SI0931462664

AKSES KONTROL KENDARAAN BERMOTOR RODA EMPAT
MENGGUNAKAN PASSWORD DAN SENSOR INFRARED
BERBASIS MIKROKONTROLLER ATmega328

Disusun Oleh :
NAMA |
: ARFA
|
NIM |
: 0931462664
|
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
(2014)
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
AKSES KONTROL KENDARAAN BERMOTOR RODA EMPAT MENGGUNAKAN PASSWORD
DAN SENSOR INFRARED BERBASIS MIKROKONTROLLER ATmega328
Disusun Oleh :
NIM |
: 0931462664
|
Nama |
: Arfa
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Kompuetr Sistem
|
Konsentrasi |
: Computer System
|
Disahkan Oleh :
Tangerang, Januari 2014
| Ketua |
Kepala Jurusan
| ||||
| STMIK Raharja, |
Jurusan Sistem Komputer,
| ||||
| (Ir. Untung Rahardja, M.T.I) |
(Ferry Sudarto, S.Kom,.M.Pd)
| ||||
| NIP : 000594 |
NIP : 079010
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
AKSES KONTROL KENDARAAN BERMOTOR RODA EMPAT MENGGUNAKAN PASSWORD
DAN SENSOR INFRARED BERBASIS MIKROKONTROLLER ATmega328
Disusun Oleh :
NIM |
: 0931462664
|
Nama |
: Arfa
|
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2013/2014
Disetujui Oleh :
Tangerang, Januari 2014
| Pembimbing I |
Pembimbing II
| ||
| (Hani Dewi Ariessanti, M.Kom) |
(Muhammad Iqbal Dzulhaq,S.Kom)
| ||
| NID : 12003 |
NID : 12005
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
AKSES KONTROL KENDARAAN BERMOTOR RODA EMPAT MENGGUNAKAN PASSWORD
DAN SENSOR INFRARED BERBASIS MIKROKONTROLLER ATmega328
Disusun Oleh :
NIM |
: 0931462664
|
Nama |
: Arfa
|
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2013/2014
Dewan Penguji :
Tangerang, Januari 2014
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (Ir. Untung Rahardja, M.T.I) |
(Sri Rahayu, S.T.,MMSI) |
(Hani Dewi Ariessanti, M.Kom)
| ||
| NID : 99001 |
NID : 08182 |
NID : 12003
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
Saya yang bertandatangan di bawah ini,
NIM |
: 0931462664
|
Nama |
: Arfa
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Computer System
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja, maupun Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Tangerang, Januari 2014
( Arfa )
|
| NIM : 0931462664
|
)*Tanda tangan dibubuhi materai 6.000;
ABSTRAKSI
Pengontrolan kendaraan bermotor roda empat umumnya masih menggunakan cara konvesional, baik dalam menentukan arah atau jalan yang tidak terdapat kendaraan di depannya. Dengan kemajuan teknologi, khususnya dalam bidang mikrokontroller, sehingga dapat dibuat sistemakses kontrol yang dapat mengontrol kendaraan roda empat. Dengan memanfaatkan mikrokontroller sebagai pengolah data terciptalah pemikiran untuk membuat sistem kontrol kendaraan bermotor yang menggunakan metode password akses dan sensor infraredsebagai pendeteksi objek. Dengan menggunakan mikrokontroller sebagai pengolahdata yang masuk yang berupa inputan dari keypad dan sensor infrared, kemudian data tersebut akan di proses oleh mikrokontroller selanjutnya data hasil proses darimikrokontroller tersebut akan menjadi inputan bagi motor DC dan motor servo sehingga mesin kendaraan bermotor dapat di kontrol secara penuh dari keypad dan sensor infrared untuk melakukan pergerakan baik pergerakan untuk maju,mundur dan untuk menentukan arah belokan dari kendaraan tersebut.
Kata kunci : Mikrokontroller ATmega328, password, sensor infrared
KATA PENGANTAR
Bismillahirrahmanirrahim
Assalamu’alaikum Wr. Wb.
Segala puji syukur penulis panjatkan kehadirat Allah SWT yang telah melimpahkan rahmat serta karunianya, sehingga penulis dapat menyusun dan menyelesaikan laporan skripsi ini dengan judul “Akses Kontrol Kendaraan Bermotor Roda Empat Menggunakan Password dan Sensor Infrared Berbasis Mikrokontroller ATmega328”. Penulis menyadari bahwa dalam menyusun skripsi inimasih jauh dari sempurna. Hal ini disebabkan karena terbatasnya kemampuan dan pengetahuan yang penulis miliki, maka diharapkan kritik dan saran yang sifatnya membangun.
Atas bantuan yang diberikan pada kesempatan ini penulis mengucapkan banyak terima kasih kepada semua pihak yang telah membantu terwujudnya penulisan Laporan Tugas Akhir ini, maka penulis mengucapkan terima kasih kepada :
1. Bapak Ir. Untung Rahardja, M.T.I, selaku Ketua STMIK Raharja.
2. Bapak Sugeng Santoso, M.Kom selaku Pembantu Ketua I STMIK Raharja.
3. Bapak Ferry Sudarto,S.Kom.,M.pd. selaku Kepala Jurusan Sistem Komputer Pada Perguruan Tinggi Raharja.
4. Ibu Hani Dewi Ariessanti, M.Kom, selaku dosen pembimbing I untuk laporan skripsi.
5. Bapak Muhammad Iqbal Dzulhaq, S.Kom selaku sebagai dosen pembimbing II untuk skripsi ini.
6. Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmunya.
7. Kedua orang tua tercinta yang selalu memberikan dukungan baik moril maupun materil dan do’a. “Semoga Allah SWT senantiasa memberikan rahmat dan karunianya kepada beliau, Amin.
8. Sahabat dan teman-teman yang telah banyak membantu dalam penyusunan laporan skripsi ini.
9. Serta semua pihak yang tidak dapat disebutkan satu persatu yang telah memberikan semangat dalam menyelesaikan laporan skripsi ini.
Penulis berharap mudah-mudahan laporan skripsi ini dapat bermanfaat bagi semua pihak yang memerlukan dan penulis mohon maaf apabila ada kesalahan dalam laporan skripsi ini.
Tangerang, Januari 2014
(Arfa)
NIM: 0931462664
DAFTAR GAMBAR
Gambar 2.1. Sistem pengendali loop terbuka
Gambar 2.2. Sistem pengendali loop tertutup
Gambar 2.3. Konfigurasi pin ATmega328
Gambar 2.4. Arsitektur ATmega328
Gambar 2.5. Kontruksi pin dan rangkaian driver motor DC IC L293
Gambar 2.6. Keypad membrane 4x3
Gambar 2.7. Konfigurasi pin output keypad 4x3
Gambar 2.8. Bentuk fisik sensor infrared
Gambar 2.9. Bentuk fisik motor servo standard
Gambar 2.10. Pulsa kendali motor servo
Gambar 2.11. Bagian dalam motor DC
Gambar 2.12. Lampu led
Gambar 2.13. Bentuk fisik dan lambang resistor tetap
Gambar 2.14. Bentuk fisik dan lambang resistor tidak tetap
Gambar 2.15. Susunan lapisan kapasitor
Gambar 2.16. Lapisan dalam kapasitor
Gambar 2.17. Rangkaian internal Kristal
Gambar 2.18. Rangkaian oscilator Hartley dengan Kristal
Gambar 2.19. Rangkaian oscilator colpitts dengan Kristal
Gambar 2.20. Rangkaian dasar IC regulator tegangan positif
Gambar 2.21. Rangkaian IC regulator
Gambar 2.22. Rangkain power-on reset
Gambar 3.1. Diagram blok rangkaian
Gambar 3.2. Rangkaian sistem minimum mikrokontroller ATmega328
Gambar 3.3. Rangkaian catu daya
Gambar 3.4. Rangkaian keypad membrane 4x3
Gambar 3.5. rangkaian lampu led
Gambar 3.6. Rengkaian motor servo
Gambar 3.7. Rangkaian sensor infrared
Gambar 3.8. Rangkaian driver motor L293
Gambar 3.9. Skema rangkaian sistem keseluruhan
Gambar 3.10. Membuka program Arduino 1.0
Gambar 3.11. Tampilan layar program Arduino 1.0
Gambar 3.12. Konfigurasi port melalui device manager
Gambar 3.12. Menentukan koneksi port 4 pada Arduino 1.0
Gambar 3.14. Menyimpan file program pada Arduino 1.0
Gambar 3.15. Menyimpan program pada Arduino 1.0
Gambar 3.16. Mengimpor library pada header Arduino 1.0
Gambar 3.17. Library-library yang digunakan pada Arduino 1.0
Gambar 3.18. Proses kompilasi listing program
Gambar 3.19. Hasil kompilasi listing program
Gambar 3.20. Rangkaian board Arduino dengan internal clock
Gambar 3.21. Pemilihan Arduino board
Gambar 3.22. Mengupload program kedalam mikrokontroller ATmega328
Gambar 3.23. Proses upload listing program sukses
Gambar 3.24. Flowchart sistem keseluruhan
Gambar 4.1. Pengujian rangkaian catu daya
Gambar 4.2. pengujian rangkaian keypad 4x3
Gambar 4.3. Pengujian rangkaian motor servo
Gambar 4.4. Listing program keseluruhan
Gambar 4.5. Uji coba alat dengan memberikan input pada sensor infrared
Gambar 4.6. Uji coba alat dengan menekan tombol 5 pada keypad
Gambar 4.7. Uji coba alat dengan menekan tombol 2 pada keypad
Gambar 4.8. Uji coba alat dengan menekan tombol 8 pada keypad
Gambar 4.9. Uji coba alat dengan menekan tombol 1, 4, 7 pada keypad
Gambar 4.10. Uji coba alat dengan menekan tombol 3, 6, 9 pada keypad
DAFTAR TABEL
Tabel 2.1. Tabel baca resistor
Table 2.2. Bahan dielektrik yang di sederhanakan
Tabel 2.3.Karakteristik IC regulator tegangan positif
Table 4.1. Pola pemberian pada driver motor DC L293
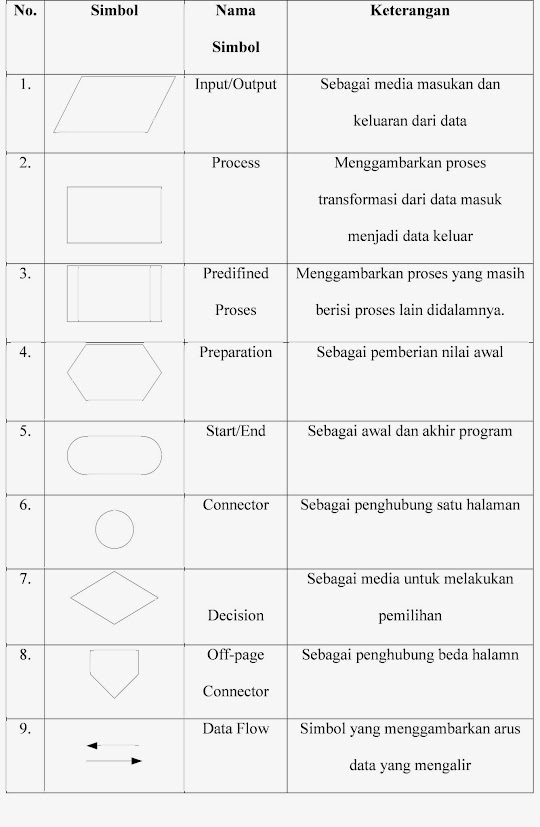
DAFTAR SIMBOL
SIMBOL FLOWCHART ( DIAGRAM ALIR )
SIMBOL ELEKTRONIKA

DAFTAR LAMPIRAN
1.Kartu Bimbingan Skripsi Perguruan Tinggi Raharja
2.Pergantian Judul
3.File Presentasi
4.Katalog Produk
5.Curriculum Vitae
DAFTAR ISI
COVER DEPAN
LEMBAR PENGESAHAN
LEMBAR PERSETUJUAN PEMBIMBING
LEMBAR PERSETUJUAN DEWAN PENGUJI
LEMBAR KEASLIAN SKRIPSI
ABSTRAKSI
KATA PENGANTAR
DAFTARGAMBAR
DAFTAR TABEL
DAFTAR SIMBOL
DAFTAR LAMPIRAN
DAFTAR ISI
BAB I PENDAHULUAN
1.1 Latar Belakang
1.2.Rumusan Masalah
1.3.Ruang Lingkup
1.4.Tujuan dan Manfaat
1.4.1. Tujuan
1.4.2. Manfaat
1.5.Metodologi Penelitian
1.6.Sistematika Penulisan
BAB II LANDASAN TEORI
2.1.Teori Umum
2.1.1. Konsep Dasar Sistem
2.1.2. Konsep Dasar Pengontrolan
2.2. Teori Khusus
2.2.1. Mikrokontroller
2.2.2. Mikrokontroller ATmega328
2.2.3. Driver Motor DC IC L293D
2.2.4. Keypad Membrane 4x3
2.2.5. Sensor Infrared
2.2.6. Motor Servo
2.2.7. Motor DC
2.2.8. Komponen Elektronika
1. Lampu led
2. Resistor
3. Kapasitor
4. Kristal
5. IC regulator
6. Tombol reset
2.2.9. Literrature Riview
BAB III PERANCANGAN PEMBAHASAN
3.1. Konsep Perancangan Dan Pembahasan
3.2. Perancangan Perangkat Keras (Hardware)
3.2.1. Rangkaian sistem minimum ATmega328
3.2.2. Rangkaian power supply
3.2.3. Rangkaian keypad membrane 4x3
3.2.4. Rangkaian lampu led
3.2.5. Rangkaian motor servo
3.2.6. Rangkaian sensor Infrared
3.2.7. Rangkaian motor DC
3.2.8. Rangkaian sistem keseluruhan
3.3. Konsep Perancangan Perangkat Lunak (Software)
3.3.1. Penulisan listing program Bahasa C
3.3.2. Pengisian program ke dalam IC ATmega328
3.4. Diagram alur sistem keseluruhan
BAB IV UJI COBA DAN ANALISA
4.1. Uji Coba
4.1.1. Pengujian rangkaian catu daya
4.1.2. Pengujian rangkaian keypad membrane
4.1.3. Pengujian rangkaian pengendali motor DC
4.1.4. Pengujian rangkaian mikrokontroller dan motor servo
4.1.5. Pengujian rangkaian mikrokontroller dan sensor infrared
4.2. Analisa listing program pada alat akses kontrol kendaraan bermotor
4.2.1. Penjelasan struktur listing program
4.3. Uji coba alat akses kontrol kendaraan bermotor
1. Uji coba dengan memberikan inputan pada sensor infrared
2. Uji coba dengan menekan tombol 5 pada keypad
3. Uji coba dengan menekan tombol 2 pada keypad
4. Uji coba dengan menekan tombol 8 pada keypad
5.Uji coba dengan menekan tombol 1, 4, 7 pada keypad
6. Uji coba dengan menekan tombol 3, 6, 9 pada keypad
BAB V PENUTUP
5.1.Kesimpulan
5.2.Saran
DAFTAR PUSTAKA
LAMPIRAN
Daftar isi
- 1 BAB I
- 2 BAB II
- 3 BAB III
- 4 BAB IV
- 4.1 4.1. Uji Coba
- 4.2 Analisa listing program pada alat akses kontrol kendaraan bermotor
- 4.3 Uji coba alat akses kontrol kendaraan bermotor
- 4.3.1 Uji coba dengan memberikan inputan pada sensor infrared
- 4.3.2 Uji coba dengan menekan tombol 5 pada keypad
- 4.3.3 Uji coba dengan menekan tombol 2 pada keypad
- 4.3.4 Uji coba dengan menekan tombol 8 pada keypad
- 4.3.5 Uji coba dengan menekan tombol 1, 4, 7 pada keypad
- 4.3.6 Uji coba dengan menekan tombol 3, 6, 9 pada keypad
- 5 BAB V
- 6 DAFTAR PUSTAKA
- 7 VIDEO ALAT
BAB I
PENDAHULUAN
Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi pada masa sekarang terus diikuti oleh sebagian bahkan hampir semua kalangan. Tidak lepas dari hal yang di atasperkembangan sistem yang umumnya berbasis komputer dan sistem terkontrol yangmenggunakan mikrokontroller sudah sangat maju.
Seiring dengan perkembangan teknologi tersebut, peranan peralatan komunikasi dan peralatan Kontrol sebagai penunjang dalam peningkatan produksi dalam suatu industri semakin besar. Pengontrolan peralatan elektronika telah menghasilkan metode yang sangat maju seiring dengan perkembangan teknologi. Dengan kemajuan teknologi tersebut pada era sekarangini komunikasi bukan hanya digunakan untuk komunikasi antar sesama manusia saja, melainkan antara manusia dengan alat-alat kontrol, seperti sistem akses mesin kendaraan bermotor roda empat menggunakan password dan sensor infrared berbasis mikrokontroller . perlunya pemahaman tentang komponen-komponen elektronika sangat dibutuhkan. Pada perancangan embedded system ini juga digunakan untuk mengakses mesin kendaraan bermotor rodaempat menggunakan password dan sensor infrared.
Pada perkembangan teknologi sekarang sudahberbagai jenis sistem kontrol yang dapat kita rancang, khususnya pada penggunaan password dan sensor infrared untuk melakukan akses mesin dan mengontrol kendaraan yang tentu tidaksembarang orang dapat mengakses mesin dan mengontrol kendaraan tersebut. Dengan mengunakan metode seperti ini sehingga akan dapat mengatasi kasus kehilangan kendaraan.
Adapun keuntungan yang didapatkan dengan menggunakan teknologi akses kontrol menggunakan password dan sensor infrared adalah agar dapat merancang kendaraan di masa mendatang.
Pada era sekarang ini akses dan mengontrol kendaraan harus perlu jaga dengan baik keamanannya dan tidak sembarang orang yangdapat mengakses mesin dan mengotrol kendaraan tersebut karena sudah menggunakan metode password akses sedangkan sensor infrared berfungsi untuk mendeteksi objek lain yaitu kendaraan yang lain sehingga kendaraan bermotor dapat dengan sendirinya dapat menghidar ketika ada kendaraanlain didepannya. Sehingga hanya orang – orang tertentu yang dapat mengetahui password untuk mengakases dan mengontrol kendaraan tersebut.
Adapun keuntungan yang didapatkan dengan menggunakan teknologi digital dengan metode password akses dan sensor infrared adalah teratasinya permasalahan – permasalahan yang dihadapi saat ini yaitu kasus perusakan terhadap kunci kontak kendaraan sehingga kasus kehilangan kendaraan tersebut sangat sulit di telusuri dan kelalain seorang pengemudi kendaraan bermotor roda empat. Kelebihan dari alatini adalah saat pertama kali untuk menghidupkan mesin kendaraan harus menggunakan password dan untuk pengontrolan pun baik untuk maju, mundur, belok kanan dan belok kiri harus menggunakan password tersendiri dan sensor infrared digunakan sebagai pendeteksi kendaraan di depannya.
Rumusan Masalah
Berdasarkan latar belakang di atas, maka permasalahan tersebut dapat di rumuskan sebagai berikut:
1. Bagaimana membuat sistem akses mesin dan mengontrol kendaraan bermotor roda empat menggunakan metode password akses dan sensor infrared berbasis mikrokontroller ATmega328.
2. Bagaimana membuat sistem kontrol yang bisadi manfaatkan juga sebagai keamanan kendaraan bermotor roda empat.
3. Bagaimanamembuat sistem kontrol kendaraan bermotor roda empat dengan berbagai password akses.
4. Bagaiamana membuat sistem yang mudahdan aman ketika pada saat mengendarai.
Ruang Lingkup
Berdasarkan rumusan masalah diatas, maka dapat diarahkan pada perancangan dan pembuatan sebuah alat yang diakses melalui password dansensor infrared sebagai pendeteksi objek menggunakan mikrokontroller ATmega328 serta komponen pendukung sistem meliputi:
1. Menggunakan mikrokontroller ATmega328.
2. Motor servo digunakan sebagai penggerak arah belokan.
3. Sensor infrared berfungsi sebagai pendeteksi objek.
4. Menggunakan motor DC sebagai penggerak mesin.
5. Untuk mengakses atau mengontrol alat menggunakan keypad membrane 4x3.
6. Lampu led digunakan untuk lampu indikator.
Tujuan Dan Manfaat
1.4.1. Tujuan
Tujuan pokok dari penelitian ini adalah sebagai berikut untuk menjelaskan pokok – pokok permasalahan yang masih menggunakan cara konvesional,menerangan berbagai teori yang telah di dapatkan serta merealisasikan sistem untuk mengakses dan mengontrol kendaraan dengan menggunakan metode password akses dan sensor infrared sebagai pendeteksi objek yang berbasis mikrokontroller ATmega328. Sistem ini juga dapat dibuat dengan tujuan sebagai alat security kendaraan bermotor sehingga dapat memberikan keamanan yang lebih terhadap kendaraan.
1.4.2.Manfaat
Adapun manfaat yang dihasilkan dari penelitian ini adalah :
1.Dapat memberikan jaminan pengamanan lebih untuk kendaraan bermotor roda empat.
2. Dapat mengurangi kasus kehilangan kendaraan bermotor roda empat.
3.dengan menggunakan metode password akses dansensor infrared sebagai pendeteksi objek, hanya orang-orang tertentu yang dapat menggunakan kendaraan roda empattersebut.
Metodologi Penelitian
Dalam melakuan penelitian terhadap alat ini maka metode yang penulis gunakan adalah:
Metode ini dilakukan untuk mencari dan mendapatkan sumber-sumber kajian landasan teori yang mendukung. Informasi yang dikumpulkan dapat dijadikan sebagai acuan untuk melakukan perencanaan,percobaan, pembuatan, dan penyusunan laporan.
2. Metode Perancangan
Metode ini dimaksudkan untuk menghasilkan suatu sistem rangkaian yang dapat bermanfaat, sehingga diperoleh hasil rancangan yang sesuai dengan yang diinginkan.
3. Pengujian Alat
Metode ini dimaksudkan untuk mengidentifikasikan masalah-masalah pada sistem yang telah ada dan mencari solusi bagaimana membuat sistem sesuai dengan yang diharapkan tidak ada kesalahan sehingga akan sesuai dengan apa yang dirancang.
4. Pengambilan Kesimpulan
Metode ini dilakukan dalam perencanaan, pembuatan dan pengujian alat sehingga didapatkan alat yang benar-benar sesuai dengan yang dirancang.
Sistematika Penulisan
Untuk memudahkan dalam memahami masalah yang akan diungkapkan, maka penulisan skripsi ini dibagi menjadi lima bab dan beberapa lampiran dengan sistematika yang tersusun sebagai berikut:
A. BAB I PENDAHULUAN
Pada bab ini berisi tentang latar belakang masalah, tujuan dan manfaat penelitian, ruang lingkup, metodologi penelitian dan sistematika penulisan.
B. BAB II LANDASAN TEORI
Bab ini berisi tentang uraian mengenai teori-teori dasar elektronika yang akan mendukung pembahasan, serta penulisan dalam penyusunan skripsi ini. Uraian tersebut menjelaskan tentang konsep dasar mikrokontroller ATmega328, keypad membrane 4x3, motor DC, lampu led dan komponen-kompenen pendukung lainnya.
C. BAB III PERANCANGAN SISTEM
Pada bab ini merupakan pembahasan laporan penulisan skripsi, yang berisi tentang : Analisa blok rangkaian, fungsi diagram blok rangkaian yang didalamnya meliputi : Unit pengendali, catu daya, prosedur sistem pengontrolan, konfigurasi sistem dan flowchart program serta sistem yang dibuat.
D. BAB IV PENGUJIAN DAN IMPLEMENTASI
Bab ini berisi tentang merupakan penjelasan mengenai uji coba serta analisa pengoperasian dari sistem yang dibuat.
E. BAB V PENUTUP
Berisi tentang kesimpulan dan saran yang diberikan dari hasil pengamatan dan penelitian yang telah dilakukan.
DAFTAR PUSTAKA
LAMPIRAN
BAB II
LANDASAN TEORI
Teori Umum
Konsep Dasar Sistem
Menurut Sutarman (2012:13), “Sistem adalah kumpulan elemen yang saling berhubungan dan berinteraksi dalam satu kesatuan untuk menjalankan suatu proses pencapaian suatu tujuan utama”.
Menurut Diana danSetiawati ( 2011 : 3 ), “Sistem adalah serangkaian bagian yang salingtergantung dan bekerjasama untuk mencapai tujuan tertentu”.
MenurutMustakini (2009:34), “Sistem dapat didefinisikan dengan pendekatan prosedur danpendekatan komponen, sistem dapat didefinisikan sebagai kumpulan dariprosedur-prosedur yang mempunyai tujuan tertentu”.
MenurutJerry Fithgerald (2009 : 2), “Sistem adalah suatu jaringan kerja dariprosedur-prosedur yang saling berhubungan, berkumpul bersama-sama untukmelakukan suatu kegiatan atau menyelesaikan suatu sasaran tertentu”.
Menurut Mulyanto (2009:1), “Secaraumum, sistem dapat diartikan sebagai kumpulan dari elemen-elemen yangberinteraksi untuk mencapai suatu tujuan tertentu sebagai suatu kesatuan”.
MenurutMulyanto (2009:2), “dalam bidang sistem informasi, sistem diartikan sebagaisekelompok komponen yang saling berhubungan, bekerja sama untuk mencapai tujuanbersama dengan menerima input seta menghasilkan input dalamproses transformasi yang teratur”.
Berdasarkan beberapa definisisistem yang dikemukakan di atas dapat ditarik kesimpulan bahwa sistem adalahsekumpulan komponen atau elemen yang berkerja sama sesuai fungsinya dan salingberhubungan untuk mencapai suatu tujuan.
Karakteristik Sistem
Menurut Mulyanto (2009:2), Suatu sistem mempunyai beberapa karakteristik, yaitu:
a. Komponen Sistem (components system)
Suatu sistem tidakberada dalam lingkungan yang kosong, tetapi sebuah sistem berada dan berfungsidi dalam lingkungan yang berisi sistem lainnya. Suatu sistem terdiri darisejumlah komponen yang saling berinteraksi, bekerja sama membentuk satukesatuan. Apabila suatu sistem merupakan salah satu dari komponen sistem lainyang lebih besar, maka akan disebut subsystem, sedangkan sistem yang lebih besar tersebut adalahlingkungannya. Setiap subsistem mempunyai sifat-sifat dari sistem untukmenjalankan suatu fungsi tertentu dan memengaruhi proses sistem secarakeseluruhan. Suatu sistem dapat mempunyai suatu sistem yang lebih besar yangdisebut super sistem. Sebagai contoh apabila fakultas dianggap sebuah sistem,maka perguruan tinggi merupakan super sistem.
b. Batasan Sistem (boundary)
Batas sistem merupakan pembatas ataupemisah antara suatu sistem dengan sistem yang lainnya atau dengan lingkunganluarnya. Batas system menentukan konfigurasi, ruang lingkup, atau kemampuansistem. Batas sistem ini memungkinkan suatu sistem dipandang sebagai suatukesatuan. Batas suatu sistem juga menunjukkan ruang lingkup (scope) darisystem tersebut.
c. Lingkungan Luar (environment)
Lingkungan luaradalah apa pun di luar batas dari sistem yang dapat mempengaruhi operasisistem, baik pengaruh yang menguntungkan ataupun yang merugikan. Pengaruh yangmenguntungkan ini tentunya harus dijaga sehingga akan mendukung kelangsunganoperasi sebuah sistem. Sedangkan lingkungan yang merugikan harus ditahan dandikendalikan agar tidak mengganggu kelangsungan sebuah sistem.
d. Penghubung Sistem (interface)
Penghubung merupakan hal yang sangat penting, sebabtanpa adanya penghubung, sistem akan berisi kumpulan subsistem yang berdirisendiri dan tidak saling berkaitan. Sebagai contoh, apabila di dalam perusahaanmemiliki beberapa sistem seperti produksi, finansial, pemasaran, dan HRD yangtidak memiliki penghubung satu sama lain tentu saja proses bisnis di dalamperusahaan tersebut tidak akan berjalan dengan semestinya. Penghubung (interface)merupakan media peghubung antara satu subsistem dengan subsistem yang lainnya.Penghubung inilah yang akan menjadi media yang digunakan data dari masukan (input)hingga keluaran (output). Dengan adanya penghubung, suatu subsistemdapat berinteraksi dan berintegrasi dengan subsystemyang lain yang membentuk satu kesatuan.
e. Masukan Sistem
Masukan atau input merupakanenergi yang dimasukan ke dalam sistem. Masukan dapat berupa masukan perawatan (maintenanceinput) dan masukan sinyal (signal input). Maintenance input adalahbahan yang dimasukan agar sistem tersebut dapat beroperasi. Signal input adalahmasukan yang diproses untuk mendapatkan keluaran. Sebagai contoh di dalamsistem komputer, program adalah maintenance input yang digunakanuntuk mengoperasikan komputernya dan data adalah signal input untukdiolah menjadi informasi. Contoh lain di dalam suatu perusahaan, karyawanmerupakan maintenance input yang akan mengoperasikan sistem tersebut,sedangkan data merupakan signal input yang akan diolah menjadiinformasi.
f. Keluaran Sistem
Keluaran (output)merupakan hasil dari pemrosesan. Keluaran dapat berupa informasi sebagaimasukan pada sistem lain atau hanya sebagai sisa pembuangan. Misalnya, dalamsistem pencernaan, energi merupakan keluaran yang dibutuhkan oleh sistem lain,sedangkan ampasnya merupakan sisa yang harus di buang.
g. Pengolahan Sistem
Pengolahan sistem (process)merupakan bagian yang melakukan perubahan dari masukan untuk menjadi keluaranyang diinginkan. Sistem pencernaan akan mengolah makanan menjadi energi. Sistemproduksi akan bahan mentah menjadi barang setengah jadi atau barang jadi. Dalamsistem informasi, pengolahan dapat berupa operasi penjumlahan, pengurangan,perkalian, pembagian, pengurutan, atau operasi lainnya yang nantinya akanmengubah masukan berupa data menjadi informasi yang berguna.
h. Sasaran Sistem
Suatu sistem pastimemiliki sasaran (objective) atau tujuan (goal). Apabila sistemmenjadi tidak mempunyai sasaran, maka operasi sistem tidak akan ada gunanya.Tujuan inilah yang mengarahkan suatu sistem. Tanpa adanya tujuan, sistemmenjadi tidak terarah dan terkendali. Tujuan sistem informasi tergantung padakegiatan yang ditangani. Secara umum suatu sistem memiliki tiga tujuan utama,yaitu:
1. Mendukung fungsi kepengurusan manajemen.
2. Mendukung pengambilankeputusan manajemen.
3. Mendukung kegiatanoperasi perusahaan.
Klasifikasi Sistem
Menurut Mulyanto (2009:8), Sistem dapat diklasifikasikan dari berbagai sudut pandan, di antaranya adalah sebagaiberikut:
a. Sistem Abstrak (Abstract System) dan Sistem Fisik (Physical System).
b. Sistem abstrak (abstract system) adalah sistem yang berupa pemikiran atau gagasan yang tidak tampak secara fisik.Misalnya, sistem teologi, yaitu sebuah pemikiran tentang hubungan antaramanusia dengan Tuhan.
c. Sedangkan sistem fisik (physical system) adalah sistem yang ada secara fisik dan dapat dilihat dengan mata. Misalnya sistem komputer, sistem akuntansi, sistemtransportasi, dan lain sebagainya.
a. Sistem Alamiah (Natural System) dan Sistem Buatan Manusia (Human ModeSystem).
1. Sistem alamiah (natural system) yaitu sistem yang terjadi melalui proses alam, tidakdibuat manusia. Misalnya perputaran bumi.
2. Sistem buatan manusia (human mode system) yaitu sistem yang dirancang oleh manusia. Sistembuatan manusia yang melibatkan interaksi antara manusia dengan mesin.
a. Sistem Tertentu (Deterministic System) dan Sistem TakTertentu (Probabilitas System)
1. Sistem tertentu melibatkanoperasi yang sudah dapat di duga dengan pasti, dapat dideteksi dan diramalkanhasil keluarannya, contohnya adalah sistem komputer dimana tingkah lakunyadapat diatur dengan baris-baris program yang dijalankan.
2. Sistem tak tentu (Probabilitas System) yaitu sistem yangtidak dapat diprediksikan kejadiannya, misalnya kejadian-kejadian dimasa yangakan datang merupakan hal rahasia dan tidak dapat diprediksikan karenamenyangkut unsur probabilitas.
a. Sistem Tertutup (Closed System) dan Sistem Terbuka (Opened System)
1. Sistemtertutup yaitu merupakan sistem yang tidak terpengaruh atau tidak tergangguoleh lingkungan luarnya. Karena bekerja secara otomatis tanpa campur tangan dari pihak luarnya. Walaupun tidak ada sistem yang benar-benar tertutup, yang adahanyalah sistem relatif tertutup (relativelyclosed system).
2. Sistem terbuka adalah sistemyang bekerja karena pengaruh dari pihak luarnya. Oleh karena itu perlu adanyasistem pengendalian yang dapat menjaga agar pengaruh tersebut hanya berupapengaruh yang baik saja.
Konsep Dasar Pengontrolan
Definisi Pengontrolan
Menurut Erinofiardi (2012:261), “Suatusystem control otomatis dalam suatu proses kerja berfungsi mengendalikan prosestampa adanya campur tangan manusia (otomatis)”.Kontrolotomatis mempenyai peran penting dalam dunia industri modern saat ini. Seiringperkembangan kemajuan ilmu pengetahuan dan teknologi, sistem kontrol otomatistelah mendorong manusia untuk berusaha mengatasi segala permasalahan yangtimbul di sekitarnya dengan cara yang lebih mudah, efisien dan efektif. Adanyakontrol otomatis secara tidak langsung dapat menggantikan peran manusia dalammeringankan segala aktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD)pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan,pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukantenaga ahli perencanaan sistem pengendali dan perancangan desain sistempengendali, termasuk teknisi profesional sebagai operator. Tidak menutup kemungkinanbahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungankarena teori sistem pengendali modern dikembangkan guna mengatasi kerumitanyang dijumpai pada berbagai system pengendalian yang menuntut kecepatan danketelitian yang tinggi dengan hasil output yang optimal. Dalam sistempengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan SistemPengendali Loop Tertutup ( Closed-loopControl System ).
Definisi Pengontrolan
Menurut Erinofiardi (2012:261), “Suatusystem control otomatis dalam suatu proses kerja berfungsi mengendalikan prosestampa adanya campur tangan manusia (otomatis)”.
Kontrolotomatis mempenyai peran penting dalam dunia industri modern saat ini. Seiringperkembangan kemajuan ilmu pengetahuan dan teknologi, sistem kontrol otomatistelah mendorong manusia untuk berusaha mengatasi segala permasalahan yangtimbul di sekitarnya dengan cara yang lebih mudah, efisien dan efektif. Adanyakontrol otomatis secara tidak langsung dapat menggantikan peran manusia dalammeringankan segala aktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD)pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan,pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukantenaga ahli perencanaan sistem pengendali dan perancangan desain sistempengendali, termasuk teknisi profesional sebagai operator. Tidak menutup kemungkinanbahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungankarena teori sistem pengendali modern dikembangkan guna mengatasi kerumitanyang dijumpai pada berbagai system pengendalian yang menuntut kecepatan danketelitian yang tinggi dengan hasil output yang optimal. Dalam sistempengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan SistemPengendali Loop Tertutup ( Closed-loopControl System ).
Jenis – Jenis Pengontrolan
A. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi (2012:261) sistem kontrol loop terbuka adalah ”suatu sistem kontrolyang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameterpengendalian.

Gambar 2.1. Sistem pengendaliloop terbuka
Sumber : Erinofiardi (2012:261)
Gambar diagram blok diatas menggambarkan bahwa didalamsistem tersebut tidak ada proses umpan balikuntuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugasdari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannyake alat terkendali.
B. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012:261) sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannyamemiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.”
Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yangdiumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.

Gambar 2.2. Sistem pengendali loop tertutup
Sumber : Erinofiardi (2012:261)
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat Terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal inputdihasilkan oleh mikrokontroler.
Teori Khusus
Mikrokontroller
Definisi Mikrokontroler
Menurut Sumardi(2013:1) [1], “Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendalidengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data”. Dari beberapa definisi-definisi diatas dapat disimpulkan bahwa Mikrokontroler adalah sebuah sistem mikroprosesor dalam chip tunggal yang dimana didalamnya terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya, dan juga mempunyai masukan dan keluaran serta kendali yang difungsikan untuk membaca data, dan dengan program yang bisa ditulis dan dihapus dengan cara khusus.
Karakteristik Mikrokontroler
Menurut Sumardi (2013:2)[1], mikrokontroler memiliki karakteristik sebagai berikut :
a. Memiliki program khusus yang disimpan dalam memori untuk aplikasi tertentu, tidak seperti PC yang multifungsi karena mudahnya memasukkan program. Program mikrokontroler relatif lebih kecil daripada program-program pada PC.
b.Konsumsi daya kecil.
c.Rangkaiannya sederhana dan kompak.
d. Harganya murah , karena komponennya sedikit.
e. Unit I/O yang sederhana, misalnya LCD, LED, Latch.
f. Lebih tahan terhadap kondisi lingkungan ekstrim, misalnya temperature tekanan, kelembaban, dan sebagainya.
g. Klasifikasi Mikrokontroler Menurut Malik dan Mohammad Unggul Juwana (2009:3), Mikrokontroler memiliki beberapa klasifikasi yaitu sebagai berikut:
1. ROM (Flash Memory) dengan kapasitas 1024 byte (1 KB).
2. RAM berkapasitas 68 byte.
3. EEPROM (memori data) berkapasitas 64 byte.
4. Total 13 jalur I/O (Port B 8 bit).
5. Timer/Counter 8 bit dengan prescaler.
6. Fasilitas pemrograman di dalam sistem (ICSP = In Circuit Serial Programming).
4. Fitur-fitur Mikrokontroler
Menurut Malik dan Mohammad Unggul Juwana (2009:3), ada beberapa fitur yang pada umumnya ada di dalam mikrokontroler adalah sebagai berikut : a. RAM (Random Access Memory)
RAM digunakan oleh mikrokontroler untuk tempat penyimpanan variable. Memori ini bersifat volatile yang artinya akan kehilangansemua datanya jika tidak mendapatkan catu daya.
b. ROM (Read Only Memory)
ROM disebut sebagai kode memori karena berfungsi untuk tempat penyimpanan program yang akan diberikan oleh user.
Register.
Register merupakan tempat penyimpanan nilai-nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroler.
d. Special Function Register.
Merupakan register khusus yang berfungsi untuk mengatur jalannya mikrokontroler dan register ini terletak di RAM.
E. Input dan Output Pin.
Pin Input adalah bagian yang berfungsi sebagai penerima signal dari luar dan pin inidihubungkan ke berbagai media inputanseperti keypad, sensor, keyboard, dan sebagainya. Pin Output adalah bagian yang berfungsiuntuk mengeluarkan signal dari hasil proses algoritma mikrokontroler.f. Interrupt.
Interrupt merupakan bagian dari mikrokontroler yangberfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika programsedang dijalankan, program tersebut dapat diinterupsikan dan menjalankanprogram interupsi terlebih dahulu.
Menurut Malik dan Mohammad Unggul Juwana (2009:3), ada beberapa interrupt yang terdapat pada mikrokontroler adalah sebagai beriku:
1. Interrupt Eksternal.
Interrupt ini akan terjadi ketika ada inputan dari pin interrupt.
2. Interrupt Timer.
Interrupt ini akan terjadi ketika waktu tertentu telah tercapai.
3. Interrupt Serial.
Interrupt ini akan terjadi ketika ada penerimaan data dari komunikasi serial.
Mikrokontroller ATmega328
1. Arsitektur Mikrokontroller ATmega328
Sebagai salah satu vendor besar didunia ini, ATMELmengeluarkan ATmega328 yang merupakan salah satu mikrokontroler yang banyakdigunakan. Mikrokontroler ATmega328 memiliki kompatibilitas penuh dengankeluarga MCS-51 lain, terutama pada bagian pemrogramannya dan mampu diprogramsecara In System Programming (ISP).[2]
MikrokontrolerATmega328 memiliki beberapa kriteria standardyaitu memiliki 32 KB Flash Programmable dan1 KB EEPROM yang dapat diprogramulang sekitar 1000 kali write atau erase cycle, 2 KB SRAM, 14 jalur I/O, 6pin analog, dua buah 16 bit timer/counter,dengan arsitektur lima vector, empat-level interrupt, full duplex serialport, on-chip oscillator dan onchiptimer/counter.
Mikrokontroler ATmega328 beroperasipada frekuensi clock sampai 16 Mhz.ATmega328 memiliki dua Power Saving Modeyang dapat dikontrol melalui software, yaituIdle Mode dan Power Down Mode. Pada IdleMode, CPU tidak aktif sedangkan isi RAM tetap dipertahankan dengan timer/counter, serial port dan interruptsystem tetap berfungsi. Pada PowerDown Mode, isi RAM akan disimpan tetapi osilatornya tidak akan berfungsisehingga semua fungsi dari chip akanberhenti sampai mendapat reset secarahardware.
2. Konfigurasi Pin ATmega328
Mikrokontroller merupakan sebuah processor yang digunakan untuk kepentingan kontrol. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan computer mainframe, mikrokontroller dibangun dari elemen – elemen dasar yang sama.Seperti umumnya komputer, mikrokontroller adalah alat yang mengerjakaninstruksi – instruksi yang diberikan kepadanya. Artinya, bagian terpenting danutama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuatoleh seorang programmer.
Program ini menginstruksikan komputer untuk melakukan tugas yang lebih kompleks yangdi inginkan oleh programmerkonfigurasi pin ATmega328 dapat dilihat pada gambar berikut:
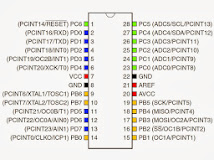
Gambar 2.3. Konfigurasi pin ATmega328
(Sumber: http://www.protostack.com/microcontrollers/atmega328-pu-atmel-8-bit-32k-avr-microcontroller)
Beberapa fitur yang umumnya ada di dalam mikrokontroller adalah sebagai berikut :
1.RAM ( Random Access Memory )
RAM digunakan oleh mikrokontroller untuk tempat penyimpanan variable. Memori ini bersifat volatile yang berarti akan kehilangan semua datanya jika tidak mendapatkan catu daya.
2. ROM ( Read Only Memory )
1. ROM seringkali disebut sebagai kode memori karena berfungsi untuk tempat penyimpanan program yang akan diberikan oleh user.
2. Register Merupakan tempat penyimpanan nilai – nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroller
3. Special Function Register Merupakan register khusus yang berfungsi untuk mengatur jalannya mikrokontroller. Register ini terletak pada RAM.
4. Input dan Output Pin
Pin input adalah bagian yang berfungsi sebagai penerima signal dari luar, pin ini dapat dihubungkan ke berbagai media inputan seperti keypad, sensor, dan sebagainya. Pin output adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma mikrokontroller.
5. Interrupt merupakan bagian dari mikrokontroller yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program utama sedang berjalan, program utamatersebut dapat diinterupsi dan menjalankan program interupsi terlebih dahulu.
6. Beberapa interrupt pada umumnya adalah sebagai berikut : ¾ Interrupt Eksternal.
a. Interrupt akan terjadi bila ada inputan dari pin interrupt ¾ Interrupt timer.
b. Interrupt akan terjadi bilawaktu tertentu telah tercapai ¾ Interrupt serial.
c. Interupt yang terjadi ketika ada penerimaan data dari komunikasi serial.
3. Fitur Mikrokontroller ATmega328
ATmega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC ( Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC ( Completed Instruction Set Computer).
a. Mikrokontroller ini memiliki beberapa fitur antara lain :
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM ( Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM ( Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM ( Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
b. Mikrokontroller ATmega328 memiliki arsitektur Harvard
Yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism.
1. Instruksi – instruksidalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satuinstruksi dikerjakan instruksi berikutnya sudah diambil dari memori program.Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalamsetiap satu siklus clock.
2. 32 x 8-bit register serba guna digunakan untuk mendukung operasipada ALU ( Arithmatic Logic unit )yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapatdigunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan taklangsung untuk mengambil data pada ruang memori data. Ketiga register pointer16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y (gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ).
3. Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamatmemori program terdiri dari instruksi 16-bit atau 32-bit. Selainregister serba guna di atas, terdapat register lain yang terpetakan denganteknik memory mapped I/O selebar 64 byte. Beberapa register inidigunakan untuk fungsi khusus antara lain sebagai register control Timer/Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register –register ini menempati memori pada alamat 0x20h – 0x5Fh.
Untuk mengetahui alur hubungan dari architecture ATmega328 dapat di lihatpada gambar berikut:

Gambar 2.4. Arsitektur ATmega328
(Sumber: http://duinoworks.bakketti.com/)
c. Memori
ATmega328 mempunyai 32 KB (dengan 0,5 KB digunakan untuk bootloader. ATmega 328 juga mempunyai 2 KB SRAM dan 1 KB EEPROM(yang dapat dibaca dan ditulis (RW/read and written) dengan EEPROM library).
d. Input dan Output
Setiap 14 pin digital padaATmega328 dapat digunakan sebagai input dan output,menggunakan fungsi pinMode(), digitalWrite(),dan digitalRead(). Fungsi-fungsi tersebutberoperasi di tegangan 5 Volt. Setiap pindapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuahresistor pull-up (terputus secara default) 20-50 kOhm. Selain itu.
Beberapa pin mempunyai fungsi-fungsi spesial:
1. Serial: 0 (RX) dan 1(TX). Digunakan untuk menerima (RX) dan memancarkan (TX) serial data TTL (Transistor-TransistorLogic). Kedua pin ini dihubungkan ke pin-pin yang sesuai dari chip Serial ATmega8U2 USB-ke-TTL.
2. External Interrupts: 2 dan 3. Pin-pin ini dapat dikonfigurasikan untukdipicu sebuah interrupt (gangguan) pada sebuah nilai rendah, suatu kenaikan atau penurunan yang besar, atau suatuperubahan nilai. Lihat fungsi attachInterrupt() untuk lebih jelasnya.
3. PWM: 3, 5, 6, 9, 10, dan 11. Memberikan 8-bit PWM output dengan fungsi analogWrite().
4. SPI: 10(SS), 11 (MOSI), 12 (MISO), 13 (SCK). Pin-pin ini mensupport komunikasi SPI menggunakan SPI library.
5. LED: 13. Ada sebuah LED yang terpasang, terhubung ke pin digital 13. Ketika pin bernilai HIGH LED menyala, ketika pin bernilai LOW LED mati.
ATmega328 mempunyai 6 input analog, diberi label A0 sampai A5, setiapnya memberikan 10 bit resolusi (contohnya 1024 nilai yang berbeda). Secara default, 6 input analog tersebut mengukur dari ground sampai tegangan 5 Volt, dengan itu mungkin untuk mengganti batas atas dari rangenya dengan menggunakan pin AREF dan fungsi analogReference(). Di sisi lain, beberapa pin mempunyai fungsi spesial:
a. TWI: pin A4 atau SDA dan pin A5 atau SCL. Mensupport komunikasi TWI dengan menggunakan Wire library
b. Ada sepasang pin lainnya pada board:
c. AREF. Referensi tegangan untuk inputanalog. Digunakan dengan analogReference().
d. Reset. Membawa saluran ini LOWuntuk mereset mikrokontroler. Secara khusus, digunakan untuk menambahkan sebuahtombol reset untuk melindungi yang memblocksesuatu pada board.
e. ATmega328 menyediakan serial komunikasi UART TTL(5V), yang tersedia pada pin digital 0 (RX) dan 1 (TX). Sebuah Atmega 16U2 padachannel board serial komunikasinya melaluiUSB dan muncul sebagai sebuah portvirtual ke software padakomputer. Firmware 16U2 menggunakan driver USB COM standar, dan tidak ada driver eksternal yang dibutuhkan.Bagaimanapun, pada Windows,sebuah file inf pasti dibutuhkan. SoftwareArduino mencakup sebuah serialmonitor yang memungkinkan data tekstual terkirim ke dan dari board Arduino. LED RX dan TX pada board akan menyala ketika data sedangditransmit melalui chip USB-to-serialdan koneksi USB pada komputer (tapi tidak untuk komunikasi serial pada pin 0 dan 1).
f. Sebuah SoftwareSerial library memungkinkanuntuk komunikasi serial pada beberapapin digital ATmega328.
g. ATmega328 juga mensupport komunikasi I2C (TWI) dan SPI. Software Arduino mencakup sebuah Wire library untuk memudahkan menggunakan bus I2C, Untuk komunikasiSPI, gunakan SPI library. ATmega328 Memerlukan Board Arduino Uno Sebagai bootloader yang memungkinkan kita untukmengupload kode baru ke ATmega328menggunakan pemrogram hardware eksternalyaitu Board Arduino Uno. ATmega328berkomunikasi menggunakan protokol STK500.
2.2.3. Driver Motor DC IC L293D
IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Amperetiap driver. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. konstruksi pin driver motor DC IC l293 dapat di lihat pada gambar 2.5 sebagai berikut.[3]

Gambar 2.5.Konstruksi pin dan rangkaian driver motor DC IC L293
(Sumber : http://chaokhun.kmitl.ac.th)
1. Fungsi pin driver motor DC IC L293D
a. Pin EN(Enable, EN1.2, EN3.4) berfungsiuntuk mengijinkan driver menerimaperintah untuk menggerakan motor DC.
b. Pin In (Input, 1A, 2A, 3A, 4A)adalah pin input sinyal kendali motorDC
c. Pin Out (Output, 1Y, 2Y, 3Y, 4Y)adalah jalur output masing-masing driver yang dihubungkan ke motor DC
d. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber teganganrangkaian kontrol driver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
e. Pin GND (Ground)adalah jalu yang harus dihubungkan ke ground,pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
2.2.4. Keypad Membrane 4x3
Salah satu jenis perangkat antar muka yang umum dijumpai pada sistem embedded adalah keypad matrik 3x4 atau 4x4. Keypad biasanya digunakan pada beberapaperalatan yang berbasis mikrokontroller. Pada penggunaannya keypad terdiri dari beberapa saklar, yang saling terhubung jika dilakukan penekanan pada bagian keypad sehingga antara kolom dan baris akan terhubung. Agar mikrokontroler dapat melakukan scan keypad harus di berikan logika LOW (“0”) ketika tombol keypad tidak ditekan dan logika HIGH (“1”) pada saat tombol keypad ditekan.[4]

Gambar 2.6.Keypad membrane 4x3
Keypad membrane yang digunakan adalah keypad dengan jumlah kolom 3 dan jumlah baris 4 yang dapat digunakan, rangkaian keypad 3x4 dapat dilihat pada gambar berikut:

Gambar 2.7. Konfigurasi pin output keypad 4x3
2.2.4. Sensor Infrared
Switch infrared sensor atau Adjustable infrared sensor adalah saklar atau sensor yang bekerja otomatis. Sensor IR atau infrared ini banyak digunakan sebagai aplikasi switch otomatis untuk aneka aplikasi.Sensor ini bekerja sebagai switch dengan jarak pengaktifan yang bisa diatur dari 3cm sampai 80cm lurus. dapat dipakai sebagai detektor pada robot untuk menghindari rintangan atau benda yang menghalangi sensor tersebut. Cara kerja sensor infrared pada dasarnya sama dengan cara kerja sensor pada umumnya, namun cara kerja sensor infrared dapat dilihat secara langsung ketika lampu dibelakan bagian sensor tidak menyala artinya sensor diberi kondisi LOW (“0”) dan ketika lampu dibagian belakang sensor menyala artinya sensor diberi kondisi HIGH (“1”).[5]

Gambar 2.8. Bentuk fisik sensor infrared
1. Spesifikasi
a. Jarak jangkau pembacaan sensor 3cm - 80cm
b. Biasanya banya digunakan untuk robot, media interaktif dan dunia industri
c. Power supply: 5V
1. Pinout
a. Red - V+
b. Yellow - Signal
c. Green - GND
2.2.6. Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalammotor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrolyang ada di dalam motor servo.

Gambar 2.9. Bentuk fisik motor servo standar
Sumber: http://elektronika-dasar.web.id
Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaiankontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu(axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya.
1. Jenis motor servo
a. Motor servo standar 180°Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengandefleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut darikanan – tengah – kiri adalah 180°.
b. Motor servo continuous Motor servo jenis ini mampubergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar(dapat berputar secara kontinyu).
Pulse kontrol motor servo operasional motor servo dikendalikan oleh sebuah pulseselebar ± 20 ms, dimana lebar pulse antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulse dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulse kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulse lebih dari 1.5 ms maka posisi mendekati 180°. Gambar pulse kendali motor servo dapat dilihat pada gambar 2.2 sebagai berikut:

Gambar 2.10. Pulsa kendali motor servo
Sumber: http://elektronika-dasar.web.id
Motor servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz.Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akanberputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadapbesarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.2.7. Motor DC
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Pada dasarnya energi ini digunakan untuk memutar benda benda yang ada di sekitar kita, seperti untuk memggerakkan fan/kipas , menggerakan kompresor, mengangkat bahan,dan masih banyak yang lainnya.[3]
Motor DC adalah jenis motor yang menggunakan tegangan DC (tegangan yang searah) sebagai sumber energi. Dengan memberikan tegangan yang berbeda di kedua terminal, motor akan berputar dalam satu arah, dan apabila polaritas tegangan dibalik maka arah putaran motor akan terbalik juga. Adapun motor DC terdiri dari dua bagian utama, yaitu:[6]
1. Stator merupakan bagianyang tetap / stasioner. Stator menghasilkan medan magnet, baik yang dihasilkandari sebuah kumparan (magnet elektro) atau magnet permanen.
2. Rotor yaitu bagian yang berputar.Rotor dalam bentuk coil di manasebuah arus listrik.
Adapun yang dapat diperhatikan dari DC Motor ini adalah polaritas dari teganganditerapkan pada dua terminal menentukan arah putaran motor, sedangkan perbedaanbesar pada kedua tegangan terminal menentukan kecepatan motor.
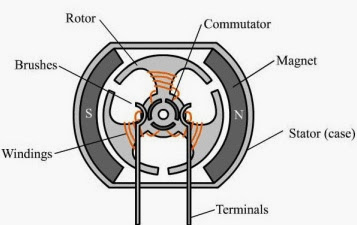
Gambar 2.11. Bagian dalam motor DC
Sumber: http://depokinstruments.com
1. Prinsip kerja motor DC
Cara kerja dari motor DC ini sangat sederhana, yaitu apabila terdapat arus yang melewatisuatu konduktor, timbul medan magnet di sekitar konduktor.
a. Arus listrik dalam medan magnet akan memberikan gaya.
b. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran / loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
c. Pasangan gaya menghasilkan tenaga putar/ torque untuk memutar kumparan.
d. Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medanmagnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan
Pada motor DC, medan magnet disini selain berfungsi sebagai tempat untuk menyimpan energi, sekaligus sebagai tempat berlangsungnyaproses perubahan energi, daerah kumparan, karena konversi dari energi listrikmenjadi energi mekanik (motor) maupun sebaliknya berlangsung melalui medan magnet, dengan demikian
2. Beban motor
Beban pada motor DC penting dideinisikandalam memahami sebuah motor listrik. Beban ini mengacu kepada output tenaga putar / torque sesuaidengan kecepatan yang diperlukan. Sampai saat ini jenis beban dikelompokkanmenjadi :
a. Beban torque konstan yaitu beban yang permintaan keluaran energinya bergantung terhadap kecepatanoperasinya , akan tetapi torquenya tidak bervariasi.
Contoh: beban dengan torque konstan adalah corveyors, rotarykilns, dan pompa displacement konstan.
b. Beban dengan variabel torque yaitubeban dengan torque yang bervariasi dengan kecepatn operasi.Contoh beban dengan variabel torque adalah pompa sentrifugaldan fan (torque bervariasi sebagai kuadratkecepatan).
Contoh: Peralatan Energi Listrik : Motor Listrik.
c. Beban dengan energi konstan yaituadalah beban dengan permintaan torque yang berubah danberbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstanadalah peralatan-peralatan mesin.
3. Bagian Atau Komponen Utama Motor DC
a. Kutub medan Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi ruang terbuka diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnetik.
b. Current Elektromagnet atau Dinamo. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi.
c. Commutator. Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk transmisi arus antara dinamo dan sumber daya.
Motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur: Tegangan dinamo meningkatkan tegangan dinamo akan meningkatkan kecepatan Arus medan menurunkan arus medan akan meningkatkankecepatan. Hubungan antara kecepatan, flux medan dan Tegangan dinamo dituntukan dalam persamaan berikut:
Gaya Elektromagnetik (E) E=K\Phi N Torque (T) : T=K\Phi I_{a} Dimana:
E = gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit)
T = torque electromagnetik
Ia = arus dinamo
K = konstanta persamaan
4. Jenis Motor DC
Adapun Motor DC dibedakan menjadi dua jenis, yaitu yang arus dan dayanya berasal dari sumber terpisah, dan motor yang memiliki sumber daya sendiri
a. Motor DC sumber daya Terpisah Excited Winding
Jika arus medan dipasok dari sumber terpisah maka disebut motor DC sumber daya terpisah/separately excited.
b. Motor DC sumber daya sendiri/ Self Excited
Pada jenis motor DC sumber daya sendiri di bagi menjadi 3 tipe sebagi berikut:
1. Shunt motor under load
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo Oleh karena itu total arus dalam jalurmerupakan penjumlahan arus medan dan arus dinamo.
2. Series motor
Motor seri identik dalam kosntruksi untuk motor shunt kecuali untuk field. Untuk field dihubungkan secara seri dengan armature, oleh karena itu, membawa arus armature seluruhnya. Field seri ini terdiri dari beberapa putaran kawat yang mempunyai penampang cukupbesar untuk membawa arus. Pada motor yang mempunyai hubungan seri jumlah arus yang melewati angker dinamo sama besar dengan yang melewati kumparan. Jika beban naik motor berputar makin pelan. Jika kecepatan motor berkurang maka medan magnet yang terpotong juga makin kecil, sehingga terjadi penurunan EMF(electromotive force).
2.2.8.Komponen Elektronika
1. Lampu led
Lampu LED atau kepanjangannya (light emitting diode) adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki fungsiuntuk menunjukkan status dari perangkat elektronika tersebut. Misalnya pada sebuah komputer, terdapat lampu LED power dan led indikator untuk processor, atau dalam monitor terdapat juga lampu led power dan power saving. Lampu led terbuat dari plastik dan dioda semikonduktor yang dapat menyala apabila dialiri tegangan listrik rendah(sekitar 1.5 volt DC). Bermacam-macam warna dan bentuk dari lampu led, disesuaikan dengan kebutuhan dan fungsinya. Bentuk fisik dari lampu led dapat dilihat pada gambar 2.12 sebagai berikut:

Gambar 2.12. Lampu led
Sumber : diambil dari marktechopto.com
A. Fungsi lampu led
Led (light emitting diode) merupakan sejenis lampu yang akhir-akhir ini muncul dalam kehidupan kita. Led dulu umumnya digunakan pada gadgetseperti ponsel serta komputer. Sebagai pesaing lampu bohlam dan neon, saat ini aplikasinya mulai meluas dan bahkan bisa kita temukan pada korek api yang kita gunakan, lampu emergency dan sebagainya. Led sebagai model lampu masa depan dianggap dapat menekan pemanasan global karena efisiensinya.
2.Resistor
Resistor atau tahanan adalah salah satu komponen elektronika yang berfungsi untuk mengatur serta menghambat arus listrik. Resistor adalah komponen dasar elektronika yang dipergunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Sesuai dengan namanya resistor bersifat resistif dan biasanya komponen ini terbuat dari bahan karbon. Berdasarkan hokum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Satuan resistansi dari suatu resistor disebut Ohm atau dilambangkan dengan simbol W(Omega). Untuk menghitung hambatan pada resistor dapat menggunakan rumus sebagai berikut:

Keterangan :
V = tegangan listrik (volt )
I = arus yang mengalir (ampere)
R = tahanan (ohm)
Untuk mengetahui nilai resistorberdasarkan warnanya dapat dilihat pada table 2.1 sebagai berikut:

Tabel baca resistor
Sumber: Rusmadi (2009:13)
Penjelasan dari kode warna resistor pada gambar 2.13 sebagai berikut:
Kode I, menyatakan angka ke satu
Kode II, menyatakan angka ke dua
Kode III, menyatakan faktor pengali
Kode IV, menyatakan nilai toleransi atau batas antara nilai tahanan terbesar dengan nilai tahanan yang terkecil.
Misalkan diketahui warna tahanan terdiri dari merah-hijau-orange-emas, berarti nilai resistansinya = 25.000 ohm ± 5% = 25 K ohm ± 5%
Nilai maksimal dari resistansinya = 25.000 + (25.000 X 5%)= 26.250 ohm.
Nilai maksimal dari resistansinya = 25.000 - (25.000 X 5%) = 26.250 ohm.
Menurut macamnya resistor terbagi atas dua macam yaitu:
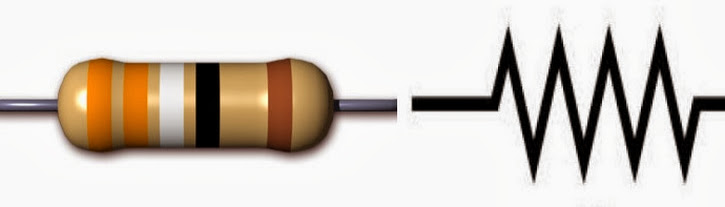
Gambar2.13. Bentuk fisik dan simbol resistor tetap
1. Resistor Tidak Tetap (Variable Resistor) Ialah resistor yang nilaihambatannya atau resistansinya dapat diubah-ubah. Jenisnya antara lain : hambatan geser, trimpot dan potensiometer. Yangbanyak digunakan ialah trimpot dan potensimeter.
a. Tahanan Variabel adalah jenis tahanan yang resistansinya bisadiubah-ubah, seperti Potensiometer dengan cara diputar dan Trimpot (trimer potensiometer).
b. LDR (Light Dependent Resistance) adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahayadan membesar apabila tidak terkena cahaya.
c. NTC (negative thermal coeffisien) dan PTC (positivethermal coeffisien) adalah jenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC pada suhu yangtinggi nilai tahanannya turun dan pada suhu yang rendah nilai tahananya naik, sedangkan PTC kebalikannya pada suhu yang tinggi nilai tahanannya naik dan pada suhu yang rendah nilai tahanannya turun.
Adapun resistor tidak tetap dapat dilihat seperti pada gambar 2.15sebagai berikut:

Gambar 2.14. Bentuk fisik dan simbol resistor tidak tetap
3. Kapasitor
Kapasitor adalah komponen elektronika yang mempunyai kemampuan menyimpan electron-elektron selama waktu yang tidak tertentu. Kapasitor berbeda dengan akumulator dalam menyimpan muatan listrik terutama tidak terjadi perubahan kimia pada bahan kapasitor, besarnya kapasitansi dari sebuah kapasitor dinyatakan dalam farad.[7]
Pengertian lain kapasitor adalah komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas, elektrolit danlain-lain.
Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satukaki (elektroda) metalnya dan padasaat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi.Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknyamuatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah olehbahan dielektrik yang non-konduktif.
Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung-ujungkakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuatdengan kapasitansi atau kapasitas. Untuk melihat kontruksi dari kapasitor,dapat dilihat pada gambar 2.16 sebagai berikut:

Gambar 2.15. Susunan lapisan kapasitor
Kapasitansi didefenisikan sebagai kemampuan dari suatu kapasitor untuk dapat menampung muatan elektron. Coulombs pada abad 18 menghitung bahwa 1 coulomb = 6.25 x 1018 elektron. Kemudian Michael Faraday membuat postulat bahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1 farad jika dengan tegangan 1 volt dapat memuat muatan elektron sebanyak 1 coulombs. Dengan rumus dapat ditulis :
Q = CV
Dimana :
Q = muatan elektron dalam C (coulomb)
C = nilai kapasitansi dalam F (farad)
V = besar tegangan dalam V (volt)
Dalam praktek pembuatan kapasitor,kapasitansi dihitung dengan mengetahui luas area plat metal (A), jarak (t)antara kedua plat metal (tebal dielektrik)dan konstanta (k) bahan dielektrik. Dengan rumusan dapat ditulis sebagaiberikut :
C = (8.85 x 10-12) (k A/t)
Contoh konstanta (k) dari beberapa bahan dielektrik yang disederhanakan dapat dilihat pada tabel 2.2 sebagai berikut:
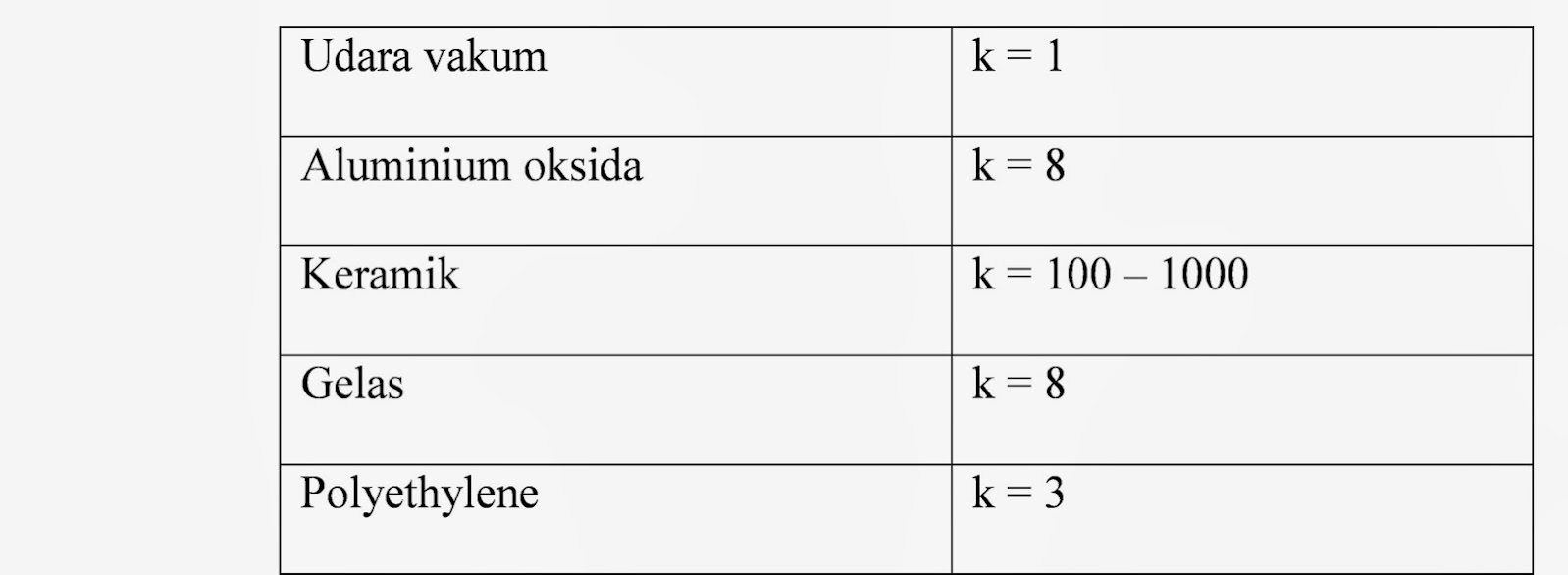
Tabel 2.2. Bahan dielektrik yang di sederhanakan
a. Prinsip PembentukanKapasitor
1. Jika dua buah plat atau lebih yang berhadapan dan dibatasi olehisolasi, kemudian plat tersebut dialiri listrik maka akan terbentuk kondensator(isolasi yang menjadi batas kedua plat tersebut dinamakan dielektrikum).
2. Bahan dielektrikum yangdigunakan berbeda-beda sehingga penamaan kapasitor berdasarkan bahan dielektrikum. Luas plat yang berhadapanbahan dielektrikum dan jarak keduaplat mempengaruhi nilai kapasitansinya.
3. Pada suatu rangkaian yang tidak terjadi kapasitor liar. Sifat yangdemikian itu disebutkan kapasitansi parasitic.Penyebabnya adalah adanya komponen-komponen yang berdekatan pada jalurpenghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan.

Gambar 2.16. Lapisan dalam kapasitor
Sumber: http://elektronika-dasar.web.id
Gambar 2.17 diatas menunjukan bahwa ada dua buah plat yang dibatasi udara. Jarak kedua plat dinyatakan sebagai d dantegangan listrik yang masuk. Besaran Kapasitansi Kapasitas dari sebuah kapasitor adalah perbandingan antara banyaknya muatanlistrik dengan tegangan kapasitor dapat ditulis menggunakan rumus sebagai berikut:
C = Q / V
Jika dihitung dengan rumus C= 0,0885D/d. Maka kapasitasnya dalam satuan pikofarad.
D = luas bidangplat yang saling berhadapan dan saling mempengaruhidalam satuan cm2.
Dalam kenyataannya kapasitor dibuat dengan satuan dibawah 1 farad. Kebanyakan kapasitor elektrolit dibuat mulai dari 1 mikrofarad sampai beberapa milifarad.
b. Jenis-jenis kapasitor sesuai bahan dan konstruksinya.
Kapasitor sepertijuga resistor nilai kapasitansinya ada yang dibuat tetap dan ada yang variabel.Kapasitor dielektrikum udara,kapasitansinya berubah dari nilai maksimum ke minimum. Kapasitor variabel sering kita jumpai padarangkaian pesawat penerima radio dibagian penala dan osilator. Agar perubahankapasitansi di dua bagian tersebut serempak maka digunakan kapasitor variabelganda. Kapasitor variabel ganda adalah dua buah kapasitor variabel dengan satu pemutar. Berdasarkan dielektrikum kapasitor dibagi menjadi beberapa jenis, antara lain:
1. kapasitor keramik
2. kapasitor film kapasitor elektrolit
3. kapasitor tantalum
4. kapasitor kertas
Berdasarkanpolaritas kutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu :
1. Kapasitor Non-Polar, kapasitor yang tidak memiliki polaritas pada keduaelektroda dan tidak perlu dibedakan kaki elektrodanya dalam pesangannya padarangkaian elektronika.
2. Kapasitor Bi-Polar, yaitu kapasitor yang memiliki polaritas positif dannegatif pada elektrodanya, sehingga perlu diperhatikan pesangannya padarangkaian elektronika dan tidak boleh terbalik. Kapasitor elektrolit dankapasitor tantalum adalah kapasitor yang mempunyai kutub atau polar, seringdisebut juga dengan nama kapasitor polar. Kapasitor film terdiri dari beberapajenis yaitu polyester film, poly propylene film.
4. Kristal
Berfungsi untuk menghasilkan sinyaldengan tingkat kestabilan frekuensi yang sangat tinggi. Kristal pada oscilator ini terbuat dari quartz atau Rochelle salt dengan kualitas yang baik. Material ini memilikikemampuan mengubah energi listrik menjadi energi mekanik berupa getaran atausebaliknya. Kemampuan ini lebih dikenal dengan piezoelectric effect.
[8]
Gambar 2.17. Rangkaian internal kristal
Sumber: http://elektronika-dasar.web.id
Pada oscilator, kristal yang berfungsi sebagai rangkaian resonansi seri,kristal seolah-olah memiliki induktansi (L), kapasitansi (C) dan resistansi(R). Nilai L ditentukan oleh massa kristal, harga C ditentukan olehkemampuannya berubah secara mekanik dan R berhubungan dengan gesekan mekanik.Berikut adalah contoh oscilatormenggunakan tank cirkuit kristalsebagai resonansi seri.
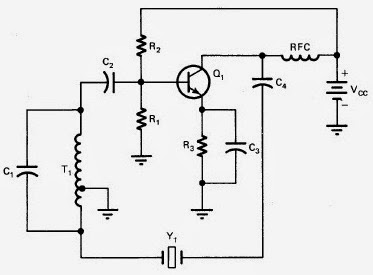
Gambar 2.18. Rangkaian oscilator hartley dengan kristal
Sumber: http://elektronika-dasar.web.id
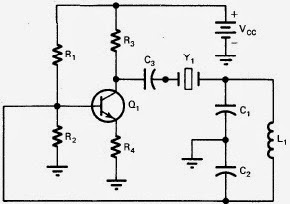
Gambar 2.19. Rangkaian oscilator colpitts dengan kristal
Sumber: http://elektronika-dasar.web.id
Kristal ini dapatdioperasikan pada rangkaian tangki dengan fungsi sebagai penghasil frekuensi resonansi paralel. Kristal sendiri dapat dioperasikan sebagai rangkaian tangki. Jika kristal diletakkan sebagai jaringan umpan balik, kristalakan merespon sebagai piranti penghasil resonansi seri. Kristal sebenarnya merespon sebagai tapis yang tajam. Kristal dapat difungsikan sebagai umpanbalik pada suatu frekuensi tertentu saja. Oscilator hartley dan colpitts dapat dimodifikasi dengan memasang kristal ini. Stabilitas oscilator akan meningkat dengan pemasangan kristal.
5. IC regulator
Salah satu tipe regulator tegangan tetap adalah 78XX. Regulator tegangan tipe 78XX adalah salah satu regulator tegangan tetap dengan tiga terminal, yaitu terminal VIN, GND dan VOUT. Tegangan keluaran dari regulator 78XX memungkinkan regulator untuk dipakai dalam sistem logika, instrumentasi dan Hifi. Regulator tegangan 78XX dirancang sebagai regulator tegangan tetap, meskipun demikian dapat juga keluaran dari regulator ini diatur tegangan dan arusnya melalui tambahan komponen eksternal. Pada umumnya catu daya selalu dilengkapi dengan regulator tegangan. Tujuan pemasangan regulator tegangan pada catu daya adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan adalah untuk perlindungan dari terjadinya hubung singkat pada beban.
Untuk melihat karakteristik regulator tegangan positif 78xx dapat dilihat pada tabel 2.3 sebagai berikut:

Tabel 2.3. Karakteristik IC regulator tegangan positif 78xx
Sumber: http://elektronika-dasar.web.id
Angka xx pada bagianterakhir penulisan tipe regulator78xx merupakan besarnya tegangan outputdari regulator tersebut. Kemudianhuruh L, M merupakan besarnya arus maksimum yang dapat dialirkan pada terminal output regulator tegangan positif tersebut. Untuk penulisan tanpa huruf Lataupun M (78(L/M)xx) pada regulatortegangan positif 78xx maka arus maksimal yang dapat dialirkan pada terminal outputnya adalah 1 ampere. Karakteristik dan tipe-tipe kemampuan arus maksimal output dari regulator tegangan positif 78xx dapat dilihat pada tabel diatas.Kode huruf pada bagian depan penulisan tipe regulator78xx merupakan kode produsen (AN78xx, LM78xx, MC78xx) regulator tegangan positif 78xx. Cara pemasangan dari regulatortegangan tetap 7805pada catu daya dapat dilihat pada gambar 2.21 sebagai berikut.[9]

Gambar 2.20. Rangkaian dasar IC regulator tegangan positif 78xx
Sumber: http://elektronika-dasar.web.id
1. Penggunaan IC regulator dalam rangkaian
IC 7805 merupakan IC peregulasi,dimana IC 7805 bekerja pada sumber arus searah yang menghasilkan keluaran 5 volt sedangkan pada rangkaian IC inidigunakan untuk memaksa keluaran yang kita berikan diatas 5 volt menjadi 5 volt dengan hasil positif, sesuai dengan data IC 7805 bekerja efektif antara range 7V-20V. IC 7805 terdapat beberapa macam mulai dari komponen SMD (surface mount device) sampai aplikasi umum dengan keluaran arus sampai dengan 1A.

Gambar 2.21. Rangkaian IC regulator
6. Tombol reset
Proses reset merupakan proses untuk mengembalikan sistem ke kondisi semula. Power-on reset merupakan peroses reset yangberlangsung secara otomatis pada saat sistem pertama kali diberi daya. pinreset juga dapatdiberi rangkaian manual reset.beberapa rangkaian yang umum digunakanterdapat pada gambar 2.23 pemberian rangkaianini membuat sistem dapat di-reset oleh user setiap saatdengan menekan tombol reset.

Gambar 2.22. Rangkaian power-on reset
2.2.9. Literrature Riview
Menurut Guritno, Sudaryono dan Untung Rahardja (2010:86), “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawabanuntuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporanhasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama. Beberapa Literaturereview tersebut adalah sebagai berikut:
1. Penelitian yang dilakukan oleh Moch Firmansyah dari Perguruan Tinggi Raharja yang berjudul “Akses Ruangan Digitally Synthesizer Laboratory ( DSL ) Dengan Menggunakan Metode MPP ( Microcontroller Password Protection )” menggunakan mikrokontroler AT89S205 pada tahun 2009.
2. Penelitian yang dilakukan oleh Fitri Apriyani dari PERGURUAN TINGGI RAHARJA yang berjudul “Sistem Keamanan Pintu Menggunakan Password Berbasis Mikrokontroller AT89S51 pada tahun 2013.
3. Penelitian yang dilakukan oleh Satriyo Budi Santoso dari Perguruan Tinggi Raharja yang berjudul “Perancangan Miniatur PalangPerlintasan Kereta API Menggunakan Infrared dan Mikrokontroller AT89S51 Pada PT.KAI pada tahun 2013.
4. Penelitian yang dilakukan oleh Achmad Raka Prisany dari Perguruan Tinggi Raharja yang berjudul “ Alat Palang Pintu Kereta Api Otomatis Menggunakan Sensor Infra merah Berbasis Mikrokontroller Arduino pada tahun 2013.
5. Penelitian yang dilakukan oleh Riyan Saputra dari Perguruan Tinggi Raharja yang berjudul “Pengontrolan Peralatan Rumah Dengan Menggunakan Mikrokontroller AT89S51 dan Remote Inframerah pada tahun 2013.
Dari beberapa sumber literature review di atas, dapat diketahui bahwa penelitian tentang mikrokontroller, sensor infrared, keypad sudah banyak di bahas. Dalam beberapa sumber literature reviewtersebut informasi yang di berikan masih terbatas. Sedangkan saat ini kemajuanteknologi sudah sudah berkembang dengan pesat. Sehingga pengontrolan dapat di lakukan dengan menggabungkan cara kerja dari dua media yang berbeda yaitu keypad dan sensor infrared dalam satu alat yang dimana di gunakan sebagai media untukpengontrolan alat tersebut. Untuk itu dibuatlah penelitian yang berjudul “Akses Kontrol Kendaraan Bermotor Roda Empat Menggunakan Password dan Sensor Infrared Berbasis Mikrokontroller ATmega328”.
BAB III
PERANCANGAN DAN PEMBAHASAN
Konsep Perancangan Dan Pembahasan
Pada perancangandi sini yang dimaksudkan meliputi perancangan perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras yang akandigunakan meliputi motor servo, sensor infrared, keypad membrane4x3, motor DC, lampu led, arsitektur mikrokontroller ATmega328, serta rangkaian sistem akses kontrolkendaraan bermotor roda empat menggunakan passworddan sensor infrared berbasis mikrokontroller ATmega328 dan mekaniknya. Perancangan perangkat kerasnyamenggunakan Arduino Uno sebagai media untuk menanamkan program ke dalammikrokontroller dan perancangan perangkat lunak dilakukan dengan menggunakanprogram Arduino 1.0.
Secaraumum pada perancangan alat iniadalah seperti yang di tunjukkan pada diagram Blok padagambar 3.1. Alat yang dirancang akan membentuk suatu sistem “Akses Kontrol Kendaraan Bermotor Roda EmpatMenggunakan Password dan Sensor Infrared Berbasis Mikrokontroller ATmega328”.
Perancangan sistem secara keseluruhan memerlukan beberapa alat dan bahan yang digunakan dengan deskripsi alat danbahan sebagai berikut:
Alat yang digunakan meliputi
1. Personal Computer (PC).
2. Solder timah.
3. Solder karet.
4. Software Arduino 1.0.
5. Arduino Uno sebagai bootloader untuk upload program.
Sedangkan bahan-bahan yang digunakan
1. Mikrokontroller ATmega328
2. Sensor infrared.
3. Keypad membrane 4x3.
4. Motor servo standar.
5. Motor Direct Current.
6. IC regulator (LM7805, LM7806)
7. Kapasitor Elco 2200 microFarad/35volt, 100 microFarad/16volt
8. Kapasitor keramik 22 pf.
9. Resistor 10 kohm, 330 ohm.
10. Lampu led merah, led hijau, led biru.
11. Heatshink (alumunium pendingin).
12. Jack baterai.
13. Switch On/Off.
14. Timah solder.
15. Kabel konektor.
16. Pin header.
17. Kristal 16 MHz.
18. Socket 28 kaki.
19. Tombol reset.
20. Printed circuit board.
Perancangan Perangkat Keras (Hardware)
Agar mempermudah penulis dalam menjelaskan perancangan perangkat keras, maka di gambarkan alur dan cara kerja perangkat keras pada rangkaian diagram blok pada gambar 3.1 bawah ini:

Gambar 3.1. Diagram blok rangkaian
Pada gambar 3.1 merupakan alur dari diagram blok, yang dimana terdapatkonfigurasi seluruh rangkaian yang digunakan. Prinsip dari kerja sistem yang dirancang adalah sensor infrared dan keypad menjadi media untuk memberikan inputan pada mikrokontroller, ketikamikrokontroller menerima inputan darisensor infrared maka inputan tersebut akan menjadi perintahuntuk motor servo agar berputar kearah kiri sebesar 30 derajat. Dan ketikamikrokontroller menerima inputan daritombol keypad yang berupa angka-angka,maka inputan tersebut akan menjadiperintah baik itu untuk motor servo maupun motor DC, tergantung tombol manayang di tekan pada keypad
Rangkaian Sistem Minimum ATmega328
Agar mikrokontroller ATmega328 dapat digunakan sebagai sistem kontrol perlu dibuat sistem minimumnya. Gambar 3.2 adalah gambar sistem minimum dari mikrokontroller ATmega328.

Gambar 3.2. Rangkaian sistem minimum mikrokontroller ATmega328
Rangkaian sistemminimum ATmega328 pada gambar 3.2 sudah dapat bekerja secara baik dengan memberikan tegangan sebesar 12 volt lalu tegangan tersebut di turunkan lagi menjadi 5 volt dengan menggunakan IC regulator LM7805.
Rangkaian Power Supply
Agar alat yang dibuat dapat bekerja sesuai dengan fungsinya, maka diperlukan sumber tegangan listrik sebagai catu daya. Rangkaian catu daya yang digunakan mendapatkan sumber tegangan dari adaptors switching dengan output 12 volt. Tegangan tersebut kemudian diturunkan menjadi 6volt dan 5 volt tegangan DC, melalui IC regulator LM7806 dan LM7805.Arus yang masuk dari adaptor switching akan melalui kapasitor yang bertujuan untuk mengurangi noise pada tegangan DC.
Setelah itu keluaran dari kapasitor tersebut masuk ke IC regulator yang fungsinya adalahuntuk menstabilkan tegangan. IC regulator ini terdiri dari dua buah IC, yaitu LM7806 yang menghasilkan tegangan +6 volt, dan LM7805 yang menghasilkan tegangan +5 volt. Keluaran dari IC regulator ini kemudian akan masuk kembali ke kapasitor agar tegangan DC yang dikeluarkan dapat lebih halus lagi (smooth).

Gambar 3.3. Rangkaian catu daya
Pada rangkaian catu daya ini menggunakan empat buah sumber catu daya, yang akan digunakan terpisah untuk memberikan tegangankerja pada masing-masing rangkaian. Rangkaian yang menggunakan tegangan sebesar +5 Volt DC adalah rangkaian kontrol L293, rangkaian motor DC, rangkaian sensor infrared dan rangkaian sistem mikrokontroller, sedangkan untuk menggerakan motor servo digunakan tegangan +6 volt DC.
Rangkaian Keypad Membrane 4x3
Keypad merupakan salah satu peripheral yang sangat penting dalam sistem komputer. Berbagai macam keypad bisa kita jumpai, misalnya untuk aplikasi sederhana dapat digunakan keypad 4x3 yang pada dasarnya merupakan konfigurasi saklar/tombolyang disusun berdasarkan baris dan kolom (4 baris dan 3 kolom).
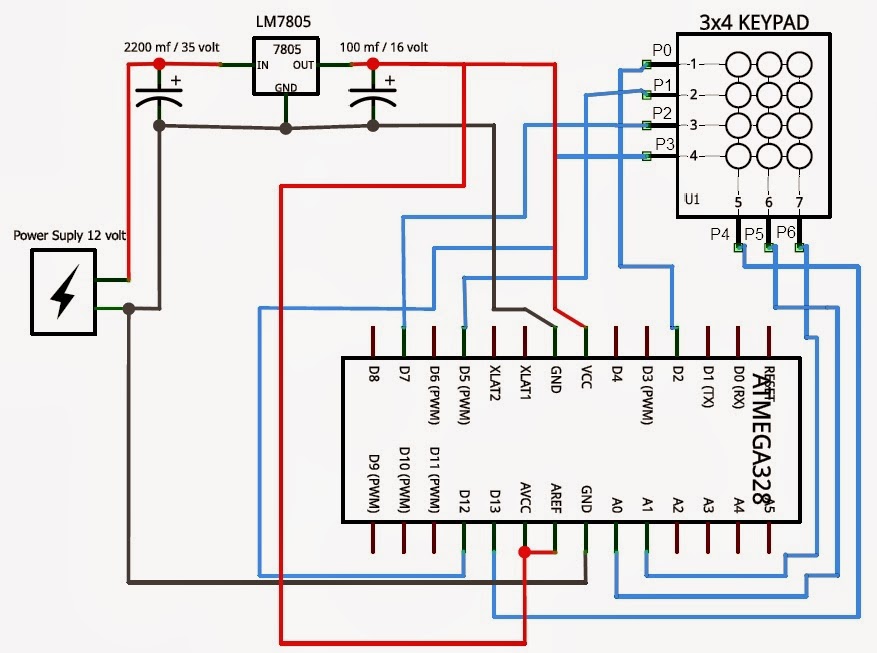
Gambar 3.4. Rangkaian keypad membrane 4x3
Dalam susunan keypadpada rangkaian gambar 3.4 diatas terdapat empat buah baris (P0, P1, P2, dan P3)dan tiga buah kolom (P4, P5, dan P6). Untuk mendeteksi penekanan tombol yangterdapat pada keypad 4x3 tersebut, maka maka harus dilakukan penyapuan (scanning). Langkah-langkah scanning dijelaskansebagai berikut:
Jika P0, P1, P2 dan P3 berlogika ”0” berarti tombol 1, 4, 7, dan * tertekan, dan jika P0, P1, P2, dan P3 berlogika ”1” berarti tidak ada tombol yang tertekan, untukmelakukan proses scanning terhadap tombol-tombol keypad yang lain baik itu dilakukan pada kolom 1, 2,dan 3 semuanya sama.
Rangkaian lampu led
Pada rangkaian di bawah ini menunjukan tiga buahlampu led dengan masing-masingberfungsi sebagai indikator sebuah inputandari keypad ataupun dari sensor infrared,cara kerjanya pada saat menekan angka 1 pada keypad data tersebut akan dikirim ke mikrokontroller dan akanmemberikan inputan ke lampu indikatorkiri pada kondisi HIGH (“1”). artinyalampu indikator untuk belok kiri pada pinA5 akan menyala selama 5 detik. Ketika menekan angka 3 pada keypad akan memberikan inputan ke lampu indikator kanan padakondisi HIGH (“1”). artinya lampuindikator untuk belok kanan pada pin A4 akan menyala selama 5 detik. ketikamenekan angka 2 pada keypad akan memberikan inputanke lampu indikator maju pada kondisi HIGH(“1”). Artinya lampu indikator maju pada pin A3 akan menyala terus karena tidakdiberi delay.

Gambar 3.5. Rangkaian lampu led
Rangkaian motor servo
Motor servo adalahsebuah motor dengan sistem umpan balik tertutup di mana posisi dari motor akandiinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.Motor ini terdiri dari sebuah motor DC,serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukanbatas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diaturberdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motorberikut gambar konfigurasi kaki pada motor servo.
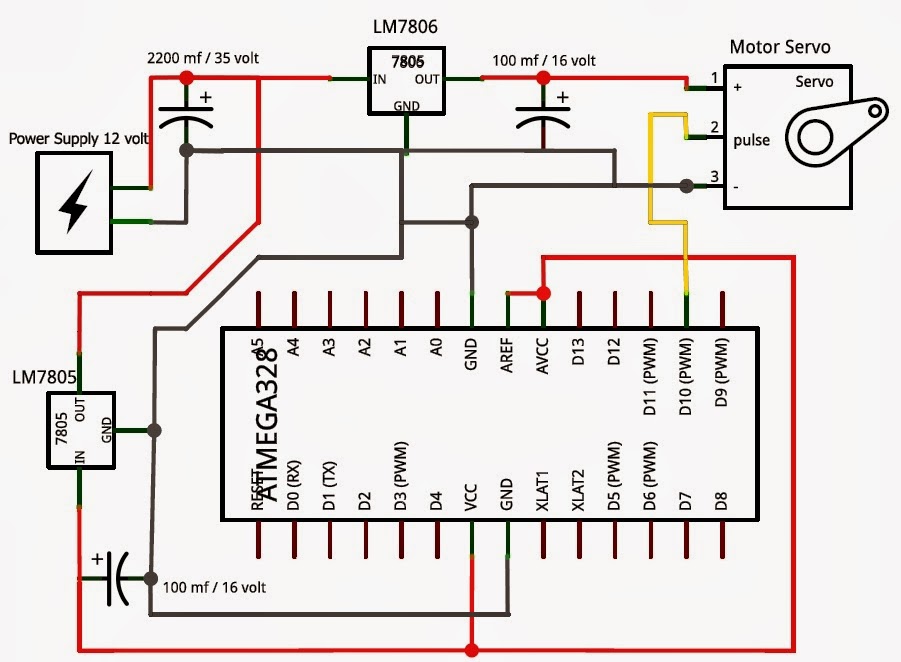
Gambar 3.6. Rangkaian motor servo
Pada rangkaian gambar 3.6 di atas konfigurasi untuk kaki motor servo dengan mikrokontroller ATmega328 beradapada pin digital 10, pada arsitektur mikrokontroller ATmega328 motor servo hanya bekerja pada Pin digital 3, 5, 6, 9, 10, 11 yang memiliki fungsi PulseWidth Modulation (PWM) yaitu merupakan sebuah pendekatan untuk mengendalikan putaran dan kecepatan motor arus searah. Tenaga yang disuplai ke motor dalam bentuk sinyal gelombang kotak dari magnet konstan dengan merubah lebar pulsa atau duty cycle. Duty cycle adalah perbandingan antara lamanya waktu on terhadap waktu off dalam suatu periode waktu.
Cara kerja dari rangkaian pada gambar 3.6 adalah motor servo bekerja ketika mikrokontroller mendapat inputan dari sensor infrared dan keypad yang akan memberikan logika HIGH (“1”) dan logika LOW (“0”) ketika mikrokontroller tidak ada inputan, ketika motor servo mendapat inputan dari sensor motor servo akan berputar berlawanan dengan jarum jam sebesar 30 derajat selama 5 detik. Dan ketika tombol 1, 4, 7 pada keypad kita tekan, maka mikrokontroller akan mendapat inputan dan akan memberikan sinyal aktif pada motor servo sehingga akan berputar berlawanan arah jarum jam masing – masing selama 5 detik, tombol 1 untuk sudut 15 derajat, tombol 4 untuk sudut 30 derajat, tombol 7 untuk sudut 45 derajat.
Rangkaian sensor infrared
Rangkaian switch sensor infrared atau adjustableinfrared sensor digunakan sebagai sensor pendeteksi objek yang akan bekerjasecara otomatis. Ketika sensor terhalang suatu benda maka sensor akan membaca bendatersebut sebagai inputan dan merubahkondisi menjadi kondisi HIGH (“1”) yang kemudian diterima oleh sistemmikrokontroller yang akan memberikankondisi HIGH “1” pada motor servo. Ketika motor servo menerimainputan dari sistem mikrokontrollermaka motor servo akan berputar ke arahkiri sebesar 30 derajat dalam waktu lima detik, hubungan sensor infrared denganmikrokontroller ATmega328 dapat dilihat seperti pada gambar berikut:

Gambar 3.7. Rangkaian sensor infrared
Rangkaian motor DC
Agar motor DC dapat dikontrol dua arah diperlukan driver motor yaitu IC l293. Pada IC l293 terdapat 16 pin yaitu dua pin enable berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC, empat pin input adalah pin input sinyalkendali motor DC, empat pin output adalah jalur output masing-masing driver yang dihubungkan ke motor DC, dua pinVCC adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol driver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan. dan empat pin ground adalah jalur yang harus dihubungkan ke ground, pin GND ini yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Rangkaian di atas baru akan bekerja ketika mendapat inputan dari keypad, tombol keypad yang digunakan adalahtombol dua untuk mengontrol motor DC dengan arah maju, tombol delapan untuk mengontrol arah motor dc dengan arah mundur, dan tombol lima akan mengontrolmotor DC pada posisi berhenti. Cara kerja rangkaian di atas adalah dengan memberikan tegangan 5 volt sebagai Vcc pada pin 16 dan 5 volt pada pindelapan untuk tegangan motor, maka IC l293 siap digunakan. Jika terdapat tegangan input satu dan input dua maka dengan memberikan logika HIGH pada enable1 maka output 1 dan output 2 akan aktif. Sedangkan enable1 berlogika rendah, meskipun terdapat tegangan pada input 1 dan input 2, output tetap nol (tidak aktif). Hal ini juga berlaku untuk input 3, 4 dan output 3, 4 serta enable 2. Konfigurasi pin IC L293 di atas, rangkaian di atas dapat digunakan untuk mengontrol dua motor DC sekaligus, dan juga dapa mengontrol motor DC secara kontinu dan dengan teknik PWM (Pulse-Width Modulation).
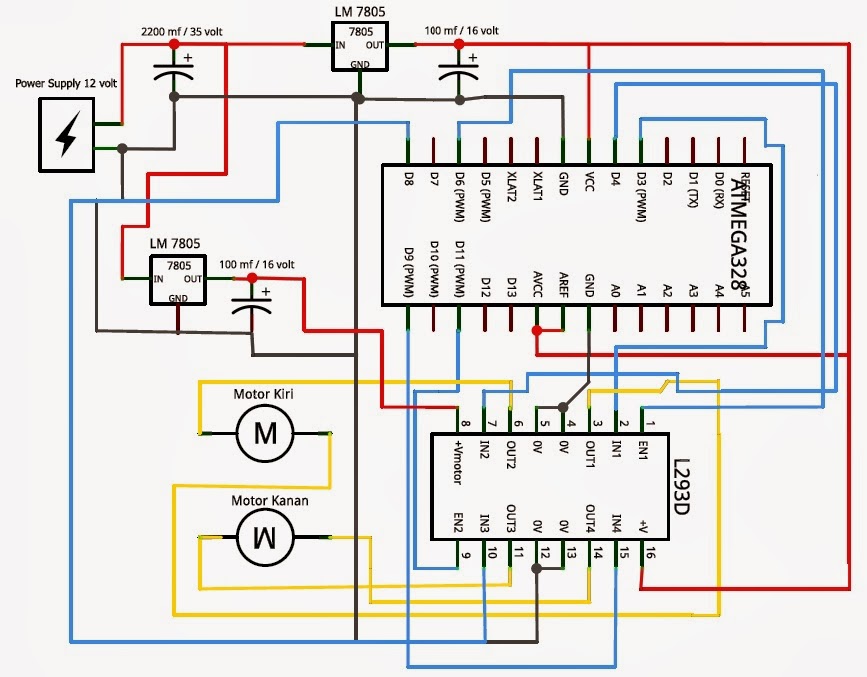
Gambar 3.8.Rangkain driver motor L293
Rangkaian sistem keseluruhan
Setelah melakukan perancangan perangkat keras dari seluruh komponen dan bahan yang digunakan, maka rangkaian sistem keseluruhan akan terlihat seperti gambar 3.9 sebagai berikut:

Gambar 3.9. Skema rangkaian sistem keseluruhan
Keterangan dari jalur-jalur diatas:
a. Jalur merah sebagai arus positif (+).
b. Jalur hitam sebagai arus negatif ( - ).
c. Jalur biru sebagai jalur data.
d. Jalur kuning sebagai jalur PWM untuk motor DC dan motor servo.
e. Jalur hijau sebagai jalur clock (pembangkit frekuensi) untuk kristal.
Konsep Perancangan Perangkat Lunak (Software)
Perancangan perangkat lunak, adalah melakukan penulisan listing program ke dalam suatu Software Arduino 1.0 dengan menggunakan bahasa pemrograman C, dimana perintah-perintah program tersebut akan di eksekusi oleh hardware atau sistem yang di buat.
Penulisan listing program bahasa C
Pada perancangan perangkat lunak akan menggunakan program Arduino 1.0 digunakan untuk menuliskan listing program dan menyimpannya dengan file yang berekstensi .pde, dan bootloader Arduino Uno sebagai media yang digunakan mengupload program ke dalam mikrokontroller, sehingga mikrokontroler dapat bekerja sesuai dengan yang diperintahkan.
Adapun langkah-langkah untuk memulai menjalankan software Arduino 1.0 dapat dilihat seperti pada gambar 3.10. sebagai berikut :

Gambar 3.10. Membuka program Arduino 1.0
Dalam pemrograman mikrokontroller ATmega328 yang akan dibuat, untuk menuliskan listing program dapat dilihat pada gambar 3.11. sebagai berikut:

Gambar 3.11. Tampilan layar program Arduino 1.0
Setelah form utama program Arduino 1.0 ditampilkan, maka langkah selanjutnya adalah mengkonfigurasi pengalamatan port koneksi yang ada pada device manager.

Gambar 3.12. Konfigurasi port melalui device manager
Pada pemrograman mikrokontroller perlu diperhatikan untuk koneksi portnya, karena pada pengalamatan port inilah mikrokontroller dapat berkomunikasi dengan komputermelalui komunikasi serial, pada gambar 3.12. koneksi port diseting pada port 4.

Gambar 3.12. Menentukan koneksi port 4 pada Arduino 1.0
Seting koneksi port pada Arduino 1.0 dilakukan agar pada saat program di upload tidak terjadi error karena kesalahan pada pengalamatan port yang sebelumnya di seting juga melalui device manager.

Gambar 3.14. Menyimpan file program pada Arduino 1.0
Langkah selanjutnya adalah menyimpan listing program yang sudah dibuat dengan nama berekstensi .pde dalam penelitian ini nama file yang akan disimpan dengan nama Project_Final.pde.

Gambar 3.15. Menyimpan program pada Arduino 1.0
Setelah melakukan penyimpanan file program selanjutnya tahap penulisan listing dimulai dari mengimpor librarydan dapat di lihat pada gambar 3.16 sebagai berikut:

Gambar 3.16. Mengimpor library pada header Arduino 1.0
Selanjutnya tahap penulisan program, perlu diketahui pada pemrograman mikrokontroller ATmega328 yang menggunakan bootloader Arduino Uno sebagai media untuk menanamkan program dan Arduino 1.0 sebagai media untuk menuliskan listing program. Serta menambahkan library yang akan digunakan, karena untuk penggunaan motor servo dan keypad dan password, perlu ditambahkan library karena menggunakan fungsi header bahasa c yang terdapat pada Arduino 1.0 itu sendiri.
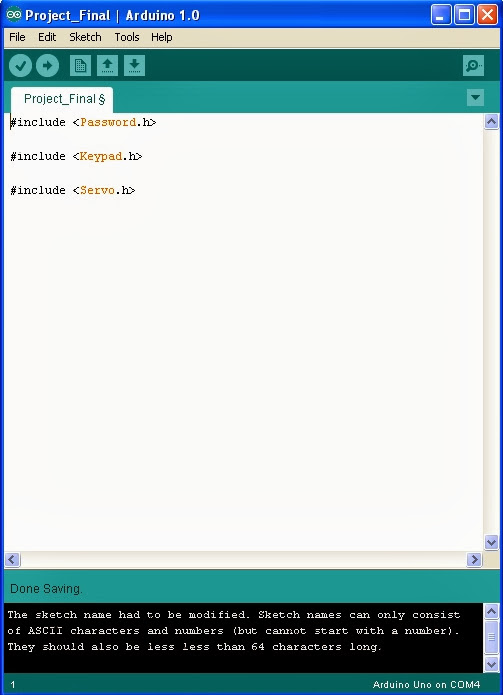
Gambar 3.17. Library-library yang digunakan pada Arduino 1.0
Setelah langkah pada gambar di atas dilakukan, agar sistem dapat bekerja sesuai dengan yang dinginkan, selanjutnya lakukan penulisan listing program secara keseluruhan.

Gambar 3.18. Proses kompilasi listing program
Setelah listing program ditulis semua, langkah selanjutnya proses kompilasi untuk mengecek apakah listing program yang ditulis terjadi kesalahan atau tidak, proses kompilasi dapat dilihat pada gambar 3.18 diatas.

Gambar 3.19. Hasil kompilasi listing program
Pada gambar 3.19. menunjukan hasil dari kompilasi listing program dan hasil dari proses kompilasi tidak terjadi error, artinya proses penulisan listing program sudah benar, hasil dari kompilasi inilah yang nantinya akan ditanamkan ke dalam sistem mikrokontroller ATmega328.
Pengisian program ke dalam IC ATmega328
Mikrokontroller bisabekerja jika di dalamnya sudah dimasukkan listingprogram, program yang akan dimasukan kedalam mikrokontroller ATmega328yaitu program aplikasi yang dibuat dengan aplikasi Arduino 1.0. Untuk melakukanpengisian program menggunakan perangkat keras (Hardware) dan perangkat lunak (Software)dapat dilihat pada gambar 3.20 berikut:

Gambar 3.20. Rangkaianboard Arduino dengan internal clock
Dengan menggunakan arduino sebagai media untuk memasukan program ke dalam mikrokontroller ATmega328, maka program yang ditulis pada Arduino1.0 dapat langsung dimasukan kedalam mikrokontroller ATmega328. Langkah selanjutnya sebelum listing program dimasukan ke dalam mikrokontroller, yang perlu diperhatikan yaitu jenis board yang akan digunakan pada saat memasukan listing program, proses pemilihan board yang digunakan untuk memasukan listing program dapat dilihat pada gambar 3.21. sebagai berikut:
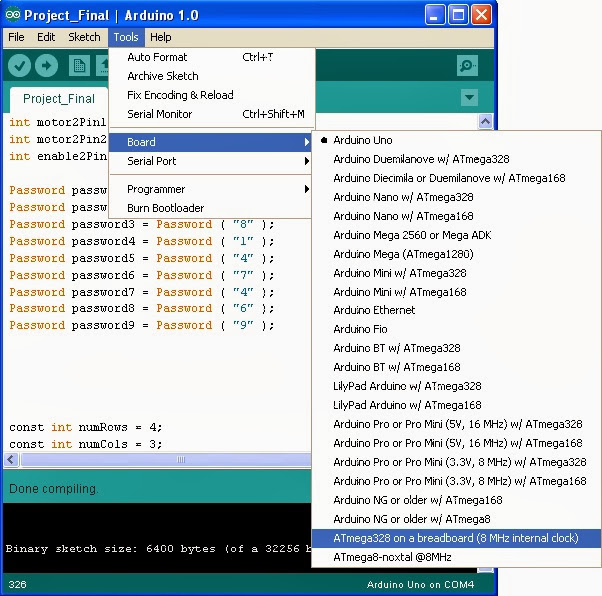
Gambar 3.21. Pemilihan Arduino board
Setelah jenis board sudah dipilih, langkah selanjutnya adalah memasukan program ke dalam mikrokontroller dengan menggunakan internal clock, arti dari internalclock adalah dengan memanfaatkan board Arduino sebagai board untuk berkomunikasi dengan komputer, dan mikrokontroller yang ada pada arduino board tersebut dilepas, agar IC ATmega328 yang akan digunakan dapat terbaca oleh Arduino board.

Gambar 3.22. Mengupload program kedalam mikrokontroller ATmega328
Pada tampilan pemrograman Arduino 1.0 diatas, dilakukan dengan mengklik tombol upload yang ada pada Arduino 1.0, padasaat mengupload listing program secara otomatis akan menampilkan pesan bahwa prosesupload program tidak terjadi error atau sukses. Proses upload listing program yang tidakterjadi error dapat dilihat pada gambar 3.23 sebagai berikut:

Gambar 3.23. Proses upload listing program sukses
Setelah langkah upload listing program selesai, maka sistem mikrokontroller ATmega328 yang berjudul “AKSES KONTROL KENDARAANBERMOTOR RODA EMPAT MENGGUNAKAN PASSWORD DAN SENSOR INFRARED BERBASIS MIKROKONTROLLER ATmega328” sudah siap digunakan.
Diagram alur sistem keseluruhan
Pada pembuatan sebuah sistem kontrol diperlukansebuah gambar yang dapat menjelaskan alur atau langkah-langkah dari cara kerjasebuah sistem yang dibuat, sehingga dapat memberikan penjelasan dalam bentukgambar. Penjelasan yang berupa gambar proses kerja sebuah sistem merupakangambar dari diagram alur sistem yang akan dibuat. Tujuan dari pembuatan diagramalur adalah untuk mempermudah pembaca dan pembuat sistem itu sendiri untukmemahami langkah-langkah serta cara kerja sebuah sistem yang dibuat. Daripenelitian yang dilakukan menghasilkan flowchartsistem sebagai berikut:
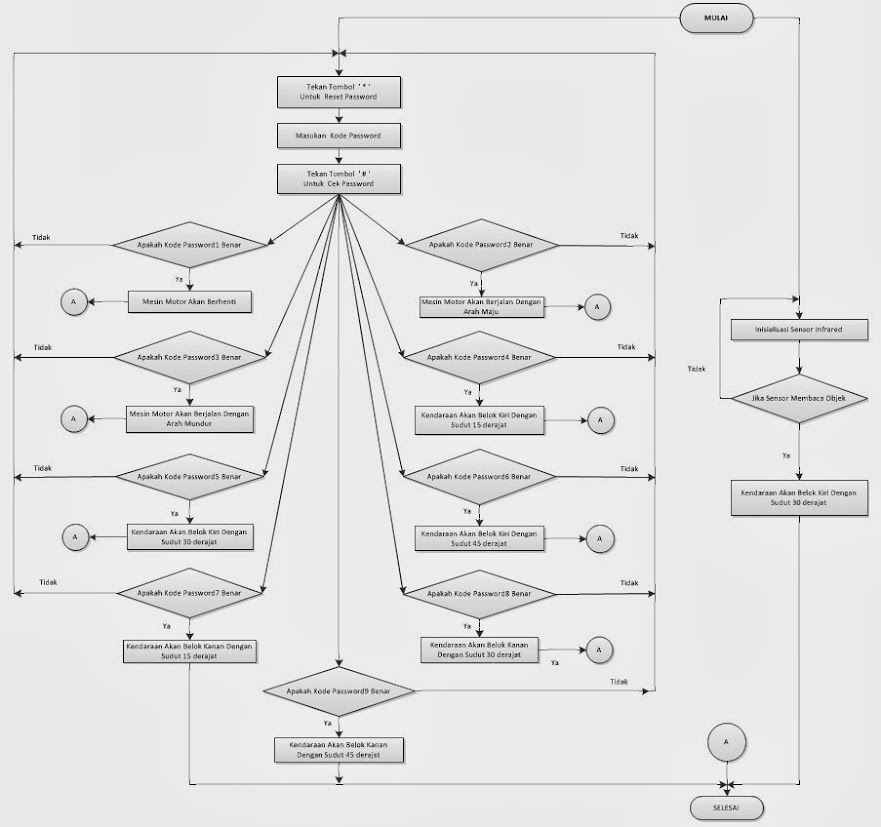
BAB IV
UJI COBA DAN ANALISA
4.1. Uji Coba
Setelah melakukan perancangan dan pemasangan komponen, selanjutnya adalah melakukan serangkaian uji coba pada masing-masing blok rangkaian yang bertujuan untuk mendapatkankesesuaian spesifikasi dan hasil yang diinginkan. Untuk lebih jelas mengenai pembahasan hasil uji coba yang akan dilakukan dan dapat dilihat pada sub bab berikut.
Pengujian rangkaian catu daya
Catu daya sebagai power supplyadalah sebuah piranti elektronikayang berguna sebagai sumber daya untuk piranti lain yang sangat penting. Dalam realisasi perangkat keras yang berupa motorDC, driver L293 motor servo dankeseluruhan rangkaian sistem di sini membutuhkan catu daya. Gambar 4.1 adalahmerupakan gambar rangkaian catu daya yang terhubung dalam suatu rangkaiansistem. Uji coba dilakukan dengan menggunakan lampu led (light-emitting diode), sebagai outputdari tegangan kerja pada sebuah rangkaian catu daya, uji coba rangkaian catudaya dapat di lihat pada gambar 4.1 sebagai berikut:

Gambar 4.1. Pengujian rangkaian catu daya
Dari hasil pengujian pada rangkaian diatas didapatkan hasil yang terukur sebenarnya adalah sebagai berikut :
1. Hasil pengukuran pada IC regulator satu yang merupakan output untuk rangkaianmikrokontroller berupa tegangan DC sebesar +5 volt. Setelah dilakukan pengukuran adalah sebesar 4.72 volt DC.
2. Hasil pengukuran keluaran dari IC regulatordua yaitu merupakan tegangan untuk driver motor IC L293 sebagai Vcc padapin 16 dan tegangan untuk motor DC yang di pasang pada IC L293 di pin 8 sebasar4.72 volt.
3. Hasil pengukuran keluaran dari IC regulatortiga yaitu merupakan tegangan untuk sensor infrared sebesar 4.72 volt.
4. Hasil pengukuran keluaran dari IC regulatorempat yaitu merupakan tegangan input untukmotor servo sebesar 4.88 volt.
Dari hasil pengujian rangkaian catu daya didapatkan hasil yang cukup stabil untuk membuat sistem dapat bekerja seperti yang diharapkan, sehingga pada rangkaian catu daya ini sudah dapat digunakan dengan baik.
Pengujian rangkaian keypad membrane
Keypad digunakan untuk memasukkan angka–angka dan instruksi yang telah ditentukan oleh program yang ada dalam mikrokontroler yang kemudian untuk mendeteksi penekanan tombol yang terdapat pada keypad 4x3 tersebut, maka harus dilakukan penyapuan (scanning). Untuk proses scanning pada keypad menggunakan kolom C0, C1, C2. Pada saat kondisi kolom C0 berada diset pada kondisi HIGH, kemudian baca kondisi kolom C0.
Jika ROW0 menjadi = 0 berarti tombol 1 tertekan
Jika ROW2 menjadi = 0 berarti tombol 7 tertekan
Jika ROW3 menjadi = 0 berarti tombol * tertekan
Jika ROW0 = ROW1 = ROW2 = ROW3
tetap = 1 berarti tidak ada tombol yang tertekan.
Dari proses kerja keypad dapat diambil kesimpulan untuk melakukan uji coba dengan mengontrol sebuah lampu led, uji coba dilakukan dapat dilihat pada gambar 4.2 sebagai berikut:

Gambar 4.2. Pengujian rangkaian keypad 4x3
Prinsip kerja dari rangkaian ini adalah ketika menekan tombol bintang ” * ” pada keypad lampu led akan menyala, dan menekan tombol pagar ” # ” pada keypad lampu led akan mati.
Setelah melihat hasil yang didapatkan dalam pengujian tersebut, maka dapat diambil kesimpulan bahwa rangkaian keypad bekerja sesuai dengan yang diinginkan.
Adapun listing Program yang digunakan dalam uji coba dari rangkaian di atas adalah sebagai berikut:
- include <Keypad.h>
char keys[rows][cols] = {
{'1','2','3'},
{'4','5','6'},
{'7','8','9'},
{'#','0','*'}
};
byte rowPins[] = { 0, 1, 2, 3 };
byte colPins[] = { 6, 5, 4 };
Keypad keypad = Keypad(rowPins, colPins, sizeOf(rowPins) , sizeOf(colPins));
#define ledPin 13
void setup() {
digitalWrite(ledPin, HIGH);
Serial.begin(9600);
keypad.addEventListener(keypadEvent);
}
void loop() {
keypad.getKey();
}
void keypadEvent(KeypadEvent eKey)
{
switch (eKey) {
case '*':
digitalWrite(ledPin, HIGH);
break;
case '#':
digitalWrite(ledPin, LOW);
break;
case KEY_RELEASED:
Serial.println("Key Released");
break;
default:
if (eKey != NO_KEY)(Serial.println(eKey);
}}}
Pengujian rangkaian pengendali motor DC
Rangkaian pengendali motor DC digunakan untuk mengendalikan motor DC untuk melakukan perputaran ke arah kanan dan kiri, dalam hal ini untuk melakukan proses menjalankan roda kendaraan bermotor roda empat.
Pengujian yang akan dilakukan pada rangkaian pengendali motor DC menggunakan IC L293, hanya untuk mengetahui dan memastikan bahwa arah putaran dan besar tegangan yang digunakan sesuai dengan kebutuhan sistem tersebut. Langkah pertama yang dilakukan adalah memberikan tegangan pada rangkaian L293 untuk menentukan tegangan yang sesuai dengan tenaga ( torsi ) yang dihasilkan dan tidak terlalu cepat perputarannya untuk motor DC. Berikut adalah merupakan hasil pengujian perbandingan antara tegangan dengan torsi yang dihasilkan.
1. Motor DC diberikan tegangan sebesar 12 volt, torsi yang dihasilkan terlalu cepat, sehingga IC regulator akan cepat panas.
2. Motor DC diberikan tegangan sebesar 9 volt, torsi yang dihasilkan dapat menggerakkan pintu , tetapi kecepatan roda kendaran bermotor roda empat masih terlalu tinggi.
3. Motor DC diberikan tegangan sebesar 5 volt, torsi yang dihasilkan mampu menggerakkan roda kendaraan bermotor roda empat pada kecepatannya yang diinginkan.

Setelah melakukan beberapa tahapan pengujian pada rangkaian pengendali motor DC, hasil pengujian yang dilakukan sesuai dengan kebutuhan sistem. Sehingga tegangan 5 volt yang digunakan sudah cukup untuk mengendalikan motor DC tersebut.
Pengujian rangkaian mikrokontroller dan motor servo
Pengujian motor servo menggunakan rangkaianmikrokontroler dilakukan dengan dihubungkan langsung dengan pin data pada motor servo, kemudian untuk tegangan kerja motor servomembutuhkan power sebesar 5 volt DC agar motor servo dapat berputar sesuai yang di inginkan. Dan untuk melakukan pengujian terhadap motor servo diperlukan listing program untuk mengontrol arah putaran motor servo, uji coba selanjutnya akan menggerakan motor servo dengan arah putaran jarum jam sebesar 180 derajat, dan akan kembali pada posisi awal yaitu 0 derajat ketika arah putaran sudah mencapai 180 derajat, proses ini secara terus menerus sampai power supply di matikan.
Uji coba motor servo menggunakan listing program sederhana dan dapat dilihat pada gambar 4.4 sebagai berikut:
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(9);
}
void loop(){
for( pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for( pos = 180; pos >= 1; pos -= 1)
{
myservo.write(pos);
delay(15);
}
}
Setelah melakukan proses memasukan listing program kedalam mikrokontroller, uji coba motor servo akan terlihat seperti pada gambar berikut:

Gambar 4.3. Pengujian rangkaian motor servo
Pengujian rangkaian mikrokontroller dan sensor infrared
Sensor infrared merupakan salah satu saklar yang terdapat seperangkat alat pemancar dan alat penerima yang dapat mengubah energi cahaya menjadi sinyal listrik. Sensor infrared mengeluarkan respon sesaat ada objek yang menghalangi jarak pancar dari sensor infrared tersebut, dan sinyal aktif yang diterima oleh mikrokontroller ATmega328 dari sensor infrared tersebut, kemudian akan diproses dan mikrokontroller ATmega328 akan mengirimkan sinyal aktif kepada motor servo, sehingga motor servo akan berlogika HIGH yang artinya motor servo akan berputar 30 derajat ke arah berlawan dengan jarum jam. Dan ketika sensor infrared tidak mendeksi objek, maka motor servo akan berada pada posisi diam. Adapun listing program yang digunakan sebagai berikut :
- include <Servo.h>
int sensorInfrared = A2;
int val1;
Servo servo;
int pos = 90;
int pos2 = 60;
void setup() {
Serial.begin(9600);
servo.attach(10);
servo.write(pos);
}
void loop() {
val1 = digitalRead(sensorInfrared);
if (val1 == LOW) {
servo.write(pos2);
}
else
{
if (val1 == HIGH) {
servo.write(pos);
}}}
Analisa listing program pada alat akses kontrol kendaraan bermotor
Proses analisa dilakukan untuk mendapatkan kesesuaian antara perangkat keras (hardware) yang sudah di uji coba dengan perangkat lunak (software) yang berupa listing program yang telah di masukan ke dalam sistem mikrokontroller.
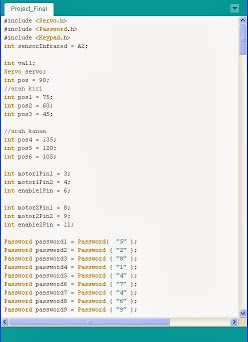



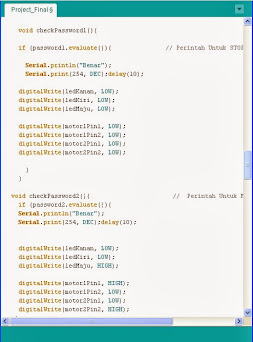
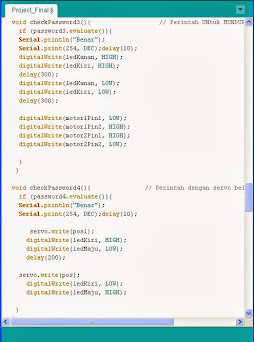



Gambar 4.4. Listing program keseluruhan
Setelah melakukan penulisan listing program pada Arduino 1.0 dilakukan maka dapat dijelaskan seperti berikut:
penulisan listing program harus diawali dengan kode:
#include <Servo.h>
#include <Password.h>
#include <Keypad.h>
Kode di atas merupakan fungsi libraries yang ada pada software Arduino 1.0, yang didalamnya terdapat fungsi-fungsi yang untuk digunakan pada motor servo, keypad, dan password.
Sedangkan motor DC tidak dikontrol langsung menggunakan mikrokontroller, kerena motor DC hanya berputar searah dengan jarum jam, maka dari itu dengan memanfaatkan driver motor L293 untuk mengontrol motor DC, maka motor DC dapat dikontrol dua arah yakni searah dengan jarum jam dan sebaliknya bisa di kontrol dengan arah berlawanan jarum jam. Adapun listing program yang digunakan sebagai berikut:
int motor1Pin1 = 3;
int motor1Pin2 = 4;
int enable1Pin = 6;
int motor2Pin1 = 8;
int motor2Pin2 = 9;
int enable2Pin = 11;
Sedangkan untuk mendefinisikasikan password yang akan di gunakan untuk mengontrol kendaraan bermotor roda empat menggunakan kode :
Password password1 = Password( "5" );
Password password2 = Password ( "2" );
Password password3 = Password ( "8" );
Password password4 = Password ( "1" );
Password password5 = Password ( "4" );
Password password6 = Password ( "7" );
Password password7 = Password ( "3" );
Password password8 = Password ( "6" );
Password password9 = Password ( "9" );
Selanjutnya pada bagian ini akan menjelaskan bagian-bagian program yang di deklarasikan untuk motor servo, listing program dapat dilihat seperti berikut:
int val1;
Servo servo;
int pos = 90;
//arah kiri
int pos1 = 75;
int pos2 = 60;
int pos3 = 45;
//arah kanan
int pos4 = 135;
int pos5 = 120;
int pos6 = 105;
pada listing program bagian diatas merupakan sudut-sudut yang di seting untuk motor servo ketika menerima inputan baik itu berupa inputan dari keypad maupun dari sensor infrared.
Dan untuk mendeklarasikan sensor infrared agar dapat di kenal oleh mikrokontroller, listing program dapat di deklarasikan seperti kode berikut:
int sensorInfrared = A2;
int val1;
Perintah di atas di deklarasikan pada awal penulisan program, sehingga sensor yang dideklarasikan dapat di kenal oleh mikrokontroller.
4.2.1. Penjelasan struktur listing program
Setiap program yang menggunakan bootloader Arduino biasa disebut sketch mempunyai dua buah fungsi yang harus ada yaitu:
1.Void setup() { }
yaitu semua kode didalam kurung kurawal akan dijalankan hanya satu kali ketika program dijalankan untuk pertama kalinya.
2.void loop( ) { }
yaitu fungsi ini akan dijalankan setelah fungsi setup (void setup () { }) selesai. Setelah dijalankan satu kali fungsi ini akan dijalankan lagi, dan lagi secara terus menerus sampai catu daya (power) dilepaskan. Berikut ini adalah elemen bahasa C yang dibutuhkan dalam format penulisan.
1.pinMode
digunakan dalam void setup() untuk mengkonfigurasi pin apakah sebagai input atau output. Untuk output digital pin secara default di konfigurasi sebagai input sehingga untuk merubahnya harus menggunakan operator pinMode (pin, mode) dan digunakan untuk menetapkan mode dari suatu pin, pin adalah nomor pin yang akan digunakan dari 0-19 (pin analog 0-5 adalah 14-19). Mode yang bisa digunakan adalah INPUT atau OUTPUT.
2.digitalWrite
digunakan untuk mengset pin digital. Ketika sebuah pin ditetapkan sebagai output, pin tersebut dapat dijadikan HIGH (ditarik menjadi 5 volts) atau LOW (diturunkan menjadi ground).
Uji coba alat akses kontrol kendaraan bermotor
Setelah melakukan analisa pada listing program yang di masukan kedalam mikrokontroller, selanjutnya di lakukan uji coba terhadap alat.
Uji coba dengan memberikan inputan pada sensor infrared
Uji coba pertama dilakukan dengan memberikan inputan terhadap sensor infrared yang berupa pembacaan objek oleh sensor infrared, sebelum sensor infrared mendeteksi adanya objek yang mengenainya maka sensor infrared dalam kondisi LOW, dan ketika objek mengenai sensor infrared dan melakukan pembacaan terhadap objek tersebut maka kondisi sensor infrared akan menjadi kondisi HIGH yang artinya sensor akan aktif, sehingga motor servo akan berputar kearah kirisebesar 30 derajat dan lampu indikator yang menyala pada gambar 4.6 menandakanbahwa kendaraan tersebut akan belok kiri dengan sudut 30 derajat.
{val1 = digitalRead(sensorInfrared);
if (val1 == LOW){
servo.write(pos2);
digitalWrite(ledKiri, HIGH);
delay(200);
servo.write(pos);
digitalWrite(ledKiri, LOW);

Gambar 4.5. Uji coba alat dengan memberikan input pada sensor infrared
Uji coba dengan menekan tombol 5 pada keypad
Pada uji coba di sini dilakukan dengan menekan tombol 5 pada keypad yang berfungsi untuk memberikan tegangan rendah pada driver motor L293 di pin enable1 dan pin enable2 sehingga motor DC tidak akan bekerja walaupun terdapat tegangan pada input 1 dan input 2. Lampu indikator yang menyala pada gambar 4.7 menandakan bahwa ada tombol 5 di tekan. Listing program yang digunakan dapat dapat dilihat seperti berikut.
digitalWrite(ledKiri, LOW);
void checkPassword1(){
digitalWrite(ledKiri, LOW);
if (password1.evaluate()){
Serial.println("Benar");
Serial.print(254, DEC);delay(10);digitalWrite(ledKanan, LOW);
digitalWrite(ledKiri, LOW);digitalWrite(ledMaju, LOW);
digitalWrite(motor1Pin1, LOW); digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW); digitalWrite(motor2Pin2, LOW);

Gambar 4.6. Uji coba alat dengan menekan tombol 5 pada keypad
Uji coba dengan menekan tombol 2 pada keypad
Pada uji coba di sini dilakukan dengan menekan tombol 2 pada keypad yang berfungsi untuk memberikan tegangan HIGH pada driver motor L293 di pin motor1Pin1 dan pin motor2Pin2 maka semua output pada driver motor L293 akan aktif sehingga motor DC akan bekerja dan akan berputar searah jarum jam. Lampu indikator yang menyala pada gambar 4.8 menandakan bahwa tombol 2 di tekan yang artinyakendaraan akan berjalan dengan arah maju. listing program yang digunakan dapat dapat dilihat seperti berikut.
void checkPassword2(){
if (password2.evaluate()){
Serial.println("Benar");
Serial.print(254, DEC);delay(10);
digitalWrite(ledKanan, LOW);
digitalWrite(ledKiri, LOW);
digitalWrite(ledMaju, HIGH);
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}}

Gambar 4.7. Uji coba alat dengan menekan tombol 2 pada keypad
Uji coba dengan menekan tombol 8 pada keypad
Pada uji coba di sini dilakukan dengan menekan tombol 8 pada keypad yang berfungsi untuk memberikan tegangan HIGH pada driver motor L293 di pin motor1Pin2 dan pin motor2Pin1 maka semua output pada driver motor L293 akan aktif sehingga motor DC akan bekerja dan akan berputar berlawanan dengan arah jarum jam. Lampu indikator yang menyala pada gambar 4.9 menandakan bahwa tombol 8 di tekan yang artinya kendaraan tersebut akan berjalan dengan arah mundur. listing program yang digunakan dapat dapat dilihat seperti berikut.
void checkPassword3(){
if (password3.evaluate()){
Serial.println("Benar");
Serial.print(254, DEC);delay(10);
digitalWrite(ledKanan, HIGH);
digitalWrite(ledKiri, HIGH);
delay(300);
digitalWrite(ledKanan, LOW);
digitalWrite(ledKiri, LOW);
delay(300);
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
}}

Gambar 4.8. Uji coba alat dengan menekan tombol 8 pada keypad
Uji coba dengan menekan tombol 1, 4, 7 pada keypad
Pada uji coba di sini dilakukan dengan menekan tombol 1, 4, 7 pada keypad yang berfungsi untuk mengerakan motor servo dengan arah kiri, ketika tombol 1, 4, 7 di tekan kendaraan tersebut akan belok ke kiri dengan sudut yang sudah di tentukan. Lampu indikator yang menyala pada gambar 4.10 menandakan tombol 1, 4, 7 di tekan yang artinya kendaraan tersebut akan belok kiri sesuai dengan tombol yang di tekan, ketika tombol 1 ditekan kendaraan akan belok kiri dengan sudut 15 derajat, tombol 4 pada sudut 30 derajat dan tombol 7 pada sudut 45 derajat. listing program yang digunakan dapat dapat dilihat seperti berikut.
void checkPassword4(){
if (password4.evaluate()){
Serial.println("Benar");
Serial.print(254, DEC);delay(10);
servo.write(pos1);
digitalWrite(ledKiri, HIGH);
digitalWrite(ledMaju, LOW);
delay(200);
servo.write(pos);
digitalWrite(ledKiri, LOW);
digitalWrite(ledMaju, HIGH);
}}

Gambar 4.9. Uji coba alat dengan menekan tombol 1, 4, 7 pada keypad
Uji coba dengan menekan tombol 3, 6, 9 pada keypad
Pada uji coba di sini dilakukan dengan menekan tombol 3, 6, 9 pada keypad yang berfungsi untuk mengerakan motor servo dengan arah kanan, ketika tombol 3, 6, 9 di tekan kendaraan tersebut akan belok ke kanan dengan sudut yang sudah di tentukan. Lampu indikator yang menyala pada gambar 4.11 menandakan tombol 3, 6, 9 di tekan yang artinya kendaraan tersebut akan belok kanan sesuai dengan tombol yang di tekan, ketika tombol 3 ditekan kendaraan akan belok kanan dengan sudut 15 derajat, tombol 6 pada sudut 30 derajat dan tombol 9 pada sudut 45 derajat. listing program yang digunakan dapat dapat dilihat seperti berikut.
void checkPassword7(){
if (password7.evaluate()){
Serial.println("Benar");
Serial.print(254, DEC);delay(10);
servo.write(pos6);
digitalWrite(ledKanan, HIGH);
digitalWrite(ledMaju, LOW);
delay(200);
servo.write(pos);
digitalWrite(ledKanan, LOW);
digitalWrite(ledMaju, HIGH);
}
}

Gambar 4.10. Uji coba dengan menekan tombol 3, 6, 9 pada keypad
BAB V
PENUTUP
Kesimpulan
1. Dengan menggunakan metode password akses dan sensor infrared yang diproses olehmikrokontroller dapat menggerakan mesin motor, dan membelokan kendaraan sesuai dengan perintah yang di inginkan.
2. Dengan memanfaatkan kode password dan sensor infrared tidak hanya dapat mengontrol sistem kendali kendaraan bermotor roda empat saja melainkan bisa di manfaatkan sebagai sistem keamanan juga karena tidak sembarang orang dapat mengetahui password yang digunakan untuk mengontrol kendaraan bermotor roda empat tersebut.
3. Dengan memanfaatkan teknologi mikrokontroller sebagai media untuk menanamkan program dan keypad 4x3 alat input, berbagi jenis password pun dapat dibuat sesuai dengan tombol yang ada pada keypad tersebut.
4. Penggunaan sistem ini dapat membantu pengendara dalam mengendarai kendaraan bermotor roda empat, karena sistem ini dipasang sensor infrared untuk dapat di fungsikan sebagai pendeteksi objek, sehingga kendaraan bermotor roda empat dapat menghindar ketika ada objek atau kendaraan lain yang ada di depannya.
Saran
1. Sebagai negara berkembang, sistem ini sangat dibutuhkan untuk meningkatkan perkembangan teknologi pada industri kendaraan bermotor roda empat.
2.Sistem ini tidak hanya dapat digunakan pada kendaraan bermotor roda empat saja, melainkandapat digunakan juga sebagai media akses mesin industri maupun sistem keamanan yang lainnya.
3.Bagi peneliti selanjutnya, sistem ini dapat dikembang untuk sistem autopilot, hanya tinggal penambahan beberapa sensor infrared lagi, agar sistem tersebut dapat dikontrol secara otomatis tampa campur tangan manusia.
DAFTAR PUSTAKA
- ↑ 1,0 1,1 Saefullah, Sumardi Sadi, Yugo Bayana. 2009. “Smart Wheeled Robotic (SWR) Yang Mampu Menghindari Rintangan Secara Otomatis”. CCIT, Vol.2 No.3 – Mei 2009
- ↑ http://avrprogrammers.com/devices/ATmega/atmega328.
- ↑ 3,0 3,1 http://elektronika-dasar.web.id/komponen/driver-motor-dc-l293d
- ↑ http://elektronika-dasar.web.id/artikel-elektronika/matrix-keypad-4x4-untuk-mikrokontroler/
- ↑ http://www.dfrobot.com/wiki/index.php/Adjustable_Infrared_Sensor_Switch_%28SKU:SEN0019%29
- ↑ Arifin dan Ardi Amir. 2009. “Pemodelan Dan Pengendalian Motor Listrik U.S Electric Motors Type Dripproof 1750 Rpm/40 Hp/240 Volt”. UniversitasTadulako. Jurnal JIMT, Vol. 6, No. 1, Mei 2009: 50 – 59
- ↑ http://elektronika-dasar.web.id/teori-elektronika/definisi-kapasitor/
- ↑ http://elektronika-dasar.web.id/rangkaian/oscilator-dengan-kristald
- ↑ http://elektronika-dasar.web.id/komponen/regulator-tegangan-positif-78xx/
- ↑ Syahrul. 2012. “Mikrokontroller AVR ATMEGA8535
- Kartu Bimbingan
- Sertifikat Internasional
- Sertifikat IT
- Sertifikat Prospek
- Sertifikat TOEFL
- Formulir Final Presentasi
- Sertifikat DOM
- Formulir Seminar Proposal
- Lembar Keaslian Skripsi
- Lembar Pengesahan Skripsi
- Lembar Persetujuan Pembimbing
- Formulir Pertemuan Stakeholder
- Formulir Permohonan Pergantian Judul
- Kwitansi Pembayaran
VIDEO ALAT