sehingga jarak dapat ditentukan menggunakan rumus berikut ini :
Jarak = ( tIN (s) ÷ 2) x 340 m/s = ( tIN (s) / 2 ÷ 29.412 µS / cm) ..... (2) Dimana :
S = Jarak antara sensor ultrasonik dengan objek yang dideteksi
tIN = Selisih waktu pemancaran dan penerimaan pantulan gelombang

Konsep Dasar Flowchart
Definisi Flowchart
Menurut Lestari, dkk (2016:44) [21] “Flowchart adalah diagram yang menyatakan aliran proses dengan menggunakan anotasi bidang – bidang geometri, seperti lingkaran, persegi empat, wajik, oval dan sebagainya untuk mempersentasikan langkah – langkah kegiatan beserta urutannya dengan menghubungkan masing – masing langka tersebut menggunakan tanda panah”.
Menurut Rejeki (2013:451) [22] “Flowchart merupakan penyajian yang sistematis tentang proses dan logika dari kegiatan penanganan informasi atau penggambaran secara grafik dari langkah-langkah dan urutan-urutan prosedur dari suatu program”
Dari beberapa definisi di atas maka dapat disimpulkan bahwa flowchart adalah diagram yang mempersentasikan langkah-langkah beserta urutan-urutan prosedur dari suatu program yang dihubungkan menggunakan tanda panah.
Jenis-Jenis Flowchart
Menurut Tri (2015:2), “Flowchart terbagi atas lima jenis, yaitu:
- Flowchart Sistem (System Flowchart)
Flowchart sistem merupakan bagan yang menunjukkan alur kerja atau apa yang sedang dikerjakan di dalam sistem secara keseluruhan danmenjelaskan urutan dari prosedur-prosedur yang ada di dalam sistem. Dengan kata lain, flowchart ini merupakan deskripsi secara grafik dari urutan prosedur-prosedur yang terkombinasi yang membentuk suatu sistem. Flowchart Sistem terdiri dari data yang mengalir melalui sistem dan proses yang mentransformasikan data itu.

- Flowchart Dokumen (Document Flowchart)
Flowchart dokumen kegunaan utamanya adalah untuk menelusuri alur form dan laporan sistem dari satu bagian ke bagian lain baik bagaimana alur form danlaporan diproses, dicatat dan disimpan.

- Flowchart Skematik (Schematic Flowchart)
Flowchart skematik mirip dengan flowchart sistem yang menggambarkan suatu sistem atau prosedur. Flowchart Skematik ini bukan hanya menggunakan simbol-simbol flowchart standar, tetapi juga menggunakan gambar-gambar komputer, peripheral, form-form atau peralatan lain yang digunakan dalam sistem. Flowchart Skematik digunakan sebagai alat komunikasi antara analis sistem dengan seseorang yang tidak familiar dengan simbol-simbol flowchart yang konvensional. Pemakaian gambar sebagai ganti dari simbol-simbol flowchart akan menghemat waktu yang dibutuhkan oleh seseorang untuk mempelajari simbol abstrak sebelum dapat mengerti flowchart. Gambar-gambar ini mengurangi kemungkinan salah pengertian tentang sistem, hal ini disebabkan oleh ketidak-mengertian tentang simbol-simbol yang digunakan. Gambar-gambar juga memudahkan pengamat untuk mengerti segala sesuatu yang dimaksudkan oleh analis, sehingga hasilnya lebih menyenangkan dan tanpa ada salah pengertian.

- Flowchart Program (Program Flowchart)
Flowchart program dihasilkan dari flowchart sistem. Flowchart Program merupakan keterangan yang lebih rinci tentangbagaimana setiap langkah program atau prosedur sesungguhnya dilaksanakan. Flowchart ini menunjukkan setiap langkah program atauprosedur dalam urutan yang tepat saat terjadi. Programmer menggunakan flowchart program untuk menggambarkan urutan instruksi dari program komputer. Analis Sistem menggunakan flowchart program untuk menggambarkan urutan tugas-tugas pekerjaan dalam suatu prosedur atau operasi.

- Flowchart Proses (Prosses Flowchart)
Flowchart proses merupakan teknik penggambaran rekayasa industrial yang memecah dan menganalisis langkah-langkah selanjutnya dalam suatu prosedur atau sistem. Flowchart proses memiliki lima simbol khusus, yaitu:

Flowchart Proses digunakan oleh perekayasa industrial dalam mempelajari dan mengembangkan proses-proses manufacturing. Dalam analisis sistem, flowchart ini digunakan secara efektif untuk menelusuri alur suatu laporan atau form. Berikut adalah contoh gambar dari flowchart proses:

Konsep Dasar Pengujian
Definisi Black Box
Menurut Desmira (2015:40) [8] “Black Box Testing yaitu menuji perangkat lunak dari segi fungsional tanpa menguji desain dan kode program”.
Menurut Silvia (2015:48) [23] “Pengujian Black Box merupakan metode perancangan data uji yang didasarkan pada spesifikasi perangkat lunak dan fungsinya”.
Dari definisi di atas dapat disimpulkan bahwa metode pengujian BlackBox dilakukan hanya untuk mengamati hasil eksekusi melalui data uji dan memeriksa fungsional dari perangkat lunak.
Black Box Testing tidak membutuhkan pengetahuan mengenai, alur internal (internal path), struktur atau implementasi dari software undertest (SUT). Karena itu uji coba BlackBox memungkinkan pengembang software untuk membuat himpunan kondisi input yang akan melatih seluruh syarat-syarat fungsional suatu program.
Uji coba BlackBox berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya:
-
Fungsi-fungsi yang salah atau hilang
-
Kesalahan interface
-
Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas.
-
Kesalahan dalam struktur data atau akses database eksternal
-
Kesalahan performa
-
Kesalahan inisialisasi dan terminasi
Uji coba BlackBox diaplikasikan dibeberapa tahapan berikutnya. Karena uji coba BlackBox dengan sengaja mengabaikan struktur kontrol, sehingga perhatiannya difokuskan pada informasi domain. Uji coba didesain untuk dapat menjawab pertanyaan pertanyaan berikut:
-
Bagaimana validitas fungsionalnya diuji?
-
Jenis input seperti apa yang akan menghasilkan kasus uji yang baik?
-
Apakah sistem secara khusus sensitif terhadap nilai input tertentu?
-
Bagaimana batasan-batasan kelas data diisolasi?
-
Berapa rasio data dan jumlah data yang dapat ditoleransi oleh sistem?
-
Apa akibat yang akan timbul dari kombinasi spesifik data pada operasi sistem?
Sehingga dalam uji coba BlackBox harus melewati beberapa proses sebagai berikut:
-
Menganalisis kebutuhan dan spesifikasi dari perangkat lunak.
-
Pemilihan jenis input yang memungkinkan menghasilkan output benar serta jenis input yang memungkinkan output salah pada perangkat lunak yang sedang diuji.
-
Menentukan output untuk suatu jenis input.
-
Pengujian dilakukan dengan input-input yang telah benar-benar diseleksi.
-
Melakukan pengujian.
-
Pembandingan output yang dihasilkan dengan output yang diharapkan.
-
Menentukan fungsionalitas yang seharusnya ada pada perangkat lunak yang sedang diuji.
Metode Pengujian Dalam Black Box
Ada beberapa macam metode pengujian Black Box, berikut diantaranya:
- EquivalencePartioning
Equivalence Partioning merupakan metode uji coba BlackBox yang membagi domain input dari program menjadi beberapa kelas data dari kasus uji coba yang dihasilkan. Kasus uji penanganan single yang ideal menemukan sejumlah kesalahan (misalnya: kesalahan pemrosesan dari seluruh data karakter) yang merupakan syarat lain dari suatu kasus yang dieksekusi sebelum kesalahan umum diamati.
- Boundary Value Analysis
Sejumlah besar kesalahan cenderung terjadi dalam batasan domain input dari pada nilai tengah. Untuk alasan ini boundary valuean alysis (BVA) dibuat sebagai teknik uji coba. BVA mengarahkan pada pemilihan kasus uji yang melatih nilai-nilai batas. BVA merupakan desain teknik kasus uji yang melengkapi Equivalencepartitioning. Dari pada memfokuskan hanya pada kondisi input, BVA juga menghasilkan kasus uji dari domain output.
- Cause-Effect Graphing Techniques
Cause-EffectGraphing merupakan desain teknik kasus uji coba yang menyediakan representasi singkat mengenai kondisi logikal dan aksi yang berhubungan. Tekniknya mengikuti 4 tahapan berikut:
-
Causes (kondisi input), dan Effects (aksi) didaftarkan untuk modul dan identifier yang dtujukan untuk masing-masing.
-
Pembuatan grafik Causes-Effect graph.
-
Grafik dikonversikan kedalam tabel keputusan
-
Aturan tabel keputusan dikonversikan kedalam kasus uji
-
- Comparison Testing
Dalam beberapa situasi (seperti: aircraft avionic, nuclear Power plant control) dimana keandalan suatu software amat kritis, beberapa aplikasi sering menggunakan software dan hardware ganda (redundant). Ketika softwareredundant dibuat,tim pengembangan software lainnya membangun versi independent dari aplikasi dengan menggunakan spesifikasi yang sama. Setiap versi dapat diuji dengan data uji yang sama untuk memastikan seluruhnya menyediakan output yang sama. Kemudian seluruh versi dieksekusi secara parallel dengan perbandingan hasil real-time untuk memastikan konsistensi. Dianjurkan bahwa versi independent suatu software untuk aplikasi yang amat kritis harus dibuat, walaupun nantinya hanya satu versi saja yang akan digunakan dalam sistem. Versi independent ini merupakan basis dari teknik BlackBoxTesting yang disebut ComparisonTesting atau back-to-backTesting.
-
Sample and RobustnessTesting
- Sample Testing
Melibatkan beberapa nilai yang terpilih dari sebuah kelas ekivalen, seperti Mengintegrasikan nilai pada kasus uji. Nilai-nilai yang terpilih mungkin dipilih dengan urutan tertentu atau interval tertentu
- Robustness Testing
Pengujian ketahanan (RobustnessTesting) adalah metodologi jaminan mutu difokuskan pada pengujian ketahanan perangkat lunak. Pengujian ketahanan juga digunakan untuk menggambarkan proses verifikasi kekokohan (yaitu kebenaran) kasus uji dalam proses pengujian.
- Sample Testing
-
BehaviorTesting dan PerformanceTesting
- BehaviorTesting
Hasil uji tidak dapat dievaluasi jika hanya melakukan pengujian sekali, tapi dapat dievaluasi jika pengujian dilakukan beberapa kali, misalnya pada pengujian struktur data stack.
- Performance Testing
Digunakan untuk mengevaluasi kemampuan program untuk beroperasi dengan benar dipandang dari sisi acuan kebutuhan. Misalnya: aliran data, ukuran pemakaian memori, kecepatan eksekusi, dll. Selain itu juga digunakan untuk mencari tahu beban kerja atau kondisi konfigurasi program. Spesifikasi mengenai performansi didefinisikan pada saat tahap spesifikasi atau desain. Dapat digunakan untuk menguji batasan lingkungan program.
- BehaviorTesting
- Requirement Testing
Spesifikasi kebutuhan yang terasosiasi dengan perangkat lunak (input/output/fungsi/performansi) diidentifikasi pada tahap spesifikasi kebutuhan dan desain.
-
RequirementTesting melibatkan pembuatan kasus uji untuk setiap spesifikasi kebutuhan yang terkait dengan program
-
Untuk memfasilitasinya, setiap spesifikasi kebutuhan bisa ditelusuri dengan kasus uji dengan menggunakan traceability matrix.
-
- Endurance Testing
Endurance Testing melibatkan kasus uji yang diulang-ulang dengan jumlah tertentu dengan tujuan untuk mengevaluasi program apakah sesuai dengan spesifikasi kebutuhan.
Contoh: Untuk menguji keakuratan operasi matematika (floating point, rounding off, dll), untuk menguji manajemen sumber daya sistem (resources) (pembebasan sumber daya yang tidak benar, dll), input/outputs (jika menggunakan framework untuk memvalidasi bagian input dan output). Spesifikasi kebutuhan pengujian didefinisikan pada tahap spesifikasi kebutuhan atau desain.
Kelebihan dan Kelemahan Black Box
Dalam uji coba BlackBox terdapat beberapa kelebihan dan kelemahan. Berikut adalah keunggulan dan kelemahannya:

Definisi White Box
Menurut Desmira, dkk (2015:40) [8] “White Box Testing yaitu pengujian perangkat lunak dari segi desain dank ode program apakah mampu menghasilkan fungsi-fungsi, masukan, dan keluaran yang sesuai dengan spesifikasi kebutuhan”.
Menurut Silvia, dkk (2015:48) [23] “White Box adalah pengujian yang didasarkan pada pengecekan terhadap detail perancangan, menggunakan struktur kontrol dari desain program secara procedural untuk membagi pengujian kedalam beberapa kasus pengujian”.
Dari definisi di atas maka dapat disimpulkan bahwa metode pengujian White Box adalah metode pengujian yang di lakukan pada perangkat lunak dari segi desain dank ode program secara prosedural untuk mengetahui apakah sudah berjalan sesuai spesifikasi kebutuhan.
Keuntungan Pengujian White Box
-
Perangkat Efektivitas : silang keputusan desain dan asumsi terhadap kode sumber dapat menguraikan kuat.
-
Desain, tapi pelaksanaannya mungkin tidak sejajar dengan maksud desain.
-
Kode penuh Phatway Mampu : semua jalur kode yang mungkin dapat diuji termasuk penanganan error, dependensi, dan tambahan kode logika/ aliran intern.
-
Awal Cacat Identifikasi : Menganalisis kode sumber dan mengembangkan tes berdasarkan rincian pelaksanaan memungkinkan.
-
Penguji untuk menemukan kesalahan pemrograman dengan cepat.
-
Mengungkapkan Kode Tersembunyi Cacat : akses modul program.
-
Tidak ada Waiting : Pengujian dapat dimulai pada tahap awal. Satu tidak perlu menunggu GUI akan tersedia.
Konsep Dasar Elisitasi
Definisi Elisitasi
Menurut Amrullah, dkk (2016:14-27) [24] “Elisitasi merupakan rancangan yang dibuat berdasarkan system yang baru yang diingikan oleh pihak manajemen terkait dan di sanggupi oleh penulis untuk di eksekusi”.
Menurut Prastomo (2014:166) [25], “Elisitasi adalah suatu metode untuk analisa kebutuhan dala rekayasa perangkat lunak”. Elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu :
- Tahap I
Berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara.
- Tahap II
Hasil pengklasifikasian elisitasi tahap I berdasarkan metode MDI. Metode MDI bertujuan memisahkan antara rancangan sistem yang penting dan harus ada sistem baru dengan rancangan yang disanggupi oleh penulis untuk di eksekusi. M pada MDI berarti mandatory (penting). Maksudnya, requirement tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru. D pada MDI berarti desirable, maksudnya requirement tersebut tidak terlalu penting dan boleh dihilangkan. Namun, jika requirement tersebut digunakan dalam pembentukan sistem maka akan membuat sistem tersebut lebih sempurna. I pada MDI berarti inessential, maksudnya requirement tersebut bukanlah bagian sistem yang dibahas, tetapi bagian dari luar sistem.
- Tahap III
Merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali melalui TOE, yaitu:
-
T artinya teknikal, bagaimana tata cara atau teknik pembuatan requirement dalamsistem disusulkan.
-
O artinya operasional, bagaimana tata cara pengguna requirement dalam sistem akan dikembangkan.
-
E artinya ekonomi, berapakah biaya yang diperlukan guna membanguan requirement didalam sistem.
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu:-
High (H) : Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal. Maka requirement tersebut harus di eliminasi.
-
Middle (M) : Mampu dikerjakan.
-
Low (L) : Mudah dikerjakan.
-
-
Konsep Dasar Komponen Elektronika
Definisi Komponen Elektronika
Menurut Andrianto (2016:5), “Rangkaian elektronik adalah rangkaian listrik yang memakai komponen-komponen elektronik. Komponen elektronik dibagi menjadi dua jenis yaitu komponen pasif dan komponen aktif. Komponen pasif, yaitu komponen yang tidak dapat menguatkan dan menyearahkan sinyal listrik serta tidak dapat mengubah suatu energy kebentuk lainnya. Contoh komponen pasif yaitu : resistor, kapasitor, dan inductor. Komponen elektronika pasif dapat dilihat pada tabel 2.3

Komponen aktif adalah komponen yang dapat menguatkan dan menyearahkan sinyal listrik, serta mengubah energi dari satu bentuk ke bentuk lainnya. Contoh komponen aktif : Dioda, LED, Dioda Zener, Transistor dan Operational Amplifier. Komponen aktif dapat dilihat pada tabel 2.4.


Konsep Dasar Literature Review
Definisi Literature Review
Menurut Dewi, dkk (2014:125) Metode literature review dilakukan untuk menunjang metode wawancara dan observasi yang telah dilakukan. Pengumpulan informasi yang dibutuhkan dalam mencari referensi-referensi yang berhubungan dengan penelitian yang dilakukan. Manfaat dari literature review ini antara lain :
-
Mengidentifikasikan kesenjangan (identify gaps) dari penelitian ini.
-
Menghindari membuat ulang (reinventing the wheel) sehingga banyak menghemat waktu dan juga menghindari kesalahan-kesalahan yang pernah dilakukan oleh orang lain.
-
Mengidentifikasikan metode yang pernah dilakukan dan yang relevan terhadap penelitian ini.
-
Meneruskan apa yang penelitian sebelumnya telah dicapai sehingga dengan adanya studi pustaka ini, penelitian yang akan dilakukan dapat membangun di atas landasan (platform) dari pengetahuan atau ide yang sudah ada.
Adapun Literature Review sebagai landasan dalam mendukung penelitian adalah sebagai berikut:
-
Penelitian yang dilakukan oleh Hidayat Verdy, Pada Tahun 2014, Dari Universitas Andalas, yang berjudul “PEMBUATAN TEMPAT SAMPAH CERDAS DENGAN SENSOR PING SR04 BERBASIS MIKROKONTROLER AT89S52”Penelitian ini membahas tentang sebuah tempat sampah cerdas yang membuka dan menutup secara otomatis, hal ini berguna agar bau serta bakteri tidak dapat menyebar melalui udara, termpat sampah hanya mau terbuka saat ada sampah pada jarak 10 cm, Rangkaian pintu tempat sampah ini menggunakan dua uah sensor yaitu sensor PING yang bekerja pada saat sensor tersebut mendeteksi sampah pada jarak 10 cm, pintu tempat sampah ini bekerja apabila ada inputan berupa sampah terdapat diatas penutup tempat sampah, sampah tersebut akan di tangkap oleh sensor PING yang terpasang diatas tutup tempat sampah yang kemudian di konversikan menjadi tegangan dan arus, tegangan dan arus itulah yangakan diprosespada mikrokontroler, setelah sampah masuk ke tempat sampah, kemudian tutupnya secara otomatis dengan output tulisan “Terima Kasih Telah Membuang Sampah” pada LCD.
-
Penelitian yang dilakukan oleh Fajar Dwindy Putrawan, Pada Tahun 2011, Dari Universitas Gunadarma, yang berjudu”TEMPAT SAMPAH CERDAS BERBASIS MIKROKONTROLER AT89S51”Penelitian ini membahas tentang sebuah tempat sampah cerdas dengan rangkaian pintu tempat sampah ini menggunakan dua buah sensor yaitu sensor PIR yang bekerja pada saat sensor tersebut mendeteksi gerakan tubuh manusia, pintu tempat sampah ini bekerja apabila ada inputan berupa gerakan apapun dari manusia, gerakan tersebut akan di tangkap oleh sensor PIR yang dipasang pada tempat sampah yang kemudian akan dikonversikan menjadi tegangan dan arus, tegangan dan arus itulah yang akan di proses pada mikrokontroler, selain itu LED inframerah sebagai pemancar dan fototransistor peka cahaya sebagai penerima, fungsi dari komponen ini adalah sebagai indikator untuk mengetahui sampah penuh dan buzzer sebagai penanda peringatan.
-
Penelitian yang dilakukan oleh Nurwuriadi, Lucky Pradita Anggiat, Nabawi, dan Moch. Husien, Pada Tahun 2013, Dari Universitas Negeri Malangyang berjudul “TEMPAT SAMPAH PEMILAH OTOMATIS” Penelitian ini membahas tentang suatu mesin pemilah sampah otomatis dengan menggunakan warna sebagai pembeda objek organik dan anorganik,untuk tenaga penggerak alat ini menggunakan motor listrik,dan menggunakan batrai sebagai tenaganya terdapat hopper pada bagian atas dan memiliki dua pintu pemilah yang masing masing digerakan oleh motor listrik dengan rantai rol sebagai pemindah dayanya. Data objek yang berada di hopper akan dibaca oleh sensor warna kemudian arduino sebagai mengolah data dari sensor warna yang akan diteruskan untuk menggerakan motor listrik dan membuka salah satu pintu, setelah sampah jatuh sesuai klasifikasinya motor akan menutup kembali.
-
Penelitian yang dilakukan Umedi Irawan pada tahun 2015 dari STMIK RAHARJA yang berjudul “PROTOTYPE PEMILAH DAN PERAJANG SAMPAH ORGANIK BERBASIS ARDUINO UNO PADA DINAS KEBERSIHAN DAN PERTAMANAN KAB. TANGERANG”. Penelitian ini membahas tentang mendaur ulang sampah organik menjadi produk kompos yang bernilai guna tinggi, perancangan ini mempunyai beberpa komponen berupa arduino uno, motor dc, sensor infrared, sensor warna tcs3200, motor servo, motor listrik dan komponen kecil lainnya. Alat ini akan bekerja ketika sensor infrared akan membaca objek, maka compayer aktif, kemudian objek yang melewati sensor warna akan mendeteksi apakah objek sampah tersebut sampah organik atau anorganik. Jika objek berwarna merah (sampah non organik) akan dipisahkan ke kotak 2 sebagai tempat sampah non organik. Tetapi jika objek berwarna hijau (sampah organik) akan dimasukan ke dalam kotak 1, selanjutnya mesin perajang aktif untuk proses penghancuran sampah organik.
-
Penelitian yang dilakukan oleh Suriandi Jayakrista Pada Tahun 2005, Dari Universitas Kristen Maranatha,yang berjudul “PEMILAH SAMPAH ANORGANIK PERKANTORAN OTOMATIS BERBASIS MIKROKONTROLER” Penelitian ini membahas tentang alat pemisah sampah anorganik perkantoran otomatis dengan menggunakan mikrokontroler ATMega 16, yang memisahkan 3 jenis sampah yaitu sampah logam, sampah kertas dan sampah plastik. Pemisah sampah berdasarkan sifat kapasitif dan sifat induktif, dengan menggunakan sensor proximity kapasitif Autonoics CR30-15DN dan sensor proximity induktiff Autonics PSN 40-20DN, jenis sampah dapat diketahui.
-
https://docs.google.com/a/raharja.co/document/d/1YS1AA0gpf4_EidLDMcB5a18R8t0l67C6I8otpEAE8tk/edit?usp=sharing"> “Penelitian dilakukan oleh [26]
-
“Penelitian dilakukan oleh D.Balaji, S.Meera, F.Arshya Banu, M.Priya, C.Shiny Sherlin, K.Sathyapriya Pada Tahun 2017, Dari Department of Electronic and Communication Engineering Mahendra College of Engineering. Salem, yang berjudul “SMART TRASH CAN USING INTERNET OF THINGS” Penelitian ini membahas tentang pengendalian sistem pengelolaan limbah kota dengan menggunakan internet. Internet of Things (IoT) adalah konsep yang pada dasarnya menghubungkan perangkat apapun, dan mematikannya beralih ke Proyek ini menghubungkan tempat sampah dengan internet. Ini akan memperbarui internet. isi sampah pada tempat sampah sehingga sampah akan dibersihkan lebih awal pada tahap luapan. Tempat sampah pintar ini memiliki tiga sensor yaitu infra merah yang di gunakan untuk mengetahui tingkat sampah pada tempat sampah ketika level mencapai nilai ambang batas. Kemudian menggunakan Rasberry Pi yang akan mengirim pesan ke aplikasi mobile dan IoT. Selain itu temapt sampah akan memisahkan limbah yang dapat terdegradasi dan tidak terdegradasi. Limbah yang akan dibuang ke tempat sampah jatuh di atas piring. Kemudian Kapasintasi digunakan untuk mendeteksi limbah yang dapat tergradasi dan yang tidak tergradasi. Awalnya tempat sampah untuk yang tidak tergradasi di tempatkan di bawah piring. Jika masyarakat meletakan limbah yang tergradasi, motor akan memutar tempat sampah untuk limbah yang dapat tergradasi di bawah piring, kemudian limbah akan jatuh pada bagian yang benar. Proyek ini akan membantu memperbaiki sistem pengelolaan limbah dan akan membantu mengubah kota menjadi kota yang cerdas dan bersih”.
-
“Penelitian ini di lakukan oleh Adil Bashir, Shoaib Amin Banday, Ab Rouf Khan, Muhammad Shafi Pada Tahun 2013, Dari Deptt. of Electric and Commuication Engineering, National Institute of Technology, Srinagar, J&K India dan Deptt. of Computer Science and Engineering, VIT University, Chennai, India, yang berjudul “CONCEPT, DESIGN AND IMPLEMENTATION OF AUTOMATIC WASTE MANAGEMENT SYSTEM” Penelitian ini membahas tentang pengelolaan limbah secara otomatis. Identifikasi frekuensi radio (RFID) adalah adalah salah satu teknologi yang paling menjanjikan dan diantisipasi dalam beberapa tahun terakhir. Sistem ini menggunakan tag frekuensi radi (RF) dan dukungan web. Karya yang dipaparkan disini tentu saja memberikan pendekatan baru dalam menangani dan membuang limbah pada hari ke hari dengan cara yang efisien dan mudah. Sistem ini terdiri dari empat subsitem utama yaitu Smart Trash System (STS), Local Base Station (LBS), Smart Vehicle System (SVS) dan Smart Monitoring and Controlling Hut (SMCH). Sistem yang diusulkan akan dapat mengotomatisasi proses pemantauan dan pengelolaan limbah padat dari keseluruhan proses pengumpulan. Teknologi yang akan digunakan dalam sistem yang diusulkan cukup baik untuk memastikan praktis dan sempurna untuk pemantuan dan pengelolaan pengumpulan limbah padat untuk lingkungan hijau.
-
“Penelitian ini di lakukan oleh Emmanuel Atta Williams dan John Bentil, Pada Tahun 2016, Dari Department of Electical/Electronics Enginnering, Takoradi Polytechnic, Ghana dan Department of Civil Engineering, Takoradi Polytechnic, Ghana. Yang berjudul “DESIGN AND IMPLEMENTATION OF A MICROCONTROLLER – BASED AUTOMATIC WASTE MANAGEMENT SORTING UNIT FOR A RECYCLING PLANT” Penelitian ini membahas tentang pemilahan secara otomatis untuk memilah bahan limbah organik dan anorganik untuk di daur ulang. Hal ini untuk mengurangi waktu yang dibutuhkan untuk memilah bahan organik dan anorganik secara manual dan menghemat biaya yang terlibat dalam pengolahan limbah. Studi ini selanjutnya menguraikan teknik canggih dalam memilah limbah berdasarkan unit mikrokontroler yang menggunakan sensor gas untuk memisahkan sampah organik dan anorganik. Sistem deteksi gas tergabung dalam conveyer yang melintas didepan sensor gas dan mengirim data ke controller melalui analog ke digital converter. Unit penyortir pengelolaan limbah otomatis berbasis mikrokontroler untuk pabrim daur ulang berhasil dirancang, dibangun dan ini menyediakan sistem yanga efisien untuk memilah limbah ke berbagai komponen”.
-
“Penelitian ini di lakukan oleh Andres Torres-Garcia, Oscar Rodea-Aragon, Omar Longoria-Gandara, Francisco Sanchez-Garcia, Luis Enrique Gonzales-Jamienez, Pada Tahun 2015, Dari Jesuit University of Guadalajar, Department of Electronics, Systems and IT (ITESO), yang berjudul tentang “INTELLEGENT WASTE SEPARATOR”. Penelitian ini membahas tentangsampah telah menjadi masalah di masyarakat dan ekosistem karena cara orang menyingkirkannya. Sebagian besar sampah dikuburkan atau dibakar atau bahkan disimpan di tempat yang bukan miliknya. Sejumlah besar sampah dibuang dan metode yang digunakan untuk menyimpannya menyebabkan pencemaran udara, air, dan tanah. Untungnya, orang bisa mengandalkan metode lain untuk mengurangi jumlah sampah yang dihasilkan. Jawabannya adalah daur ulang dengan menggunakan ulang bahan-bahannya. Saat ini, cara tradisional untuk memisahkan sampah adalah dengan menggunakan wadah yang berbeda untuk setiap jenis sampah yang memisahkan sampah secara manual, yang tidak selalu bekerja. Tujuan makalah ini adalah untuk menyajikan Intelligent Waste Separator (IWS) yang dapat menggantikan cara tradisional dalam menangani limbah; Perangkat yang diusulkan menerima limbah yang masuk dan menempatkannya secara otomatis di berbagai kontainer dengan menggunakan prosesor tertanam multimedia, pemrosesan gambar, dan pembelajaran mesin untuk memilih dan memisahkan sampah”.








-
BAB III
Gambaran Umum Kelurahan Poris Plawad Utara
Sejarah Singkat Kelurahan Poris Plawad Utara


Visi Dan Misi
Visi
Mewujudkan kelurahan yang baik dalam pelayanan menuju terwujudnya masyarakat yang maju dan beradab di Kota Tangerang.
Misi
-
Meningkatkan kuantitas dan kualitas sarana dan prasarana
-
Mewujudkan perencanaan, pengendalian, evaluasi dan data informasi kelurahan
-
Meningkatkan kualitas pelayanan masyarakat
-
Meningkatkan keamanan ketentraman dan ketertiban
Struktur Organisasi

Pembahasan Tugas Berdasarkan Struktur Organisasi
Lurah
Lurah mempunyai tugas pokok memimpin, mengatur dan mengkoordinasikan dan mengendalikan kegiatan-kegiatan tugas kelurahan dalam lingkup urusan pemerintahan, ketentraman dan ketertiban umum, ekonomi dan pembangunan serta kemasyarakatan. Untuk melaksanakan tugas tersebut lurah mempunyai tanggung jawab:
-
Memimpin penyelenggaraan Pemerintah Kelurahan berdasarkan kebijakan yang ditetapkan bersama BPD (Bank Pembangunan Daerah)
-
Mengajukan rancangan Peraturan Kelurahan
-
Menetapkan Peraturan Kelurahan yang telah mendapat persetujuan bersama BPD (Bank Pembangunan Daerah)
-
Menyusun dan mengajukan rancangan Peraturan Kelurahan mengenai APBD (Anggaran Pendapatan Belanja Daerah) untuk dibahas dan ditetapkan bersama BPD (Bank Pembangunan Daerah)
-
Membina kehidupan masyarakat Kelurahan
-
Membina Perekonomian Kelurahan
-
Mengkoordinasikan pembangunan kelurahan secara partisipatif
-
Mewakili kelurahannya di dalam dan di luar pengadilan dan dapat menunjuk kuasa hukum untuk mewakilinya sesuai dengan peraturan perundang-undangan Melaksanakan tugas lain sesuai dengan peraturan perundang-undangan
Sekretariat
Sekretariat dipimpin oleh sekretaris Lurah yang memiliki tugas membantu Lurah dalam pengkoordinasian pelaksana kebijakan penyelenggaraan kewenangan - kewenangan pemerintahan yang dilimpahkan oleh kecamatan dan tugas - tugas umum, kepegawaian, keuangan, dana perencanaan. Untuk melaksanakan tugas tersebut. Sekretariat Lurah mempunyai Tugas :
-
Membantu Lurah dibidang administrasi umum dan keuangan dalam penyelenggaraan tugas dan wewenang pemerintah kelurahan
-
Melaksanakan tugas Lurah dalam hal Lurah berhalangan
-
Melaksanakan tugas Lurah apabila Lurah diberhentikan sementara
-
Melasanakan tugas-tugas lain yang diberikan oleh Lurah
Serta tanggung jawab :
-
Perencanaan kegiatan dibidang administrasi umum dan keuangan
-
Pelaksanaan kegiatan dibidang administrasi umum dan keuangan
-
Pengkoordinasian kegiatan dibidang administrasi umum dan keuangan
-
Pengkoordinasian pelaksanaan tugas perangkat kelurahan lainnya
-
Kepala Seksi Tata Pemerintah
Kepala urusan umum mempunyai tugas membantu tugas-tugas sekretaris kelurahan dibidang :
-
Mengelola administrasi umum pemerintah kelurahan
-
Memberikan pelayanan kepada masyarakat dibidang kegiatan surat menyurat
-
Melaksanakan pengadaan dan pemeliharaan barang-barang inventaris kantor
-
Melaksanakan pengadaan dan pendistribusian alat-alat tulis kantor
-
Mengumpulkan, menyusun dan meyiapkan bahan rapat
-
Melakukan persiapan penyelenggaraan rapat, penerimaan tamu dinas dan kegiatan rumah tangga pemerintah kelurahan
-
Melakukan tugas lain yang diberikan oleh sekretaris kelurahan
Kepala Seksi Pemberdayaan Masyarakat
Kepala Seksi Pemberdayaan Masyarakat mempunyai tugas pokok membantu lurah dalam menyiapkan, menghimpun dan mengolah serta melaksanakan kegiatan di bidang pemberdayaan masyarakat :
-
Pembinaan dan pengawasan terhadap keseluruhan unit kerja baik pemerintah maupun swasta yang mempunyai program kerja dan kegiatan pemberdayaan masyarakat di wilayah kerja kelurahan
-
Evaluasi terhadap berbagai kegiatan pemberdayaan masyarakat di wilayah kelurahan baik yang dilakukan oleh unit kerja pemerintah maupun swasta
-
Pelaksanaan tugas-tugas lain di bidang pemberdayaan masyarakat sesuai dengan peraturan perundang-undangan;
-
Penyusunan laporan hasil pelaksanaan tugas dan pemberian saran pertimbangan kepada atasan sesuai bidang tugasnya
-
Pelaksanakan tugas lain yang di berikan oleh atasan sesuai bidang tugasnya.
Kepala Seksi Ekonomi dan Pembangunan
Seksi Ekonomi Dan Pembangunan adalah unsur pelaksana teknis operasional kewilayahan yang dipimpin oleh seorang Kepala Seksi berkedudukan dibawah dan bertanggung jawab kepada Camat melalui, Sekretaris dan mempunyai tugas – tugas sebagai berikut :
-
Mengumpulkan, mengolah dan menyiapkan data dibidang pemerintahan kelurahan, ketentraman, ketertiban dan perlindungan masyarakat
-
Mengumpulkan dan menyiapkan bahan dalam rangka pembinaan wilayah termasuk rukun warga dan rukun tetangga serta masyarakat
-
Melaksanakan administrasi pelaksanaan pemilihan umum, pemilihan presiden, pemilihan gubernur, pemilihan bupati, pemilihan Lurah dan kegiatan sosial politik
-
Melaksanakan administrasi kependudukan, catatan sipil dan monografi
-
Melaksanakan tugas dibidang pertanahan
-
Melakukan administrasi peraturan kelurahan, peraturan kepalakelurahan, dan keputusan Lurah
-
Melaksanakan tugas lain yang diberikan oleh Lurah
BPD (Bank Pembangunan Daerah)
BPD mempunyai fungsi menetapkan peraturan kelurahan bersama Lurah, menampung dan menyalurkan aspirasi masyarakat. Tugas :
-
Membahas rancangan peraturan kelurahan bersama Lurah
-
Melaksanakan pengawasan terhadap pelaksanaan peraturan kelurahan dan peraturan Lurah
-
Mengusulkan, pengangkatan dan pemberhentian Lurah
-
Membentuk panitia pemilihan Lurah
-
Menggali, menampung, menghimpun, merumuskan dan menyalurkan aspirasi masyarakat
-
Menyusun tata tertib BPD
-
Meminta keterangan kepada pemerintah kelurahan
-
Menyatakan pendapat Kewajiban
Dalam melaksanakan tugas, BPD mempunyai tanggung jawab :
-
Mengamalkan pancasila, melaksanakan UUD45 dan mentaati segala peraturan perundang-undangan
-
Melaksanakan kehidupan demokrasi dalam dalam penyelenggaraan pemerintahan kelurahan
-
Mempertahankan dan memelihara hukum nasional setra keutuhan NKRI (Negara Kesatuan Republik Indonesia)
-
Menyerap, menampung, menghimpun dan menindaklanjuti aspirasi masyarakat
-
Memproses pemilihan Lurah
-
Mendahulukan kepentingan umum diatas kepentingan pribadi, kelompok dan golongan
-
Menghormati nilai-nilai sosial budaya dan adat istiadat masyarakat setempat
-
Menjaga norma dan etika dalam hubungan kerja dengan lembaga kemasyarakatan
-
Rukun Warga (RW)
RW mempunyai tugas membantu tugas-tugas kelurahan dibidang :
-
Membantu pelaksanaan tugas kelurahan dalam wilayah kerjanya
-
Memelihara Kerukunan hidup warga
-
Melakukan pembinaan dalam rangka meningkatkan swadaya dan gotong royong masyarakat
-
Melakukan kegiatan penerangan tentang program pemerintah kepada masyarakat
-
Membantu kelurahan dalam pembinaan dan mengkoordinasikan kegiatan RT diwilayah kerjanya
Dalam melaksanakan tugas, RW mempunyai tanggung jawab :
-
Melaksanakan tugas lain yang diberikan oleh kelurahan
-
Melakukan koordinasi terhadap jalannya pemerintah kelurahan, pelaksanaan pembangunan dan pembinaan masyarakat diwilayahnya
-
Melakukan tugas dibidang pembangunan dan pembinaan kemasyarakatan yang menjadi tanggung jawabnya
-
Melakukan usaha dalam rangka meningkatkan partisipasi dan swadaya gotong royong masyarakat dan melakukan pembinaan perekonomian
-
Melakukan kegiatan dalam rangka pembinaan dan pemeliharaan ketrentaman dan ketertiban masyarakat
-
Melakukan fungsi-fungsi lain yang dilimpahkan oleh Kelurahan
-
Rukun Tetangga
RT mempunyai tugas membantu tugas-tugas kelurahan dibidang :
-
Membantu menjalankan tugas RW dalam pelayanan kepada masyarakat yang menjadi tanggung jawab kelurahan
-
Memelihara Kerukunan hidup tetangga
-
Menyusun rencana dan melaksanakan pembangunan dengan mengembangkan aspirasi dan swadaya murni masyarakat
Dalam melaksanakan tugas, RT mempunyai tanggung jawab :
-
Pengkoordinasian antar warga
-
Pelaksanaan dalam menjembatani hubungan antar sesama anggota masyarakat dengan Pemerintah Daerah
-
Penanganan masalah-masalah kemasyarakatan yang dihadapi warga
-
Tujuan Perancangan
Adapun tujuan perancangan sistem ini adalah untuk merancang pemilah tempat sampah otomatis organik dan anorganik di kelurahan poris plawad utara dengan menggunakan arduino uno sebagai media inputnya sehingga dapat di hasilkan sebuah alat yang dapat berguna untuk membantu petugas kebersihan dalam pengambilan sampah yang sudah terisi penuh dan terpisah secara otomatis.
Tata Laksana Sistem Yang Berjalan
Dalam Perancangan sistem yang dibutuhkan adalah seberapa jauh pihak stakeholder menginginkan output yang dihasilkan dari sistem tersebut. Dalam hal ini output yang diberikan oleh stakeholder adalah membuat sebuah sistem yang dapat mengurangi keterlambatan dalam pengambilan sampah dan pemisahan sampah secara otomatis.
Prosedur Sistem Yang Berjalan
Prosedur sistem pemilahan dan pengecekan sampah pada sistem yang berjalan pada saat ini terdiri dari beberapa alur, yakni sebagai berikut:
-
Petugas kebersihan mengecek tempat sampah pada kelurahan.
-
Apakah sampah sudah terisi penuh.
-
Jika sudah terisi penuh maka petugas kebersihan akan mengambil sampah tersebut.
Rancangan Prosedur Sistem Yang Berjalan
Flowchart Sistem Yang Berjalan
Prosedur Pengecekan tempat sampah pada Kelurahan Poris Plawad Utara Tangerang masih dilakukan secara manual dengan cara petugas kebersihan datang lalu mengecek kondisi tempat tersebut.
Berikut adalah flowchart sistem pengecekan tempat sampah pada kelurahan dengan cara petugas kebersihan mendatangi tempat sampah pada kelurahan, pada gambar 3.3

Dapat dijelaskan pada gambar 3.3 Flowchart sistem pengecekan tempat sampah pada Kelurahan Poris Plawad Utara :
-
Terdapat 2 (dua) simbol terminal yang berperan sebagai “Mulai” dan “Selesai” pada aliran flowchart sistem pengecekan tempat sampah.
-
Terdapat 2 (dua ) simbol proses, yang menyatakan sebuah proses pengecekan tempat sampah.
-
Terdapat 1 (satu) simbol decision, yang berperan menunjukan sebuah langkah pengmbilan keputusan jika “Ya” dan “Tidak”. Yaitu : Apakah sampah sudah terisi penuh. Jika “Ya” maka petugas kebersihan akan mengambil sampah.
Flowchart Sistem Yang Diusulkan

Dapat dijelaskan Pada gambar 3.4. flowchart sistem yang diusulkan di atas terdiri dari :
-
Terdapat 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pemilah sampah otomatis yang berjalan.
-
Terdapat 9 (sembilan) simbol proses yang menyatakan sebuah proses pemilah sampah otomatis organik dan anorganik.
-
Terdapat 3 (tiga) simbol inputan yang menyatakan sensor warna membaca jenis warna sampah sensor ultrasonik membaca ketinggian sampah dan sensor metal membaca jenis sampah yang masuk.
-
Terdapat 3 (Tiga) simbol decision yang berperan menunjukan sebuah langkah pengambilan keputusan jika “Ya” dan “Tidak”. Yaitu : apakah sampah yang terdeteksi warna hijau. Jika “Tidak” maka akan di pisahkan ke tempat sampah 2. Jika “Ya” maka sampah terdeteksi organik dan akan dipisahkan ke tempat sampah 1.
Diagram Blok
Agar mempermudah penulis dalam menjelaskan perancangan perangkat keras (Hardware), maka di gambarkan alur dan cara kerja perangkat keras pada rangkaian diagram blok pada gambar 3.5. di bawah :

Pada Gambar 3.5 merupakan diagram blok dimana terdapat konfigurasi seluruh rangkaian yang digunakan.
Keterangan :
-
Sensor Warna merupakan komponen yang digunakan untuk membedakan jenis warna.
-
LCD merupakan komponen yang digunakan untuk menampilkan jenis sampah.
-
Sensor Ultrasonik merupakan komponen yang digunakan untuk membaca ketinggian sampah.
-
Sensor Metal merupakan komponen yang digunakan untuk membedakan jenis sampah organik dan non organik.
-
LED merupakan komponen yang digunakan sebagai indikator ketika sampah terisi penuh.
-
Buzzer merupakan komponen yang digunakan sebagai notifikasi ketika sampah terisi penuh.
-
Motor Servo merupakan komponen yang digunakan untuk menggerakan pintu tempat sampah.
-
Tempat sampah sebagai wadah sampah organik dan anorganik.
Cara Kerja Alat
Pada sistem ini dapat dijelaskan cara kerja alat yaitu, penggunaan mikrokontroler Arduino sebagai tempat pemrosesan data yang diinput dari perangkat-perangkat yang telah di program, sehingga ketika sampah dimasukan kedalam tempat sampah sensor yang terdapat di dalam tempat sampah akan membaca jenis sampah yang masuk, lalu secara otomatis akan dipisahkan sesuai jenis sampah tersebut, dan ketika sampah telah terisi penuh maka led akan menyala dan buzzer akan berbunyi.
Perancangan Alat
Pada saat ini yang dimaksudkan meliputi perancangan perangkat keras (Hardware) dan perangkat lunak (Software).
Perancangan sistem secara keseluruhan memerlukan beberapa alat dan bahan yang digunakan, berikut alat dan bahan :
Alat yang digunakan meliputi :
-
Personal Computer (PC) / Laptop
-
Arduino Uno
-
Software Ide Arduino
-
Software Fritzing (Untuk Menggambar Schematic)
-
Sensor Warna TCS3200
-
Sensor Metal
-
Motor Servo
-
LCD 16 x 2
-
Buzzer
-
Sensor Ultrasonik
-
LED
Bahan-bahan yang digunakan :
-
Timah Solder
-
Resistor
-
Akrilik
-
Lem Bakar
-
Tempat Sampah
Perancangan Perangkat Keras (Hardware)
Perancangan Skematik Perangkat Keras (Hardware)
Dalam pembuatan skematik diperlukan sebuah aplikasi yaitu Fritzing. Fritzing merupakan sebuah software yang bersifat open source untuk merancang rangkaian elektronika. Software tersebut mendukung para penggemar elektronika untuk membuat prototipe produk dengan merancang rangkaian berbasis mikrokontroller Arduino Uno. Memungkinkan para perancang elektronika pemula sekalipun untuk membuat layout PCB yang bersifat custom. Tampilan dan penjelasan yang ada pada Fritzing bisa dengan mudah dipahami oleh seseorang yang baru pertama kali menggunakannya. Dan untuk memulai program Fritzing dapat dilihat sebagai berikut:

Setelah melakukan langkah diatas, akan muncul tampilan utama pada layar kerja Fritzing, dan dapat dilihat seperti gambar berikut.

Sebelum memulai menggambar skematik ada baiknya kita menyimpan terlebih dahulu, adapun langkah-langkahnya akan terlihat seperti gambar berikut.

Setelah melakukan langkah diatas maka akan masuk ke tampilan breadboard dimana tampilan tersebut digunakan untuk mengimpor komponen yang ada toolbox di jendela Part nya. Adapun tampilannya dapat dilihat seperti gambar berikut.

- Rangkaian Power Supply
Agar alat yang dibuat dapat bekerja sesuai fungsinya, maka diperlukan sumber tegangan listrik sebagai catu daya. Rangkaian catu daya yang digunakan mendapatkan sumber tegangan dari adaptor switching dengan output 12 volt. Tegangan tersebut kemudian diturunkan menjadi 5 volt tegangan DC, melalui IC regulator LM7805.

- Rangkaian Sensor Warna TCS3200
Pada rangkaian alat ini sensor warna TCS3200 berfungsi sebagai pembeda jenis warna sampah, Sensor Warna TCS3200 menggunakan chip TAOS TCS3200 RGB. Modul ini telah terintegrasi dengan 4 LED. Sensor warna TCS3200 dapat mendeteksi dan mengukur intensitas warna tampak. Beberapa aplikasi yang menggunakan sensor ini di antaranya : pembacaan warna, pengelompokan barang berdasarkan warna, ambient light sensing and caliboration, pencocokan warna, dan banyak aplikasi lainnya. Chip TCS3200 memiliki beberapa photodetector, dengan masing – masing filter warna yaitu: merah, hijau, biru, dan clear.

- Rangkaian Buzzer
Dalam rangkaian ini buzzer berfungsi sebagai notifikasi apabila sampah telah terisi penuh, Buzzer merupakan komponen yang berfungsi untuk mengelurkan suara, prinsip kerjanya pada dasarnya hampir sama dengan loudspeaker, jadi buzzer juga terdiri atas kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut di aliri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik kedalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).

- Rangkaian Sensor Metal
Pada Rangkaian ini sensor metal digunakan sebagai pendeteksi Logam, Besi untuk membedakan jenis sampah organik dan non organik, Metal Detector adalah sebuah alat yang dapat digunakan untuk mendeteksi keberadaan logam yang ada di atas atau di bawah permukaan tanah dalam gerak tertentu. Logam yang dapat di deteksi dalam rangkaian detektor logam ini adalah benda logam yang mengandung unsur besi atau dapat mempengaruhi medan magnet.

- Rangkaian Servo
Pada rangkaian alat ini Servo digunakan sebagai penggerak otomatis tutup tempat sampah, Sensor Ultrasonik adalah sensor pengukur jarak atau objek. Ultrasonik sering digunakan untuk keperluan mengukur jarak sebuah benda atau mendeteksi halangan.

- Rangkaian LED
Pada rangkaian alat ini Led digunakan sebagai indikator pembeda sampah ketika penuh, LED adalah semikonduktor yang dapat mengubah energi listrik lebih banyak menjadi cahaya, merupakan perangkat keras dan padat (solid-state component) sehingga lebih unggul dalam ketahanan (durability).

- Rangkaian Sensor Ultrasonik
Pada rangkaian alat ini ultrasonik digunakan sebagai pembaca ketinggian sampah, Sensor Ultrasonik adalah sensor pengukur jarak atau objek. Ultrasonik sering digunakan untuk keperluan mengukur jarak sebuah benda atau mendeteksi halangan.

- Rangkaian LCD Display
Pada rangkaian alat ini LCD digunakan sebagai output untuk menampilkan jenis sampah, LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang mengubah kristal cair sebagai penampil utama. LCD dapat memunculkan tulisan karena terdapat banyak pixel yang terdiri dari satu buah kristal cair sebagai titik cahaya.

- Rangkaian Keseluruhan
Setelah melakukan perancangan perangkat keras dari seluruh komponen dan bahan yang digunakan, maka rangkaian sistem keseluruhan akan terlihat seperti gambar 3.18 sebagai berikut:

Konsep Perancangan Perangkat Lunak (Software)
Perancagan perangkat lunak adalah melakukan penulisan listing program ke dalam software Arduino IDE versi 1.8.0 dengan menggunakan bahasa C, dimana perintahperintah program tersebut akan di eksekusi oleh hardware atau sistem yang dibuat.
Penulisan Listen Program Bahasa C Pada Software Arduino
Pada perancangan perangkat lunak menggunakan program Arduino 1.8.0 untuk menuliskan listing program dan menyimpannya. Software Arduino 1.8.0 sebagai media yang digunakan mengupload program ke dalam Arduino Uno, sehingga Arduino Uno dapat bekerja sesuai dengan yang diperhatikan. Adapun langkahlangkah untuk memulai menjalankan software Arduino IDE 1.8.0 dapat dilihat seperti pada gambar sebagai berikut :

Dalam pemrograman arduino yang akan dibuat, untuk menuliskan listing program dapat dilihat pada gambar 3.19 sebagai berikut

Setelah form utama program Arduino ditampilkan, maka langkah selanjutnya adalah mengkonfigurasi pengalamatan port koneksi yang ada pada device manager

Langkah diatas merupakan langkah-langkah untuk membuka layar device manager, dimana langkah-langkah diatas dimulai dari membuka tombol start yang ada pada sistem operasi windows, setelah itu akan muncul layar yang terdapat pada gambar 3.22 sebagai berikut:


Seting koneksi port pada Arduino dilakukan agar pada saat program di upload tidak terjadi error karena kesalahan pada pengalamatan port yang sebelumnya di setting juga melalui device manager

Gambar diatas menunjukan pemilihan board arduino yang akan dipakai, ketika hendak menggunakan board arduino yang akan dipakai yang perlu diperhatikan adalah tipe board arduino, karena arduino memiliki banyak sekali jenis yang dapat digunakan dalam project mikrokontroller. Dalam pembuatan project ini penulis menggunakan board arduino dengan tipe arduino uno, yang dimana arduino uno ini terdapat chip mikrokontroller yang di pakai dalam project ini

Setelah IDE arduino terbuka yang perlu diperhatikan juga adalah bagaimana hasil dari program yang ditulis pada IDE arduino dapat disimpan dengan cara dan langkah-langkah seperti diatas dan menyimpan listing program dengan nama berekstensi .pde

Jendela diatas menggambarkan dari proses penyimpanan sebuah project baik yang akan di buat maupun yang sudah di tulis yang nantinya akan disimpan dalam sebuah folder tergantung dimana drive yang diinginkan. Setelah melakukan penyimpanan file program, selanjutnya tahap penulisan listing program, dapat di lihat pada gambar 3.26 sebagai berikut:

Dan berikut adalah gambar listing program keseluruhan yang digunakan dengan demikian baru sistem arduino dapat bekerja sesuai dengan apa yang diinginkan, selanjutnya lakukan penulisan listing program secara keseluruhan.


Setelah melakukan penulisan program secara keseluruhan maka proses selanjutnya adalah melakukan proses kompilasi atau melakukan pengecekan terhadap baris program yang masih salah, adapun langkah-langkahnya dapat dilihat pada gambar berikut.

Proses kompilasi untuk mengecek apakah listing program yang ditulis terjadi kesalahan atau tidak dan pada saat yang bersamaan ketika terjadi error maka program tersebut tidak dapat diupload kedalam mikrokontroler.

Pada gambar 3.30 Menunjukkan hasil dari kompilasi listing program dan hasil proses kompilasi tidak terjadi error artinya proses penulisan listing program sudah benar, hasil dari kompilasi inilah yang nantinya akan ditanamkan kedalam sistem mikrokontroler melalui board arduino uno.
Pembuatan Program Kedalam Board Arduino
Mikrokontroller bisa bekerja jika di dalamnya sudah dimasukan listing program, program yang akan dimasukan kedalam mikrokontroler melalui board arduino yaitu program aplikasi yang dibuat dengan aplikasi IDE Arduino. Untuk melakukan pengisian program menggunakan perangkat keras (Hardware) dan perangkat lunak (Software).
Arduino sebagai media untuk memasukan program ke dalam mikrokontroller, maka program yang ditulis pada ide IDE Arduino dapat langsung dimasukan kedalam mikrokontroller. Langkah selanjutnya sebelum listing program dimasukan ke dalam mikrokontroller, yang perlu diperhatikan yaitu jenis board yang akan digunakan pada saat memasukan listing program, proses pemilihan board yang digunakan untuk memasukan listing program dapat dilihat pada gambar 3.31. sebagai berikut:

Setelah jenis board sudah dipilih, langkah selanjutnya adalah memasukan program ke dalam mikrokontroller dengan menggunakan Modul Arduino Uno. Adapun langkah-langkahnya dapat dilihat pada gambar berikut :

Pada tampilan pemrograman IDE Arduino diatas, dilakukan dengan mengklik tombol upload yang ada pada IDE Arduino, pada saat mengupload listing program secara otomatis akan menampilkan pesan bahwa proses upload program tidak terjadi error atau sukses. Proses upload listing program yang tidak terjadi error dapat dilihat pada gambar 3.33 sebagai berikut:

Setelah langkah mengupload listing program selesai, maka sistem mikrokontroler sudah dapat bekerja sesuai dengan program yang sudah dibuat.
Permasalahan Yang Dihadapi Dan Alternatif Pemecahan Masalah
Permasalahan Yang Dihadapi
Berdasarkan hasil dari observasi serta wawancara yang telah dilakukan sebelumnya mengenai Pemilah sampah organik dan non organik pada kelurahan poris plawad utara, Maka dapat disimpulkan bahwa analisa permasalahan yang dihadapi pada penelitian ini adalah sebagai berikut :
-
Proses pengecekan tempat sampah masih dilakukan dengan cara petugas kebersihan mengecek tempat sampah ke tiap-tiap ruangan kantor
-
Terbatasnya jumlah petugas kebersihan dalam suatu kantor
-
Kurangnya kesadaran masyarakat membuang sampah organik dan nonorganik pada tempat sampah yang sudah disediakan
-
Tidak adanya peringatan ketika sampah terisi penuh
Alternatif Pemecahan Masalah
Berdasarkan analisa permasalahan yang telah disebutkan, maka penulis memberikan alternatif pemecahan masalah yaitu sebagai berikut :
-
Proses pengecekan tempat sampah dapat berlangsung dengan mudah, sehingga petugas kebersihan tidak perlu mengecek tempat sampah tiap-tiap rungan kantor sehingga proses pengecekan tempat sampah menjadi lebih baik dan modern.
-
Proses pemilah sampah menggunakan prototype tempat sampah pemilah otomatis berbasis mikrokontroller Arduino Uno dapat mempermudah petugas kebersihan sehingga petugas kebersihan tidak perlu memisahkan sampah secara manual.
-
Adanya alarm berupa bunyi buzzer ketika sampah terisi penuh, sehingga sampah tidak menumpuk pada ruang kantor.
User Requirement
Pada User Requirement ini berisi tabel Elisitasi I, II, III dan final. Pembuatan elisitasi dapat dibuktikan berdasarkan pada observasi dan wawancara.
Elisitasi Tahap I
Elisitasi tahap I disusun berdasarkan hasil wawancara dengan stakeholder mengenai seluruh rancangan sistem yang akan dibuat.

Elisitasi Tahap II
Elisitasi tahap II merupakan hasil pengklasifikasian dari elisitasi tahap I berdasarkan metode MDI. Metode MDI ini bertujuan untuk memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh penulis untuk dieksekusi.
-
M pada MDI artinya Mandatory (dibutuhkan atau penting) Maksudnya, elisitasi tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
-
D pada MDI artinya Desirable (diinginkan atau tidak terlalu penting) Maksudnya, elisitasi tersebut tidak terlalu penting dan boleh dihilangkan, tetapi jika elisitasi tersebut digunakan dalam pembuatan sistem maka membuat sistem tersebut lebih sempurna.
-
I pada MDI artinya Inessential (diluar sistem atau dieliminasi) Maksudnya, adalah elisitasi tersebut bukan bagian dari sistem yang dibahas dan merupakan bagian dari luar sistem.


Elisitasi Tahap III
Elisitasi tahap III merupakan hasil penyusutan dari elisitasi tahap II dengan cara mengeliminasi semua requirement yang optionnya "I" pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali dengan metode TOE. Berikut ini adalah penjelasan mengenai TOE:
- T (Technical)
Maksudnya, adalah pertanyaan perihal bagaimana tata cara atau teknik pembuatan elisitasi tersebut dalam sistem yang diusulkan?
- O (Operational)
Maksudnya, adalah pertanyaan perihal bagaimana tata cara penggunaan elisitasi tersebut dalam sistem yang akan dikembangkan?
- E (Economic)
Maksudnya, adalah pertanyaan perihal berapakah biaya yang diperlukan guna membangun elisitasi tersebut didalam sistem.
Metode tersebut dibagi kembali menjadi beberapa option, antara lain:
-
L (Low): Mudah untuk dikerjakan.
-
M (Middle): Mampu untuk dikerjakan.
-
H (High): Sulit untuk dikerjakan karena teknik pembuatan dan penggunaannya sulit serta biayanya mahal, sehingga elisitasi tersebut harus dieliminasi.


-
Keterangan :
T : Technical
O : Operating
E : Economic
L : Low
M : Middle
H : High
Final Draft Elisitasi
Final Draft Elisitasi merupakan bentuk akhir dari tahap-tahap elisitasi yang dapat dijadikan acuan dan dasar untuk mengimplementasikan Prototype Pemilah Sampah Organik dan Non Organik Berdasarkan Elisitasi Tahap III di atas, dihasilkan Final Draft Elisitasi yang diharapkan dapat mempermudah penulis dalam mengimplementasikan sistem.


BAB IV
Uji Coba
Setelah melakukan perancangan dan pemasangan komponen, selanjutnya adalah melakukan serangkain uji coba pada masing-masing blok rangkaian yang bertujuan untuk mendapatkan kesesuaian spesifikasi dan hasil yang diinginkan. Untuk lebih jelasnya mengenai pembagian hasil uji coba dilakukan pada sub bab berikut.
Metode Black Box
Berikut ini adalah tabel pengujian black box berdasarkan Prototype Pemilah Sampah Organik dan Non Organik Pada Keluran Poris Plawad Utara, untuk pengujian pada sistem yaitu sebagai berikut :
Pengujian Black Box Sistem Pada Sesnor Warna

Pengujian Black Box Sistem Pada Sensor Metal

Uji Coba Hardware
Pengujian Rangkaian Catu Daya
Catu daya sebagai sumber tegangan pergerakan alat merupakan bagian yang sangat penting. Dalam merealisasi sistem alat ini dibutuhkan catu daya. untuk Arduino Uno, Sensor Warna, Sensor Metal, LCD, Ultrasonik, Servo, Led dan Buzzer membutuhkan tegangan sebesar 12v untuk dapat bekerja.
Pengujian Catu Daya untuk Arduino Uno dilakukan dengan cara menggunakan multitester. Ujung multitester berwarna merah dihubungkan ke pada pin positif pada soket USB dan ujung multitester berwarna hitam dihubungkan ke pin negatif pada soket USB.
Dari hasil uji catu daya di dapatkan hasil yang cukup stabil dan membuat sistem dapat bekerja sesuai dengan harapan, sehingga pada rangkaian catu daya ini sudah dapat digunakan dengan baik.

Setelah dilakukan pengujian sesuai gambar 4.1 di dapatkan hasil tegangan yang keluar dari Catu Daya sebesar 5v dengan arus 2 Ampere. Hasil ini bias dikatakan cukup untuk menghidupkan Arduino, Sensor Warna, Sensor Metal, Servo, Ultrasonik, LCD, Led, dan Buzzer. Hasil pengukuran keluaran dapat dilihat pada Tabel 4.3 berikut ini.


Keterangan :
-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 12Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

-
Tegangan keluaran tanpa beban, diukur pada IC Regulator LM7805 untuk catu daya, dimana idealnya tegangan keluaran dari catu daya adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk maka toleransi penyimpangan sebesar :

Pengujian Rangkaian Motor Servo
Motor servo merupakan suatu perangkat atau actuator putar yang dirancang dengan system control umpan balik loop tertutup. Sehingga motor servo dapat di set up atau diatur untuk menentukan posisi sudut. Pada pengujiannya, motor servo menggunakan program yang di input kedalam Arduino Uno yaitu dengan cara memasukkan program ‘sweep’.
Rangkaian motor servo digunakan untuk membuka dan menutup otomatis pintu tempat sampah.

Dalam pengujian motor servo menggunkan listing prongram seperti dibawah ini :

Berdasarkan listing program diatas maka cara kerja dari motor servo adalah apabila sensor mendeteksi sampah organik atau non organik maka salah satu pintu tempat sampah akan terbuka.

Pengujian Rangkaian Sensor Ultrasonik
Sensor Ultrasonik merupakan sensor yang bekerja berdasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu.

Adapun listing program yang digunakan pada pengujian sensor ultrasonik ini adalah :

Dari hasil pengujian listing program sebelumnya, sensor ultrasonik di uji dalam membaca objek yang ada di dalam tempat sampah dengan mengeluarkan gelombang suara yang akan dipantulkan kembali oleh objek yang ada didepannya, dalam jarak juga bisa diatur sesuai dengan keinginan. Adapun gambar hasil pengujian sensor Ultrasonik sebagai berikut :


Pengujian Rangkaian Lampu Indikator
Lampu LED adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki fungsi untuk menunjukkan status dari perangkat elektronika tersebut. Pada pengujian ini lampu LED berfungsi sebagai indikator ketika salah satu tempat sampah penuh.

Dari gambar diatas dibutuhkan listing program ‘blink’ terhadap komponen LED. Berikut adalah uji rangkaian LED :

Dari hasil program diatas akan berjalan terus menerus selama masih ada aliran listrik yang mengalir, dikarenakan program yang dipakai adalah ‘blink’ tanpa ada device yang mengontrol. Hasil uji coba ‘blink’ ada pada gambar berikut :


Pengujian Rangkaian Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara.
Pada rangkaian ujicoba ini buzzer berfungsi sebagai notifikasi ketika tempat sampah telah terisi penuh.

Dalam pengujian Buzzer ini menggunkan listing prongram seperti dibawah ini :

Berdasarkan listing program diatas maka cara kerja dari buzzer adalah apabila sensor ultrasonik membaca ketinggian sampah, maka secara otomatis buzzer akan aktif.

Flowchart Yang Diusulkan
Dalam pembuatan sistem dan perancangan dapat digambarkan dalam bentuk flowchart sehingga dapat mempermudah dalam melakukan dan merancang langkah-langkah atau proses dengan benar. Adapun bentuk dari flowchart keseluruhan dari sistem yang dibuat dapat dilihat pada gambar berikut :

Dapat dijelaskan Pada gambar 4.16 flowchart sistem yang diusulkan di atas terdiri dari :
-
Terdapat 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pemilah sampah otomatis yang berjalan.
-
Terdapat 11 (sebelas) simbol proses yang menyatakan sebuah proses pemilah sampah otomatis organik dan anorganik.
-
Terdapat 3 (tiga) simbol inputan yang menyatakan sensor warna membaca jenis warna sampah sensor ultrasonik membaca ketinggian sampah dan sensor metal membaca jenis sampah yang masuk.
-
Terdapat 3 (Tiga) simbol decision yang berperan menunjukan sebuah langkah pengambilan keputusan jika “Ya” dan “Tidak”. Yaitu : apakah sampah yang terdeteksi warna hijau. Jika “Tidak” maka akan di pisahkan ke tempat sampah 2. Jika “Ya” maka sampah terdeteksi organik dan akan dipisahkan ke tempat sampah 1.
Rancangan Program
Tahap pertama untuk pembuatan suatu alat dan program adalah tahap perancangan, digunakan sebagai tolak ukur perancangan yang harus sesuai dengan kebutuhan. Dengan demikian hasil perancangan akan di jadikan sebagai acuan untuk perakitan alat dan pembuatan program. Pada dasarnya tujuan dari perancangan program adalah untuk mempermudah didalam merealisasikan pembuatan alat dan program yang sesuai dengan apa yang diharapkan.
Perancangan Perangkat Lunak Untuk Arduino Uno
Sistem perangkat lunak yang dimaksud adalah Arduino IDE yang merupakan perangkat lunak untuk menuliskan listing program Arduino, sehingga sistem pada Arduino yang di buat dapat bekerja sesuai dengan apa yang di inginkan. Pada perancangan perangkat lunak untuk Arduino menggunakan bahasa pemrograman C# yang dimana listing programnya dapat di compile dan di upload langsung kedalam Arduino dengan Arduino IDE, adapun tampilan jendela Arduino IDE pada saat listing program ditulis seperti yang terlihat pada gambar 4.17 berikut :

Adapun tahap yang dilakukan adalah menulis listing program ¬> mengecek kesalahan terhadap listing program yang ditulis ¬> meng¬upload listing program kedalam arduino. Adapun langkah - ¬langkah tersebut dapat di lihat seperti gambar 4.18 berikut:

Konfigurasi Sistem Usulan
Pada perancangan sistem usulan ini terdapat beberapa hardware ataupun software yang digunakan yaitu untuk melakukan perancangan dan membuat program. Adapun perangkat keras (hardware) dan perangkat lunak (software) yang digunakan dapat di lihat pada sub bab berikut ini.
Spesifikasi Hardware
Pada spesifikasi perangkat keras (hardware) dibawah ini merupakan perangkat keras atau modul yang digunakan, memiliki fungsi dan kegunaan masing¬ - masing, serta dapat digambarkan secara garis besar saja tidak secara detail dalam pembuatan suatu modul tersebut. Adapun perangkat keras (hardware) yang digunakan meliputi sebagai berikut:
-
Laptop: ASUS (Processor AMD DualCore E450-1.66 Ghz, Chipset AMD, Memory 2 GB DDR SODIMM PC-10600, HardDisk 500 GB Serial ATA 5400 RPM, VGA AMD Radeon 6290)
-
Arduino Uno
-
Adaptor Micro USB 5V 2A
-
Sensor Warna
-
Sensor Metal
-
LCD
-
Servo
-
Sensor Ultrasonik
-
Buzzer
-
LED
Spesifikasi Software
Pada spesifikasi perangkat lunak (software) dibawah ini merupakan aplikasi yang digunakan untuk membuat program, merancang alur diagram, meng¬edit program, sebagai interface, media untuk meng¬upload program dan meng¬edit suatu gambar. Adapun perangkat lunak (software) yang digunakan meliputi sebagai berikut:
-
Microsoft Office 2016
-
Mozilla Firefox
-
IDE Arduino 1.8.1
-
Paint
-
Fritzing
Hak Akses
Dalam membuat sebuah sistem perangkat keras (hardware) perlu adanya sebuah hak akses baik oleh petugas yang berwenang atau seseorang yang menjabat sebagai pemegang hak akses sangat diperlukan untuk keamanan dari sistem perangkat lunak (software) ataupun perangkat keras (hardware) yang dirancang. Berikut ini yang mempunyai hak akses untuk menggunakan Prototype Pemilah Sampah Organik dan Non Organik adalah petugas kebersihan pada Kelurahan Poris Plawad Utara.
Testing
Pada tahap testing dilakukan pengujian terhadap sistem yang dibuat yaitu dengan menggunakan metode BlackBox testing, adapun pengujian dilakukan melalui interface Arduino IDE, dimana pengujian tersebut agar dapat mengetahui fungsionalitas dari suatu interface yang dirancang, adapun tahapannya tersebut untuk menemukan kesalahan dalam beberapa kategori, diantaranya adalah sebagai berikut
-
Dengan memperhatikan fungsi-fungsi yang digunakan, seperti fungsi untuk berkomunikasi dengan piranti lain dengan memperhatikan fungsionalitasnya
-
Memperhatikan kesalahan-kesalahan yang dapat terjadi ketika melakukan debug ataupun running program
-
Dengan memperhatikan struktur performa sehingga aplikasi dapat digunakan dengan baik dan mendukung sistem yang dibuat
-
Dengan memperhatikan kesalahan-kesalahan inisialisasi fungsi yang digunakan dalam berinteraksi dengan piranti lain
Pengujian dengan metode BlackBox sangat memperhatikan pada fungsi fungsional dari suatu program dengan melakukan pendekatan yang melengkapi untuk menemuka kesalahan atau error.
Implementasi
Pada tahap ini merupakan tahap-tahap untuk merealisasikan dari sistem yang dirancang yang dimulai dari tahap pengumpulan data-data yang diharapkan dapat membantu dan mendukung sehingga sampai tercapainya dalam penerapannya.
Schedule
Berdasarkan data yang dikumpulkan, sehingga prototype pemilah sampah organik dan non organik dapat dirancang dan dibuat, penulis melakukan pendekatan terhadap pihak yang berkaitan dan merupakan tempat observasi penulis. Hal ini dilakukan demi terciptanya suatu alat yang dapat memisahkan sampah organik dan non organik sehingga mempermudah petugas kebersihan dalam melakukan pengecekan tempat sampah yang terisi penuh, sedangkan penulis sangat perlu melakukan pendekatan tesebut karena ada beberapa hal yang akan menjadi kendala ketika dalam proses perancangan dan pembuatan. Adapaun jadwal yang dilakukan dalam proses mulai perancangan hingga selesai disajikan pada tabel sebagai berikut :

Estimasi Biaya
Berikut ini adalah rincian biaya yang di keluarkan dari pembuatan alat ini yaitu sebagai berikut:

BAB V
Kesimpulan
Adapun beberapa kesimpulan yang melatar belakangi penelitian prototype pemilah sampah organik dan non organik adalah :
-
Untuk meningkatkan kesadaran dan pengetahuan masyarakat untuk membuang sampah pada tempat yang telah disediakan, perlu diakadakan sosialisasi yang berkesinambungan secara menyeluruh dan bertahap yang dilakukan oleh berbagai pihak terhadap masyarakat sehingga masyarakat akan tahu dan terbiasa untuk membuang sampah pada tempatnya.
-
Dengan memanfaatkan sensor warna TCS 3200 sebagai pembeda jenis warna pada pemilah sampah otomatis, maka ketika sampah yang masuk pada tempat sampah berwarna hijau, sensor akan mendeteksi jenis sampah organik yang masuk maka akan secara otomatis servo aktif untuk membuka pintu tempat sampah dan dipisahkan ke tempat sampah organik, selain warna hijau maka akan dipisah ke tempat sampah non organik , dan dengan menggunakan sensor metal sebagai pendeteksi sampah non organik, untuk mendeteksi sampah berjenis kaleng, logam, plastik, jika jenis sampah tersebut terdeteksi maka akan secara otomatis dipisahkan ke tempat sampah non organik, lalu sensor untrasonik sebagai pembaca ketingiian sampah, jika sampah tersebut sudah memenuhi tempat sampah maka akan ada notifikasi berupa bunyi buzzer dan nyala lampu led, menandakan bahwa tempat sampah tersebut sudah terisi penuh dengan sampah, sehingga petugas kebersihan dapat langsung mengambil sampah tersebut.
-
Seperti prototype alat yang telah saya rancang, dengan menggunakan sensor warna TCS 3200 sebagai pembeda jenis warna organik dan non organik, sensor metal sebagai pendeteksi sampah non organik, servo sebagai penggerak tutup tempat sampah, sensor ultrasonik sebagai pembaca ketinggian sampah, lalu buzzer dan lampu led sebagai notifikasi ketika sampah telah terisi penuh, sehingga tidak ada lagi sampah menumpuk pada ruangan kantor karena petugas kebersihan dapat langsung mengambil sampah tersebut dan tidak perlu mengecek tiap-tiap tempat sampah yang ada pada kelurahan poris plawad utara.
Saran
Saran yang dapat disampaikan oleh penulis adalah agar penelitian berikutnya bisa mengembangkan sistem ini lebih baik lagi, sehingga kekurangan yang ada bisa dilengkap atau diperbaiki. Saran yang dapat digunakan sebagai bahan pertimbangannya adalah sebagai berikut
-
Untuk pengembangan kedepannya dapat di tambahkan jenis sampah B3 dan sensor yang dapat memisahkan sampah berjenis B3 (Bahan Berbaya dan Beracun)
-
Dapat di integrasikan dengan smartphone, sehingga petugas kebersihan akan menerima notifikasi ketika sampah terisi penuh.
-
Dapat di tambahkannya sensor yang dapat menguraikan sampah yang terbungkus dan terisi dengan berbagai jenis sampah, agar bisa dipisahkan secara otomatis.
-
Perlu ditambahkan sensor yang dapat membedakan botol berwarna hijau dengan sampah organik yang berwarna hijau.
DAFTAR PUSTAKA
DAFTAR PUSTAKA
- ↑ Nurajizah, Siti. 2015. “Sistem Informasi Perpustakaan Berbasis Web Dengan Metode Prototype: Studi Kasus Sekolah Islam Gema Nurani Bekasi” Prosiding SNIT (Seminar Nasinonal Inovasi dan Tren) 2015: Hal. A-214
- ↑ Rumini dkk. 2014. “Perancangan E-Learning di MTI STMIK AMIKOM YOGRAKARTA” Jurnal Teknologi Informasi, Vol. IX Nomor 25. Maret 2014 ISSN: 1907-2430.
- ↑ Yuniarti. Ika. 2016 “Sistem Informasi Layanan Rawat Jalan Pada Puskesmas Kapuan Dengan Menggunakan Metode Prototipe”.
- ↑ Widawati. Enny dkk. 2014. “Kajian Potensi Pengolahan Sampah” (Studi: Kampung Banjarsari). Jurnal Metris ISSN : 1411-3287.
- ↑ Gandes. Agung. Gade dkk. 2013 “Perancangan Sistem Pengelolaan Sampah Di Kabupaten Kuningan”. Jurnal Kontruksi, Vol. 1, No.2, Oktober 2013 ISSN : 2085-8744.
- ↑ Sentosa. Sandra, Soemarno. 2014 “Peningkatan Nilai Kalor Produk Pada Produk Proses Bio-drying Sampah Organik”. Indonesian Green Technology Journal, Vol. 3, No. 1, 2014 E-ISSN : 2338-1787.
- ↑ Rianti. Eva. Pratama Noval Robby. 2016. “Perancangan Aplikasi Sistem Pendukung Keputusan Pemilihan Peserta Olimpiade Sains Tingkat Kabupaten SMPN 7 SIJUNJUNG Menggunakan Metode Analytical Hierarchy Process”. Jurnal Sains dan Informatika Vol. 2 No. 2. 2016. ISSN : 2459-9549.
- ↑ 8,0 8,1 8,2 Ekawati, Henny, dkk. 2015 “Sistem Informasi Pengagendaan Surat Keluar Masuk Pada Satuan Kerja Perangkat Daerah Kecamatan Pilanharjo Dengan Aplikasi Multi User” Jurnal Ilmiah SINUS ISSN : 1693-1173.
- ↑ 9,0 9,1 Prayudha, Jaka, Novriansyah Dicky. 2014. “Otomatisasi Pendeteksi Jarak Aman Dan Intensitas Cahaya Dalam Menonton Televisi Dengan Metode Perbandingan Diagonal Layar Berbasis Mikrokontroler ATMega 8535” Jurnal Ilmiah SAINTIKOM (Sains dan Komputer) Vol.13,No.3.2014.
- ↑ Prastyawan. Devid, dkk. 2014 “Implementasi Model Robot Edukasi Menggunakan Mikrokontroler ATMega8 Untuk Robot Pemadam Api” IJNS (Indonesian Journal on Networking and Security) ISSN : 2302-5700.
- ↑ Saefullah dkk dalam jurnal CCIT Vol.2 No.3 (2013:1) Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaran
- ↑ Yenni. Helda, Benny. 2016 “Perangkat Pemberi Pakan Otomatis Pada Kolam Budidaya”. Jurnal Ilmiah Media Internasional Media Prosesor, Vol. 11, No. 2 Oktober 2016 ISSN : 1907-6738.
- ↑ Silvia. Fitriai dkk. 2014 “Rancang Bangun Akses Kontrol Pintu Gerbang Berbasis Arduino Dan Android”. Jurnal UPI, Electrans, Vol. 13, No. 1 Maret 2014 ISSN : 1412-3762.
- ↑ Sausan. Syadza, Syaryadhi. Mohd, Rahman. Aulia. 2016 “Perancangan Prototipe Sistem Pendeteksi Posisi Korban Bencana Berbasis Mikrikontroler AtMegaA328”. Jurnal Online Teknik Elektro, Vol.1, No.3, 2016:35-42 ISSN : 2252-7036.
- ↑ Mandari, Yopi, Pangaribowo, Triyanto.2016 “Rancang Bangun Sistem Robot Penyortir Benda Berdasarkan Warna Berbasis Arduino” Jurnal Teknologi Elektro ISSN:2086-9479 Vol.7 No.2, 2016
- ↑ Pratiwi, Indah Dwi, Rifai, Muhamad, Budiman, Fajar.2017 “ Rancang Bangun Deteksi Jalur Pipa Terpendam Menggunakan Mobile Robot Dengan Metal Detector” Jurnal TEKNIK ITS Vol.6, No.1, (2017) ISSN: 2337-3539
- ↑ Mulyono, Heri, Gunawan, Imam.2013 “Prototype Sistem Pendeteksi Gempa Untuk Rumah/Kantor Berbasis Mikrokontroler Menggunakan Sensor MMA7260Q” Jurnal Teknologi Informasi & Pendidikan Vol.6 No.2,2013 ( ISSN : 2086 – 4981)
- ↑ Suhardi, Diding.2014 “Prototipe Controller Lampu Penerangan LED (Light Emitting Diode) Independent Bertenaga Surya” Jurnal GAMMA (ISSN: 2086- 3071) Vol.10 NO.1, 2014 : 116-122
- ↑ 19,0 19,1 Githa, Putra Dwi, dkk.2014 “ Sistem Pengaman Parkir Dengan Visualisasi Jarak Menggunakan Sensor PING dan LCD” Jurnal Nasional Perndidikan Teknik Informatika (JANAPATI) ISSN 2089-8673 Vol.3, NO. 1,2014
- ↑ Heri Andriyanto dan Aan Darmawan.2016.Arduino Belajar Cepat dan Pemrograman.Bandung:Informatika Bandung
- ↑ Lestari dkk. 2016 “Sistem Informasi Geografis (SIG) Daerah Rawan Banjir Di Kota Bengkulu Menggunakan Arcview”. Jurnal Media Infotama, Vol. 12, No. 1 Febuari 2016.
- ↑ Rejeki. Setyo. Muslim, Tarmuji. Ali. 2013 “Membangun Aplikasi Autogenerate Script Ke Falowchart Untuk Business Proses Reengeneering”. Vol. 1, No. 2 Oktober 2013 E-ISSN : 2338-5197.
- ↑ 23,0 23,1 Silvia dkk. 2015. “Aplikasi Diagnosa Karies Pada Gigi Manusia Berbasis Web”. Ultimatics Vol.Vii No. 1 Juni 2015. ISSN : 2085-4552.
- ↑ Amrullah dkk, 2016. “Kajian Kebutuhan Perangkat Lunak Sistem Informasi Penilaian Prestasi Kerja Pegawai Pada Fakultas Abad Dan Ilmu Budaya Universitas Islam Negri Sunan Kalijaga Yogyakarta”. Seminar Nasional Teknologi Informasi Multimedia”. ISSN : 2302-3805.
- ↑ Andi, Prastomo. 2014. “Prototype Sistem Elearning Dengan Pendekatan Elisitasi Dan Frame Work Code Igniter : Studi Kasus SMP Yamad Bekasi. Faktor Exacta 7(2): 165-175, 2014. ISSN: 1979-276X.
- ↑ Asifa Indi, Nikitha Sukrithalal, Gayatri Babu, Jayshree Jha Pada Tahun 2017, Dari Dept. of IT., Atharva College of Engineering, Malad, Mumbai, India yang berjudul “SMART SYSTEM FOR GARBAGE MANAGEMENT” Penelitian ini membahas tentang tempat sampah untuk menentukan tingkat sampah di tempat sampah dengan sensor dan memberi tahu otoritas pengendali melalui modul komunikasi nirkabel. Tingkat sampah diawasi dengan GUI yang di bangun dengan aplikasi Android Lokasi. Tempat sampah di telusuri dengan sistem GPS yang digunakan. Sistem ini diperkenalkan untuk mengurangi waktu oprasional yang dibutuhkan untuk pemantauaan rutin tempat sampah”.
- ↑ D.Balaji, S.Meera, F.Arshya Banu, M.Priya, C.Shiny Sherlin, K.Sathyapriya Pada Tahun 2017, Dari Department of Electronic and Communication Engineering Mahendra College of Engineering. Salem, yang berjudul “SMART TRASH CAN USING INTERNET OF THINGS”. The aim of the project is to control the waste management system of Municipal by using Internet. Internet of Things (IoT) is the concept of basically connecting any device with an, on and off switch to the internet. This project connects the trashcan to the internet. It will update the status of the trashcan to the Municipal so that the garbage will be cleaned earlier to the overflow stage. This smart trashcan has three Infrared sensors which are used to find the level of the garbage in the trashcan. If the level reaches the threshold value, Raspberry pi model will send message to a mobile application as well as to an IoT cloud. In addition, the trashcan will have separate section for degradable and non-degradable wastes. The wastes which are thrown to the trashcan will fall on a plate. A capacitive is used to detect the degradable and non- degradable wastes. Initially the trashcan for non-degradable wastes is placed under the plate. If the public put the degradable wastes, a motor will rotate the trashcan for degradable waste under the plate. Then the waste will fall on the correct section. This project will help to improve the waste management system and it will help to change the city as smart city.
- ↑ Adil Bashir, Shoaib Amin Banday, Ab Rouf Khan, Muhammad Shafi Pada Tahun 2013, Dari Deptt. of Electric and Commuication Engineering, National Institute of Technology, Srinagar, J&K India dan Deptt. of Computer Science and Engineering, VIT University, Chennai, India, yang berjudul “CONCEPT, DESIGN AND IMPLEMENTATION OF AUTOMATIC WASTE MANAGEMENT SYSTEM”.One of the main concerns with our environment has been solid waste management which in addition to disturbing the balance of the environment also has adverse effects on the health of the society. The detection, monitoring and management of wastes is one of the primary problems of the present era. The traditional way of manually monitoring the wastes in waste bins is a complex, cumbersome process and utilizes more human effort, time and cost which is not compatible with the present day technologies in any way. This paper proposes an advanced method in which waste management is automated. Radio frequency identification (RFID) is one of the most promising and anticipated technologies in recent years. The system makes use of radio frequency (RF) tags and web support. This work presented here certainly provides a novel approach in handling and disposing off the day to day solid wastes in an efficient and easy way. The system consists of four main subsystems namely Smart Trash System (STS), Local Base Station (LBS), Smart Vehicle System (SVS) and Smart Monitoring and Controlling Hut (SMCH). The proposed system would be able to automate the solid waste monitoring process and management of the overall collection process. The technologies that would be used in the proposed system are good enough to ensure the practical and perfect for solid waste collection process monitoring and management for green environment.
- ↑ Emmanuel Atta Williams dan John Bentil, Pada Tahun 2016, Dari Department of Electical/Electronics Enginnering, Takoradi Polytechnic, Ghana dan Department of Civil Engineering, Takoradi Polytechnic, Ghana. Yang berjudul “DESIGN AND IMPLEMENTATION OF A MICROCONTROLLER – BASED AUTOMATIC WASTE MANAGEMENT SORTING UNIT FOR A RECYCLING PLANT”.</p>
The objectives of this study were to use microcontroller and sensors to automatically sort out organic and inorganic waste materials to be recycled. This is to reduce the time taken to sort out organic and inorganic waste materials manually and to save cost involved in processing waste. This study further described a sophisticated technique in sorting the waste based on the microcontroller unit that used gas sensors to separate the organic and raw wastes. The gas detection system was incorporated within the conveyer that passed in front of the gas sensor and sent data to controller through analog to digital convertor. The Microcontroller- based automatic waste management sorting unit for a recycling plant was successfully designed, built and this provided an efficient system for sorting out wastes into various components.</span> </li>
- ↑ Omar Longoria-Gandara, Francisco Sanchez-Garcia, Luis Enrique Gonzales-Jamienez, Pada Tahun 2015, Dari Jesuit University of Guadalajar, Department of Electronics, Systems and IT (ITESO), yang berjudul tentang “INTELLEGENT WASTE SEPARATOR”.Nowadays, trash has become a problem in the society and the ecosystem due to the way people get rid of it. Most of garbage is buried or burnt or even kept in places to which it does not belong. Big volumes of garbage thrown away and the methods used to store it cause air, water, and soil pollution. Fortunately, people can count on other methods to reduce the quantity of produced litter. An answer is recycling by re-using the materials. Currently, the traditional way to separate waste is to use different containers for each kind of waste separating trash manually, which does not always work. The aim of this paper is to present an Intelligent Waste Separator (IWS) which can replace the traditional way of dealing with waste; the proposed device receives the incoming waste and places it automatically in different containers by using a multimedia embedded processor, image processing, and machine learning in order to select and separate waste.
</ol>