BAB II<o:p></o:p>
LANDASAN TEORI<o:p></o:p>
2.1. Teori Umum<o:p></o:p>
2.1.1. Konsep Dasar Sistem<o:p></o:p>
1. Definisi Sistem<o:p></o:p>
MenurutDiana dan Setiawati (2011:3 ), “Sistem adalah serangkaian bagian yang saling tergantung danbekerjasama untuk mencapai tujuan tertentu”.<o:p></o:p>
Menurut Sutabri (2012:10),“Secara sederhana suatu sistem dapat diartikan sebagai suatu kumpulan atauhimpunan dari unsur, komponen, atau variabel yang terorganisir, salingberinteraksi, saling tergantung satu sama lain, dan terpadu”.<o:p></o:p>
Berdasarkan beberapa definisisistem yang dikemukakan di atas dapat ditarik kesimpulan bahwa sistem adalah serangkaian atau kumpulan dan himpunan darisunsur, kompomen atau variabel yang terorganisir, saling berinteraksi, yangsaling tergantung satu sama lain untuk mencapai tujuan tertentu.
2. Karakteristik Sistem<o:p></o:p>
Menurut Sutabri (2012:22), sistem merupakan suatu bentuk integrasi antarasatu komponen dengan komponen lainnya karena sistem memiliki sasaran yangberbeda untuk setiap kasus yang terjadi yang ada di dalam sistem tersebut. Olehkarena itu, sistem dapat diklasifikasikan dari beberapa sudut pandang,diantaranya:<o:p></o:p>
a. Sistem Abstrak dan Sistem Fisik <o:p></o:p>
Sistem abstak adalahsistem yang berupa pemikiran atau ide-ide yang tidak tampak secara fisik,misalnya sistem teologia, yaitusistem yang berupa pemikiran hubungan antara manusia dengan Tuhan, sedangkansistem fisik merupakan sistem yang ada secara fisik, misalnya sistem komputer,sistem produksi, sistem penjualan, sistem administrasi personalia, dan lainsebagainya.<o:p></o:p>
b. Sistem Alamiah dan Sistem Buatan Manusia<o:p></o:p>
Sistem alamiah adalahsistem yang terjadi melalui proses alam, tidak dibuat oleh manusia, misalnyasistem perputaran bumi, terjadinya siang malam, dan pergantian musim.Sedangkan sistem buatan manusia merupakan sistem yang melibatkan interaksimanusia dengan mesin yang disebut humanmachine sistem. Sistem informasiberbasis komputer merupakan contoh humanmachine sistem karena menyangkutpenggunaan komputer yang berinteraksi dengan manusia.<o:p></o:p>
c. Sistem Determinasi dan Sistem Probabilistik<o:p></o:p>
Sistem yang berinterkasidengan tingkah laku yang dapat diprediksi disebut sistem deterministic. Sistem komputer adalah contoh dari sistem yangtingkah lakunya dapat dipastikan berdasarkan program-program komputer yangdijalankan. Sedangkan sistem yang bersifat probabilistikadalah sistem yang kondisi masa depannya tidak dapat diprediksi karenamengandung unsur probabilistic.<o:p></o:p>
d. Sistem Terbuka dan Sistem Tertutup<o:p></o:p>
Sistem tertutupmerupakan sistem yang tidak berhubungan dan tidak terpengaruh oleh lingkunagnluarnya. Sistem ini bekerja secara otomatis tanpa campur tangan pihak luar. Sedangkansistem tebuka adalah sistem yang berhubungan dan dipengaruhi oleh lingkunganluarnya. Sistem ini menerima masukan dan menghasilkan keluaran untuk subsistemlainnya.<o:p></o:p>
2.1.2. Klasifikasi Sistem<o:p></o:p>
Menurut Sutabri (2012:22), sistem merupakan suatu bentuk integrasi antarasatu komponen dengan komponen lainnya karena sistem memiliki sasaran yangberbeda untuk setiap kasus yang terjadi yang ada di dalam sistem tersebut. Olehkarena itu, sistem dapat diklasifikasikan dari beberapa sudut pandang,diantaranya:<o:p></o:p>
1. Sistem Abstrak dan Sistem Fisik <o:p></o:p>
Sistem abstak adalah sistem yang berupa pemikiran atau ide-ide yang tidaktampak secara fisik, misalnya sistem teologia,yaitu sistem yang berupa pemikiran hubungan antara manusia dengan Tuhan,sedangkan sistem fisik merupakan sistem yang ada secara fisik, misalnya sistemkomputer, sistem produksi, sistem penjualan, sistem administrasi personalia,dan lain sebagainya.<o:p></o:p>
2. Sistem Alamiah danSistem Buatan Manusia<o:p></o:p>
Sistem alamiah adalah sistem yang terjadi melalui proses alam, tidak dibuatoleh manusia, misalnya sistem perputaran bumi, terjadinya siang malam,danpergantian musim. Sedangkan sistem buatn manusia merupakan sistem yang melibatkaninteraksi manusia dengan mesin yang disebut human machine sistem. Sistem informasi berbasis komputer merupakan contohhuman machine sistem karena menyangkutpenggunaan komputer yang berinteraksi dengan manusia.<o:p></o:p>
3. Sistem Determinasi dan Sistem Probabilistik<o:p></o:p>
Sistem yang berinterkasi dengan tingkah laku yang dapat diprediksi disebutsistem deterministic. Sistem komputeradalah contoh dari sistem yang tingkah lakunya dapat dipastikan berdasarkanprogram-program komputer yang dijalankan. Sedangkan sistem yang bersifat probabilistik adalah sistem yang kondisimasa depannya tidak dapat diprediksi karena mengandung unsur probabilistic.<o:p></o:p>
4. Sistem Terbuka danSistem Tertutup<o:p></o:p>
Sistemtertutup merupakan sistem yang tidak berhubungan dan tidak terpengaruh olehlingkunagn luarnya. Sistem ini bekerja secara otomatis tanpa campur tanganpihak luar. Sedangkan sistem tebuka adalah sistem yang berhubungan dandipengaruhi oleh lingkungan luarnya. Sistem ini menerima masukan danmenghasilkan keluaran untuk subsistem lainnya. <o:p></o:p>
2.1.3. Konsep Dasar Perancangan<o:p></o:p>
1. Definisi Perancangan<o:p></o:p>
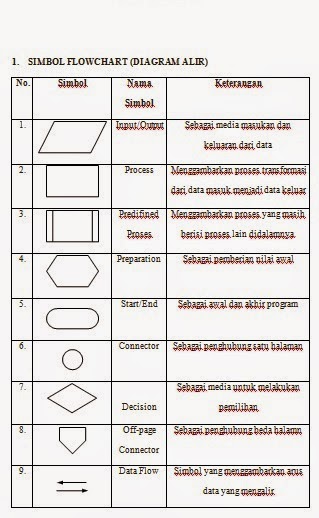
Menurut Sulindawati dan Muhammad Fathoni di dalam Jurnal SAINTIKOMVol. 9, No. 2 (2010:8), “Flowchart adalah penggambaran secara grafik darilangkah-langkah dau urutan-urutan prosedur dari suatu program”.
Menurut Adelia dan Jimmy Setiawan di dalam Jurnal SistemInformasi Vol.6, No.2 (2011:116), “Flowchart adalah penggambaran secara grafik darilangkah-langkah dan urut-urutan prosedur dari suatu program”.
Dari pendapat yang dikemukakan di atas dapat disimpulkan bahwa flowchart adalah bentuk gambar/diagram yang mempunyaialiran satu atau dua arah secara sekuensial.
Flowchartbiasanya mempermudah penyelesaian suatu masalah khususnya masalah yang perludipelajari dan dievaluasi lebih lanjut. Bila seorang analisi dan programmerakan membuat flowchart, ada beberapa petunjuk yang harus diperhatikan<o:p></o:p>
2. Cara Membuat Flowchart<o:p></o:p>
Ada beberapapetunjuk dalam pembuatan Flowchart Menurut Menurut Sulindawati dan MuhammadFathoni dalam Jurnal SAINTIKOM Vol. 9, No. 2 (2010:8):<o:p></o:p>
a. Flowchartdigambarkan dari halaman atas ke bawah dan kiri ke kanan.<o:p></o:p>
b. Aktifitas yangdigambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapatdimengerti oleh pembacanya.<o:p></o:p>
c. Kapan aktifitasdimulai dan berakhir harus ditentukan secara jelas<o:p></o:p>
d. Setiap langkahdari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.<o:p></o:p>
e. Setiap langkahdari aktifitas harus berada pada urutan yang benar.<o:p></o:p>
f. Lingkup danrange dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.<o:p></o:p>
g. Gunakan simbol-simbolflowchart yang standart.<o:p></o:p>
3. Jenis-Jenis Flowchart<o:p></o:p>
Ada lima macam bagan aliryang akan dibahas di modul ini, yaitu sebagai berikut:
a. Bagan Alir Sistem (System Flowchart)
Merupakan bagan yang menunjukkan alur kerja atau apa yang sedangdikerjakan di dalam sistem secara keseluruhan dan menjelaskan urutan dariprosedur-prosedur yang ada dalam sistem.<o:p></o:p>
Gambar 2.1Bagan Alir Sistem (SystemFlowcharts)
b. Bagan Alir Dokumen (Document Flowchart)
Menelusuri alur dari data yang ditulis melaluisistem. Fungsi utamanya untuk menelusuri alur form dan laporan sistem dari satubagian ke bagian yang lain.<o:p></o:p>
![Purchasing_&_Procurement_Process_Flowchart_L]() <o:p></o:p>
<o:p></o:p>Gambar 2.2 BaganAlir Dokumen (Document Flowchart)<o:p></o:p>
c. Bagan Alir Skematik (Schematic Flowchart)
Mirip dengan flowchart sistem yang menggambarkan suatu sistem atau prosedur.
![1471-2105-9-57-4-l]() <o:p></o:p>
<o:p></o:p>Gambar2.3 Bagan Alir Skematik (Schematic Flowchart)<o:p></o:p>
d. Bagan Alir Program (Program Flowchart)
Merupakan keterangan yang lebih rinci tentang bagaimana setiaplangkah program atau prosedur dilaksanakan.<o:p></o:p>
![cdowhileflowchart116]() <o:p></o:p>
<o:p></o:p>Gambar2.4 Bagan Alir Program ( Program Flowchart )<o:p></o:p>
e. Bagan Alir Proses (Process Flowchart)
Merupakan teknik penggambaran rekayasa industrial yang memecah danmenganalisis langkah selanjutnya dari sebuah sistem.
![]() <o:p></o:p>
<o:p></o:p> Gambar 2.5Bagan Alir Proses (ProcessFlowchart)<o:p></o:p>
![flowchart]() <o:p></o:p>
<o:p></o:p> Gambar2.6 Contoh Variasi Aplikasi Flowchart<o:p></o:p>
2.1.4. KonsepDasar Prototype<o:p></o:p>
1. Definisi Prototype<o:p></o:p>
Menurut Simarmata (2010:64),” Prototype adalah perubahan cepat di dalam perancangandan pembangunan prototype.<o:p></o:p>
Menurut Wiyancoko (2010:120),”Prototype adalah model produk yang mewakili hasilproduksi yang sebenarnya”. Daripendapat yang dikemukakan di atas dapat disimpulkan bahwa prototype adalah proses pembuatan model produk dalam perancangan.<o:p></o:p>
A. Prototype Jenis I<o:p></o:p>
Prototype jenis I sesungguhnya akan menjadi sistemoperasional. Pendekatan ini hanya mungkin jika peralatan prototypingmemungkinkan prototipe memuat semua elemen penting dari sistem baru. Langkah-langkah pengembangan prototype jenis I adalah sebagai berikut:<o:p></o:p>
1. Mengidentifikasi kebutuhanpemakai.
2. Mengembangkan prototype.
3. Menentukan apakah prototype dapat diterima.
4. Menggunakan prototype.
B. Prototype Jenis II
Prototype jenis II merupakan suatu model yang dapatdibuang yang berfungsi sebagai alat cetak biru bagi sistem operasional. Pendekatan inidilakukan jika prototype tersebut hanya dimaksudkan untuk tampilanseperti sistem operasional dan tidak dimaksudkan untuk memuat semua elemenpenting. Tiga langkah pertama dalam pengembangan prototype jenis II sama seperti untuk prototype jenis I. Langkah-langkah selanjutnya adalahsebagai berikut: <o:p></o:p>
1. Mengkodekan sistem operasional.<o:p></o:p>
2. Menguji sistem operasional.<o:p></o:p>
3. Menentukan jika sistem operasional dapat diterima.<o:p></o:p>
4. Menggunakan sistem operasional.<o:p></o:p>
![]() <o:p></o:p>
<o:p></o:p>Gambar 2.7 Metode Prototype<o:p></o:p>
Sumber: Sulindawati dan MuhammadFathoni di dalam Jurnal SAINTIKOM (2010:8)<o:p></o:p>
Menurut Sasankar dan Vijay Chavan di dalam jurnal InternationalJournal of Computer Science & Technology (2012:195), Terdapat tiga pendekatanutama prototyping, yaitu:<o:p></o:p>
1. THROW-AWAY<o:p></o:p>
Prototype dibuat dandites. Pengalaman yang diperoleh dari pembuatan prototype digunakan untukmembuat produk akhir (final), kemudian prototypetersebut dibuang (tak dipakai).
2. INCREMENTAL
Produkfinalnya dibuat sebagai komponen-komponen yang terpisah. Desain produk finalnyasecara keseluruhan haya ada satu tetapi dibagi dalam komonen-komponen lebihkecil yang terpisah (independent).
3. EVOLUTIONARY
Padametode ini, prototypenya tidak dibuang tetapi digunakanuntuk iterasi desain berikutnya. Dalam hal ini, sistem atau produk yangsebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatasmenuju produk final atau produk akhir.<o:p></o:p>
2. Kelebihan dan Kelemahan Prototype <o:p></o:p>
Kelebihan dan kelemahan prototypingadalah sebagai berikut:<o:p></o:p>
<tbody> | Keunggulan<o:p></o:p> | Kekurangan<o:p></o:p> |
| a. Adanya komunikasi yang baik antara pengembang dan user.<o:p></o:p> b. Pengembang dapat bekerja lebih baik dalam menentukan kebutuhan user.<o:p></o:p> c. User berperan aktif dalam pengembangan sistem.<o:p></o:p> d. Lebih menghemat waktu dalam pengembangan sistem.<o:p></o:p> e. Penerapan menjadi lebih mudah karena pemakai mengetahui apa yang diharapkannya<o:p></o:p> | a. User kadang tidak melihat atau menyadari bahwa perangkat lunak yang ada belum mencantumkan kualitas perangkat lunak secara keseluruhan dan juga belum memikirkan kemampuan pemeliharaan untuk jangka waktu lama. b. Pengembang biasanya ingin cepat menyelesaikan proyek. Sehingga menggunakan algoritma dan bahasa pemrograman yang sederhana untuk membuat prototyping lebih cepat selesai tanpa memikirkan lebih lanjut bahwa program tersebut hanya merupakan cetak biru sistem. c. Hubungan user dengan komputer yang disediakan mungkin tidak mencerminkan teknik perancangan yang baik. |
</tbody>
Tabel 2.1 Kelebihan dan Kekurangan Prototype<o:p></o:p>
2.1.5. Konsep Dasar Pengontrolan<o:p></o:p>
1. Definisi Pengontrolan<o:p></o:p>
MenurutErinofiardi (2012:261), “Suatusystem control otomatis dalam suatu proses kerja berfungsi mengendalikan prosestampa adanya campur tangan manusia (otomatis)”.
Kontrol otomatis mempenyai peran pentingdalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmupengetahuan dan teknologi, sistem kontrol otomatis telah mendorong manusiauntuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengancara yang lebih mudah, efisien dan efektif. Adanya kontrol otomatis secaratidak langsung dapat menggantikan peran manusia dalam meringankan segalaaktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD)pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan,pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukantenaga ahli perencanaan sistem pengendali dan perancangan desain sistempengendali, termasuk teknisi profesional sebagai operator. Tidak menutup kemungkinanbahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungankarena teori sistem pengendali modern dikembangkan guna mengatasi kerumitanyang dijumpai pada berbagai system pengendalian yang menuntut kecepatan danketelitian yang tinggi dengan hasil output yang optimal.<o:p></o:p>
Dalam sistempengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan SistemPengendali Loop Tertutup ( Closed-loopControl System ).<o:p></o:p>
2. Jenis – Jenis Pengontrolan
a. Sistem Kontrol Loop Terbuka<o:p></o:p>
Menurut Erinofiardi (2012:261)sistem kontrol loop terbuka adalah ”suatu sistem kontrol yang keluarannya tidakberpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrolini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian.”<o:p></o:p>
Gambar2.8. Sistem pengendali loop terbuka<o:p></o:p>
Sumber :Erinofiardi (2012:261)
Gambar diagram blok diatasmenggambarkan bahwa didalam
sistem tersebut tidak ada proses umpan balik untukmemperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas darielemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya kealat terkendali.
b. SistemKontrol Loop Tertutup<o:p></o:p>
Menurut Erinofiardi (2012:261) sistem kontrol loop tertutup
adalah“Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsungterhadap aksi pengendalian yang dilakukan.”
Yang menjadi ciri dari sistempengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balikmerupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yangdiumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaransistem mendekati hasil yang diinginkan.<o:p></o:p>
Gambar 2.9. Sistem pengendali loop tertutup<o:p></o:p>
Sumber :Erinofiardi (2012:261)
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatuloop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpanbalik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan kedalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yangakan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatunilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagaisistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.<o:p></o:p>
2.2. Teori Khusus<o:p></o:p>
2.2.1. Mikrokontroller <o:p></o:p>
1. Definisi Mikrokontroler<o:p></o:p>
Menurut Sumardi (2013:1), “Mikrokontrolermerupakan suatu alat
elektronika digital yang mempunyai masukandan keluaran serta kendali
dengan program yang bisa ditulis dan dihapus dengan cara khusus, carakerja mikrokontroler sebenarnya membaca dan menulis data”. Dari beberapadefinisi-definisi diatas dapat disimpulkan bahwa Mikrokontroler adalah sebuahsistem mikroprosesor dalam chip tunggal yang dimana didalamnya terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya, dan juga mempunyaimasukan dan keluaran serta kendali yang difungsikan untuk membaca data, dan denganprogram yang bisa ditulis dan dihapus dengan cara khusus.
2. KarakteristikMikrokontroler<o:p></o:p>
Menurut Sumardi (2013:2), mikrokontrolermemiliki karakteristik
sebagai berikut :
a. Memiliki program khusus yang disimpan dalam memori untuk aplikasi
tertentu, tidak seperti PCyang multifungsi karena mudahnya memasukkan program. Program mikrokontrolerrelatif lebih kecil daripada program-program pada PC.
b. Konsumsi daya kecil.
c. Rangkaiannya sederhana dan kompak.
d. Harganya murah , karena komponennya sedikit.
e. Unit I/O yang sederhana, misalnya LCD, LED, Latch.
f. Lebih tahan terhadap kondisi lingkunganekstrim, misalnya temperature tekanan,kelembaban, dan sebagainya.
b. Klasifikasi Mikrokontroler<o:p></o:p>
Menurut Malik dan Mohammad Unggul Juwana(2009:3), Mikrokontroler memiliki beberapa klasifikasi yaitu sebagai berikut:<o:p></o:p>
1. ROM (Flash Memory) dengan kapasitas 1024 byte (1 KB).<o:p></o:p>
2. RAM berkapasitas 68 byte.<o:p></o:p>
3. EEPROM (memori data)berkapasitas 64 byte.<o:p></o:p>
4. Total 13 jalur I/O (PortB 8 bit).<o:p></o:p>
5. Timer/Counter 8 bit dengan prescaler.<o:p></o:p>
6. Fasilitas pemrograman didalam sistem (ICSP = In Circuit Serial Programming).<o:p></o:p>
3. Fitur-fitur Mikrokontroler<o:p></o:p>
Menurut Malik dan Mohammad Unggul Juwana(2009:3), ada beberapa fitur yang pada umumnya ada di dalam mikrokontroleradalah sebagai berikut :<o:p></o:p>
a. RAM (Random Access Memory)<o:p></o:p>
RAMdigunakan oleh mikrokontroler untuk tempat penyimpanan variable. Memori ini bersifat volatileyang artinya akan kehilangan semua datanya jika tidak mendapatkan catu daya.<o:p></o:p>
b. ROM (Read Only Memory)<o:p></o:p>
ROM disebut sebagaikode memori karena berfungsi untuk tempat penyimpanan program yang akandiberikan oleh user.<o:p></o:p>
c. Register.<o:p></o:p>
Register merupakan tempatpenyimpanan nilai-nilai yang akan digunakan dalam proses yang telah disediakanoleh mikrokontroler.<o:p></o:p>
d. Special Function Register.<o:p></o:p>
Merupakan register khusus yang berfungsi untukmengatur jalannya mikrokontroler dan register ini terletak di RAM.<o:p></o:p>
e. Input dan Output Pin.<o:p></o:p>
Pin Input adalah bagian yangberfungsi sebagai penerima signal dariluar dan pin ini dihubungkan ke berbagai media inputan seperti keypad,sensor, keyboard, dan sebagainya. Pin Output adalah bagian yang berfungsiuntuk mengeluarkan signal dari hasil proses algoritma mikrokontroler.<o:p></o:p>
f. Interrupt.<o:p></o:p>
Interrupt merupakan bagian darimikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi,sehingga ketika program sedang dijalankan, program tersebut dapatdiinterupsikan dan menjalankan program interupsi terlebih dahulu.<o:p></o:p>
Menurut Malik dan Mohammad Unggul Juwana(2009:3), ada beberapa interrupt yangterdapat pada mikrokontroler adalah sebagai beriku:<o:p></o:p>
1. Interrupt Eksternal.<o:p></o:p>
Interrupt ini akan terjadi ketika adainputan dari pin interrupt.<o:p></o:p>
2. Interrupt Timer.<o:p></o:p>
Interruptini akan terjadi ketika waktu tertentu telah tercapai.<o:p></o:p>
3. InterruptSerial.<o:p></o:p>
Interruptini akan terjadi ketika ada penerimaan data dari komunikasi serial.<o:p></o:p>
2.2.2. Mikrokontroller ATmega328<o:p></o:p>
1. Arsitektur Mikrokontroller ATmega328<o:p></o:p>
Sebagai salah satu vendor besar didunia ini, ATMEL mengeluarkanATmega328 yang merupakan salah satu mikrokontroler yang banyak digunakan.Mikrokontroler ATmega328 memiliki kompatibilitas penuh dengan keluarga MCS-51lain, terutama pada bagian pemrogramannya dan mampu diprogram secara InSystem Programming (ISP).<o:p></o:p>
Mikrokontroler ATmega328 memiliki beberapakriteria standard yaitu memiliki 32KB Flash Programmable dan 1 KB EEPROM yang dapat diprogram ulangsekitar 1000 kali write atau erase cycle, 2 KB SRAM, 14 jalur I/O, 6pin analog, dua buah 16 bit timer/counter,dengan arsitektur lima vector, empat-level interrupt, full duplex serialport, on-chip oscillator dan onchiptimer/counter.<o:p></o:p>
Mikrokontroler ATmega328 beroperasi pada frekuensi clock sampai 16 Mhz. ATmega328 memilikidua Power Saving Mode yang dapatdikontrol melalui software, yaitu Idle Mode dan Power Down Mode. Pada IdleMode, CPU tidak aktif sedangkan isi RAM tetap dipertahankan dengan timer/counter, serial port dan interruptsystem tetap berfungsi. Pada PowerDown Mode, isi RAM akan disimpan tetapi osilatornya tidak akan berfungsisehingga semua fungsi dari chip akanberhenti sampai mendapat reset secarahardware.<o:p></o:p>
2. Konfigurasi Pin ATmega328<o:p></o:p>
Mikrokontroller merupakansebuah processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyaibentuk yang jauh lebih kecil dari suatu komputer pribadi dan computermainframe, mikrokontroller dibangun dari elemen – elemen dasar yang sama.Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakaninstruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting danutama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuatoleh seorang programmer.
Program ini menginstruksikankomputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer konfigurasi pin ATmega328dapat dilihat pada gambar berikut:
![]() <o:p></o:p>
<o:p></o:p> Gambar 2.10. Konfigurasi pin ATmega328<o:p></o:p>
Beberapafitur yang umumnya ada di dalam mikrokontroller adalah sebagai berikut : <o:p></o:p>
1. RAM( Random Access Memory )
RAMdigunakan oleh mikrokontroller untuk tempat penyimpanan variable. Memori ini bersifat volatile yangberarti akan kehilangan semua datanya jika tidak mendapatkan catu daya. <o:p></o:p>
2. ROM( Read Only Memory )
ROMseringkali disebut sebagai kode memori karena berfungsi untuk tempatpenyimpanan program yang akan diberikan oleh user.
2. Register Merupakan tempatpenyimpanan nilai – nilai yang akan digunakan dalam proses yang telahdisediakan oleh mikrokontroller
3. Special Function Register Merupakan register khusus yang berfungsi untukmengatur jalannya mikrokontroller. Registerini terletak pada RAM.
4. Input dan Output Pin
Pin input adalah bagianyang berfungsi sebagai penerima signal dariluar, pin ini dapat dihubungkan keberbagai media inputan seperti keypad,sensor, dan sebagainya. Pin outputadalah bagian yang berfungsi untuk mengeluarkan signal dari hasil prosesalgoritma mikrokontroller.
5. Interrupt merupakan bagian dari mikrokontroller yang berfungsi sebagai bagianyang dapat melakukan interupsi, sehingga ketika program utama sedang berjalan,program utama tersebut dapat diinterupsi dan menjalankan program interupsiterlebih dahulu.
6. Beberapa interrupt pada umumnya adalah sebagai berikut : ¾ InterruptEksternal.
a. Interrupt akan terjadi bila adainputan dari pin interrupt ¾ Interrupt timer.
b. Interrupt akan terjadi bilawaktu tertentu telah tercapai ¾ Interrupt serial.
c. Interupt yang terjadi ketikaada penerimaan data dari komunikasi serial.
3. Fitur Mikrokontroller ATmega328
ATmega328 adalahmikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC ( Reduce Instruction Set Computer) yangdimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC ( Completed Instruction Set Computer).
a. Mikrokontroller ini memiliki beberapa fiturantara lain :
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPSdengan clock 16 MHz.
4. 32 KB Flash memory dan padaarduino memiliki bootloader yangmenggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM( Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan datameskipun catu daya dimatikan.
6. Memiliki SRAM ( Static Random AccessMemory) sebesar 2KB.
7. Memiliki pin I/O digitalsebanyak 14 pin 6 diantaranya PWM ( Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
b. Mikrokontroller ATmega328memiliki arsitektur Harvard
Yaitu memisahkan memori untuk kode programdan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism.
1. Instruksi– instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satuinstruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalamsetiap satu siklus clock.
2. 32 x8-bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapatdilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakansebagai 3 buah register pointer 16-bit pada mode pengalamatan tak langsunguntuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit inidisebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28dan R29 ), dan register Z ( gabungan R30 dan R31 ).
3. Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamatmemori program terdiri dari instruksi 16-bit atau 32-bit. Selainregister serba guna di atas, terdapat register lain yang terpetakan denganteknik memory mapped I/O selebar 64 byte. Beberapa register inidigunakan untuk fungsi khusus antara lain sebagai register control Timer/Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register –register ini menempati memori pada alamat 0x20h – 0x5Fh. <o:p></o:p>
Untuk mengetahui alur hubungan dari architecture ATmega328 dapat di lihat pada gambar berikut:
![]() <o:p></o:p>
<o:p></o:p>Gambar 2.11. ArsitekturATmega328<o:p></o:p>
c. Memori<o:p></o:p>
ATmega328 mempunyai 32 KB (dengan0,5 KB digunakan untuk bootloader.ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM (yang dapat dibaca danditulis (RW/read and written)dengan <a href="http://www.arduino.cc/en/Reference/EEPROM">EEPROM library</a>).<o:p></o:p> d. Input dan Output<o:p></o:p>
Beberapa pin mempunyaifungsi-fungsi spesial:<o:p></o:p>
1. Serial: 0 (RX) dan 1(TX). Digunakanuntuk menerima (RX) dan memancarkan (TX) serial data TTL (Transistor-TransistorLogic). Kedua pin ini dihubungkan ke pin-pinyang sesuai dari chip Serial ATmega8U2USB-ke-TTL.<o:p></o:p>
2. External Interrupts: 2 dan3. Pin-pin ini dapat dikonfigurasikan untukdipicu sebuah interrupt (gangguan)pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatuperubahan nilai. Lihat fungsi <a href="http://arduino.cc/en/Reference/AttachInterrupt">attachInterrupt()</a> untuklebih jelasnya.<o:p></o:p> 5. LED: 13. Ada sebuah LED yang terpasang,terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.<o:p></o:p>
ATmega328 mempunyai 6 inputanalog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi(contohnya 1024 nilai yang berbeda). Secara default, 6 input analog tersebutmengukur dari ground sampai tegangan5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya denganmenggunakan pin AREF dan fungsi <a href="http://arduino.cc/en/Reference/AnalogReference">analogReference()</a>.Di sisi lain, beberapa pin mempunyai fungsi spesial: b. Ada sepasang pin lainnya pada board:<o:p></o:p>
d. Reset. Membawa saluran ini LOWuntuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuahtombol reset untuk melindungi yang memblocksesuatu pada board.<o:p></o:p>
e. ATmega328 menyediakan serial komunikasi UART TTL (5V), yang tersediapada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 pada channel board serial komunikasinyamelalui USB dan muncul sebagai sebuah portvirtual ke software padakomputer. Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan.Bagaimanapun, <a href="http://arduino.cc/en/Guide/Windows#toc4">padaWindows, sebuah file inf pasti dibutuhkan</a>. Software Arduino mencakup sebuah serial monitor yang memungkinkan data tekstual terkirim ke dan dariboard Arduino. LED RX dan TX pada board akan menyala ketika data sedangditransmit melalui chip USB-to-serialdan koneksi USB pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1). g. ATmega328 juga mensupport komunikasi I2C (TWI) dan SPI. SoftwareArduino mencakup sebuah Wire libraryuntuk memudahkan menggunakan bus I2C, Untuk komunikasi SPI, gunakan <a href="http://arduino.cc/en/Reference/SPI">SPI library</a>. ATmega328 Memerlukan Board Arduino Uno Sebagai bootloaderyang memungkinkan kita untuk menguploadkode baru ke ATmega328 menggunakan pemrogram hardware eksternal yaitu Board ArduinoUno. ATmega328 berkomunikasi menggunakan protokol STK500. 2.2.3. Mikrokontroller Arduino Uno<o:p></o:p>
1. Definisi Arduino Uno<o:p></o:p>
Menurut Sulaiman (2012:1), arduino merupakan platform yangterdiri dari software dan hardware. Hardware Arduino sama dengan mikrocontroller pada umumnya hanyapada arduino ditambahkan penamaan pin agar mudah diingat. Software Arduino merupakan softwareopen source sehingga dapatdi download secara gratis. Softwareini digunakan untuk membuat dan memasukkan program ke dalam Arduino.Pemrograman Arduino tidak sebanyak tahapan mikrocontroller konvensional karenaArduino sudah didesain mudah untuk dipelajari, sehingga para pemula dapat mulaibelajar mikrocontroller dengan Arduino.<o:p></o:p>
Menurut Santosa (2012:1), <a href="http://www.indorobotika.com/arduino" title="Arduino">arduino</a>adalah kit elektronik atau papanrangkaian elektronik open source yangdi dalamnya terdapat komponen utama yaitu sebuah chip <a href="http://www.indorobotika.com/" target="_blank" title="mikrokontroler">mikrokontroler</a> dengan jenis AVR dari perusahaanAtmel. Berdasarkan dua definisi yang dikemukakan diatas dapat disimpulkanbahwa arduino merupakan kitelektronik atau papan rangkaian elektronik yang didalamnya terdapat komponenutama yaitu sebuah chipmikrokontroler dengan jenis AVR dari perusahaan Atmel serta sofware pemrograman yang berlisensi open source.<o:p></o:p>
2. HardwareArduino Uno<o:p></o:p>
Menurut Sulaiman (2012:1) Arduinomerupakan platform open source baik secara hardware dan software.Arduino terdiri dari mikrocontroller megaAVR seperti ATmega8, ATmega168,ATmega328, ATmega1280, dan ATmega 2560 dengan menggunakan Kristal osilator 16MHz, namun ada beberapa tipe Arduino yang menggunakan Kristal osilator 8 MHz.Catu daya yang dibutuhkan untuk mensupply minimum sistem Arduino cukup dengantegangan 5 VDC. Port arduino Atmega series terdiri dari 20 pin yang meliputi 14pin I/O digital dengan 6 pin dapat berfungsi sebagai output PWM (Pulse WidthModulation) dan 6 pin I/O analog. Kelebihan Arduino adalah tidakmembutuhkan flash programmer external karena di dalam chip microcontrollerArduino telah diisi dengan bootloader yang membuat proses uploadmenjadi lebih sederhana. Untuk koneksi terhadap komputer dapat menggunakanRS232 to TTL Converter ataumenggunakan Chip USB ke Serial converterseperti FTDI FT232.
Gambar 2.12. Papan Arduino USB Standar<o:p></o:p>
Sumber : Djuandi(2011:5)<o:p></o:p>
Arduino board sendiri telah tersedia dalam banyak jenis baik yangsudah berkoneksi USB maupun serial. Contoh Arduino yang terkoneksi dengan USBseperti: Arduino Uno, Arduino Duemilanove, Arduino Diecimila, Arduino NG Rev. C, Arduino FIO, dan Arduino lilypad. Untuk lilypad memiliki ukuran sebesarkancing baju dan anti air sehingga dapat dicuci. Sedangkan Arduino Severinomerupakan contoh untuk yang terkoneksi secara serial. Untuk para pemulayang bingung memiliih jenis boardyang cocok, dapat memilih Arduino Duemilanoveatau Arduino UNO karena keduajenis ini yang paling banyak digunakan. Namun jika ingin berkreasi lebihmaka dapat membuat board sendiridengan menyesuaikan kebutuhan dan dana yang ada. Selain Arduino board, juga terdapat perangkat tambahanyang disebut shield untuk pengembangan Arduino. Dengan shield ini maka tidak perlu lagi repotmenyolder karena semua sudah didesain sesuai dengan pin arduino. Contohshield seperti : Ethernet shield untuk mengkoneksikan arduino denganLAN, Xbee untuk memungkinkan beberapa arduino berkomunikasi secara wireless. <o:p></o:p>
![]()
Gambar 2.13. ArduinoUSB
Sumber : (Djuandi 2011:5)
3. Sofware Arduino Uno<o:p></o:p>
Menurut Sulaiman (2012:1) arduino diciptakan untuk para pemulabahkan yang tidak memiliki basic bahasa pemrograman sama sekali karenamenggunakan bahasa C++ yang telah dipermudah melalui library. Arduino menggunakan Software Processing yangdigunakan untuk menulis program kedalam Arduino. Processing sendiri merupakanpenggabungan antara bahasa C++ dan Java. SoftwareArduino ini dapat di-install di berbagai operating system (OS) seperti: LINUX, Mac OS, Windows. Software IDEArduino terdiri dari 3 (tiga) bagian:
1. Editor program, untuk menulisdan mengedit program dalam bahasa processing. Listing program padaArduino disebut sketch.
2. Compiler, modul yang berfungsi mengubah bahasa processing (kode program) kedalam kode biner karena kode bineradalah satu–satunya bahasa program yang dipahami oleh mikrokontroler.
3. Uploader, modul yang berfungsi memasukkan kode biner kedalam memori mikrokontroler.
![http://thingm.com/fileadmin/thingm/images/photos/tm_blinkm_arduino_env.png]() Struktur perintahpada arduino secara garis besar terdiri dari 2 (dua) bagian yaitu void setupdan void loop. Void setupberisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkansedangkan void loop berisi perintahyang akan dieksekusi berulang-ulang selama arduino dinyalakan.
Struktur perintahpada arduino secara garis besar terdiri dari 2 (dua) bagian yaitu void setupdan void loop. Void setupberisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkansedangkan void loop berisi perintahyang akan dieksekusi berulang-ulang selama arduino dinyalakan.
<o:p>
</o:p>
<o:p>
</o:p>
<o:p>
</o:p>
Gambar 2.14.Arduino Software<o:p></o:p>
2.2.4. VisualBasic.NET
VB.NET adalah salah satu bahasa pemrograman Komputer TingkatTinggi. Bahasa Pemrograman Adalah Perintah-perintah yang dimengerti oleh computer untuk melakukantugas-tugas tertentu Bahasa pemrograman VB.NET dikembangkanoleh Microsoft , MerupakanSalah Satu bahasa Pemrograman Yang Object Oriented Programming(OOP) atau Pemrograman yang berorientasi Pada Object.Kata “Visual” menunjukkancara yang digunakan untuk membuat Graphical User Interface(GUI). Dengan Cara ini, kita tidak perlulagi menuliskan instruksi pemrograman dalam kode-kodebaris hanya untuk membuat sebuah Desaign Form/Aplikasi.Tetapi dengan sangat mudah yakni kitacukup melakukan Drag and drop object-objectyang akan kita gunakan. VB.Net dapat kita jadikanalat Bantu untuk membuat berbagai macam program komputer. Aplikasi VB.NET hanya dapatdijalankan pada system OperasiWindows.
1. Pemanfaat Aplikasi Visual Basic.NET<o:p></o:p>
Aplikasi yang dapat dihasilkandengan bahasa pemrograman VB.NET antara lain : <o:p></o:p>
· Sistem Aplikasi Bisnis<o:p></o:p>
· Software Aplikasi SMS <o:p></o:p>
· Software Aplikasi <o:p></o:p>
· Chatting <o:p></o:p>
· Permainan (Game) danLain-lain<o:p></o:p>
![]() <o:p></o:p>
<o:p></o:p> Gambar 2.15. Gambar Tampilan Jendela UtamaVisual Baic.NET<o:p></o:p>
· Menu Bar<o:p></o:p>
Berisi Menu-menu yang masing-masing menu memiliki fungsi tersendiri.<o:p></o:p>
· ToolBar<o:p></o:p>
Tombol-tombol Icon Yang berfungsimewakili suatu perintah yang berada paa Menu bar.<o:p></o:p>
· ToolBox<o:p></o:p>
Jendela yang mengandung semua Object atau control yang dapat di tempelkan dan dibutukanuntuk membentuk suatu program.<o:p></o:p>
· Project(Solution) Explorer<o:p></o:p>
Jendela yang mengandung semua File yang ada didalam aplikasiyang akan kita buat :<o:p></o:p>
Contoh : Form,Module,Class,Report, dll.<o:p></o:p>
· Design View<o:p></o:p>
Daerah kerja utama Untuk Mendesign program-program Aplikasi.<o:p></o:p>
· Code View<o:p></o:p>
Tempat Mengetikkan baris program yang menjadiistruksi-instruksi.<o:p></o:p>
· Project(Object) Properties<o:p></o:p>
Jendela yang mengandung semua informasi/Sifat dari Object yang terdapat pada aplikasi yangdibuat dan terseleksi.<o:p></o:p>
2.2.5 Suhu dan Kelembaban Tanah<o:p></o:p>
Hubungan suhu dan kelembaban udara sangatberkaitan. Apabila suhu udara berubah, maka kelembaban udara pun turut berubah.Semakin sedikit volume air pada tanah dapat menyebabkan suhu udara meningkat.Hal ini dikarenakan kandungan air dalam tanah dan di udara tidak dapatmempertahankan suhu dan kelembaban. Oleh karena itu, penambahan volume airsangat erat hubungannya dengan ketersediaan air dalam tanah.<o:p></o:p>
Kadar air dalam udara dapat mempengaruhi pertumbuhan serta perkembangantumbuhan. Tempat yang lembab menguntungkan bagi tumbuhan di mana tumbuhan bisamendapatkan air lebih mudah serta berkurangnya penguapan yang akan pembentukansel yang lebih cepat.<o:p></o:p>
2.2.6. SensorSuhu LM355<o:p></o:p>
1. Definisi Sensor Suhu LM35<o:p></o:p>
Sensor adalah piranti yang menghasilkan sinyal keluaran yangsebanding dengan parameter yang diindera (sensing). Pengukuran temperatur merupakanhal yang penting. Pendeteksian temperatur dapat dilakukan dengan menggunakan sensortemperatur. Ada beberapa jenis sensor temperatur yang dapat digunakan dalampengukuran temperatur, yakni: termokopel,termistor.Sensor temperatur yang sering di gunakanadalah sensor temperatur LM35 karena keakuratannya di bandingkan dengan sensorlain. LM35 adalah sensor temperatur semiconductor-junction yang teganganout putnya sebanding dengan temperatur dalam derajat Celcius (0 C). LM35memiliki kelebihan dibandingkan sensor suhu berpresisi kelvin, dimana pemakai tidak perlu mengambil nilai tegangankonstan yang besar untuk mendapatkan skala celcius yang tepat. LM35 memilikikeadaaan default yaitu akurasi ±¼ 0 C pada temperatur ruang dan ±3/4 0 C pada range maksimum–55 sampai +150 0 C. LM35 memiliki faktor skala linier +10.0 mV/0C, ini berarti untuktiap kenaikan satu derajat celcius pada suhu sekitar tegangan output akan naik 10mV. Tegangan kerja dari LM35 adalah 4 sampai 30 Volt dengan kuat arus sebesar 60 µA.
<a href="file:///C:/Users/DISTANAK/AppData/Local/Temp/msohtmlclip1/01/clip_image032.gif" imageanchor="1" style="margin-left: 1em; margin-right: 1em;">
![]()
</a>
Gambar2.16. Sensor Temperatur LM35<o:p></o:p>
Adapunbeberapa kelebihan dari LM35 dari sensor temperatur lain adalah:
1. Hasil pengukuran lebih akurat dibandingkan dengan menggunakanthermistor.
2. Rangkain sensor tertutup dan tidak bergantung (tidak terpengaruh)pada oksidasi.
3. LM35 menghasilkan tegangan keluaran lebih besar dibandingkan dengan thermocoupledan tegangan keluaran tidak perlu diperbesar.<o:p></o:p>
2.2.7. DisplayLCD (LiquidCrystal Display)<o:p></o:p>
1. Definisi LCD (LiquidCrystal Display)
Dalam kamus besar bahasa ke wikepedia, arti dari LCD (Liquid CrystalDisplay atau dapat di bahasa Indonesia-kan sebagai tampilan Kristal Cair ) adalahsuatu jenis media tampilan yang menggunakan kristal cair sebagai penampilutama. LCD bisa memunculkan gambar atau tulisan (berwarna juga bisa dong)dikarenakan terdapat banyak sekali titik cahaya (piksel) yang terdiri dari satubuah kristal cair sebagai sebuah titik cahaya. Walau disebut sebagai titikcahaya, namun kristal cair ini tidak memancarkan cahaya sendiri. Sumber cahayadi dalam sebuah perangkat LCD adalah lampu neon berwarna putih di bagianbelakang susunan kristal cair tadi. Titik cahaya yang jumlahnya puluhan ribu bahkanjutaan inilah yang membentuk tampilan citra. Kutub kristal cair yang dilewatiarus listrik akan berubah karena pengaruh polarisasi medan magnetik yang timbuldan oleh karenanya akan hanya membiarkan beberapa warna diteruskan sedangkanwarna lainnya tersaring. Dalam menampilkan karakter untuk membantu menginformasikan prosesdan control yang terjadi dalam suatu program robot kita sering menggunakan LCDjuga. Yang sering digunakan dan paling murah adalah LCD dengan banyak karakter16x2. Maksudnya semacam fungsi tabel di ms office. 16 menyatakan kolom dan 2menyatakan baris.<o:p></o:p>
<a href="file:///C:/Users/DISTANAK/AppData/Local/Temp/msohtmlclip1/01/clip_image034.jpg" imageanchor="1" style="margin-left: 1em; margin-right: 1em;">
![Description: http://3.bp.blogspot.com/_zNxZLC5ZXXY/S695YzJ-wBI/AAAAAAAAADg/Z1St_xUQR78/s400/2.jpg]()
</a>
<o:p> </o:p>
Gambar 2.17. Display LCD<o:p></o:p>
Daridatasheet akan kita peroleh informasi-informasi seperti ini :
Fungsipin yang terdapat pada LCD ditunjukkan seperti pada Tabel 2.12<o:p></o:p>
Tabel 2.2 Fungsi pinpada LCD
<a href="file:///C:/Users/DISTANAK/AppData/Local/Temp/msohtmlclip1/01/clip_image036.jpg" imageanchor="1" style="margin-left: 1em; margin-right: 1em;">
![]()
</a>
PIN dari LCD ditunjukkan pada Gambar dibawahini<o:p></o:p>
<tbody> |
| ![Description: http://1.bp.blogspot.com/_zNxZLC5ZXXY/S696j0GMtQI/AAAAAAAAAEI/So_DYm8IJYc/s400/tambahan.PNG]() |
</tbody>
<o:p> </o:p>
Konfigurasi PIN
Gambar 2.18. PIN dariLCD
<o:p></o:p>
LCD paling umum digunakandan ditemukan di pasaran saat ini adalah 1 Line, 2 Line atau 4 Line LCD yanghanya memiliki 1 controller dan sebagian besar mendukungan 80 karakter, sedangkan LCD mendukung lebihdari 80 karakter menggunakan 2 controller HD44780.<o:p></o:p>
<a href="file:///C:/Users/DISTANAK/AppData/Local/Temp/msohtmlclip1/01/clip_image040.jpg" imageanchor="1" style="margin-left: 1em; margin-right: 1em;">
![]()
</a>
Gambar 2.19. Konfigurasi Pin LCD<o:p></o:p>
Tabel 2.3Fungsi Pin LCD Display<o:p></o:p>
<tbody> | No.<o:p></o:p> | Nama Pin<o:p></o:p> | Deskripsi<o:p></o:p> |
| 1<o:p></o:p> | GND<o:p></o:p> | 0V<o:p></o:p> |
| 2<o:p></o:p> | VCC<o:p></o:p> | +5V<o:p></o:p> |
| 3<o:p></o:p> | VEE<o:p></o:p> | Kontras LCD<o:p></o:p> |
| 4<o:p></o:p> | RS<o:p></o:p> | Register Select<o:p></o:p> |
| 5<o:p></o:p> | R/W<o:p></o:p> | 1 = Read ; 0 = Write <o:p></o:p> |
| 6<o:p></o:p> | EN<o:p></o:p> | Enable LCD, 1=enable<o:p></o:p> |
| 7<o:p></o:p> | D0<o:p></o:p> | Data Bus 0<o:p></o:p> |
| 8<o:p></o:p> | D1<o:p></o:p> | Data Bus 1<o:p></o:p> |
| 9<o:p></o:p> | D2<o:p></o:p> | Data Bus 2<o:p></o:p> |
| 10<o:p></o:p> | D3<o:p></o:p> | Data Bus 3<o:p></o:p> |
| 11<o:p></o:p> | D4<o:p></o:p> | Data Bus 4<o:p></o:p> |
| 12<o:p></o:p> | D5<o:p></o:p> | Data Bus 5<o:p></o:p> |
| 13<o:p></o:p> | D6<o:p></o:p> | Data Bus 6<o:p></o:p> |
| 14<o:p></o:p> | D7<o:p></o:p> | Data Bus 7<o:p></o:p> |
| 15<o:p></o:p> | Anoda<o:p></o:p> | Anoda Backlight LED<o:p></o:p> |
| 16<o:p></o:p> | Katoda<o:p></o:p> | Katoda Backlight LED<o:p></o:p> |
</tbody>
ModulLCD memiliki karakteristik sebagai berikut:
•Terdapat 16 x 2 karakter huruf yang bisa ditampilkan.
•Setiap huruf terdiri dari 5x7 dot-matrix cursor.
•Terdapat 192 macam karakter.
•Terdapat 80 x 8 bit display RAM (maksimal 80 karakter).
•Memiliki kemampuan penulisan dengan 8 bit maupun dengan 4 bit.
•Dibangun dengan osilator lokal.
• Satusumber tegangan 5 volt.
•Otomatis reset saat tegangan dihidupkan.• Bekerja pada suhu 0oC sampai 55oC.
Tanaman hias AspleniumNidus adalah salah satu tanamanpakis-pakisan (fern) dari orde lama yang dipelihara sejak jaman orang tua kitahingga saat ini sebagai penghias taman rumah, baik ditempatkan di dalam potmaupun ditempelkan di batang tanaman penaung halaman. Tanaman ini disukaikarena bentuk keseluruhan tanaman yang membentuk mangkuk mirip sarang burung.Bentuk mangkuk ini adalah akibat pertumbuhan daunnya ke segala arah yangmuncul dari pusat batang yang pipih dan tidak bertambah tinggi. Pakis sarang burung sebenarnya memiliki berjenis jenisvariant yang bisa dibedakan dari bentuk dan ukuran daunnya. Ada yang berbentuklebar lurus dan besar, ada yang halus dan keriting, ada yang bentuknya sepertitercabik-cabik, ada yang ikal berantakan dan sebagainya. Namun yang paling umumkita temukan tumbuh liar di pepohonan di<a href="http://maps.google.com/maps?ll=-6.175,106.828333333&spn=10.0,10.0&q=-6.175,106.828333333%20%28Indonesia%29&t=h" title="Indonesia">Indonesia</a> adalah yangberdaun lebar dan lurus. Jenis ini juga yang telah menghiasi halaman-halamanrumah selama bertahun-tahun.<o:p></o:p> Tanamanini membutuhkan kadar air pada tanah yang bervariasi.Ada beberapa tanaman hias yang membutuhkan tanah lembab, kering, atau bahkanberair. Berikut Contoh beberapa tanaman hias beserta tingkat kadar air yang dibutuhkan:
Euphorbia (Kering)
Plumaria/ Kamboja (Lembab)
Aglonema (Berair)
Euphorbia membutuhkan sedikit air karena di memiki daunsedikit dan kecil sehingga tidak menghabiskan banyak air saat fotosintesis.
Daunnya memang kecil dan sedikit,tetapi Plumaria/kamboja membutuhkan air yang sedang karena struktur batangnyayang berair. Oleh karena itu prosesosmosis juga membutuhkan air yang cukup banyak. Tanaman dengan jenisaglaonema membutuhkan banyak air karena berdaun lebar dan batangnya yang berair.
2.2.8.1. JenisPupuk
Pemupukan bertujuanuntuk menambah hara yang dibutuhkan oleh tanaman sebab unsur hara yang terdapatdalam tanah tidak bisa diandalkan untuk memacu pertumbuhan tanaman secaraoptimal. Aplikasi pemupukan pada tanaman tomat bisamenggunakan pupuk cair organik dan pupuk anorganik. Saat awalpertumbuhan, tanaman sebaiknya dipupuk dengan pupuk yang kandungan nitrogen danphospornya tinggi. Setelah dewasa dan mendekati masa-masa prroduktif, gunakanpupuk yang kandungan kaliumnya tinggi. Padapenanaman tomat secara konvensional, pupuk cair organikdiberikan secarabertahap sampai tumbuh normal dan berbuah.<o:p></o:p>
2.2.9. Pompa Air (Water Pump)
1. Definisi Pompa Air (Water Pump)
Pompa airadalah sebuah alat atau mesin yang digunakan untuk memompa air dari suatutempat ke tempat yang lain.pompa sangat lah penting karena itulag sumberkehidupan bagi biota dalam akuarium laut. Di pasaran banyak tersedia pompa airtawar,air laut ataupun keduanya. penting untuk memilih pompa air yang dapat digunakan untuk air laut. Adapun ukuran atau kekuatan pompa air bervariasi,yangmasing2 infonya dapat kita lihat pada bagian pompa, kotak,dll biasanya yangpenting untuk membandingkan pompa yang dibutuhkan adalah kebutuhan listriknya,terkadang ada pompa yang besar wattnya akan tetapi kapasitasnyakecil,sebaliknya ada yang hemat dan efektif, max head adalah ketinggian yangmampu pompa itu memompa akan tetapi biasanya tulisan tersebut belum tentusepenuhnya pompa tersebut dapat meng angkat dengan ketinggian tersebut,kapasitas pompa pun patut untuk di lihat karena biasanya kita akan menyesuaikandengan kebutuhan dan kondisi akuarium kita. Sementar kegunaan pompa meliputbisa dibilang 3 bagian pompa serikulasi.filter return pump, pompa arus danpompa untuk protein skimmer .pump serikulasi pun harus merupakan pompa yangkuat karena merupakan sistem utam semuafiltrasi dan membawa air dari akuarium ke filter serta dikembalikan lagi.<o:p></o:p>
debit pompabisa kita lihat pada tabel yang biasanya tercantum dalma produk kemasan. Pompapunmerupakan sumber oksigen bagi biota di akuarium. Pompa air biasa ada yangsubmersible pump,inline pump, juga ada yang seperti pompa sumur tetapi bisajalan 24 jam nonstop.<o:p></o:p>
![]() <o:p></o:p>
<o:p></o:p>
Gambar 2.20. Water Pump Aquarium<o:p></o:p>
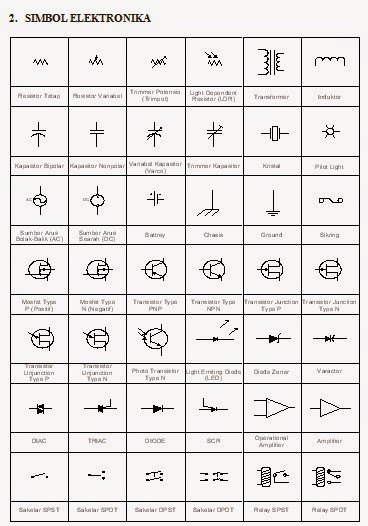
2.2.10. Komponen Elektronika<o:p></o:p>
1. Lampu led<o:p></o:p>
Lampu LED atau kepanjangannya (lightemitting diode) adalah suatu lampu indikator dalam perangkat elektronika yangbiasanya memiliki fungsi untuk menunjukkan status dari perangkat elektronikatersebut. Misalnya pada sebuah komputer, terdapat lampu LED power dan led indikator untuk processor, ataudalam monitor terdapat juga lampu ledpower dan power saving. Lampu ledterbuat dari plastik dan dioda semikonduktor yang dapat menyala apabila dialiritegangan listrik rendah (sekitar 1.5 volt DC). Bermacam-macam warna dan bentukdari lampu led, disesuaikan dengankebutuhan dan fungsinya. Bentuk fisik dari lampu led dapat dilihat pada gambar 2.12 sebagai berikut:<o:p></o:p>
Gambar 2.21. Lampu led<o:p></o:p>
Sumber : diambil dari marktechopto.com<o:p></o:p>
A. Fungsi lampu led<o:p></o:p>
2. Resistor<o:p></o:p>
Resistor atau tahanan adalah salah satukomponen elektronika yang berfungsi untuk mengatur serta menghambat aruslistrik. Resistor adalah komponen dasar elektronika yang dipergunakan untukmembatasi jumlah arus yang mengalir dalam suatu rangkaian. Sesuai dengannamanya resistor bersifat resistifdan biasanya komponen ini terbuat dari bahan karbon. Berdasarkan hokum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalirmelaluinya. Satuan resistansi darisuatu resistor disebut Ohm ataudilambangkan dengan simbol W(Omega). Untuk menghitung hambatan padaresistor dapat menggunakan rumus sebagai berikut:<o:p></o:p>
![\begin{align}V&=IR\\I&=\frac{V}{R}\end{align}]() <o:p></o:p>
<o:p></o:p>Keterangan:
V = teganganlistrik (volt )
I = arus yang mengalir (ampere)
R = tahanan (ohm)
Untuk mengetahui nilai resistor berdasarkan warnanya dapat dilihatpada table 2.1 sebagai berikut:<o:p></o:p>
<o:p> </o:p>
![]()
<o:p></o:p>
Tabel2.4. Tabel baca resistor
Sumber :Rusmadi (2009:13)
Penjelasandari kode warna resistor pada gambar 2.13 sebagai berikut:<o:p></o:p>
· Kode I, menyatakan angka ke satu<o:p></o:p>
· Kode II, menyatakan angka ke dua<o:p></o:p>
· Kode III, menyatakan faktor pengali<o:p></o:p>
· Kode IV, menyatakan nilai toleransi atau batasantara nilai tahanan terbesar dengan nilai tahanan yang terkecil.<o:p></o:p>
Misalkan diketahuiwarna tahanan terdiri dari merah-hijau-orange-emas, berarti nilai resistansinya= 25.000 ohm ± 5% = 25 K ohm ± 5%.<o:p></o:p>
Nilaimaksimal dari resistansinya = 25.000 + (25.000 X 5%) = 26.250 ohm.<o:p></o:p>
Nilaimaksimal dari resistansinya = 25.000 -(25.000 X 5%) = 26.250 ohm.<o:p></o:p>
Menurut macamnya resistor terbagi atas dua macam yaitu:
1. Resistor Tetap ( Fixed Resistor)
Resistor tetap adalah resistor yang memilikinilai hambatan yang tetap tidak dapat diubah-ubah. Apabila nilai tahanannyasemakin besar, maka arus semakin kecil. Sebaliknya bila nilai tahanannya kecil,maka arus yang mengalir semakin besar. Resistor memiliki batas kemampuan dayamisalnya : 1/16 watt, 1/8 watt, ¼ watt, ½ watt. Artinya resitor hanya dapatdioperasikan dengan daya maksimal sesuai dengan kemampuan dayanya. Adapun resistortidak tetap dapat dilihat pada gambar 2.14.<o:p></o:p>
<a href="file:///C:/Users/DISTANAK/AppData/Local/Temp/msohtmlclip1/01/clip_image048.jpg" imageanchor="1" style="margin-left: 1em; margin-right: 1em;">
![]()
</a>
<o:p></o:p>
<o:p></o:p>
Gambar 2.22. Bentuk fisik dan simbol resistor tetap<o:p></o:p>
2. Resistor Tidak Tetap (Variable Resistor)
Ialah resistor yang nilai hambatannya atau resistansinya dapat diubah-ubah. Jenisnyaantara lain : hambatan geser, trimpot dan potensiometer. Yang banyak digunakanialah trimpot dan potensimeter.<o:p></o:p>
a. Tahanan Variabel adalah jenistahanan yang resistansinya bisadiubah-ubah, seperti Potensiometer dengancara diputar danTrimpot (trimer potensiometer).<o:p></o:p>
b. LDR(Light Dependent Resistance)<o:p></o:p>
adalah tahanan yang nilai resistansinyadipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahayadan membesar apabila tidak terkena cahaya.<o:p></o:p>
c. NTC (negative thermal coeffisien) dan PTC (positivethermal coeffisien) adalahjenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC padasuhu yang tinggi nilai tahanannya turun dan pada suhu yang rendah nilaitahananya naik, sedangkan PTC kebalikannya pada suhu yang tinggi nilaitahanannya naik dan pada suhu yang rendah nilai tahanannya turun.<o:p></o:p>
Adapunresistor tidak tetap dapat dilihat seperti pada gambar 2.15 sebagai berikut:<o:p></o:p>
![]() <o:p></o:p>
<o:p></o:p> <o:p></o:p>
Gambar 2.23. Bentuk fisik dan simbol resistor tidak tetap<o:p></o:p>
3. Kapasitor<o:p></o:p>
Kapasitor adalah komponen elektronika yang mempunyai kemampuanmenyimpan electron-elektron selamawaktu yang tidak tertentu. Kapasitor berbeda dengan akumulator dalam menyimpanmuatan listrik terutama tidak terjadi perubahan kimia pada bahan kapasitor,besarnya kapasitansi dari sebuah kapasitor dinyatakan dalam farad.
Pengertian lain kapasitor adalah komponen elektronika yang dapatmenyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrikyang umum dikenal misalnya udara vakum, keramik, gelas, elektrolit dan lain-lain.
Jika kedua ujung plat metal diberitegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satukaki (elektroda) metalnya dan padasaat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi.Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknyamuatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah olehbahan dielektrik yang non-konduktif.Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung-ujungkakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuatdengan kapasitansi atau kapasitas. Untuk melihat kontruksi dari kapasitor,dapat dilihat pada gambar 2.16 sebagai berikut:
Gambar 2.24. Susunan lapisan kapasitor<o:p></o:p>
Kapasitansi didefenisikan sebagai kemampuan dari suatu kapasitoruntuk dapat menampung muatan elektron.Coulombs pada abad 18 menghitungbahwa 1 coulomb = 6.25 x 1018elektron. Kemudian Michael Faraday membuat postulatbahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1 farad jika dengan tegangan 1 voltdapat memuat muatan elektron sebanyak1 coulombs. Dengan rumus dapatditulis : <o:p></o:p>
Q =CV <o:p></o:p>
Dimana: <o:p></o:p>
Q =muatan elektron dalam C (coulomb)<o:p></o:p>
C =nilai kapasitansi dalam F (farad) <o:p></o:p>
V =besar tegangan dalam V (volt)
Dalam praktek pembuatan kapasitor, kapasitansi dihitung denganmengetahui luas area plat metal (A), jarak (t) antara kedua plat metal (tebal dielektrik) dan konstanta (k) bahandielektrik. Dengan rumusan dapat ditulis sebagai berikut : <o:p></o:p>
C = (8.85 x 10-12) (k A/t)
Contoh konstanta (k)dari beberapa bahan dielektrik yangdisederhanakan dapat dilihat pada tabel2.2 sebagai berikut: <o:p></o:p>
<tbody> | Udara vakum<o:p></o:p> | k = 1 <o:p></o:p>
|
| Aluminium oksida<o:p></o:p> | k = 8 <o:p></o:p>
|
| Keramik<o:p></o:p> | k = 100 – 1000 <o:p></o:p>
|
| Gelas<o:p></o:p> | k = 8 <o:p></o:p>
|
| Polyethylene<o:p></o:p> | k = 3 <o:p></o:p>
|
</tbody>
<o:p></o:p>
<o:p></o:p>
Tabel 2.5. Bahan Dielektrik Yang Di Sederhanakan<o:p></o:p>
b. Prinsip PembentukanKapasitor<o:p></o:p>
1. Jika dua buah plat atau lebih yang berhadapan dan dibatasi olehisolasi, kemudian plat tersebut dialiri listrik maka akan terbentuk kondensator(isolasi yang menjadi batas kedua plat tersebut dinamakan dielektrikum). <o:p></o:p>
2. Bahan dielektrikum yangdigunakan berbeda-beda sehingga penamaan kapasitor berdasarkan bahan dielektrikum. Luas plat yang berhadapanbahan dielektrikum dan jarak keduaplat mempengaruhi nilai kapasitansinya.<o:p></o:p>
3. Pada suatu rangkaian yang tidak terjadi kapasitor liar. Sifat yangdemikian itu disebutkan kapasitansi parasitic.Penyebabnya adalah adanya komponen-komponen yang berdekatan pada jalurpenghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan.<o:p></o:p>
![]() <o:p></o:p>
<o:p></o:p> Gambar2.25. Lapisan dalam kapasitor
Gambar 2.17 diatas menunjukan bahwa ada dua buah plat yang dibatasiudara. Jarak kedua plat dinyatakan sebagai d dan tegangan listrik yang masuk. BesaranKapasitansi Kapasitas dari sebuahkapasitor adalah perbandingan antara banyaknya muatan listrik dengan tegangankapasitor dapat ditulis menggunakan rumus sebagai berikut: C = Q /V <o:p></o:p>
Jika dihitung dengan rumus C= 0,0885 D/d. Maka kapasitasnya dalamsatuan piko farad <o:p></o:p>
D = luas bidang plat yang saling berhadapandan saling mempengaruhi dalam satuancm2.
d = jarakantara plat dalam satuan cm. Bila tegangan antara plat 1 volt dan besarnya muatan listrik pada plat 1 coulomb, makakemampuan menyimpan listriknya disebut 1 farad.Dalam kenyataannya kapasitor dibuat dengan satuan dibawah 1 farad. Kebanyakan kapasitor elektrolit dibuat mulai dari 1 mikrofarad sampai beberapa milifarad.
c. Jenis-jenis kapasitor sesuai bahan dan konstruksinya.<o:p></o:p>
Kapasitor seperti juga resistor nilai kapasitansinya ada yang dibuattetap dan ada yang variabel. Kapasitor dielektrikumudara, kapasitansinya berubah dari nilai maksimum ke minimum. Kapasitor variabel sering kita jumpai padarangkaian pesawat penerima radio dibagian penala dan osilator. Agar perubahankapasitansi di dua bagian tersebut serempak maka digunakan kapasitor variabelganda. Kapasitor variabel ganda adalah dua buah kapasitor variabel dengan satu pemutar. Berdasarkan dielektrikum kapasitor dibagi menjadi beberapa jenis, antara lain: <o:p></o:p>
1. kapasitor keramik <o:p></o:p>
2. kapasitor film kapasitor elektrolit <o:p></o:p>
3. kapasitor tantalum <o:p></o:p>
4. kapasitor kertas <o:p></o:p>
Berdasarkan polaritaskutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu : <o:p></o:p>
1. Kapasitor Non-Polar,kapasitor yang tidak memiliki polaritas pada kedua elektroda dan tidak perludibedakan kaki elektrodanya dalam pesangannya pada rangkaian elektronika. <o:p></o:p>
2. Kapasitor Bi-Polar, yaitu kapasitor yang memiliki polaritas positif dannegatif pada elektrodanya, sehingga perlu diperhatikan pesangannya padarangkaian elektronika dan tidak boleh terbalik. Kapasitor elektrolit dankapasitor tantalum adalah kapasitor yang mempunyai kutub atau polar, seringdisebut juga dengan nama kapasitor polar. Kapasitor film terdiri dari beberapajenis yaitu
polyester film, poly propylene film.
4. Kristal <o:p></o:p>
Berfungsi untuk menghasilkan sinyal dengan tingkat kestabilanfrekuensi yang sangat tinggi. Kristal pada oscilatorini terbuat dari quartz atau Rochelle salt dengan kualitas yang baik.Material ini memiliki kemampuan mengubah energi listrik menjadi energi mekanikberupa getaran atau sebaliknya. Kemampuan ini lebih dikenal dengan piezoelectric effect.<o:p></o:p>
![]()
<o:p></o:p>
<o:p></o:p>
Gambar 2.26. Rangkaian internal kristal<o:p></o:p>
Gambar diatas memperlihatkan rangkaian setara kristal. Rangkaiansetara resonansi seri akan berubah jika kristal ditempatkan pada suatu wadahatau “pemegang”. Kapasitansi akibat adanya keping logam akan terhubung paraleldengan rangkaian setara kristal. Dalam hal ini kristal memiliki kemampuan untukmemberikan resonansi paralel dan resonansi seri.
Pada oscilator, kristalyang berfungsi sebagai rangkaian resonansi seri, kristal seolah-olah memilikiinduktansi (L), kapasitansi (C) dan resistansi (R). Nilai L ditentukan olehmassa kristal, harga C ditentukan oleh kemampuannya berubah secara mekanik danR berhubungan dengan gesekan mekanik. Berikut adalah contoh oscilator menggunakan tank cirkuit kristal sebagai resonansi seri.
![]() <o:p></o:p>
<o:p></o:p> Gambar 2.27. Rangkaian oscilator hartley dengan kristal
![]() <o:p></o:p>
<o:p></o:p>Kristal ini dapat dioperasikan pada rangkaian tangki dengan fungsisebagai penghasil frekuensi resonansi paralel. Kristal sendiri dapatdioperasikan sebagai rangkaian tangki. Jika kristal diletakkan sebagai jaringanumpan balik, kristal akan merespon sebagai piranti penghasil resonansi seri.Kristal sebenarnya merespon sebagai tapis yang tajam. Kristal dapat difungsikansebagai umpan balik pada suatu frekuensitertentu saja. Oscilator hartley dan colpitts dapat dimodifikasi denganmemasang kristal ini. Stabilitas oscilator akan meningkat dengan pemasangankristal.
5. IC regulator<o:p></o:p>
Salah satu tipe regulatortegangan tetap adalah 78XX. Regulator tegangantipe 78XX adalah salah satu regulator tegangan tetap dengan tiga terminal,yaitu terminal VIN, GND dan VOUT. Tegangan keluaran dari regulator78XX memungkinkan regulator untukdipakai dalam sistem logika, instrumentasidan Hifi. Regulator tegangan 78XX dirancang sebagai regulator tegangan tetap, meskipun demikian dapat juga keluarandari regulator ini diatur tegangandan arusnya melalui tambahan komponen eksternal.Pada umumnya catu daya selalu dilengkapi dengan regulator tegangan. Tujuan pemasangan regulator tegangan pada catu daya adalah untuk menstabilkantegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan adalah untukperlindungan dari terjadinya hubung singkat pada beban.
Untuk melihat karakteristik regulatortegangan positif 78xx dapat dilihat pada tabel 2.3 sebagai berikut:
![]() <o:p></o:p>
<o:p></o:p> Tabel 2.6. KarakteristikIC regulator tegangan positif 78xx<o:p></o:p>
Angka xx pada bagian terakhir penulisan tipe regulator 78xx merupakan besarnya tegangan output dari regulatortersebut. Kemudian huruh L, M merupakan besarnya arus maksimum yang dapatdialirkan pada terminal output regulator tegangan positif tersebut.Untuk penulisan tanpa huruf L ataupun M (78(L/M)xx) pada regulator tegangan positif 78xx maka arus maksimal yang dapatdialirkan pada terminal outputnyaadalah 1 ampere. Karakteristik dantipe-tipe kemampuan arus maksimal outputdari regulator tegangan positif 78xxdapat dilihat pada tabel diatas. Kode huruf pada bagian depan penulisan tipe regulator 78xx merupakan kode produsen(AN78xx, LM78xx, MC78xx) regulator teganganpositif 78xx. Cara pemasangan dari regulator tegangan tetap 7805 pada catudaya dapat dilihat pada gambar 2.21 sebagai berikut.
1. Penggunaan IC regulator dalamrangkaian<o:p></o:p>
IC 7805 merupakan IC peregulasi, dimana IC 7805 bekerja pada sumberarus searah yang menghasilkan keluaran 5 voltsedangkan pada rangkaian IC ini digunakan untuk memaksa keluaran yang kitaberikan diatas 5 volt menjadi 5 volt dengan hasil positif, sesuai dengandata IC 7805 bekerja efektif antara range 7V-20V. IC 7805 terdapat beberapamacam mulai dari komponen SMD (surface mount device) sampai aplikasiumum dengan keluaran arus sampai dengan 1A.
<o:p></o:p>
Gambar 2.30. Rangkaian IC regulator<o:p></o:p>
6. Tombol reset<o:p></o:p>
Proses reset merupakan proses untuk mengembalikan sistem ke kondisi semula. Power-on reset merupakan peroses reset yang berlangsung secara otomatis padasaat sistem pertama kali diberi daya. pin reset juga dapat diberi rangkaian manual reset.beberaparangkaian yang umum digunakan terdapat pada gambar 2.23 pemberian rangkaian ini membuat sistem dapat di-reset oleh usersetiap saat dengan menekan tombol reset.<o:p></o:p>
Gambar 2.31.Rangkaian power-on reset<o:p></o:p>
2.2.11. Elisitasi<o:p></o:p>
1. Definisi Elisitasi<o:p></o:p>
Menurut Guritno, Sudaryono dan UntungRahardja (2010:302), “Elisitasi (elicitation)berisi usulanrancangan sistem baru yang diinginkan oleh pihak manajemen terkait dandisanggupi oleh penulis untuk dieksekusi”.<o:p></o:p>
Menurut Nugroho (2010:10), Akuisisiinformasi dari seseorang atau kelompok dengan cara yang tidak mengungkapkanmaksud dari wawancara atau percakapan. Sebuah teknik pengumpulan intelijen sumbermanusia, umumnya terbuka.<o:p></o:p>
Berdasarkan beberapa pendapatyang dikemukakan di atas dapat ditarik kesimpulan bahwa elisitasi adalah akuisi informasi dari seorang kelompok atau usulan rancangan sistem baruyang diinginkan oleh pihakterkait dan disanggupi oleh penulis untuk dieksekusi. <o:p></o:p>
2. Jenis-jenis Elisitasi<o:p></o:p>
Guritno,Sudaryono dan Untung Rahardja (2010:302), Elisitasi didapat melalui metode wawancara dan dilakukan melalui tigatahap, yaitu sebagai berikut:<o:p></o:p>
1. Elisitasi Tahap I<o:p></o:p>
Berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proseswawancara. <o:p></o:p>
2. Elisitasi Tahap II<o:p></o:p>
Merupakan hasilpengklasifikasian dari elisitasi tahap I berdasarkan metode MDI. Metode MDI inibertujuan untuk memisahkanantara rancangan sistem yang penting dan harus ada pada sistem baru denganrancangan yang disanggupi untuk dieksekusi.<o:p></o:p>
a. M pada MDI itu artinya Mandatory.Maksudnya requirement tersebut harusada dan tidak boleh dihilangkan pada saat membuat sistem baru.<o:p></o:p>
b. D pada MDI itu artinya Desirable.Maksudnya requirement tersebut tidak terlalu penting dan boleh dihilangkan.Tetapi jika requirement tersebutdigunakan dalam pembentukan sistem, akan membuat sistem tersebut lebih perfect.<o:p></o:p>
c. I pada MDI itu artinya Inessential.Maksudnya bahwa requirement tersebutbukanlah bagian dari sistem yang dibahas dan merupakan bagian dari luar sistem.<o:p></o:p>
3. Elisitasi Tahap III<o:p></o:p>
Merupakan hasil penyusutan dari elisitasi tahap II dengancara mengeliminasi semua requirementyang optionnya I pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali melalui metodeTOE.<o:p></o:p>
a. T artinya Technical, maksudnyabagaimana tata cara / tehnik pembuatan requirementtersebut dalam sistem yang diusulkan.<o:p></o:p>
b. artinya Operasional, maksudnyabagaimana tata cara penggunaan requirementtersebut dalam sistem yang akan dikembangkan.<o:p></o:p>
c. E artinya Economic, maksudnyaberapakah biaya yang diperlukan guna membangun requirement tersebut di dalamsistem.<o:p></o:p>
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu sebagai berikut:<o:p></o:p>
a. High (H) :Sulit untuk dikerjakan, karena tehnik pembuatan dan pemakaiannya sulit sertabiayanya mahal. Sehingga requirementtersebut harus dieliminasi.<o:p></o:p>
b. Middle (M) :Mampu untuk dikerjakan.<o:p></o:p>
c. Low (L) :Mudah untuk dikerjakan.<o:p></o:p>
4. Final Draft Elisitasi<o:p></o:p>
Final draft merupakan hasil akhir yang dicapai dari suatu proseselisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akandikembangkan.<o:p></o:p>
2.3 LiteraturReview<o:p></o:p>
Literatur Review ini dilakukan oleh peneliti untuk mengetahui landasan awal dansebagai pendukung bagi kegiatan penelitian yang dilakukan oleh peneliti,sehingga dapat melakukan pengembangan ketingkat yang lebih tinggi dalam rangkamenyempurnakan atau melengkapi penelitian yang nantinya saya tulis dengan judul“ALAT PENYIRAM TANAMAN DAN MEMBERIPUPUK OTOMATIS MENGGUNAKAN SENSOR SUHU BERBASIS ARDUINO UNO PADA DINASPERTANIAN DAN PETERNAKAN KABUPATEN.TANGERANG”. Adapun Literature Review sebagailandasan dalam mendukung penelitian adalah sebagai berikut:<o:p></o:p>
1. Penelitian yang dilakukan oleh Ade Irfan Firdaus (2014)berjudul “PENGENDALIAN ALAT PENYIRAMAN TANAMAN MENGGUNAKAN APLIKASI ANDROID” Penelitianini membahas tentang suatu sistem pengendalian alat penyiramantanaman menggunakan device OS Androidpada smartphone. Smartphone sebagai interface pengontrolanberfungsi untuk memberikan instruksi atau mengontrol peralatan penyiram tanamanmenggunakan jaringan wireless. Dimana instruksi yang dikirimkan melalui smartphonediterima oleh perangkat wirelessdan diteruskan ke rangkaian ATMega328.
2. Penelitian yang dilakukan oleh Kaharuddin Universitas Haluoleo, Kendari (2013) berjudul “Kontrol Alat Penyiram Tanaman Otomatis MenggunakanReal Time Clock ( RTC ) Berbasis Mikrokontroller Avr Atmega 16”Penelitian ini membahas tentang suatu sistem penyiram tanaman dengan menggunakanReal Time Clock untuk menyiramtanaman dengan berbasis MikrokontrollerAvr Atmega 16.
3. Penelitianyang dilakukan oleh Erlawita Novana Emping Universitas Gunadarma (2013) berjudul “PenyiramTanaman Otomatis Menggunakan Sensor Kelembaban Dan Sensor Cahaya” penelitian ini membahas tentangsuatu sistem pengendalian alat penyiram tanaman dengan menggunakan sensorcahaya untuk menyiram tanaman, pada saat matahari terbenam maka alat tersebutakan secara otomatis menyiram tanaman.<o:p></o:p>
4. Penelitian yangdilakukan oleh<o:p></o:p>
Dari beberapa sumber literature review di atas, dapatdiketahui bahwa penelitian tentang mikrokontroller, sensor suhu, timer sudah banyakdi bahas. Dalam beberapa sumber literaturereview tersebut informasi yang di berikan masih terbatas. Sedangkan saatini kemajuan teknologi sudah sudah berkembang dengan pesat. Sehinggapengontrolan dapat di lakukan dengan menggabungkan cara kerja dari dua mediayang berbeda yaitu timer dan sensor suhu LM355 dalam satu alat yang dimana di gunakan sebagaimedia untuk pengontrolan alat tersebut. Untuk itu dibuatlah penelitian yangberjudul “ALAT PENYIRAM TANAMAN DAN MEMBERI PUPUK OTOMATIS MENGGUNAKAN SENSOR SUHUBERBASIS ARDUINO UNO PADA DINAS PERTANIAN DAN PETERNAKAN KABUPATEN.TANGERANG”. <o:p></o:p>