Backupa2016
PURWARUPA ROBOT PEMOTONG RUMPUT TAMAN
MENGGUNAKAN RASPBERRY Pi PADA
PT. DIAN SURYA GLOBAL

Disusun Oleh :
NIM |
: 1133469843
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI CREATIVE COMMUNICATION AND INNOVATIVE TECHNOLOGY
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2015/2016
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PURWARUPA ROBOT PEMOTONG RUMPUT TAMAN
MENGGUNAKAN RASPBERRY Pi PADA
PT. DIAN SURYA GLOBAL
Disusun Oleh :
NIM |
: 1133469843
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
:Sistem Komputer
|
Konsentrasi |
: Creative Communication And Innovative Technology
|
Disahkan Oleh :
Tangerang, ..... 2016
| Ketua |
Kepala Jurusan
| ||||
| STMIK RAHARJA |
Jurusan Sistem Komputer
| ||||
| (Ir. Untung Rahardja, M.T.I) |
|||||
| NIP : 000594 |
NIP : 079010
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PURWARUPA ROBOT PEMOTONG RUMPUT TAMAN
MENGGUNAKAN RASPBERRY Pi PADA
PT. DIAN SURYA GLOBAL
Dibuat Oleh :
Nim |
: 1133469843
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And Innovative Technology
Disetujui Oleh :
Tangerang,.... 2015
| Pembimbing I |
Pembimbing II
| ||
| Moch. Ibnu Safari, M.Kom
| |||
| NID : 10001 |
NID : 14009
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PURWARUPA ROBOT PEMOTONG RUMPUT TAMAN
MENGGUNAKAN RASPBERRY Pi PADA
PT. DIAN SURYA GLOBAL
Dibuat Oleh :
NIM |
: 1133469843
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And Innovative Technology
Tahun Akademik 2015/2016
Disetujui Penguji :
Tangerang, .... 2016
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
PURWARUPA ROBOT PEMOTONG RUMPUT TAMAN
MENGGUNAKAN RASPBERRY Pi PADA
PT. DIAN SURYA GLOBAL
Disusun Oleh :
NIM |
: 1133469843
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Creative Communication And Innovative Technology
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
| Tangerang, .......... 2015 | |
| Luvia Giantika Septiani | |
| NIM.1133469843 |
ABSTRAKSI
Isi abstraksi dengan bahasa indonesis.
Kata Kunci: ........
ABSTRACT
Isi abstract dengan bahasa inggris.
Keywords : ............
Puji syukur alhamdulillah, penulis panjatkan kehadirat Allah SWT yang telah memberikan seribu jalan, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Kuliah Kerja Praktek Penulis dapat berjalan dengan baik dan selesai dengan semestinya.
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, penulis mengambil data berdasarkan hasil observasi, wawancara, survey serta studi pustaka yang mendukung penulisan ini.
Hati kecil ini pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan yang singkat ini, izinkanlah penulis menyampaikan selaksa pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I selaku Ketua STMIK Raharja.
- Bapak Sugeng Santoso, M.Kom, selaku Pembantu Ketua I Bidang Akademik STMIK Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd selaku Kepala Jurusan Sistem Komputer STMIK Perguruan Tinggi Raharja dan juga sebagai Dosen Pembimbing I yang telah berkenan memberikan bimbingan dan pengarahan kepada penulis.
- Bapak Moch. Ibnu Safari, M.Kom selaku Dosen Pembimbing 2, yang telah meluangkan waktunya dan memberikan arahan serta saran-saran kepada penulis sehingga Laporan Skripsi ini bisa penulis selesaikan
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kedua orang tua tercinta, yang telah memberikan dukungan baik moral maupun material.
- Special Thanks to Yosafine Rifki,yang telah memotivasi semangat, niat dan keinginan penulis untuk menyelesaikan pembuatan laporan Skripsi ini.
- Teman-Teman seperjuangan yang telah memberikan saya semangat dalam menyelesaikan Laporan Skripsi ini.
- Serta semua pihak yang tidak dapat penulis sebutkan satu persatu yang telah ikut membantu dalam penyusunan Laporan Skripsi ini.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari sempurna. Oleh karena itu kritik dan saran yang membangun, penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, ..... 2016 | |
| Luvia Giantika Septiani | |
| NIM. 1133469843 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 Teori Umum
- 2.1.1 Konsep Dasar Perancangan Sistem
- 2.1.2 Konsep Dasar Pengontrolan
- 2.1.3 Konsep Dasar Prototipe
- 2.1.4 Internet Of Thing
- 2.1.5 Jamur
- 2.1.6 Budidaya
- 2.1.7 Monitoring
- 2.1.8 Konsep Dasar Flow Chart
- 2.1.9 Konsep Dasar Prototipe
- 2.1.10 Konsep Dasar Data Flow Diagram (DFD)
- 2.1.11 Konsep Dasar Literature Review
- 2.1.12 Konsep Dasar Elisitasi
- 2.2 Teori Khusus
- 2.2.1 Konsep Dasar Robot
- 2.2.2 Konsep Dasar Raspberry Pi
- 2.2.3 Konsep Dasar Sistem Operasi Raspbian
- 2.2.4 Konsep Dasar Linux
- 2.2.5 Konsep dasar Phyton
- 2.2.6 Komponen Dasar Elektronika
- 2.2.7 Konsep Dasar Motor
- 2.2.8 Konsep Dasar Rangka Chasis
- 2.2.9 Konsep Dasar Kamera Webcam
- 2.2.10 Konsep Dasar Power Supply
- 2.2.11 Protokol TCP/IP
- 2.2.12 Internet Protokol
- 2.2.13 Jaringan Komputer Nirkabel (Wireless)
- 2.2.14 Konsep Dasar TP LINK TL-WN722N
- 2.2.15 Konsep Dasar Web Browser
- 2.3 Literature Review
- 2.1 Teori Umum
- 3 BAB III
- 3.1 Tinjauan Organisasi
- 3.2 Tata Laksana Sistem Yang Berjalan
- 3.3 Pembuatan Alat
- 3.4 Permasalahan yang dihadapi dan Alternatif Pemecahan Masalah
- 3.5 User Requirement
- 4 BAB IV
- 5 BAB V
- 6 DAFTAR PUSTAKA
- 7 DAFTAR LAMPIRAN
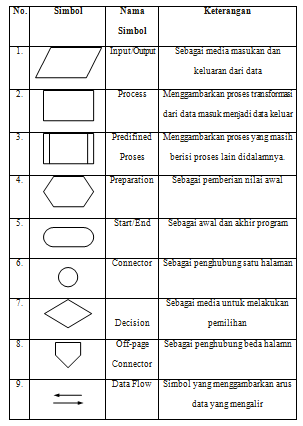
DAFTAR SIMBOL
DAFTAR SIMBOL FLOWCHART (DIAGRAM ALIR)
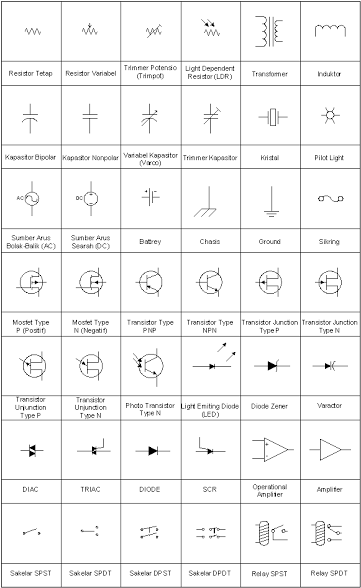
DAFTAR SIMBOL ELEKTRONIKA
DAFTAR TABEL
DAFTAR GAMBAR
BAB I
Latar Belakang
Jamur tiram merupakan salah satu tanaman berprotein tinggi yang hanya dapat hidup di daerah daratan tinggi yang banyak di budidayakan oleh para petani, pada saat in proses pengembabiakan jamur hanya di lakukan di daratan tinggi. Sehingga produksi jamur hanya menghasilkan kurang lebih 50 sampai 100 kg per kumbung tiap harinya. Seiring berkembangnya jaman dan teknologi, maka pada masa kini juga sebagian besar pembudidayaan jamur tiram dilakukan oleh tenaga manusia dengan sistem industri rumahan yang kelembaban untuk ruang budidaya jamur tiramnya dapat disesuaikan dengan daearah daratan rendah jamur tiram termasuk tumbuhan yang tidak memiliki zat hijau daun sehingga bias mengolah bahan makan sendiri. Nutrisi utama yang dibutuhkan jamur tiram adalah sumber karbon yang dapat disediakan melalui berbaai sumber seperti serbuk kayu gergaji, tanah, dan berbagai limbah organik
Pertumbuhan jamur tiram sangat tergantung pada factor fisik seperti suhu, kelembaban, cahanya dan PH media tanah kondisi tersebut adalah nilai kelembaban yang ideal dan seimbang, terlalu basah atau kering kurang baik bagi keberlangsungan hidup jamur tiram tersebut. Internet of thing atau yang di kenal juga dengan IoT, merupakan sebuah konsep yang bertujuan untuk memperluas manfaat dari konektivitas internet yag tersambung secara trus menerus. Adapun kemampuan seperti berbagai data, remote control, dan sebagainya, ermasuk juga pada benda di dunia nyata. Contohnya bahan pangan, elektronik, koleksi, peralatan apa saja, termasuk benda hidup yang semuanya tersambung pada jaringan lokal dan global melalui sensor yang tertanam dan slalu aktif. Pada dasarnya internet of thing mengacu pada benda yang dapat diidentifikasikan secara unik sebagai representasi visual dalam struktur berbasis internet. Istilah Internet Of Things awalnya di sarankan oleh Kevin Ashton pada tahun 1999 dan mulai terkenal melalui Auto-ID Center
Untuk permasalahan tersebut, maka penulis mengembangkan suatu alat pemantau budidaya jamur untuk pengembangan kulitas dan kuantitas jamur dengan memanfaatkan konsep Internet Of Things, yang dapat berkomunikasi antara satu sama lain melalui sebuah jaringan internet. Berdasarkan permasalahan diatas, maka penulis ingin mengembangkan suatu alat sederhana yang berjudul
‘MONITORING RUANGAN BUDIDAYA JAMUR MENGGUNAKAN ARDUINO BERBASIS INTERNET OF THINGS PADA PONDOK PESANTREN RIYADUL JANNAH‘
Rumusan Masalah
Berdasarkan latar belakang ,dapat disimpulkan beberapa permasalahan yang muncul yaitu :
-
Bagaimana langkah merancang alat menggunakan arduino berbasis IoT yang mampu mendukung pertumbuhan jamur ini ?
-
Bagaimana cara kerja alat pemantau budidaya jamur menggunakan arduino berbasis IoT?
-
Apakah dengan adanya alat ini dapat membantu memantau keaadan di dalam lumbung jamur ?
Ruang Lingkup Penelitian
Dari permasalahan yang ada maka penulis membatasi ruang lingkup penelitian pada
-
Factor-faktor pendukung budidaya jamur
-
Pembacaan sensor dengan arduino
-
Memberi kemudahan kepada para petani untuk dapat mengawasi keadaan lumbung jamur dengan tepat cepat dan akurat
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Tujuan dari penelitian ini adalah :
1. Tujuan individual
- Untuk memenuhi syarat kelulusan skripsi
- 2. Untuk membatu para petani jamur agar dapat mengetahui keadaan lumbung jamur setiap pagi, siag dan sore, dengan menggunakan IoT
2. Tujuan Fungsional
Untuk mengetahui keadaan di lumbungan jamur dengan dengan tepat dan akurat
3. Tujuan Operasional
Mendeteksi kandungan pada tanah untuk pembudidayaan jamur tiram denganmenggunakan mikrokontroller arduino
Manfaat Penelitian
Adapun manfaat yang dihasilkan dari penelitian ini ialah :
1. Bagi Peneliti
- Memaksimalkan dan meningkatkan inovasi dan kreatifitas dalam menciptakan sebuah karya yang mengimplementasikan ilmu teknologi informasi dan komunikasi.
- Bentuk apresiasi dan kontribusi bagi pengembang teknologi aplikasi di bidang teknologi informasi dan komunikasi.
- Memberikan kemudahan bagi para pembudidaya jamur tiram untuk melakukan pengawasan terhadap kondisi tanah bagi keberlangsungan hidup tanaman jamur tiram tersebut
2. Bagi Industri Rumahan
- Membantu mendisrinusikan kondisi tanah untuk dijadikan media penanaman jamur
- Membantu dalam proses pembudidayaan jamur tiram agar hasil yang didapatkan lebih baik dan lebih banyak perkumbungnya.
Metode Penelitian
Metode Pengumpulan Data
- Observasi (Pengamatan)
Merupakan metode pengumpulan data melalui pengamatan langsung atau peninjauan secara cermat dan langsung di lapangan atau lokasi penelitian. Penelitian ini dilakukan pada industri rumahan bubidayaan jamur tiram yang menjadi lokasi penelitian guna memperoleh data dan keterangan yang berhubungan dengan jenis penelitian.
- Wawancara
Merupakan metode pengumpulan data dengan jalan tanya jawab yang dilakukan secara sistematis dan berlandaskan kepada tujuan penelitian. Pada metode ini penulis melakukan proses tanya jawab dilakukan langsung ke pada produsen industri rumahan ditempat pembudidayaan jamur tiram miliknya.
- Metode Observasi
Merupakan metode pengumpulan data melalui pengamatan langsung ataupeninjauan secara cermat dan langsung di lapangan atau lokasi penelitian. Guna memperoleh data dan keterangan yang berhubungan dengan jenis penelitian. Adapun data yang saya ambil adalah tugas-tugas pokok di tempat pembudidayaan jamur
- Metode Studi Pustaka
Metode untuk mendapatkan informasi dengan mencatat dan mempelajari buku-buku atau literature review yang berhubungan dengan penelitian dari berbagai sumber yang tertulis maupun elektronik. Sebagian besar penulis melakukan pengumpulan data dan metode diambil dari situs-situs internet, dan sisanya dari buku cetak.
Metode Perancangan
Dalam melakukan perancangan penulis menggunakan metode Sistem Flowchart dimana tahap demi tahap proses pembuatan Alat monitoring budidaya jamur menggunakan arduino berbasis Internet Of Things dijabarkan dengan tujuan. Dan pada perancangan alat menggunakan Diagram Blok, metode ini dimaksudkan untuk bagaimana sistem itu dirancang dan alat apa saja yang dibutuhkan. Pada pembuatan alat ini, penulis menggunakan alat seperti: sensor kelembaban, sensor suhu, dan sensor gas
Metode Pengujian
Pada metode pengujian ini yang saya pakai adalah metode pengujian black box, karenaberfokus pada domain informasi dari perangkat lunak
Metode Prototipe
Metode yang dipakai adalah metode prototipe evolutionary, karena dengan evolutionary ini sistem atau produk yang sebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatas menuju produk final atau produk akhir
Sistematika Penulisan
Laporan ini terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub-sub yang akan membahas dan menguraikan masalah yang lebih terperinci. Secara garis besar penulisan ini terdiri dari :
BAB I PENDAHULUAN
Bab ini berisi tentang uraian latar belakang, perumusan masalah, tujuan dan manfaat, ruang lingkup penelitian, , metode penelitian dan sistematika penulisan
BAB II LANDASAN TEORI
Bab kedua ini berisi landasan teori sebagai konsep dasar dalampenyusunan alat dan beberapa definisi yang sesuai dengan penelitian sehingga menghasilkan karya yang bernilai ilmiah dan memiliki daya guna
BAB III ANALISA SISTEM YANG BERJALAN
Bab ketiga ini berisikan tinjauan organisasi, gambaran umum industrirumahan sejarah singkat, penjelasan tentang sejarah singkat berdiri industri rumahan tersebut dan tanggung jawab, struktur organisasi,
BAB IV RANCANGAN SISTEM YANG DI UJI COBA
Bab ini menjelaskan tentang implementasi dari sistem yang telahdirancang kemudian dilakukan pengujian atas kinerja dari sistem dan analisa terhadap komunikasi antara Arduino, dan Internet Of Things sebagai media interface untuk menerima informasi.
BAB V PENUTUP
Bab ini berisi tentang kesimpulan dan saran dari pembuatan alat dan laporan sebagai upaya untuk perbaikan kedepan.
DAFTAR PUSTAKA
DAFTAR LAMPIRAN
BAB II
Teori Umum
Konsep Dasar Perancangan Sistem
Menurut Pratama (2014:07) [1] “Sistem adalah sekumpulan prosedur yang saling berkaitan dan saling terhubung untuk melakukan suatu tugas bersama-sama.”
Menurut Eddy (2014:78) [2] “Sistem didefinisikan sebagai sekumpulan objek, ide, berikut keterkaitannya didalam mencapai tujuan.”
Berdasarkan beberapa pendapat yang terdapat di atas, maka dapat disimpulkan sistem adalah sekelompok Objek yang saling terhubung satu sama lain yang berfungsi bersama-sama untuk mencapai suatu tujuan tertentu.
2. Definisi Perancangan Sistem
Menurut Darmawan (2013:227)[3], “Perancangan Sistem adalah tahap setelah analisis dari siklus pengembangan sistem: pendefinisian dari kebutuhan-kebutuhan fungsional dan persiapan untuk rancang bangun implementasi: “menggambarkan bagaimana suatu sistem dibentuk”.
Menurut Al-Jufri (2011:141)[4], “Rancangan Sistem adalah penentuan proses dan data yang diperlukan oleh sistem baru.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan perancangan sistem adalah suatu tahapan perencanaan untuk membentuk suatu sistem agar dapat berfungsi.
3. Tujuan Perancangan Sistem
Menurut Deni Darmawan (2013:228)[3], Tahap Perancangan/Desain Sistem mempunyai 2 tujuan utama, yaitu:
- Untuk memenuhi kebutuhan pemakai sistem.
- Untuk memberikan gambaran yang jelas dan rancang bangun yang lengkap pada pemograman komputer dan ahli-ahli teknik yang terlihat (lebih condong pada disain sistem yang terperinci).
4. Tahap Perancangan Sistem
Menurut Darmawan (2013:228)[3], Tahap Perancangan/Desain Sistem mempunyai 2 tujuan utama, yaitu:
- Untuk memenuhi kebutuhan pemakai sistem.
- Untuk memberikan gambaran yang jelas dan rancang bangun yang lengkap pada pemograman komputer dan ahli-ahli teknik yang terlihat (lebih condong pada disain sistem yang terperinci).
Konsep Dasar Pengontrolan
Menurut Erinofiardi (2012) [5], “Suatu sistem control otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia(otomatis)”.
Dan sistem kontrol bisa diartikan jalinan berbagai komponen yang menyusun sebuah sistem untuk menghasilkan respon yang di inginkan terhadap perubahan waktu.
Berdasarkan Ejaan Yang Disempurnakan (EYD) pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan, pemeriksaan dan pengendalian.
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka (Open-loop Control System) dan Sistem Pengendali Loop Tertutup(Closed-loop Control System).
- Sistem Kontrol Loop Terbuka
- Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012) [5] sistem kontol loop terbuka adalah “suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontol ini nilai keluaran tidak di umpan-balikkan ke parameter pengendalian.”

Gambar 2.1 Sistem Pengendali Loop Terbuka
Sumber : Erinofiardi (2012) [5]
Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
Menurut Erinofiardi (2012) [5] sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang di lakukan”.
Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.

Gambar 2.2 Sistem Pengendali Loop Tertutup
Sumber : Erinofiardi (2012) [5]
Gambar di atas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim kealat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalikan tersebut. Dalam berbagi sistem pengendalian, sinyal input dihasilkan oleh mikrokontroller.
Konsep Dasar Prototipe
Menurut Simarmata (2010:62)[6], “Prototype adalah bagian dari produk yang mengekspresikan logika maupun fisik antarmuka eksternal yang ditampilkan”.
Menurut Darmawan (2013:229)[3], Prototipe adalah satu versi dari sebuah sistem potensial yang memeberikan ide bagi para pengembang dan calon pengguna, bagaimana sistem akan berfungsi dalam bentuk yang telah selesai.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan Prototype adalah contoh dari produk atau sistem dalam bentuk sebenarnya yang dapat dirubah sesuai keinginan sebelum direalisasikan.
Jenis-jenis Prototype secara general dibagi menjadi dua, yaitu: (Simarmata, 2010:64)[6],
- Prototipe Evolusioner (Prototype Evolusionary)
Terus-menerus disempurnakan sampai memiliki seluruh fungsionalitas yang dibutuhkan pengguna dari sistem yang baru. Prototipe ini kemudian dilanjutkan produksi. Jadi satu prototipe evolutioner akan menjadi sistem aktual. - Prototipe Persyaratan (Requirement Prototype)
dikembangkan sebagai satu cara untuk mendefinisikan persyaratan-persyaratan fungsional dari sistem baru ketika pengguna tidak mampu mengungkapkan apa yang mereka inginkan. Dengan meninjau prototipe persyaratan seiring dengan ditambahkannya fitur-fitur, pengguna akan mampu mendefinisikan pemrosesan yang dibutuhkan dari sistem yang baru. Ketika persyaratan ditentukan, prototipe persyaratan telah mencapai tujuannya dan proyek lain akan dimulai untuk pengembangan sistem baru. Oleh karena itu, suatu prototipe tidak selalu menjadi sistem aktual.
Langkah-langkah pembuatan Prototype Evolutionary ada empat langkah, yaitu :
- Mengidentifikasi kebutuhan pengguna. Pengembang mewawancarai pengguna untuk mendapatkan ide mengenai apa yang diminta dari sistem.
- Membuat satu prototipe. Pengembang mempergunakan satu alat prototyping atau lebih untuk membuat prototipe. Contoh dari alat-alat prototyping adalah generator aplikasi terintegrasi dan toolkit prototyping. Generator aplikasi terintegrasi (integrated application generator) adalah sistem peranti lunak siap pakai yang mampu membuat seluruh fitur yang diinginkan dari sistem baru—menu, laporan, tampilan, basis data, dan seterusnya. Toolkit prototyping meliputi sistem-sistem peranti lunak terpisah, seperti spreadsheet elektronik atau sistem manajemen basis data, yang masing-masing mampu membuat sebagian dari fitur-fitur sistem yang diinginkan.
- Menentukan apakah prototipe dapat diterima, pengembang mendemonstrasikan prototipe kepada para pengguna untuk mengetahui apakah telah memberikan hasil yang memuaskan, jika sudah, langkah emapat akan diambil; jika tidak, prototipe direvisi dengan mengulang kembali langkah satu, dua, dan tiga dengan pemahaman yang lebih baik mengenai kebutuhan pengguna.
- Menggunakan prototipe, prototipe menjadi sistem produksi.
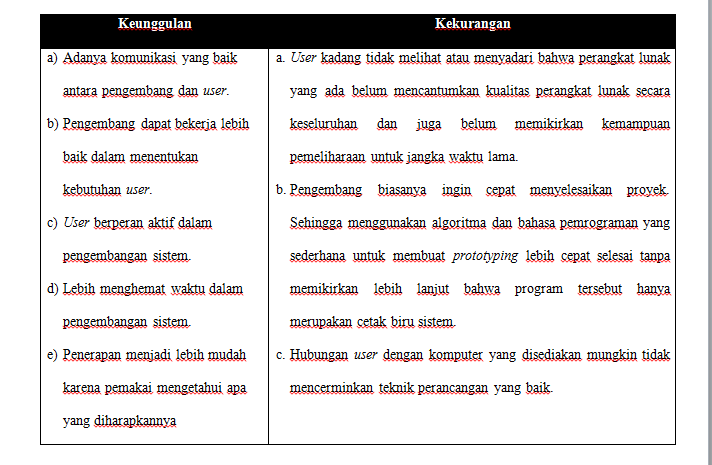
Kelebihan dan Kelemahan prototyping adalah sebagai berikut:
Tabel 2.1 Keunggulan dan Kekurangan Prototipe

Sumber: Simarmata (2010:68)[6]
Internet Of Thing
Menurut Ashton, (2010: 312)[7], Internet of Things, atau dikenal juga dengan singkatan IoT, merupakan sebuah konsep yang bertujuan untuk memperluas manfaat dari konektivitas internet yang tersambung secara terus-menerus. Adapun kemampuan seperti berbagi data, remote control, dan sebagainya, termasuk juga pada benda di dunia nyata. Contohnya bahan pangan, elektronik, koleksi, peralatan apa saja, termasuk benda hidup yang semuanya tersambung ke jaringan lokal dan global melalui sensor yang tertanam dan selalu aktif. Pada dasarnya, Internet of Things mengacu pada benda yang dapat diidentifikasikan secara unik sebagai representasi virtual dalam struktur berbasis Internet. Istilah Internet of Things awalnya disarankan oleh Kevin Ashton pada tahun 1999 dan mulai terkenal melalui Auto-ID Center di MIT.
Pada bulan Juni 2010 Ashton berkomentar. "Hari ini komputer dan manusia, hampir sepenuhnya tergantung pada Internet untuk segala informasi yang semua terdiri dari sekitar 50 petabyte (satu petabyte adalah 1.024 terabyte) data yang tersedia pada Internet dan pertama kali digagaskan dan diciptakan oleh manusia. Dari mulai mengetik, menekan tombol rekam, mengambil gambar digital atau memindai kode bar.
Diagram konvensional dari Internet meninggalkan router menjadi bagian terpenting dari semuanya. Masalahanya adalah orang memiliki waktu, perhatian dan akurasi terbatas. Mereka semua berarti tidak sangat baik dalam menangkap berbagai data tentang hal di dunia nyata. Dan itu adalah masalah besar.
Dari segi fisik dan begitu juga lingkungan kita. Gagasan dan informasi begitupenting, tetapi banyak lagi hal yang penting. Namun teknologi informasi saat ini sangat tergantung pada data yang berasal dari orang-orang sehingga komputer kita tahu lebih banyak tentang semua ide dari hal-hal tersebut.
Jika kita memiliki komputer yang begitu banyak tahu tentang semua hal itu.Menggunakan data yang berkumpul tanpa perlu bantuan dari kita. Kita dapat melacak dan menghitung segala sesuatu dan sangat mengurangi pemborosan, kerugian, dan biaya. Kita akan mengetahui kapan hal itu diperlukan untuk mengganti, memperbaiki atau mengingat, dan apakah mereka menjadi terbarui atau melewati yang terbaik.
Internet of Things memiliki potensi untuk mengubah dunia seperti pernah dilakukan oleh Internet, bahkan mungkin lebih baik.
Penelitian pada Internet of Things masih dalam tahap perkembangan. Oleh karenaitu, tidak ada definisi standar dari Internet of Things.Terdapat juga berbagai definisi yang dirumuskan oleh peneliti yang berbeda serta tercantum dalam survei."
Pada bulan Juni 2010 Ashton berkomentar. "Hari ini komputer dan manusia, hampir sepenuhnya tergantung pada Internet untuk segala informasi yang semua terdiri dari sekitar 50 petabyte (satu petabyte adalah 1.024 terabyte) data yang tersedia pada Internet dan pertama kali digagaskan dan diciptakan oleh manusia. Dari mulai mengetik, menekan tombol rekam, mengambil gambar digital atau memindai kode bar.
Diagram konvensional dari Internet meninggalkan router menjadi bagian terpenting dari semuanya. Masalahanya adalah orang memiliki waktu, perhatian dan akurasi terbatas. Mereka semua berarti tidak sangat baik dalam menangkap berbagai data tentang hal di dunia nyata. Dan itu adalah masalah besar.
Dari segi fisik dan begitu juga lingkungan kita. Gagasan dan informasi begitupenting, tetapi banyak lagi hal yang penting. Namun teknologi informasi saat ini sangat tergantung pada data yang berasal dari orang-orang sehingga komputer kita tahu lebih banyak tentang semua ide dari hal-hal tersebut.
Jika kita memiliki komputer yang begitu banyak tahu tentang semua hal itu.Menggunakan data yang berkumpul tanpa perlu bantuan dari kita. Kita dapat melacak dan menghitung segala sesuatu dan sangat mengurangi pemborosan, kerugian, dan biaya. Kita akan mengetahui kapan hal itu diperlukan untuk mengganti, memperbaiki atau mengingat, dan apakah mereka menjadi terbarui atau melewati yang terbaik.
Internet of Things memiliki potensi untuk mengubah dunia seperti pernah dilakukan oleh Internet, bahkan mungkin lebih baik.
Penelitian pada Internet of Things masih dalam tahap perkembangan. Oleh karenaitu, tidak ada definisi standar dari Internet of Things.Terdapat juga berbagai definisi yang dirumuskan oleh peneliti yang berbeda serta tercantum dalam survei."
Pada bulan Juni 2010 Ashton berkomentar. "Hari ini komputer dan manusia, hampir sepenuhnya tergantung pada Internet untuk segala informasi yang semua terdiri dari sekitar 50 petabyte (satu petabyte adalah 1.024 terabyte) data yang tersedia pada Internet dan pertama kali digagaskan dan diciptakan oleh manusia. Dari mulai mengetik, menekan tombol rekam, mengambil gambar digital atau memindai kode bar.
Diagram konvensional dari Internet meninggalkan router menjadi bagian terpenting dari semuanya. Masalahanya adalah orang memiliki waktu, perhatian dan akurasi terbatas. Mereka semua berarti tidak sangat baik dalam menangkap berbagai data tentang hal di dunia nyata. Dan itu adalah masalah besar.
Dari segi fisik dan begitu juga lingkungan kita. Gagasan dan informasi begitupenting, tetapi banyak lagi hal yang penting. Namun teknologi informasi saat ini sangat tergantung pada data yang berasal dari orang-orang sehingga komputer kita tahu lebih banyak tentang semua ide dari hal-hal tersebut.
Jika kita memiliki komputer yang begitu banyak tahu tentang semua hal itu.Menggunakan data yang berkumpul tanpa perlu bantuan dari kita. Kita dapat melacak dan menghitung segala sesuatu dan sangat mengurangi pemborosan, kerugian, dan biaya. Kita akan mengetahui kapan hal itu diperlukan untuk mengganti, memperbaiki atau mengingat, dan apakah mereka menjadi terbarui atau melewati yang terbaik.
Internet of Things memiliki potensi untuk mengubah dunia seperti pernah dilakukan oleh Internet, bahkan mungkin lebih baik.
Penelitian pada Internet of Things masih dalam tahap perkembangan. Oleh karenaitu, tidak ada definisi standar dari Internet of Things.Terdapat juga berbagai definisi yang dirumuskan oleh peneliti yang berbeda serta tercantum dalam survei."
Pada bulan Juni 2010 Ashton berkomentar. "Hari ini komputer dan manusia, hampir sepenuhnya tergantung pada Internet untuk segala informasi yang semua terdiri dari sekitar 50 petabyte (satu petabyte adalah 1.024 terabyte) data yang tersedia pada Internet dan pertama kali digagaskan dan diciptakan oleh manusia. Dari mulai mengetik, menekan tombol rekam, mengambil gambar digital atau memindai kode bar.
Diagram konvensional dari Internet meninggalkan router menjadi bagian terpenting dari semuanya. Masalahanya adalah orang memiliki waktu, perhatian dan akurasi terbatas. Mereka semua berarti tidak sangat baik dalam menangkap berbagai data tentang hal di dunia nyata. Dan itu adalah masalah besar.
Dari segi fisik dan begitu juga lingkungan kita. Gagasan dan informasi begitupenting, tetapi banyak lagi hal yang penting. Namun teknologi informasi saat ini sangat tergantung pada data yang berasal dari orang-orang sehingga komputer kita tahu lebih banyak tentang semua ide dari hal-hal tersebut.
Jika kita memiliki komputer yang begitu banyak tahu tentang semua hal itu.Menggunakan data yang berkumpul tanpa perlu bantuan dari kita. Kita dapat melacak dan menghitung segala sesuatu dan sangat mengurangi pemborosan, kerugian, dan biaya. Kita akan mengetahui kapan hal itu diperlukan untuk mengganti, memperbaiki atau mengingat, dan apakah mereka menjadi terbarui atau melewati yang terbaik.
Internet of Things memiliki potensi untuk mengubah dunia seperti pernah dilakukan oleh Internet, bahkan mungkin lebih baik.
Penelitian pada Internet of Things masih dalam tahap perkembangan. Oleh karenaitu, tidak ada definisi standar dari Internet of Things.Terdapat juga berbagai definisi yang dirumuskan oleh peneliti yang berbeda serta tercantum dalam survei."
Pada bulan Juni 2010 Ashton berkomentar. "Hari ini komputer dan manusia, hampir sepenuhnya tergantung pada Internet untuk segala informasi yang semua terdiri dari sekitar 50 petabyte (satu petabyte adalah 1.024 terabyte) data yang tersedia pada Internet dan pertama kali digagaskan dan diciptakan oleh manusia. Dari mulai mengetik, menekan tombol rekam, mengambil gambar digital atau memindai kode bar.
Diagram konvensional dari Internet meninggalkan router menjadi bagian terpenting dari semuanya. Masalahanya adalah orang memiliki waktu, perhatian dan akurasi terbatas. Mereka semua berarti tidak sangat baik dalam menangkap berbagai data tentang hal di dunia nyata. Dan itu adalah masalah besar.
Dari segi fisik dan begitu juga lingkungan kita. Gagasan dan informasi begitupenting, tetapi banyak lagi hal yang penting. Namun teknologi informasi saat ini sangat tergantung pada data yang berasal dari orang-orang sehingga komputer kita tahu lebih banyak tentang semua ide dari hal-hal tersebut.
Jika kita memiliki komputer yang begitu banyak tahu tentang semua hal itu.Menggunakan data yang berkumpul tanpa perlu bantuan dari kita. Kita dapat melacak dan menghitung segala sesuatu dan sangat mengurangi pemborosan, kerugian, dan biaya. Kita akan mengetahui kapan hal itu diperlukan untuk mengganti, memperbaiki atau mengingat, dan apakah mereka menjadi terbarui atau melewati yang terbaik.
Internet of Things memiliki potensi untuk mengubah dunia seperti pernah dilakukan oleh Internet, bahkan mungkin lebih baik.
Penelitian pada Internet of Things masih dalam tahap perkembangan. Oleh karenaitu, tidak ada definisi standar dari Internet of Things.Terdapat juga berbagai definisi yang dirumuskan oleh peneliti yang berbeda serta tercantum dalam survei."
Jamur
Menurut trio untung priyadi (2013:3)[8], definisi jamur tersebut bukanlah sesuatu yang mutlak. Setiap ahli mikrologi mungkin punya definisi yang berbeda dan bukan tidak munggkin pada masa yang akan datang definisi tersebut akan berubah seiring dengan perkembangan ilmu pengetahuan mengenai jamur (mycology).
Menurut terminologi yang paling umum, didefinisikan sebagi mahluk hidup non tumbuhan, berinti sejati, tidak berklorofil, berbentuk talus (tidak dapat di bedakan antara akar, batang, dan daun), tumbuh somatiknya berupa sulur atau benang-benang halus, berspora, serta memperoleh makannya dengan cara menyerap makanan dari lingkungan melalui seluruh permukaan tubuh somatiknya.
Jamur merupakan makan sehat yang kaya manfaat. Sebagai bahan pangan, janur memiliki nilai takaran gizi lengkap dengan harga yang terjangkau. Hal tersebut menjadikan jamur sebagai salah satu kebutuhan pangan yang kerap diburu masyarakat. Sayangnya, hingga saat kini tida sedikit masyarakat yang masih salah presepsi dan memiliki presepsi buruk tentang jamur. Jika mendengar kata jamur, pikirannya akan tertuju pada jenis penyakit yang menyerang kulit atau tanaman. Hal ini diperparah dengan reputasi jamur yang dianggap beracun dan seolah-olah mengancam kesehatan masyarakat.
Budidaya
Menurut priyanto (2013:12) [9],Budidaya tanaman adalah suatu atau beberapa teknik dalam usaha pembibitan atau mengembangkan atau suatu jenis tanaman dengan cara-cara tertentu
Monitoring
Menurut fendy gerry foe (2013:10)[10], monitoring adalah penilaian secaraterus menerus terhadap fungsi kegiatan-kegiatan Program –program di dalam hal jadwala penggunaaan input /masukan data oleh kelompok sasaran berkaiatan dengan harapan –harapan yang telah direncanakan.
Konsep Dasar Flow Chart
1. Definisi Flow Chart
Menurut Sulindawati dan Muhammad Fathoni (2010:8)[11], “Flowchart adalah penggambaran secara grafik dari langkah-langkah dau urutan-urutan prosedur dari suatu program.
Menurut Adelia dan Jimmy Setiawan (2011:116)[12], “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Dari pendapat di atas dapat disimpulkan bahwa Flowchart adalah bentuk gambar/diagram yang mempunyai aliran satu atau dua arah secara sekuensial.
Flowchart biasanya mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan di evaluasi lebih lanjut. Bila seorang analisi dan programmer akan membuat flowchart, ada beberapa petunjuk yang harus diperhatikan.
2. Cara Membuat Flow Chart
Ada beberapa petunjuk dalam pembuatan Flow chart Menurut Menurut Sulindawati dan Muhammad Fathoni (2010:8): [11],
- Flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
- Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapat dimengerti oleh pembacanya.
- Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas.
- Setiap langkah dari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.
- Setiap langkah dari aktifitas harus berada pada urutan yang benar.
- Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
- Gunakan simbol-simbol flowchart yang standar.
3. Jenis-Jenis Flowchart
Menurut Sulindawati (2010:8)[11], Flowchart terbagi atas lima jenis, yaitu:
- Flowchart Sistem (System Flowchart)
Flowchart Sistem merupakan bagan yang menunjukan alur kerja atau apa yang sedang dikerjakan di dalam sistemsecara keseluruhan dan menjelaskan urutan dari prosedur-prosedur yang ada di dalam sistem. Dengan kata lain, flowchart ini merupakan deskripsi secara grafik dari urutan prosedur-prosedur yang terkombinasi yang membentuk sistem.
Flowchart sistem terdiri dari tiga data yang mengalir melalui sistem dan proses yang mentransformasikan data itu. Data dan proses dalam flowchart sistem dapat digambarkan secara online (dihubungkan langsung dengan komputer) atau offline (tidak dihubungkan langsung dengan komputer, misalnya mesin tik, cash register atau kalkulator). - Flowchart Paperwork (Document Flowchart)
Flowchart Paperwork menelusuri alur dari data yang ditulis melalui sistem. Flowchart Paperwork sering disebut juga dengan Flowchart Dokumen. Kegunaan utamanya adalah untuk menelusuri alur form dan laporan sistem dari satu bagian ke bagian lain baik bagaimana alur form dan laporan diproses, dicatat atau disimpan. - Flowchart Skematik (Schematic Flowchart)
Flowchart Skematik mirip dengan Flowchart Sistem yang menggambarkan suatu sistem atau prosedur. Flowchart Skematik ini bukan hanya menggunakan simbol-simbol flowchart standart, tetapi juga menggunakan gambar-gambar komputer, peripeheral, form-form atau peralatan lain yang digunakan dalam sistem.
Flowchart Skemantik digunakan sebagai alat komunikasi antara analis sistem dengan seseorang yang tidak familiar dengan simbol-simbol flowchart yang konvensional. Pemakaian gambar sebagai ganti dari simbol-simbol flowchart akan menghemat waktu yang dibutuhkan oleh sesorang untuk mempelajari simbol abstrak sebelum dapat mengerti flowchart. - Flowchart Program (Program Flowchart)
Flowchart Program dihasilkan dari Flowchart Sistem. Flowchart Program merupakan keterangan yang lebih rinci tentang bagaimana setiap langkah program atau prosedur sesungguhnya dilaksanakan. Flowchart ini menunjukan setiap langkah program atau prosedur dalam urutan yang tepat saat terjadi. Programmer menggunakan Flowchart Program untuk menggambarkan urutan instruksi dari program komputer. Analisa sistem menggunakan flowchart program untuk menggambarkan urutan tugas-tugas pekerjaan dalam suatu prosedur atau operasi. - Flowchart Proses (Process Flowchart)
Flowchart Proses merupakan teknik menggambarkan rekayasa industrial yang memecah dan menganalisis langkah-langkah selanjutnya dalam suatu prosedur atau sistem. Flowchart Proses memiliki lima simbol khusus. Flowchart Proses digunakan oleh perekayasa industrial dalam mempelajari dan mengembangkan proses-proses manufacturing. Dalam analisis sistem, Flowchart ini digunakan secara efektif untuk menelusuri alur suatu laporan.
Konsep Dasar Prototipe
Menurut Simarmata (2010:62)[6], “Prototype adalah bagian dari produk yang mengekspresikan logika maupun fisik antarmuka eksternal yang ditampilkan”.
Menurut Tom Schrijvers,Peter Thiemann (2012:43)[13], “Prototype is a toy implementation of the system”. (Prototype adalah sebuah implementasi tiruan dari sebuah sistem)
Berdasarkan kedua definisi di atas, maka dapat disimpulkan Prototype adalah contoh dari produk atau sistem dalam bentuk sebenarnya yang dapat dirubah sesuai keinginan sebelum direalisasikan.
Jenis-jenis Prototype secara general dibagi menjadi dua, yaitu: Menurut Simarmata (2010:64)[6]
- Rapid Throwaway Prototyping
Pendekatan pengembangan perangkat keras/Iunak ini dipopulerkan Soleh Gomaa dan Scoot (1981) yang saat ini telah digunakan secara luas oleh industri, terutama di dalam pengembangan aplikasi. Pendekatan ini biasanya digunakan dengan item yang berisiko tinggi (high-risk) atau dengan bagian dari sistem yang tidak dimengerti secara keseluruhan oleh para tim pengembang. Pada pendekatan ini, Prototype "quick and dirty" dibangun, diverifikasi oleh kansumen, dan dibuang hingga Prototype yang diinginkan tercapai pada saat proyek berskala besar dimulai. - Prototype Evolusioner
Pada pendekatan evolusioner, suatu Prototype berdasarkan kebutuhan dan pemahaman secara umum. Prototype kemudian diubah dan dievolusikan daripada dibuang. Prototype yang dibuang biasanya digunakan dengan aspek sistem yang dimengerti secara luas dan dibangun atas kekuatan tim pengembang. Prototype ini juga didasarkan atas kebutuhan prioritas, kadang-kadang diacu sebagai “chunking” pada pengembang aplikasi (Hough, 1993).
Kelebihan dan Kelemahan prototyping adalah sebagai berikut :
Tabel 2.2 Kelebihan dan Kekurangan Prototype
Sumber: Simarmata (2010:68)[6]
Konsep Dasar Data Flow Diagram (DFD)
1. Definisi Data Flow Diagram (DFD)
Menurut Darmawan (2013:233)[14], “data flow diagram (DFD) adalah respresentasi grafik dari sebuah sistem. DFD menggambarkan komponen-komponen sebuah sistem, aliran-aliran data dimana komponen-komponen tersebut, asal, tujuan dan penyimpanan dari data tersebut.”
Menurut Rosa (2013:70)[15], “data flow diagram (DFD) adalah respresentasi grafik yang menggambarkan aliran informasi dan transformasi informasi yang diaplikasikan sebagai data yang mengalir dari masukan (input) dan keluaran (output).”
Berdasarkan kedua definisi di atas, maka dapat disimpulkan data flow diagram (DFD) adalah diagram yang menggambarkan suatu sistem pada aliran informasi dari input dan output yang saling terhubung.
2. Simbol Data Flow Diagram (DFD)
Menurut Sutabri (2012:117)[16], simbol atau lambang yang digunakan dalam membuat data flow diagram ada 4 (empat) buah, yaitu sebagai berikut:
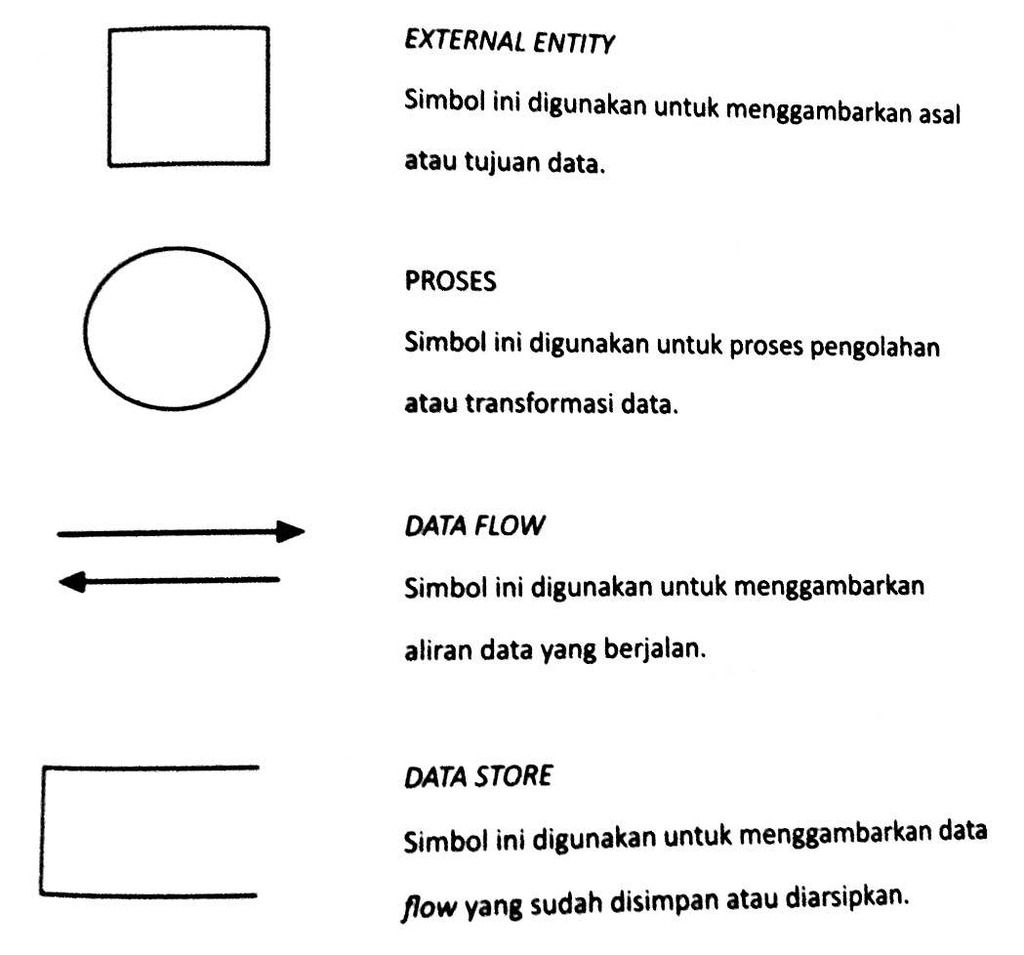
Sumber: Sutabri (2012:117)
Gambar 2.13 Simbol Data Flow Diagram (DFD)
3. Aturan Main Data Flow Diagram (DFD)
Menurut Sutabri (2012:119)[16], Bentuk rambu-rambu atau aturan main yang baku dan berlaku dalam penggunaan data flow diagram untuk membuat model sistem adalah sebagai berikut:
a. Di dalam data flow diagram tidak boleh menghubungkan antara satu external entity dengan external entity lainnya.
b. Di dalam data flow diagram tidak boleh menghubungkan data store yang satu dengan data store yang lainnya secara langsung.
c. Di dalam data flow diagram tidal boleh menghubungkan data store dengan external entity secara langsung.
d. Setiap proses harus ada memiliki data flow yang masuk dan ada juga data flow yang keluar.
4. Teknik Membuat Data Flow Diagram (DFD)
Menurut Sutabri (2012:119)[16], Teknik atau cara yang lazim digunakan di dalam membuat data flow diagram adalah:
a. Mulai dari yang umum atau tingkatan yang lebih tinggi, kemudian diuraikan atau dijelaskan sampai yang lebih detail atau tingkatan yang lebih rendah, yang lebih dikenal
dengan istilah top-down analysis.
b. Jabarkan proses yang terjadi di dalam data flow diagram sedetail mungkin sampai tidak dapat diuraikan lagi.
c. Periharalah konsistensi proses yang terjadi di dalam DFD, mulai dari diagram yang tingkatannya leih tinggi sampai dengan diagram yang tingkatannya lebih rendah.
d. Berikan label yang bermakna untuk setiap simbol yang digunakan seperti:
1. Nama yang jelas untuk External Entity
2. Nama yang jelas untuk Proses
3. Nama yang jelas untuk Data Flow
4. Nama yang jelas untuk Data Store
5. Tahapan Data Flow Diagram (DFD)
Menurut Sutabri (2012:120)[16], langkah-langkah di dalam membuat data flow diagram dibagi menjadi 3 (tiga) tahap atau tingkat konstruksi DFD, yaitu sebagai berikut:
a. Diagram Konteks
Diagram ini dibuat untuk menggambarkan sumber serta tujuan data yang akan diproses atau dengan kata lain diagram tersebut digunakan untuk menggambarkan sistem
secara umum atau global dari keseluruhan sistem yang ada.
b. Diagram Nol
Diagram ini dibuat untuk menggambarkan tahapan proses yang ada di dalam diagram konteks, yang penjabarannya lebih terperinci.
c. Diagram Detail
Diagram ini dibuat untuk menggambarkan arus data secara lebih mendetail lagi dari tahapan proses yang ada di dalam diagram nol.
Konsep Dasar Literature Review
1. Definisi Literatur Review,
Menurut Guritno, Sudaryono, Untung Raharja (2011:86)[17], “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan. Jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling aktual, maka kita tidak perlu melakukan penelitian yang sama.
Menurut Semiawan (2010:104)[18], mendefinisikan Literature Review sebagai berikut:
Literature review adalah bahan yang tertulis berupa buku, jurnal yang membahas tentang topik yang hendak diteliti. Tinjauan pustaka membantu peniliti untuk melihat ide-ide, pendapat, dan kritik tentang topik tersebut yang sebelum dibangun dan dianalisis oleh para ilmuwan sebelumnya. Pentingnya tinjauan pustaka untuk melihat dan menganalisa nilai tambah penelitian ini dibandingkan dengan penelitian-penelitian sebelumnya.
Berdasarkan beberapa pendapat diatas dapat disimpulkan Literature Review adalah memperdalam penegetahuan tentang bidang yang diteliti guna memperjelas masalah penelitian.
2. Langkah-Langkah Literatur Review
Menurut Guritno, Sudaryono, Untung Raharja (2011:87)[17], dalam melakukan kajian literature review, langkah-langkah yang dilakukan sebagai berikut:
- Mengidentifikasi kesenjangan (indentify gaps) penelitian ini.
- Menghindari membuat ulang (reinventing the wheel) sehingga banyak menghemat waktu serta menghindari kesalahan yang pernah dilakukan oleh orang lain.
- Mengidentifikasi metode yang pernah dilakukan dan relevan terhadap penelitian ini.
- Menerusakan capaian penelitian sebelumnya sehingga dengan adanya studi pustaka ini, penelitian yang akan dilakukan dapat dibangun di atas platform pengetahuan atau ide yang sudah ada.
- Mengetahui orang lain yang ahli dan mengerjakan di area penelitian yang sama sehingga dapat terjaring dalam komunitas yang dapat memberikan kontribusi sumber daya berharga.
3. Jenis-Jenis Penelitian
Menurut Guritno (2011:22)[17], jenis-jenis penelitian yaitu:
- Jenis-jenis penelitian berdasarkan fungsinya
Secara umum penelitian mempunyai dua fungsi utama, yaitu mengembangkan ilmu pengetahuan dan memperbaiki praktik. - Penelitian Dasar
Penelitian dasar (basic research) disebut pula penelitian murni (pure research) atau penelitian pokok (fundamental research). Penelitian ini diarahkan pada pengujian teori dengan hanya sedikit atau bahkan tanpa menghubungkan hasilnya untuk kepentingan praktik. - Penelitian Terapan
Penelitian terapan (applied research) berkenaan dengan kenyataan-kenyataan praktis, yaitu penerapan dan pengembangan pengetahuan yang dihasilkan oleh penelitian dasar dalam kehidupan nyata. - Penelitian Evaluasi
Penelitian evaluasi (evaluation research) fokus pada suatu kegiatan dalam unit (site) tertentu. Kegiatan tersebut dapat berbentuk program, proses, ataupun hasil kerja; sedangkan unit dapat berupa tempat, organisasi, ataupun lembaga. - Jenis-jenis penelitian berdasarkan tujuannya
Selain berdasarkan pendekatan dan fungsinya, penelitian dapat pula dibedakan berdasarkan tujuan, yaitu:
Tabel 2.3 Perbedaan Antara Penelitian Dasar, Terapan, dan Evaluasi
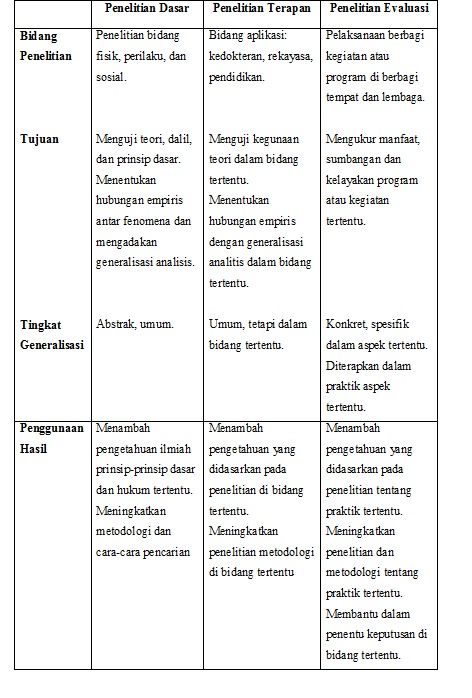
Sumber: Guritno (2011:26)[17]
- Penelitian Deskriptif
Penelitian deskriptif (descriptive research) bertujuan mendeskripsikam suatu keadaan atau fenomena apa adanya. - Penelitian Prediktif
Penelitian prediktif (predictive research). Studi ini bertujan memprediksi atau memperkirakan apa yang akan terjadi atau berlangsung pada waktu mendatang berdasarkan hasil analisis keadaan saat ini. - Penelitian Improftif
Penelitian improftif (improvetive research) bertujuan memperbaiki, meningkatkan, atau menyempurnakan keadaan, kegiatan, atau pelaksanaan suatu program. - Penelitian Eksplanatif
Penelitian eksplanatif dilakukan ketika belum ada atau belum banyak penelitian dilakukan terhadap masalah yang bersangkutan. - Penelitian Eksperimen
Penelitian eksperimen merupakan satu-satunya metode penelitian yang benar-benar dapat menguji hipotesis mengenai hubungan sebab-akibat. - Penelitian Ex Post Facto
Ex post facto berarti setelah kejadian. Secara sederhana, dalam penelitian ex post facto, penelitian menyelidiki permasalahan dengan mempelajari atau meninjau variable-variabel. - Penelitian Partisipatori
Bonnie J. Cain, penulis buku Parsticipatory Research; Research with Historical Consciousness, mengatakan bahwa definisi yang semakin luas tentang penelitian pastisipatori berada dalam istilah yang berciri negative serta dalam tindakan atau praktik yang ingin kita hindari atau atasi. - Penelitian dan Pengembangan
Metode penelitian dan pengmebangan atau dalam istilah bahasa Inggrisnya research and development adalah metode penelitian yang bertujuan menghasilkan produk tertentu serta menguji efektivitas produk tersebut.
4. Tujuan Literatur Review
Menurut Hermawan (2009:45)[19], tinjauan pustaka berisi penjelasan secara sistematik mengenai hubungan antara variabel untuk menjawab perumusan masalah penelitian. Tinjauan pustaka dalam suatu penelitian memiliki beberapa tujuan, yaitu:
- Untuk berbagi informasi dengan para pembaca mengenai hasil-hasil penelitian sebelumnya yang erat kaitannya dengan penelitian yang sedang kita laporkan.
- Untuk menghubungkan suatu penelitian ke dalam pembahasan yang lebih luas serta terus berlanjut sehingga dapat megisi kesenjangan-kesenjangan serta memperluas atau memberikan kontribusi terhadap penelitian-penelitian sebelumnya.
- Menyajikan suatu kerangka untuk menunjukan atau meyakinkan pentingnya penelitian yang dilakukan dan untuk membandingkan hasil atau temuan penelitian dengan temuan-temuam penelitian lain dengan topik serupa.
Konsep Dasar Elisitasi
1. Definisi Elisitasi
Menurut Sommerville and Sawyer (1997) dalam Siahaan (2012:66) [20], “Elisitasi kebutuhan adalah sekumpulan aktivitas yang ditunjukkan untuk menemukan kebutuhan suatu sistem melalui komunikasi dengan pelanggan, pengguna sistem, dan pihak lain yang memiliki kepentingan dalam pengembangan sistem.
Menurut Guritno (2011:302)[17], “Elisitasi merupakan rancangan yang dibuat berdasarkan sistem baru yang diinginkan oleh pihak manajemen terkait dan disanggupi oleh penulis untuk di eksekusi”.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan elisitasi adalah suatu rancangan pada sistem baru yang diinginkan pengguna sistem dan pihak yang terkait untuk pengembangan sistem.
2. Tahap-Tahap Elisitasi
Menurut Guritno (2011:302)[17] elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu :
- Tahap I
Berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara. - Tahap II
Hasil pengklasifikasian elisitasi tahap I berdasarkan metode MDI. Metode MDI bertujuan memisahkan antara rancangan sistem yang penting dan harus ada sistem baru dengan rancangan yang disanggupi oleh penulis untuk di eksekusi. M pada MDI berarti mandatory (penting). Maksudnya, requirement tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru. D pada MDI berarti desirable, maksudnya requirement tersebut tidak terlalu penting dan boleh dihilangkan. Namun, jika requirement tersebut digunakan dalam pembentukan sistem maka akan membuat sistem tersebut lebih sempurna. I pada MDI berarti inessential, maksudnya requirement tersebut bukanlah bagian sistem yang dibahas, tetapi bagian dari luar sistem. - Tahap III
Merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali melalui TOE, yaitu: - T artinya teknikal, bagaimana tata cara atau teknik pembuatan requirement dalam sistem disusulkan.
- O artinya operasional, bagaimana tata cara pengguna requirement dalam sistem akan dikembangkan.
- E artinya ekonomi, berapakah biaya yang diperlukan guna membanguan requirement didalam sistem.
- High (H) : Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal. Maka requirement tersebut harus di eliminasi.
- Middle (M) : Mampu dikerjakan.
- Low (L) : Mudah dikerjakan.
- Final Draft Elisitasi
Final draft elisitasi merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan dikembangkan.
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu:
3. Requirement Elicitation
Menurut Guritno (2011) [17] Requirement Elicitation adalah proses dalam menemukan atau mendapatkan kebutuhan sistem melalui komunikasi dengan customer, system users, dan pihak lain yang berhubungan pada sistem yamg akan dikembangkan. Requirement Elicitation didefinisikan sebagai proses mengidentifikasikan kebutuhan dan menjembatani perbedaan diantara kelompok-kelompok yang terlibat. Tujuannya menggambarkan dan menyaring kebutuhan untuk menemukan batasan kelompok-kelompok tersebut.
Teori Khusus
Konsep Dasar Robot
1. Definisi Robot
Menurut Beni Anggoro (2013:2),[21], "Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, atau menggunakan program yang telah didefinisikan terlebih dahulu".
Pertama kali kata robota diperkenalkan oleh Karel Capek dalam sebuah pentas sandiwara pada tahun 1921 yang berjudul RUR (Rossum's Universal Robot)". Pentas ini mengisahkan mesin yang menyerupai manusia yang dapat bekerja tanpa lelah yang kemudian memberontak dan menguasai manusia. Istilah robot ini kemudian mulai terkenal dan digunakan untuk menggantikan istilah yang dikenal saat itu yaitu automation. Dari berbagai litelatur robot dapat didefinisikan sebagai sebuah alat mekanik yang dapat diprogram berdasarkan informasi dari lingkungan (melalui sensor) sehingga dapat melaksanakan beberapa tugas tertentu baik secara otomatis ataupun tidak sesuai program yang di inputkan berdasarkan logika.
2. Sejarah dan Perkembangan Robot
Robot berasal dari kata robota yang dalam bahasa Ceko yang berarti budak, pekerja atau kuli. Robot pada awalnya diciptakan untuk mengantikan kerja manusia untuk sesuatu yang berulang, membutuhkan ketepatan yang tinggi dan juga untuk menggantikan manusia bila harus berhubungan dengan daerah berbahaya. Penggunaan robot lebih banyak terletak pada industri, misalnya untuk proses welding pada industri otomotif. Selain pada industri, penggunaan robot semakin berkembang luas. Sementara itu, pada dunia pendidikan di tingkat universitas telah dilakukan berbagai macam kontes yang memacu para akademisi dan mahasiwa dalam melakukan riset tentang robot. Kedepannya, robot akan semakin berkembang sehingga mampu bergerak dan berpikir seperti manusia berdasarkan logika-logika pemograman yang diinputkan.
Seiring berkembangnya teknologi, berbagai robot dibuat dengan spesialisasi atau keistimewaan tertentu. Robot dengan keistimewaan tertentu sangat erat kaitannya dengan pemenuhan kebutuhan dalam dunia industri modern, dimana industri modern menuntut adanya suatu alat dengan kemampuan tinggi yang dapat membantu menyelesaikan pekerjaan manusia ataupun menyelesaikan pekerjaan yang tidak mampu diselesaikan manusia. Pemanfaatan teknologi robot mempunyai sisi lain yang mendatangkan ancaman bagi sebagian orang, karena kehilangan kesempatan kerja. Dari survei yang dilakukan terhadap pemakai robot di Inggris, penghematan tenaga kerja ditulis sebagai faktor terpenting dalam mengambil keputusan untuk mengadopsi robot. Meskipun demikian, walau beberapa pekerjaan dan tugas dihasilkan dengan campur tangan robot, tetapi tedapat kecenderungan untuk tidak menggantikan tenaga manusia seluruhnya. Secara teoritis robot dimasukkan bukan pada faktor produksi yang berupa masukan buruh, melainkan pada masukan modal.
Negara yang paling aktif mengadakan penelitian mengenai berbagai macam robot ini adalah Jepang. Hal ini tak lain karena Jepang juga gigih dalam melakukan penelitian teknologi infrastruktur seperti komponen dan piranti mikro (microdevices) yang akhirnya bidang ini terbukti sebagai inti dari pengembangan robot modern. Sebenarnya, robot bukanlah 'barang baru' bagi masyarakat Jepang. Robot pertama Jepang sudah diciptakan berabad-abad yang lalu. Tentunya tidak dengan bentuk yang ada saat ini. Mulai dari robot yang bisa menyirami sawah buatan Kaya no Miko seperti yang diceritakan dalam koleksi cerita abad ke-12, Konjaku Monogatari Shu, hingga boneka robot karakuri-ningyo yang dikembangkan dengan tingkat teknologi yang cukup tinggi dan ditampilkan dalam bentuk boneka sebagai hiburan di teater dan dalam festival (hingga sekarang tetap ditampilkan dalam Festival Takayama di Prefektur Gifu). Pada tahun 1927 muncul robot Jepang yang pertama yang dikembangkan dengan mempergunakan teknologi barat, diberi nama Gakutensoku. Robot ini bisa tersenyum, mengedip-ngedipkan mata dan bahkan bisa menulis. Dengan adanya pengembangan robot ini, robot kini bisa menjadi teman, mempunyai kecerdasan, dan perasaan manusia, seperti dalam cerita kartun Astro Boy.
Keunggulan dalam teknologi robot tak dapat dipungkiri, telah lama dijadikan ikon kebanggaan negara-negara maju di dunia. Kecanggihan teknologi yang dimiliki, gedung-gedung tinggi yang mencakar langit, tingkat kesejahteraan rakyatnya yang tinggi, kota-kotanya yang modern, belumlah terasa lengkap tanpa popularitas kepiawaian dalam dunia robot. Pada awalnya, aplikasi robot hampir tak dapat dipisahkan dengan industri sehingga muncul istilah industrial robot dan robot manipulator. Definisi yang populer ketika itu, robot industri adalah suatu robot tangan (arm robot) yang diciptakan untuk berbagai keperluan dalam meningkatkan produksi, memiliki bentuk lengan-lengan kaku yang terhubung secara seri dan memiliki sendi yang dapat bergerak berputar (rotasi) atau memanjang/memendek (translasi atau prismatik). Satu sisi lengan yang disebut sebagai pangkal ditanam pada bidang atau meja yang statis (tidak bergerak), sedangkan sisi yang lain yang disebut sebagai ujung (end effector) dapat dimuati dengan tool tertentu sesuai denga tugas robot. Dalam dunia mekanikal, manipulator ini memiliki dua bagian, yaitu tangan atau lengan (arm) dan pergelangan (wrist). Pada pergelangan ini dapat diinstall berbagai tool. Begitu diminatinya penggunaan manipulator dalam industry, menyebabkan banyak perusahaan besar di dunia menjadikan robot industri sebagai unggulan. Bahkan beberapa perusahaan di Jepang masih menjadikan manipulator sebagai produk utamanya, seperti Fanuc Inc. yang memiliki pabrik utamanya di lereng gunung Fuji.Dewasa ini mungkin definisi robot industri itu sudah tidak sesuai lagi karena teknologi mobile robot juga sudah dipakai meluas sejak awal tahun 1980-an. Seiring itu pula kemudian muncul istilah humanoid robot (konstruksi mirip manusia), animaloid (mirip binatang), dan sebagainya. Bahkan kini dalam industri spesifik seperti industri perfilman, industri angkasa luar dan industri pertahanan atau mesin perang, arm robot atau manipulator bisa jadi hanya menjadi bagian saja sistem robot secara keseluruhan.
Konsep Dasar Raspberry Pi
Menurut Wiley, John dan Ltd, Sons (2014)[22], “The Raspberry Pi is a credit sized computer that plug into your TV and a keyboard. It is a capable little computer which can be used in electronics projects, and for many things that your desktop PC does, like spreadsheets,word-processing and games. It also plays high definiton video.”.
The Model B+ is the final revision of the original Raspberry Pi. It replaced the Model B in July 2014 and was superseded by the Raspberry Pi 2 Model B in February 2015
Model B + adalah revisi akhir asli Raspberry Pi. Ia menggantikan Model B pada bulan Juli 2014 dan digantikan oleh Raspberry Pi Model 2B di Februari 2015
Dari pengertian tersebut bisa di liat bahwa Raspberry Pi B+ adalah generasi kedua dari Raspberry itu sendiri yang telah di Perbaharui di berbagai sector antara lain adalah :
Tabel 2.4. Perbedaan Spesifikasi Raspberry Pi B+
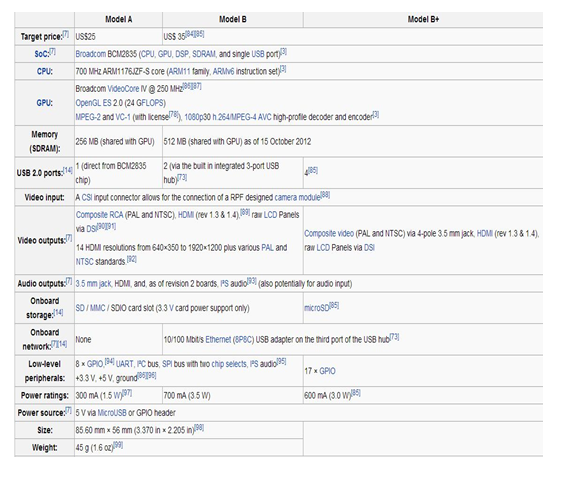
Sumber: John wiley & Sons Ltd (2014)
- GPIO pada Model B+ kini menjadi 40 pin
- 4 Port USB 2.0.
- Soket SD Card yang diperbarui.
- Konsumsi daya yang lebih hemat, sekitar 0.5 – 1 Watt lebih hemat.
- Chip Audio yang diperbarui dengan anti-noise.
- Penggeseran tata letak beberapa port.
Richardson dan Wallace [23] menjelaskan beberapa cara untuk menjelaskan beberapa cara yang dapat dilakukan oleh Raspberry Pi diantaranya sebagai berikut (2013:8) :
a. General Purpose Computing
Perlu diingat bahwa Raspberry Pi adalah sebuah komputer dan memang pada faktanya dapat digunakan sebagai sebuah komputer. Setelah perangkat ini siap untuk digunakan kita bisa memilih untuk boot langsung ke dalam GUI (Graphical User Interface) dan didalamnyaterdapat sebuah web browser yang merupakan aplikasi yang banyak digunakan komputer sekarang ini. Perangkat inijuga dapat di install banyak aplikasi gratis seperti LibreOffice yang digunakan untuk pekerjaan-pekerjaan kantor.
b. Learning to Program
Raspberry Pi pada dasarnya ditujukan sebagai alat edukasi untuk mendorong anak-anak bereksperimen dengan komputer. Perangkat ini sudah terpasang dengan interpreters dan compilers untuk berbagai bahasa pemrograman. Untuk pemula telah disediakan Scratch, sebuah bahasa pemrograman berasaskan grafik dari MIT. Kita bisa menulis program untuk Raspberry Pi dalam berbagai bahasa seperti C, Ruby, Java, Python, dan Perl.
c. Project Platform
Raspberry Pi membedakan dirinya dari komputer pada umumnya bukan dari segi harga dan ukurannya saja, tapi juga karena kemampuannya berintegrasi dengan proyek-proyek elektronik.
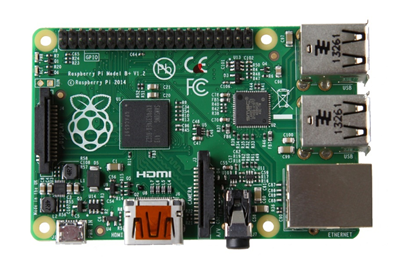
Gambar 2.14. Model Raspberry Pi B+
Raspberry Pi B+ adalah sebuah Personal Computer (PC) yang berukuran sebesar kartu ATM. Raspberry Pi B+ memiliki system on a chip (SoC) bernama BCM2835, memiliki Processor ARM1176JZ 700MHz dan RAM 512 MB. Beberapa Port dan Slot pada Raspberry Pi B+ :
1. Micro (SD) Card Slot
Slot ini digunakan untuk penyimpanan OS yang telah diinstal pada micro SD.
2. Universal Serial Bus (USB) Port
Pada Raspberry Pi B+ terdapat 4 Port USB 2.0 biasanya dipakai untuk Mouse dan Keyboard.
3. Ethernet Port
Terdapat port RJ45 standar yang dapat terhubung pada jaringan.
4. High Definition Multimedia Interface (HDMI) Konektor
Berfungsi Untuk menampilkan gambar digital dari Raspberry kelayar Monitor.
5. Output Audio / RCA Mini
Terdapat jack standar 3.5mm yang berfungsi untuk menghasilkan suara.
6. Power Input
Terdapat microUSB konektor yang berfungsi untuk supply listrik pada Raspberry PI B+.
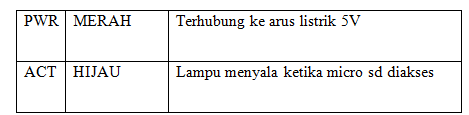
7. Status LEDs
Tabel 2.5. Status LED
2. Instalasi Raspberry Pi
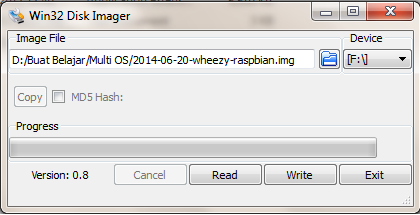
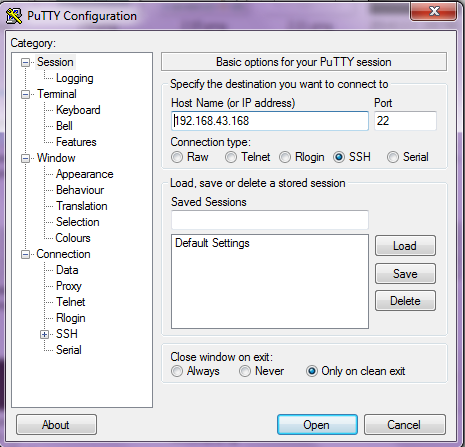
Raspbian adalah sistem operasi berbasis Debian (Linux) yang dapat digunakan pada Raspberry Pi. Raspbian tersebut merupakan seperangkat program dasar dan utilitas yang membuat Raspberry Pi berjalan. Dibutuhkan software Win32 Disk Imager untuk menginstal Raspbian yang berektensi .img. Win 32 Disk Imager merupakan sebuah aplikasi free yang memiliki antar muka, dan berfungsi sebagai writing image pada SD Card.Langkah – langkah dalam instalasi Raspbian adalah sebagi berikut :
- Menginstal Raspbian menggunakan Win32 Disk Imager
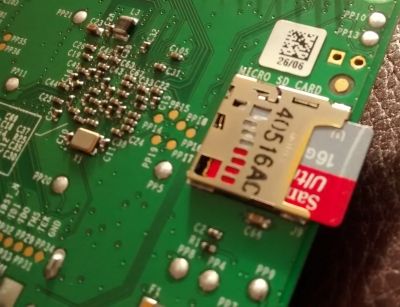
- Masukan SD Card kedalam Raspberry Pi
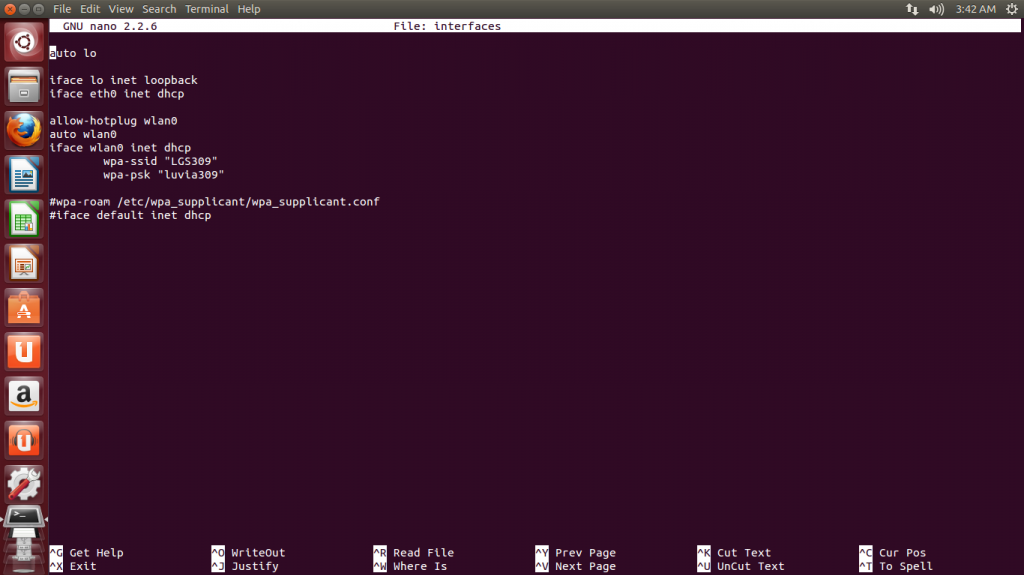
- Setting Wifi Raspberry Pi menggunakan Ubuntu di PC/Laptop
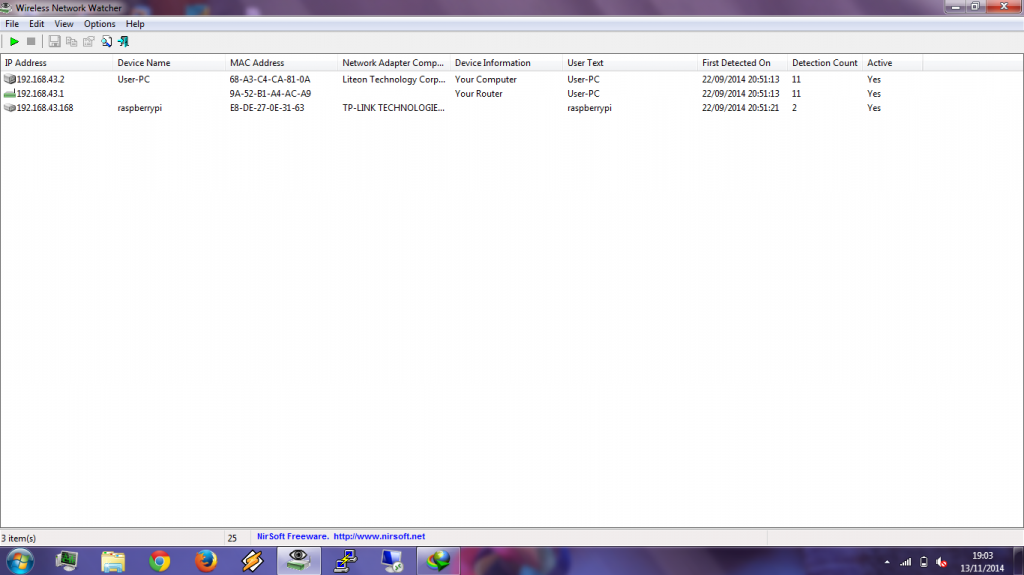
- Cari IP Address Raspberry Pi menggunakan Wireless Network Watcher
- Klik Putty (SSH, Telnet Rlogin Client), Kemudian login dengan IP Address Raspberry Pi
- Kemudian klik finist dan klik starx
Konsep Dasar Sistem Operasi Raspbian
Gambar 2.21. Logo Raspbian
2. Debian GNU/Linux
Debian GNU/Linux adalah distro non komersial yang dihasilkan oleh para sukarelawan dari seluruh dunia yang saling bekerjasama melalui internet. Distro ini menginginkan adanya semangat open-source yang harus tetap ada pada Debian. Kedinamisan distro ini membuat setiap rilis paket-paketnya di-update setiap waktu dan dapat di akses melalui utilitas apt-get. Apt-get adalah sebuah utilitas baris-perintah yang dapat digunakan secara dinamis untuk meng-upgrade sistem Debian GNU/Linux melalui apt-repository jaringan archive Debian yang luas. Milis dan forum debian selalu penuh dengan pesan-pesan baik mengenai bug, masalah, sharing, dan lain-lain. Dengan adanya sistem komunikasi ini bug dan masalah keamanan pada tiap paket dapat dilaporkan oleh para pengguna dan pengembang Debian dengan cepat. Keuntungan dari Debian adalah upgradability, ketergantungan antar paket didefinisikan dengan baik, dan pengembangannya secara terbuka.

Gambar 2.22. Logo Debian
Konsep Dasar Linux
Konsep dasar Phyton
1. Konsep Dasar Pyton
Pada awalnya, motivasi pembuatan bahasa pemrograman ini adalah untuk bahasa skrip tingkat tinggi pada sistem operasi terdistribusi Amoeba. Bahasa pemrograman ini menjadi umum digunakan untuk kalangan engineer seluruh dunia dalam pembuatan perangkat lunaknya, bahkan beberpa perusahaan menggunakan python sebagai pembuat perangkat lunak komersial. Python merupakan bahasa pemrograman yang freeware atau perangkat bebas dalam arti sebenarnya, tidak ada batasan dalam penyalinannya atau mendistribusikannya. Lengkap dengan source codenya, debugger dan profiler, antarmuka yang terkandung di dalamnya untuk pelayanan antarmuka, fungsi sistem, GUI (antarmuka pengguna grafis), dan basis datanya.
2. Sejarah Phyton
Python[26] dikembangkan oleh Guido van Rossum pada tahun 1990 di CWI, Amsterdam sebagai kelanjutan dari bahasa pemrograman ABC. Versi terakhir yang dikeluarkan CWI adalah 1.2. Tahun 1995, Guido pindah ke CNRI sambil terus melanjutkan pengembangan Python. Versi terakhir yang dikeluarkan adalah 1.6. Tahun 2000, Guido dan para pengembang inti Python pindah ke BeOpen.com yang merupakan sebuah perusahaan komersial dan membentuk BeOpen PythonLabs. Python 2.0 dikeluarkan oleh BeOpen. Setelah mengeluarkan Python 2.0, Guido dan beberapa anggota tim PythonLabs pindah ke DigitalCreations. Saat ini pengembangan Python terus dilakukan oleh sekumpulan pemrogram yang dikoordinir Guido dan Python Software Foundation. Python Software Foundation adalah sebuah organisasi non-profit yang dibentuk sebagai pemegang hak cipta intelektual Python sejak versi 2.1 dan dengan demikian mencegah Python dimiliki oleh perusahaan komersial. Saat ini distribusi Python sudah mencapai versi 2.6.1 dan versi 3.0. Nama Python dipilih oleh Guido sebagai nama bahasa ciptaannya karena kecintaan guido pada acara televisi Monty Python s Flying Circus. Oleh karena itu seringkali ungkapan-ungkapan khas dari acara tersebut seringkali muncul dalam korespondensi antar pengguna Python. Aplikasi bahasa phyton Perangkat bantu shell. Tugas-tugas sistem administrator, program baris perintah. Kerja bahasa ekstensi dan antarmuka untuk pustaka C/C++.
Komponen Dasar Elektronika
1. Definisi Elektronika
Menurut Ernawati Waridah (2014:152) [27] “Elektronika adalah cabang ilmu fisika yang mempelajari pemancaran,prilaku,dampak elektron, serta alat-alat yang menggunakannya”.
Menurut Abdul kadir (2013:2), [28] “Rangkaian elektronik adalah rangkaian listrik yang mengandung komponen-komponen elektronik”.
Dan definisi elektronika secara umum adalah ilmu yang mempelajari tentang listrik arus lemah yang dioperasikan dengan cara mengontrol aliran elektron atau partikel bermuatan listrik dalam suatu alat. alat-alat yang menggunakan dasar kerja elektronika ini disebut sebagai peralatan elektronik (electronic devices).
Contoh peralatan (piranti) elektronik : Radio, TV, kamera video, kamera digital, computer, Laptop , smart card, dll.
Menurut S.Suyambazhahan (2012:274) Komponen elektronika dibagi menjadi 2 kelompok yaitu:
a. Komponen Pasif
Komponen pasif adalah komponen-komponen elektronika yang apabila dialiri aliran listrik tidak menghasilkan tenaga seperti: perubahan tegangan, pembalikan fasa, penguatan dan lain-lain
Ada beberapa komponen yang termasuk dalam komponen pasif di antaranya adalah:
1. Resistor atau Tahanan
2. Kapasitor atau Kondensator
3. Trafo atau Transformator
b. Komponen aktif
Komponen aktif adalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatu tenaga baik berbentuk penguatan maupun mengatur aliran listrik yang melaluinya
Ada beberapa yang termasuk komponen aktif antara lain adalah:
1. Dioda
2. Transistor
3. IC (Intragated Circuit)
4. Thyristor atau SCR (Silicon Controller Recifier)
a. Resistor
Menurut Winarno (2011:39),[29], “Resistor adalah salah satu komponen elektronik yang membatasi arus yang mengalir dalam rangkaian tertutup”.
Menurut Sandy Hermawan (2014:262), [30], “Resistor adalah satu elemen elektronika yang di gunakan sebagai hambatan listrik”.
Dari pengertian diatas dapat disimpulkan bahwa resistor adalah komponen elektronika yang berfungsi memberikan tahanan atau hambatan arus listrik.
Resistor digunakan sebagai bagian dari jejaring elektronik dan sirkuit elektronik, dan merupakan salah satu komponen yang paling sering digunakan.Resistor dapat dibuat dari bermacam-macam kompon dan film, bahkan kawat resistansi (kawat yang dibuat dari paduan resistivitas tinggi sepertinikel-kromium).

Gambar 2.23. Resistor
Karakteristik utama dari resisitor adalah resisitansinya dan daya listrik yang dapat dihantarkan. Karakteristik lain termasuk koefisien suhu, listrik dan induktansi.
b. Kapasitor
Menurut Winarno (2012:39), [29], bahwa “Kapasitor adalah komponen yang berguna untuk menyimpan muatan listrik ukuran muatan listrik”.
Menurut Abdul Kadir (2012:3)[28], bahwa “Kapasitor adalah komponen yang berguna untuk menyimpan muatan listrik ukuran muatan listrik.
Berdasarkan definisi diatas dapat disimpulkan bahwa kapasitor adalah komponen listrik yang berfungsi sebagai penyimpanan listrik sementara. Kapasitor sendiiri berasal dari kata capacitance atau kapasitas yang artinya adalah kemampuan untuk menyimpan arus listrik (Dalam istilah elektronika diistilahkan sebagai “Muatan Listrik.”)Jadi kapasitor adalah suatu komonen yang dapat diisi dengan muatan listrik kemudian disimpan untuk sementara waktu dan selanjutnya muatan tersebut di kosongakan/dibuang melalui suatu sistem atau dihubungkan ke bumi.

(Sumber: Winarno(2011:39)
Gambar 2.24 Lambang Kapasitor
c. Transistor
Menurut Abdul Kadir (2012:3)[28], Transistor merupakan komponen dengan fungsi bermacam-macam. Komponen ini dapat berfungsi seperti layaknya keran air.
Alat semikonduktor yang dipakai sebagai penguat, sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan, modulasi sinyal atau sebagai fungsi lainnya.Transistor dapat berfungsi semacam kran listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Gambar 2.25 Transistor
Pada umumnya, transistor memiliki 3 terminal, yaitu Basis (B), Emitor (E) dan Kolektor (C). Tegangan yang di satu terminalnya misalnya Emitor dapat dipakai untuk mengatur arus dan tegangan yang lebih besar daripada arus input Basis, yaitu pada keluaran tegangan dan arus output Kolektor.
Konsep Dasar Motor
1. Definisi Motor DC (Direct Current)
Menurut winarno dan Arifianto (2011:60),[29], “Motor DC adalah jenis motor elektrik yang bekerja pada arus searah. motor jenis ini sering digunakan pada robot bergerak, karena tipe motor dapat disesuaikan dengan kebutuhan robot”.
Menurut Beni Anggoro (2010:18),[21], “Motor DC adalah motor yang bergerak menggunakan arus DC atau searah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energy gerak”.
Berdasarkan definisi diatas dapat disimpulkan bahwa motor dc adalah jenis motor yang digunakan dalam sebuah robot sebagai penggerak yang memerlukan tegangan listrik untuk dapat bergerak. Dalam sebuah robot motor dc dapat ditambahan gear jenis tertentu, motor ini dapat menghasilkan kecepatan tinggi atau torsi yang kuat. power supply yang digunakan berkisar antara 3-24 volt dengan arus sebesar 1 ampere.

Gambar 2.26. Motor DC Gearbox
Jenis-jenis motor DC antara lain:
a. Brushed
Membentuk torka langsung dari listrik DC yang terhubung ke motor dengan menggunakan internal commutation, magnet permanen stasioner, dan magnet elektris berputar. Bekerja dengan prinsip Lorentz, yaitu jika konduktor penghantar arus ditempatkan di medan magnet eksternal akan mengalami torka atau gaya yang dikenal sebagai gaya Lorentz.
b. Synchronous
Memerlukan commutation eksternal untuk menciptakan torka. Kontruksi synchronous motor.
c. Brushless
Menggunakan magnet permanen berputar dalam rotor, dan magnet elektris stasioner pada housing motor. Desain ini lebih simple dari pada motor brushed karena mengeliminasi komplikasi dari pemindahan power dari luar motor ke rotor yang berputar.
d. Uncommutated
Motor DC tipe lain yang tidak membutuhkan commutation.
2. Definisi Motor Servo
Menurut Winarno dan Arifianto (2011:60)[29], “Motor servo merupakan sebuah motor DC yang memiliki rangkaian kontrol elektronik dan internal gear untuk mengendalikan pergerakan dan sudut angularnya. Motor servo memiliki rate putaran yang lambat tetapi memiliki torsi yang kuat”.
Motor servo mampu berputar pada sudut tertentu, dan sudut pergerakan rotornya dikendalikan hanya dengan mengatur duty cycle sinyal PMW (Pulse Width Modulation) pada bagian pin kontrolnya.
Motor servo terdiri dari 2 jenis berikut:
1. Motor servo standar 180o.
Merupakan motor servo yang hanya dapat berputar sebesar 180o dengan defleksi masing-masing 90o.
2. Motor servo kontinyu.
Merupakan motor servo yang tidak memiliki batasan defleksi sudut putar, sehingga dapat berputar 360o.

Gambar 2.27. Bentuk Fisik Motor Servo
Kabel kontrol digunakan untuk mengatur sudut posisi dari batang output. Sudut posisi ditentukan oleh durasi pulsa yang diberikan oleh kabel kontrol. Servomotor digerakkan dengan menggunakan Pulse Width Modulation (PWM). Servomotor akan mengecek pulsa setiap 20 milisecond (0,2 detik). Panjang pulsa akan menentukan seberapa jauh motor akan berputar. Contohnya, pada pulsa 1,5 milisecond akan membuat motor berputar sejauh 90° (lebih sering disebut posisi netral). Jika pulsa lebih pendek dari 1,5 milisecond, maka motor akan berputar lebih dekat ke 0°. Jika lebih 26 panjang dari 1,5ms, maka akan berputar mendekati 180°. Dari Gambar 2.27 , durasi pulsa menentukan sudut dari batang output.
3. Definisi Motor Driver IC L298
Menurut Arifianto (2011:54)[29] motor driver adalah rangkaian elektronik yang berfungsi untuk memperkuat arus dan tegangan yang dibutuhkan oleh motor. jika suplai arus dan tegangan kecil, motor tidak akan berputar secara maksimal”.
Motor driver IC L298 memiliki fungsi yaitu sebagai pengendali motor. Dalam IC ini juga terdapat dua buah pengendali yang dapat digunakan untuk mengendalikan dua buah motor. IC L298 mampu mengalirkan arus hingga 4A, sehingga ic L298 mampu menggerakkan motor yang lebih besar.
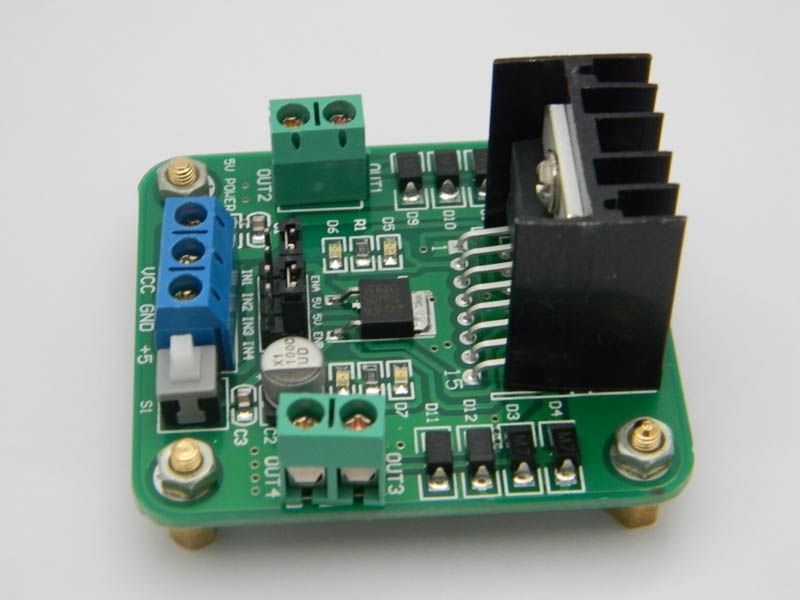
Gambar 2.28. Bentuk fisik IC L298
Konsep Dasar Rangka Chasis
1. Definisi Chasis
Menurut Arifianto (2011:54) [29], “Rangka atau bisa disebt chasis adalah badan utama robot yang menjadi tempat meletakan semua komponen atau rangkaian pendukung robot”.
Menurut Fadila (2010:1), “Chasis adalah rangka yang berfungsi sebagai penopang berat kendaraan, mesin serta penumpang”.

Gambar 2.29. Bentuk Rangka Chasis
Berdasarkan definisi diatas rangka chasis adalah komponen utama pemompang berat komponen pendukung robot. Bentuk dan dimensi robot sangat beragam, menyesuaikan dengan jenis dan jumlah rangkaian pada robot yang ingin dibuat. rangka robot dapat dibuat dengan menggunakan bahan yang ringan dan kuat. bahan-bahan yang biasa digunakan untuk menggunakan robot antara lain, Acrylic
Acrylic adalah plastik transparan yang menyerupai kaca. acrylic bersifat keras, ringan, dan mudah dibentuk dengan cara pemanasan. Acrylic termasuk bahan rangka yang mahal dan sulit ditemukan di pasaran. selain sebagai bahan dasar rangka, acrylic juga memperindah tampilan robot.
2. Jenis-Jenis Chasis
Menurut Arifianto (2011:54) [29] Chasis memiliki beberapa jenis, diantaranya:
1. Ladder Frame
Ladder Frame adalah dua batangan panjang yang menyokong kendaraan dan menyediakan dukungan yang kuat dari berat beban dan umumnya berdasarkan desain angkut. Bentuk bodi ini merupakan salah satu contoh yangbagus dari tipechassis. Dinamakan demikian karena kemiripannya dengan tangga, Ladder Frameadalah yang paling sederhana dan tertua dari semua desain. Ini terdiri hanya dari dua rel simetris, atau balok, dan crossmembers menghubungkan mereka. Dua batang memanjang tersebut merupakan bagian yang utama untuk menahan beban longitudinal akibat percepatan.
2. Tubular Space Frame
Berdasarkan salah satu jenis metode chassis terbaik yang kekuatan luluh nya sangat bagus di perlindungan kekakuan torsional,ketahanan beban berat,dan beban impak, frame ini juga mudah untuk di desain dan cukup lumayan sulit dalam membangunnya.
3. Monocoque
Monocoque merupakan satu kesatuan stuktur chassis dari bentuk kendaraannya sehingga chassis ini memiliki bentuk yang beragam.
4. Chasis Backbone
Chassis backbone ini hampir seluruhnya adalah struktur kaku dan dapat menahan semua beban. Ini terdapat beberapa lubang yang kontinu. Karena begitusempit diindingnya umumnya dibuat tebal. Chassis Backbone memiliki kekakuan dari luas area bagian backbone itu sendiri
Konsep Dasar Kamera Webcam
Menurut Materi Ajar Pengantar Multimedia oleh Wahyu Hidayat (2010)[31] Kamera Web yaitu suatu piranti dalam perlengkapan lensa yang secara optik mekanik atau elektronik merekam gerakan sebuah obyek sebagai tujuan, kamera berasal dari bahasa latin yang artinya lompatan.
Webcam (singkatan dari Web Camera) adalah salah satu bagian perangkat multimedia yang terdiri dalam kamera digital yang didukung guna untuk melakukan manajemen sebuah gambar serta suara sehingga mampu melaksanakan proses video view, video capture dan video save. Webcam yaitu sebutan di kamera real-time (keadaan pada saat ini juga) yang gambarnya dapat diakses atau disaksikan lewat World Wide Web, program instant messaging atau aplikasi video call. Istilah webcam juga merujuk kepada jenis kamera yang digunakan untuk keperluan ini. Ada berbagai macam merek dari webcam salah satunya LogiTech. Webcam pada umumnya, memiliki resolusi 352x288 piksel atau 640x480 piksel.

Sumber: WEBCAM TYPE C170
Gambar 2.30. Kamera Webcam Logitech
Konsep Dasar Power Supply
1. Definisi Power Supply
Menurut Gunawan (2011:1)[32], power supply adalah alat atau sistem yang berfungsi untuk menyalurkan energi listrik atau bentuk energi jenis apapun yang sering digunakan untuk menyalurkan energi listrik. Secara prinsip rangkaian power supply adalah menurunkan tegangan AC, menyearahkan tegangan AC sehingga menjadi DC, menstabilkan tegangan DC, yang terdiri atas transformator, dioda dan kapasitor atau kondensator. Tranformator biasanya berbentuk kotak dan terdapat lilitan-lilitan kawat email didalamnya. Ada 2 jenis rangkaian penyearah, yaitu setengah gelombang (half wave) dan gelombang penuh (fullwave). Arus listrik DC yang keluar dari dioda masih berupa deretan pulsa-pulsa. Tentu saja arus listrik DC semacam ini tidak cocok atau tidak dapat digunakan oleh perangkat elektronik apapun. Kapasitor berfungsi sebagai filter pada sebuah rangkaian power supply.
2. Fungsi Power Supply
Menurut Gunawan (2011:1)[32], power supply dapat melakukan fungsi berikut ini:
- Rectification: konversi input listrik AC menjadi DC.
- Voltage Transformation: memberikan keluaran tegangan atau voltage DC yang sesuai dengan yang dibutuhkan.
- Filtering: menghasilkan arus listrik DC yang lebih bersih, bebas dari ripple ataupun noise listrik yang lain
- Regulation: mengendalikan tegangan keluaran agar tetap terjaga, tergantung pada tingkatan yang diinginkan, beban daya, dan perubahan kenaikan temperatur kerja juga toleransi perubahan tegangan daya input.
- Isolation: memisahkan secara elektrik output yang dihasilkan dari sumber input.
- Protection: mencegah lonjakan tegangan listrik (jika terjadi), sehingga tidak terjadi pada output, biasanya dengan tersedianya sekering untuk auto shutdown jika hal terjadi.
Idealnya, sebuah power supply dapat menghasilkan output yang bersih, dengan tegangan output yang konstan terjaga dengan tingkat toleransi dari tegangan input, beban daya, juga suhu kerja, dengan tingkat konversi efisiensi 100%.
Protokol TCP/IP
• Protokol TCP/IP dikembangkan menggunakan standar protokol yang terbuka.
• Standar protokol TCP/IP dalam bentuk Request For Comment (RFC) dapat diambil oleh siapa pun tanpa biaya.
• TCP/IP dikembangkan dengan tidak tergantung pada sistem operasi atau perangkat keras tertentu.
• TCP/IP independen terhadap perangkat keras jaringan dan dapat dijalankan pata ethernet,token ring, jalur telepon dial-up, jaringan X.25, dan praktis jenis media transmisi apapun.
• Pengalamatan TCP/IP bersifat unik dalam skala global. Dengan cara ini, komputer dapat saling terhubung walau jaringannya seluas internet sekarang ini
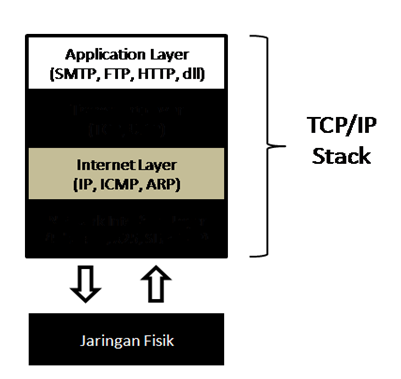
2.31. Layer TCP/IP
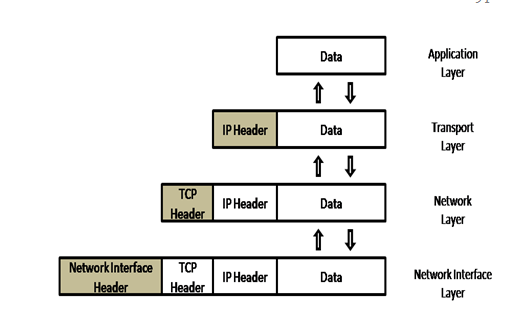
2.32. Pergerakan dalam Layer TCP/IP
Adapun rincian fungsi masing-masing layer arsitektur TCP/IP adalah sebagai berikut :
- Physical Layer (lapisan fisik)
Merupakan lapisan terbawah yang mengidentifdikasikan besaran fisik seperti media komunikasi, tegangan, arus, dsb. Lapisan ini dpat bervariasi bergantung pada media komunikasi jaringan yang bersangkutan. - Network Access Layer
Mempunyai fungsi yang mirip dengan Data Link Layer pada OSI. Lapisan ini mengatur penyaluran frame-frame data pada media fisik yang digunakan secara handal. Lapisan ini biasanya memberikan servis untuk deteksi dan koreksi kesalahan dari data yang transmisikan. - Internet Layer
Mendefinisikan bagaimana hubungan dapat terjadi antara dua pihak yang berbeda pada jaringan yang berbeda seperti Network Layer pada OSI. Pada jaringan internet yang terdiri atas puluhan juta host dan ratusan ribu jaringan lokal, lapisan ini bertugas untuk menjamin agar suatu paket yang dikirimkan dapat menemukan tujuannya dimanapun berada.oleh karena itu, lapisan ini memiliki peranan penting terutama dalam mewujudkan internet working yang meliputi wilayah luas (word wide internet) - Transport Layer
Mendefinisikan cara-cara untuk melakukan pengiriman data antara end to end secara handal. Lapisan ini menjamin bahwa informasi yang diterima pada sisi penerima adalah sama dengan informasi yang dikirimkan pengirim. Untuk itu, lapisan ini memiliki fungsi penting seperti Flow Control dan Eror Detection. - Application Layer
Merupakan lapisan terakhir dalam arsitektur TCP/IP yang berfungsi mendefinisikan aplikasi-aplikasi yang dijalankan pada jaringan. Karena itu, terdapat banyak protokol pada lapisan ini, sesuai dengan banyaknya lapisan TCP/IP yang dapat dijalankan. Contohnya adalah SMTP (Simple Mail Transfer Protocol) untuk pengiriman email, FTP (File Transfer Protocol) untuk transfer data, HTTP (Hyper Text Transfer Protocol) untuk aplikasi web, NNTP (Network News Transfer Protocol) untuk distribusi news group dan lain-lain. Setiap aplikasi pada umumnya menggunakan protokol TCP dan IP, sehingga keseluruhan keluarga protokol ini dinamai TCP/IP.
Internet Protokol
a. Adanya bit error pada saat pentrasmisian datagram pada suatu medium.
b. Router yang dilewati men-discard datagram karena terjadinya kongesti dan kekurangan ruang pada memori buffer.
c. Putusnya rute ke tujuan untuk sementara waktu akibat adanya router yang down.
d. Terjadinya kekacauan routing, sehingga datagram mengalami looping.
Jaringan Komputer Nirkabel (Wireless)
Ada dua jenis jaringan wireless, diantaranya :
- Sebuah “ad-hoc” atau peer-to-peer wireless network yang mencakup sejumlah komputer dimana setiap komponennya dilengkapi dengan kartu antar muka jaringan nirkabel (w-NIC – wireless Network Interface Card).
- Sebuah jaringan wireless juga dapat menggunakan acces point, atau base station. Pada tipe jaringan wireless ini, access point bekerja seperti layaknya Hub yang menyediakan sambungan untuk komputer wireless. Juga dapat menyambungkan (sebagai bridge) dari jaringan lokal wireless ke jaringan kabel (Wireless LAN to Wired LAN).
untuk lebih melenhkapi, akan di jelaskan beberapa protokol pada wireless LAN sebagi berikut :
- 802.11b
Pertama kali digubakan sekitar akhir tahun 1999 dengan menggunakan frekunsi 2,4 GHz, maksimun bandwith yang dapat dicapai adalah 11 Mbps (Mega bit per second), radio sinyal yang digunakan adalah DSSS( Direct Sequence Spreed Spectrum ). Kanal yang tidak overlapping ada 3 (yaitu kanal 1, kanal 6, dan kanal 11). Kompitibel dengan tipe g jika dijalankan pada mode mixed. - 802.11a
Digunakan pada akhir tahun 2001 dengan menggunakan frekunsi 5,8 GHz. Maksimum bandwith yang bisa dicapai 54 Mbps, radio sinyal yang digunakan adalah OFDM. Kanal yang tidak overlapping 12 (bisa lebih) dan tidak kompitibel dengan tipe b dan g. - 802.11g
Digunakan pada pertengahan tahun 2003 dengan menggunakan frekuensi 2,4 GHz, maksimum bandwith yang bisa dicapai pada awal pertama kali keluar sebesar 54 Mbps. Dengan berkembangnya teknologi, sekarang ini tipe g sudah bisa mencapai 108 Mbps. - 802.11 a/g
Digunakan mulai pertengahan tahun 2003 dengan menggunakan frekuensi 2,4 GHz dan 5,8 GHz, maksimum bandwith yang bisa dicapai adalah 5,4 GHz, modulasi sinyal yang digunakan OFDM. Tipe a/g ini diberi keleluasaan untuk menggunakan salah satu dari protokol; yang dapat digunakan pada jaringan Wi-Fi.
Konsep Dasar TP LINK TL-WN722N

Sumber: TP-LINK TL-WN722N
Gambar 2.33. TP-LINK TL-WN722N
Kelebihan :
Wireless USB Adapter TL-WN722N ini mempunyai akses koneksi internet berkecepatan tinggi.Alat ini mampu memberikan kecepatan nirkabel hingga 150Mbps. Alat ini memilikiantena eksternal yang dapat dilepas, dapat diputar sesuai arah yang diinginkan untuk mendapatkan sinyal yang paling kuat.
Kekurangan :
Untuk kekurangan alat ini, adalah dalam paket penjualan tidak tersedianya driver untuk sistem Operasi non Windows. Selain itu colokan USB-nya masih memakai tutup. Alangkah lebih baiknya jika menggunakan sistem "push-out" (tanpa tutup) seperti yang ada di flashdisk, sehingga tidak terjadi tutup yang hilang.
Konsep Dasar Web Browser
1. Definisi Web Browser
Menurut Sunarto (2010:23) [35], “Web Browser adalah sebuah program aplikasi yang dipergunakan untuk menjelajah dunia maya Internet”. web browser adalah suatu program atau software yang digunakan untuk menjelajahi internet atau untuk mencari informasi dari suatu web yang tersimpan didalam komputer. Awalnya, web browser berorientasi pada teks dan belum dapat menampilkan gambar. Namun, web browser sekarang tidak hanya menampilkan gambar dan teks saja, tetapi juga memutar file multimedia seperti video dan suara. Web browser juga dapat mengirim dan menerima email, mengelola HTML, sebagai input dan menjadikan halaman web sebagai hasil output yang informative.
Dengan menggunakan web browser, para pengguna internet dapat mengakses berbagai informasi yang terdapat di internet dengan mudah.
Fungsi Web Browser adalah Untuk menampilkan dan melakukan interaksi dengan dukumen-dokumen yang disediakan oleh web server
Berikut ini contoh-contoh Web Browser :
1. Mozila Firefox
Mozila Firefox aslinya bernama Phoenix dan kemudian untuk sesaat di kenal sebagai mozila Firebird aAdalah penjelajah web antar platform gratis yang di kembangkan oleh yayasan Mozila dan ratusan sukarelawan.sebelum dirilis versi 1.0 nya pada 9 november 2004. Firefox sudah mendapatkan sambutan yang sangat bagus dari pihak media, termasuk dari Forbes dan Wall Street Joumal.

Gambar 2.34 Logo Mozila Firefox
2. Google crome
Google Chrome merupakan browser buatan Google. Pada interfacenya terlihat bahwa google ingin para penggunanya lebih fokus pada web dan melupakan browser yang digunakan. Ini artinya google chrome memiliki tampilan yang tidak mengusik dan nyaman ketika sedang digunakan. Chrome juga memiliki modus penyamaran. Pada modus ini memungkinkan para penggunanya dapat mengakses website tanpa meninggalkan jejak. Fungsi yang lain masih merupakan keunggulan chrome adalah kemampuan menebalkan nama domain sebuah website yang dianggap berbahaya.

Gambar 2.35 Logo Google Chrome
3. Opera mini
Opera mungkin banyak juga yang sudah mengenal bagi para pencinta internet, Opera web browser yang memiliki 2 versi yaitu mobile dan dekstop.Opera adalah penjelajah web dan paket perangkat lunak Internet antar-platform. Opera terdiri dari kumpulan perangkat lunak untuk Internet seperti penjelajah web, serta perangkat lunak untuk membaca dan mengirim surat elektronik.

Gambar 2.36 Logo Opera Mini
4. Internet Explore
Internet Explorer merupakan sebuah browser keluaran Microsoft yang sangat terkenal dan banyak digunakan oleh orang-orang di seluruh dunia untuk menmgakses internet, karena software ini didukung oleh teknologi baru untuk membuat tampilan web lebih dinamis dan lebih hidup serta kompetibel. Internet Explorer terdapat kumpulan aplikasi yang saling terintegrasi dan terdapat berbagai macam fasilitas khusus untuk mendukung pemakaian internet, yaitu diantaranya adalah I Net, I News, Net Meeting serta Chomic Chat.

Gambar 2.37 Logo Internet Explore
4. Safari
Safari adalah aplikasi browser dari Apple Inc. Awalnya aplikasi ini hanya dapat digunakan pada Mac OS X saja. Namun pada pertengahan tahun 2007 Apple meluncurkan aplikasi browser Safari untuk sistem operasi Windows. Aplikasi Safari berbeda dengan aplikasi browser lainnya, karena menitik beratkan pada kemudahan dan kenyamanan penggunanya. Pada safari kita akan temui tampilan yang jauh berbeda, dimana elemen desain yang sangat canggih sehingga membuat browsing kita lebih menyenangkan. SnapBack. Fasilitas ini berfungsi untuk kembali ke titik awal aktivitas browsing setelah berkunjung ke banyak tempat (situs website). Progress Bar, dengan fasilitas ini kita bisa tahu seberapa cepat halaman website tampil di layar.Untuk keamanan,fasilitasnya masih standar.Untuk kecepatan akses, boleh dibilang Safari adalah jagoannya. Karena Safari memang dirancang sebagai browser yang ringan dan cepat.

Gambar 2.38 Logo Safari
Literature Review
Menurut Guritno, Sudaryono dan Untung Rahardja (2010:86)[17], “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama”. Beberapa Literature review tersebut adalah sebagai berikut:
1. Penelitian yang telah dilakukan oleh Abdul Rohman Rasyid [2012][36] dari UIN Sunan Gunung Djati Bandung sebagai bentuk Jurnal Penelitian Ilmiah dengan judul Robot Cinung Pemotong Rumput dan Penyapu Halaman Pada penelitian ini penulis bertujuan untuk melakukan terobosan baru dengan membuat sistem otomatisasi yang dapat meringankan pekerjaan manusia. Keunggulan dari robot cinung ini adalah dengan menggunakan limit switch,relay, motor DC dan mikrokontroller jenis AT89C51 dengan Flash Programmable produksi ATMEL. Prosesk erja dari sistem otomasi mutlak memerlukan sistem kontrol baik menggunakan mekanis, elektronik ataupun komputer. Untuk program instruksi atau perintah pada sistem kontrol mekanis maupun rangkaian elektronik tidak menggunakan bahasa pemrograman dalam arti sesungguhnya, karena sifatnya yang analog. Untuk sistem kontrol yang menggunakan komputer dan keluarganya (PLC maupun mikrokontroler) bahasa pemrograman merupakan hal yang wajib ada. Bahasa pemrograman seperti yang akan memberikan perintah pada manipulator dengan perantara driver sebagai penguat. Perintah seperti out, outport , out32 sebenarnya hanya memberikan perintah untuk sekian mill idetik berupa arus pada manipulator yang kemudian akan diperkuat.
2. Penelitian yang telah dilakukan oleh Fauzi Arizal [2014][37], dari Universitas Gunadarma sebagai bentuk Skripsi dengan judul Pengendali Robot Pemotong Rumput Melalui Android dengan Bluetooth berbasis Arduino. Pada penelitian ini peneliti bertujuan untuk mempermudah pekerjaan manusia dengan membuat robot pemotong rumput menggunakan gearbox motor DC yang ditempatkan pada posisi belakang robot . Sedangkan untuk antar muka dengan pengguna, penulis menggunakan software eclipse untuk membuat aplikasi pengendali robot. Komunikasi antara robot beroda dengan smartphone melalui media komunikasi Bluetooth, mengaplikasikan teknologi bluetooth pada robot beroda dengan memberikan instruksi seperti maju, dan mundur. Keunggulan dari robot ini ialah, pergerakan robot saat bergerak maju adalah 0,179 m/s sedangkan rata – rata pergerakan robot saat mundur adalah 0,169 m/s dan waktu rata – rata yang diperlukan robot untuk melakukan putaran sebesar 360 derajat adalah 8,86 detik.
3. Penelitian yang telah dilakukan oleh Riko Satria [2011][38], dari STIKOM Dinamika Bangsa Jambi sebagai bentuk Skripsi dengan judul Robot Pemotong Rumput Berbasis MikrokontrolerDT-Basic Nano System. Pada penelitian ini peneliti bertujuan memotong rumput diatas permukaan tanah yang rata, robot dapat dikendalikan dari jarak maksimum 100 meter, sebagai akuator robot ini menggunakan motor DC serta mikrokontroler menggunakan DT-Basic Nano System sebagai programnya
4. Penelitian yang telah dilakukan oleh Rafiuddin Syam [2013][39],dari Jurusan Mesin Fakultas Teknik Universitas Hasanuddin sebagai bentuk Jurnal Penelitian Ilmiah dengan judul Uji Eksperimen Untuk Trajectory Tracking Mesin Pemotong Rumput Tenaga Surya. Pada penelitian ini peneliti bertujuan untuk mengetahui eror tracking trojectory dan kecepatang potong pada mesin pemotong rumput dengan tenaga surya untuk sistem navigasi. Penggunaan tenaga surya dimaksudkan sebagai sumber tenaga untuk mengisi baterai, sistem kendali yang digunakan menjadikan operator sebagai bagian dari sensor close loop dengan sistem manual menggunakan gelombang radio pemancar.
5. Penelitian yang telah dilakukan oleh Muhamad Wahyudin [2014][40], dari STMIK Raharja sebagai bentuk Kuliah Kerja Praktek denganjudul Prototipe Robot Pemotong Rumput Taman Berbasis Raspberry Pi B+ Menggunakan Web Browser pada kantor Kepala Desa PasirGadung. Pada penelitian ini robot pemotong rumput taman dirancang dengan menggunakan raspberry b+ yang di program menggunakan bahasa pemograman python. Untuk menggerakan robot pemotong rumput raspberry pi b+ memberikan perintah kepada motor driver agar dapatmejalankan gear box roda. Robot pemotong rumput ini memiliki kekurangan pada pisau pemotong yang hanya dapat bergerak hanya pada 15 derajat. Prototipe tersebut merupakan pengembangan dari prototipe robot mata mata yang memiliki gerakan kekanan dan kekiri sabagai pengontrolan pemantauan taman.
Dari lima Literature Review yang ada, telah banyak penelitian mengenai tentang Robot Pemotong Rumput di samping itu juga ada pembahasan mengenai perancangan beberapa alat seperti Motor DC, Limit Switch, Relay,Mikrokontroller ATMega, DT-Basic Nano, dan Raspberry Pi B+. Maka dari itu penulis mengambil satu sample atau contoh untuk dijadikan acuan dari ke 5 (lima) literature review diatas yaitu penelitian terapan dengan judul Pengendali Robot Pemotong Rumput Melalui Android dengan Bluetooth berbasis Arduino yang menggunakan software eclipse untuk membuat aplikasi pengendali robot. Komunikasi antara robot beroda dengan smartphone melalui media komunikasi Bluetooth, yang mengaplikasikan teknologi bluetooth pada robot beroda dengan memberikan instruksi. Pada penelitian tersebut peneliti belum menggunakan motor servo metal gear sebagai penggerak pisau potong yang dapat bergerak 45 derajat lebih kuat, serta memanfaatkan layanan web browser pada semua perangkat elektroniksebagai interface .
BAB III
Tinjauan Organisasi
Gambaran Umum PT. Dian Surya Global

Gambar 3.1. PT Dian Surya Global
PT. Dian Surya Global adalah perusahaan OEM (Original Equipment Manufacturing), perusahaan yang bergerak dibidang Cooper Produsen (Perpaduan Kuningan dan Perunggu) seperti kopling, lantai saringan, floor drain, kotak hydrant, meter air tubuh, katup gerbang, katup bola dan y saringan. Sebagian besar produk nya memasok pasar USA.
Sejarah Singkat PT. Dian Surya Global
PT. Dian Surya Global merupakan perusahaan patungan antara: PT Multifortuna Asindo Indonesia sebanyak 78% dan Simmons Internasional (BVI) Ltd - Taiwan sebanyak 13% dan Shing San Yee (BVI) terbatas - Taiwan sebanyak 9% yang di dirikan pada tahun 1990. PT Multifortuna Asindo merupakan pemilik PT SURYA TOTO Indonesia (TOTO) , produsen saniter terkemuka di Indonesia.
PT. Dian Surya Global ialah perusahaan OEM (Original Equipment Manufacturing), perusahaan yang bergerak dibidang Cooper Produsen (Perpaduan Kuningan dan Perunggu) seperti kopling, lantai saringan, floor drain, kotak hydrant, meter air tubuh, katup gerbang, katup bola dan y saringan. Sebagian besar produk nya memasok pasar USA.OEM adalah perusahaan yang memproduksi produk tersebut.
Perusahaan ini memiliki pengalaman selama lebih dari 17 tahun dalam layanan OEM. PT DIAN SURYA GLOBAL memproduksi produk dengan spesifikasi pelanggan serta memodifikasi produk yang ada untuk memenuhi persyaratan tertentu. Selain itu, perusahaan ini menawarkan tim lengkap di-desain rumah untuk
melayani setiap kebutuhan masyarakat.Pelanggan PT DIAN SURYA GLOBAL OEM, meliputi:
• Indonesia
• USA
• Asia Tenggara
• Hongkong
• Australia dan Selandia Baru
Visi, Misi dan Tujuan PT. Dian Surya Global
Visi PT. Dian Surya Global
Visi PT. Dian Surya Global adalah Membuat hasil produksi PT DIAN SURYA GLOBAL yang dapat bersaing dipasaran nasional maupun internasional.
Misi PT. Dian Surya Global
- Kaderisasi dari tingkat operaator sampai dengan tingkat pempinan
- Peningkatan kemampuan tim individu maupun kemampuan team kerja
- Kebersamaan dan opini pemupukan rasa gotong royong dalam kesusahan secara horizontal maupun vertikal
- Menjunjung tinggi kejujuran (Laporan; Kerja; Materi) demi kesinambungan PT. Dian Surya Global
Tujuan PT. Dian Surya Global
Menghasilkan produk yang dapat bersaing dipasaran nasional maupun internasional, serta meningkatkan produktifitas kinerja karyawan dengan menjunjung tinggi kejujuran.
Struktur Organisasi
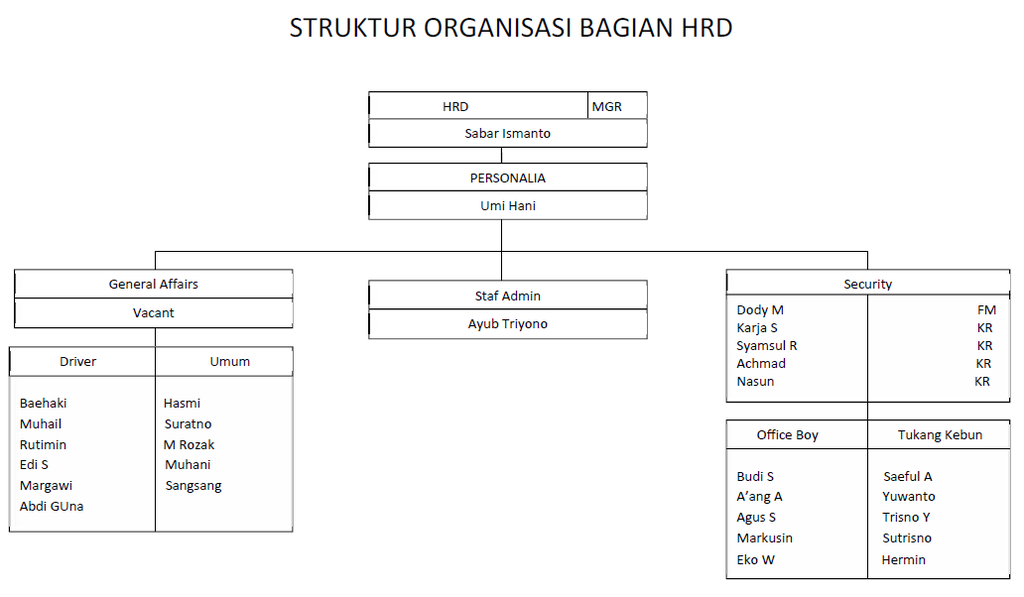
Tugas dan Tanggung Jawab Tiap Departemen
Dari gambar struktur organisasi diatas, penulis menjelaskan tentang tugas dan tanggung jawab dari struktur organisasi bagian HRD , dikarenakan sesuai dengan penelitian yang dilakukan. Berikut penjelasan tugas dan tanggung jawabnya :
- Menyusun, merencanakan, mengawasi dan mengevaluasi anggaran biaya kegiatan secara efektif dan efisien serta bertanggung jawab terhadap setiap pengeluaran hasil kegiatan
- Bertanggung jawab terhadap perencanaan, pengawasan dan melaksanakan evaluasi terhadap jumlah tenaga kerja yang dibutuhkan oleh perusahaan
- Melaksanakan seleksi, promosi, transfering, demosi terhadap karyawan yang dianggap perlu
- Melaksanakan kegiatan-kegiatan pembinaan, pelatihan dan kegiatan lainyang berhubungan dengan pengembangan mental, keterampilan dan pengetahuan karyawan sesuain dengan standard perusahaan
- Bertanggung jawab di dalam pengelolaan dan pengembangan Sumber DayaManusia, yaitu dalam hal perencanaan, pelaksanaan dan pengawasan kegiatan sumber daya manusia, termasuk pengembangan kualitasnya dengan berpedoman pada kebijaksanaan dan prosedur yang berlaku di perusahaan
- Bertanggung jawab terhadap hal-hal yang berkaitan dengan kegiatan-kegiatan pembinaan government industrial serta mempunyai kewajiban memelihara dan menjaga citra perusahaan
- Merencanakan dan mengembangkan kebijakan dan sistem pengelolaan SDM
- Mengkoordinasikan dan mengontrol pelaksanaan fungsi manajemen SDM di seluruh perusahaan agar dapat menunjang dan meningkatkan kinerja SDM dalam mencapai target perusahaan
- Menyusun strategi dan kebijakan pengelolaan SDM di perusahaan berdasarkan strategi jangka panjang dan jangka pendek yang telah ditetapkan sesuai dengan peraturan pemerintah yang berlaku agar diperoleh SDM dengan kinerja, kapabilitas dan kompetensi yang sesuai dengan yang diinginkan perusahaan
- Mengkoordinasikan dan mengontrol pelaksanaan fungsi SDM di seluruh perusahaan untuk memastikan semuanya sesuai dengan strategi, kebijakan,sistem dan rencana kerja yang telah disusun
- Mengarahkan, menganalisa dan mengelola praktek dan prosedur remunerasi untuk memastikan paket remunerasi yang ditetapkan perusahaan kompetitif,sejalan dengan praktek industri, sesuai kemampuan finansial perusahaan dana dil secara internal
- Membina hubungan dengan para vendor atau supplier barang dan jasa fasilitas/prasarana kantor serta membantu dalam menangani komplain atas vendor/supplier termasuk tindak lanjut atas penanganan nota pembayaran/invoice
- Melakukan survei tingkat kepuasaan atas pelayanan yang diberikan kepada seluruh karyawan/unit dalam perusahaan untuk tujuan peningkatan kualitas/mutu, ketepatan dan kecepatan pelayanan yang diberikan
- Membuat, menjalankan dan mengembangkan sistem kerja/prosedur atas pengadaan dan pemeliharaan fasilitas penunjang kerja
- Mendukung seluruh kegiatan operasional kantor dengan melakukan proses pengadaan seluruh peralatan kebutuhan kerja (seperti; ATK, komputer, meja/kursi kerja, AC, dst), maupun sarana atau fasilitas penunjang lain (seperti; kendaraan operasional, office boy, satpam, operator telpon, dst.) dengan cepat, akurat/berkualitas serta sesuai dengan anggaran yang ditentukan
- Menyiapkan laporan bulanan untuk keperluan rapat anggaran, laporan keuangan atas aset dan beban biaya kantor
- Melakukan aktivitas pemeliharaan atas seluruh fasilitas dan sarana penunjang, serta melakukan proses penggantian atas fasiltias/sarana penunjang yang rusak
- Menyusun laporan keuangan bulanan,triwulan, semester, dan tahunan perusahaan untuk memastikan laporan keuangan tersebut dibuat sesuai dengan prinsip-prinsip PSAK dan regulasi pemerintah yang berlaku serta dapat terlaporkan secara tepat waktu dan akurat
- Melakukan survei tingkat kepuasaan atas pelayanan yang diberikan kepada seluruh karyawan/unit dalam perusahaan untuk tujuan peningkatan kualitas/mutu, ketepatan dan kecepatan pelayanan yang diberikan
- Membuat, menjalankan dan mengembangkan sistem kerja/prosedur atas pengadaan dan pemeliharaan fasilitas penunjang kerja
- Menyusun laporan keuangan bulanan (P/L Statement, Stock, Price Spread) dengan data yang terdapat dari system sebagai bahan rapat bulanan manajer-manajer di Perusahaan
- Menyusun laporan keuangan bulanan (Balance Sheet, P/L Statement, CashFlow) melalui Accounting system berdasarkan informasi keuangan yg ada di sistem sebagai informasi/kontrol keuangan dari perusahaan induk
- Membuat laporan keuangan triwulanan untuk keperluan penyampaian informasi keuangan kepada manajemen dan pihak terkait lainnya.
- Menyusun laporan keuangan setengah tahunan (semester) untuk kepentingan pemeriksaan audit, bank, shareholder (internal & eksternal)
- Melakukan cek dan kontrol dari data-data pendukung transaksi akuntansi dari departemen-departemen terkait untuk memastikan transaksi keuangan disusun berdasarkan data/fakta yang ada
- Menyiapkan kelayakan kendaraan operasional yang akan di pergunakan
- Mempersiapkan kelayakan kendaraan operasional
- Membantu mengantar ataupun mengirim surat-surat yang berhubungandengan pekerjaan kerja
- Mengkoordinasikan kegiatan pengelolaan kepegawaian, pengembangan SDM serta pengelolaan rumah tangga kantor, pemeliharaan atau perbaikan peralatan sarana dan kebersihan dilingkungan Kantor Pusat.
- Mengkoordinasikan perumusan perencanaan dan pemberdayaan pegawai (man power planning), sesuai kebutuhan Perusahaan
- Mengkoordinasikan perumusan sistem pengadaan, penempatan dan pengembangan pegawai
- Mengkoordinasikan perumusan sistem dan kebijakan imbal jasa pegawai dengan mempertimbangkan internal atau external equity
- Melakukan koordinasi dengan Manager Operasional dan Divisi / bagian terkait dilingkungan Management pengelola dan pelaksanaan kegiatan tugas-tugas pengamanan
- Melakukan pengawasan terhadap pelaksanaan tugas-tugas pengamanan yang dilakukan anggotanya dan kegiatan pelaksanaan pengamanan secara umum
- Merencanakan dan menyusun kegiatan keamanan dan pengamanan secara berkala dalam rangka pengembangan sumber daya manusia, demi terciptanya suasana aman, nyaman, tentram dan dinamis di lingkungan
- Memastikan bahwa pengelolaan, penyelenggaraan dan pengorganisasian kegiatan operasional berjalan sesuai dengan peraturan
- Mempertanggung jawabkan tugasnya secara langsung kepada Area Manajer, serta secara tidak langsung kepada Operasional Manager
- Membantu melaksananakan tugas-tugas yang diberikan oleh staff-staff
- Bertanggung jawab atas kebersihan dan kerapihan kantor dan sekitarnya
- Bertanggung jawab kepada staff umum
- Mengusulkan keperluan alat perkebunan
- Merencanakan distribusi, jenis dan pemilah tanaman
- Memotong rumput
- Menyiangi rumput liar
- Memelihara dan memangkas tanaman
- Memupuk tanaman
- Memberantas hama dan penyakit tanaman
- Menjaga kebersihan dan keindahan taman serta kerindangan
- Merawat tanaman dan infrastrukturnya (pagar, saluran air)
- Merawan dan memperbaiki peralatan kebun
- Membuang sampah kebun dan lingkungan ketempat sampah
Tata Laksana Sistem Yang Berjalan
Prosedur Sistem Yang Berjalan
Prosedur pemotongan rumput taman yang berjalan saat ini terdiri dari 4 (empat) alur kerja, yakni sebagai berikut:
- Karyawan pada divisi elektrik mendatangi lapangan.
- Karyawan mencari peralatan pemeliharaan taman yang dibutuhkan.
- Karyawan mengambil peralatan mesin pemotong rumput dan gunting pemotong.
- Setelah selesai mengambil, karyawan tersebut menggunakan peralatan untuk pemeliharaan taman memotong rumput
Rancangan Prosedur Sistem Berjalan
1. Perancangan Prototipe
Dalam perancangan purwarupa robot pemotong rumput menggunakan raspberry pi pada PT. Dian Surya Global ini, disusun dengan menggunakan rangka chasis yang menopang komponen pendukung robot. Alat ini dilengkapi dengan komponen seperti: Raspberry Pi, DC Motor Driver L298N, Motor Servo Metal Gear, dan Motor DC Tamia. Bahan dalam perancangan prototipe ini terbuat dari chasiss dan acrylic.

Gambar 3.2 Perancangan Prototipe
2. Metode Prototipe
Metode prototipe ini penulis menggunakan metode prototipe evolutionary yang artinya adalah suatu pengembangan suatu sistem yang sudah ada, perbandingan antar sistem yang sudah ada dengan sistem yang di usulkan akan di jelaskan di bawah ini
Tabel 3.2 Tabel Perbandingan Prototipe
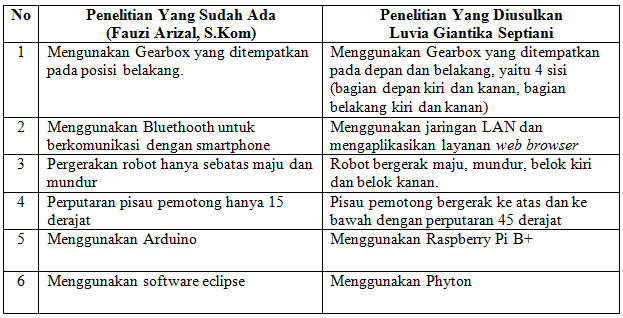
3. Flowchart Sistem Yang Berjalan
Berikut adalah flowchart sistem penyampaian informasi yang berjalan pada gambar 3.3.
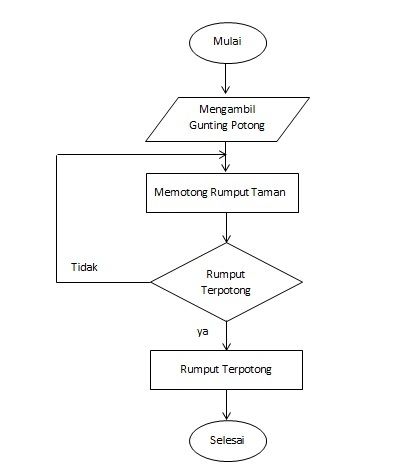
Gambar 3.3 Flowchart Sistem Penyampaian Informasi
Dapat dijelaskan gambar 3.3 Flowchart sistem yang berjalan pada PT. Dian Surya Global diatas yaitu terdiri dari:
- 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pemotongan rumput taman menggunakan raspberry pi yang berjalan.
- 1 (satu) simbol data, yang menyatakan situasi yang dilakukan oleh pegawai saat menggunakan peralatan pemotong rumput taman
- 2 (dua) simbol process, yang menyatakan sebuah proses memotong rumput dan menyatakan proses rumput terpotong
- 1 (satu) simbol decision, yang berperan untuk menunjukan sebuah langkah pengambilan keputusan jika “ya” dan “tidak”, yaitu: Apakah rumput pada taman di potong atau tidak. Jika ya perintah akan di proses tapi jika tidak akan memulai proses memotong rumput kembali.
4. Flowchart Sistem Yang Diusulkan
Pada rancangan sistem yang diusulkan ini adalah dengan adanya sebuah alat pemotong rumput taman menggunakan raspberry pi ini, diharapkan dapat memberikan kemudahan dalam kegunaannya. Karena, permasalahan yang sering dihadapi oleh karyawan bagain perawatan kebun adalah pada saat kegiatan perawatan taman atau kebun, sangatlah luas sehingga kegiatan pemotongan rumput pada taman tidak dapat digantikan kepada orang lain.
Hal ini membuat kegiatan pemotongan rumput pada taman tersebut dapat merepotkan karyawan saat kegiatan memotong rumput berlangsung dan juga berpengaruh pada keefektifan kerja sehingga kerjaan tidak cepat rampung. Berikut adalah flowchart sistem pemotongan rumput taman menggunakan raspberry pi yang diusulkan pada gambar 3.4.
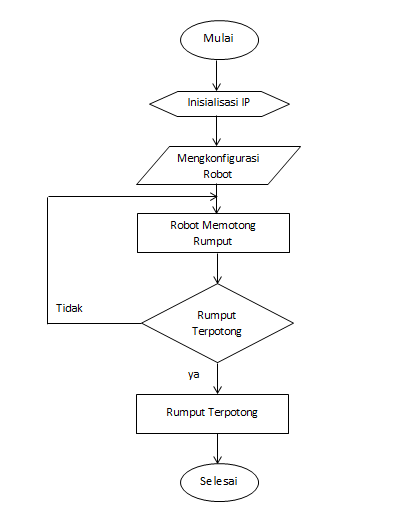
Dapat dijelaskan pada gambar 3.4, flowchart sistem sistem pemotongan rumput taman menggunakan raspberry pi yang diusulkan pada PT Dian Surya Global, diatas yaitu terdiri dari:
- 2 (dua) simbol terminal, yang berperan sebagai “Mulai” dan “Selesai” pada aliran proses flowchart sistem pemotongan rumput taman menggunakan raspberry pi yang berjalan.
- 1 (satu) simbol preparation, yang menyatakan proses persiapan awal untuk memulai sistem tersebut.
- 1 (satu) simbol data, yang menyatakan situasi konfigurasi pada robot pemotong rumput tersebut
- 2 (dua) simbol process, yang menyatakan sebuah proses robot yang bekerja memotong rumput dan menyatakan proses rumput terpotong
- 1 (satu) simbol decision, yang berperan untuk menunjukan sebuah langkah pengambilan keputusan jika “ya” dan “tidak”, yaitu: Apakah rumput pada taman di potong atau tidak. Jika ya perintah akan di proses tapi jika tidak akan memulai proses memotong rumput kembali.
5. Cara Kerja Alat
A. Input
Proses input terjadi pada saat ip addres raspberry robot dipanggil di web browser yang kemudian akan dimunculkan tampilan interface web browser yang berupa beberapa tombol button yang berfungsi sebagai pengontrol robot ketika tombol tersebut ditekan.
B. Proses
1. Pengendalian
Pada saat salah satu tombol perintah ditekan, maka tombol tersebut akan mengaktifkan JavaScript yang berjalan pada halaman web. Kemudian javascript tersebut akan mengekseskusi program python pada web server yang akan mengaktifkan salah satu GPIO pada Raspberry Pi B+. GPIO tersebut akan mengalirkan tegangan listrik ke motor driver L298n atau motor servo yang kemudian akan menggerakkan gearbox motor DC atau gripper.
2. Pergerakan Pisau Pemotong
Motor servo terpasang pada bagian belakang pisau pemotong, robot akan berfungsi sebagai pengerak pisau pemotong keatas dan kebawah dengan menekan tombol pada web intercafe yang telah dibuat. Pisau Pemotong terpasang pada bagian paling depan robot yang berfungsi untuk memotong rumput pada taman. Pisau Pemotong akan bergerak sesuai dengan tombol perintah button yang ditekan.
C. Output
Pada penelitian ini memakai 6 Pin GPIOs ebagai alat output yaitu, pin GPIO 17,18 yang berfungsi sebagai output pada motor servo dan pin GPIO 22, 23, 24 dan27 sebagai output motor driver. Setelah input dan proses selesai maka hasil output dari robot pemotong rumput ialah bergeraknya motor dc dan pisau pemotong yang telah terpasang dapat berfungsi memotong rumput dan dikendalikan melalui web browser.
6. Blok Diagram
Berikut blok diagram berserta alur kerjanya untuk purwarupa robot pemotong taman pada gambar 3.5. Pada umumnya sistem pengendalian terdiri dari banyak komponen, maka untuk menyederhanakan dalam menganalisa digunakan diagram blok. Dimana tiap-tiap komponen digambarkan oleh sebuah kotak yang mempunyai input dan output, sedangkan didalamnya dituliskan bentuk transfer fungtions dari komponennya.
Pemotongan rumput bertujuan untuk merapihkan taman dan untuk membersihkan ladang dari rumput ilalang atau rumput jenis lainnya. Alat pemotong rumput yang biasa digunakan terbuat dari plat baja yang tipis, keras dan sangat tajam, sehingga dapat dengan mudahnya memotong rumput. Agar mudah dipahami maka penulis membuat diagram blok dan alur kerjanya sebagai berikut :
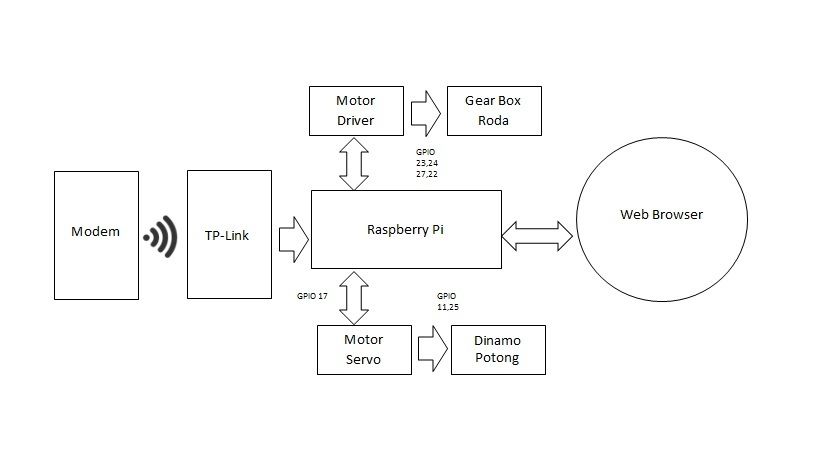
Gambar 3.5 Blok Diagram
Keterangan:
- Modem merupakan perangkat yang digunakan sebagai akses koneksi wifi
- TP-Link merupakan perangkat yang digunakan untuk mencari ip address.
- Raspberry merupakan perangkat yang digunakan untuk menjalankan aplikasi atau perintah program.
- Motor Driver berfungsi sebagai output, yaitu sebagai alat penggerak untuk mendukung kinerja pada alat tersebut.
- Gear Box merupakan salah satu komponen utama motor yang disebut sebagai transmisi, berfungsi untuk memindahkan dan mengubah tenaga.
- Dianamo merupakan perangkat yang merubah energi listrik menjadi energi gerak.
- Web Browser digunakan untuk menjalakan aplikasi berbasis web sebagai pengontrolan robot pemotong rumput.
Analisa Sistem Yang Bejalan
Motode analisa yang digunakan adalah dengan metode data flow diagram (DFD), menggunakan suatu alat pembuatan model yang sering digunakan, khususnya bila fungsi-fungsi sistem merupakan bagian yang lebih penting dan kompleks dari pada data yang di manupulasi oleh sistem. Dengan kata lain, pembuatan model alat yang memberikan penekanan hanya pada fungsi sistem.
- DFD Level 0 (Diagram Konteks)
Di dalam DFD level 0(diagram Konteks) hanya terdapat satu prosesor (Raspberry Pi) yang terhubung empat entitas, yaitu Web Browser, Motor Driver, Motor Servo, dan Dinamo Potong. Lebih jelasnya dapat dilihat pada gambar 3.6 berikut ini. - DFD Level 1
DFD level 1 berikut ini mempersentasikan tiga modul proses yang terdapat pada Raspberry Pi. Lebih jelasnya dapat dilihat pada gambar 3.7 berikut ini.
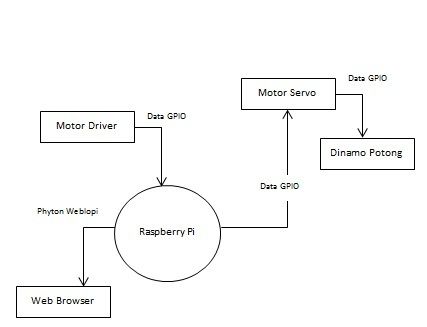
Gambar 3.6. DFD Level 0
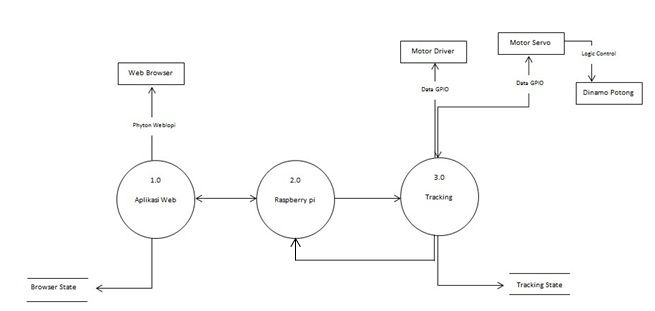
Gambar 3.7. DFD Level 1
Pembuatan Alat
Pada perancangan ini akan dibahas mengenai perancangan perangkat keras (hardware) dan perancangan perangkat lunak (software). Dari kedua pembahasan perancangan ini dianggap penting untuk dibahas karena ingin menghasilkan sistem yang baik, serta menghasilkan sinkronisasi antara perangkat keras dengan perangkat lunak. Gambaran secara umum berupa diagram blok rancangan alat adalah seperti yang di tunjukkan pada gambar 3.5. Perancangan sistem keseluruhan memerlukan beberapa alat dan bahan yang digunakan dengan deskripsi alat dan bahan sebagai berikut:
a. Alat yang digunakan meliputi:
1. Laptop atau iPad
2. Software PuTTY
3. Software XRDP
4. Bor
5. Tang dan obeng
b. Sedangkan bahan-bahan yang digunakan:
1. Raspberry Pi B+
2. USB Wireless TP-Link WN722N
3. Modem Wirelles
4. Catu daya (Ultrafire)
5. Power Bank
6. Motor Driver L298N
7. Motor Servo MG996 Metal Gear
8. Gearbox motor DC
9. Roda
10. Dinamo
11. Kabel jumper female
12. Acrylic
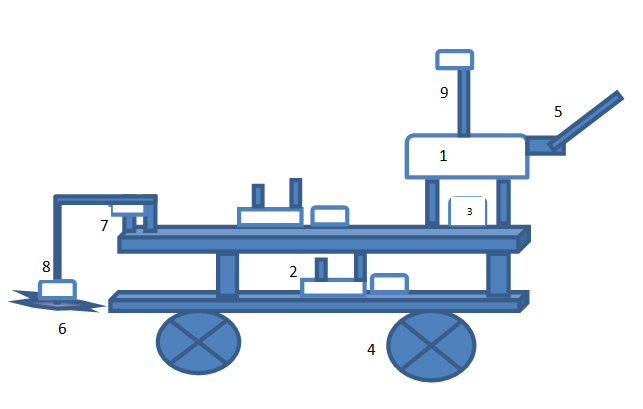
Gambar 3.8. Perancangan Fisik Robot
Tabel 3.3 Keterangan Fisik Robot
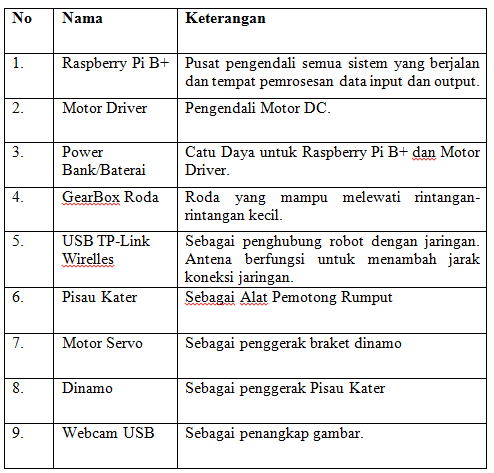
Perangkat Keras (Hardware)
1. Rangkaian Sistem Raspberry Pi
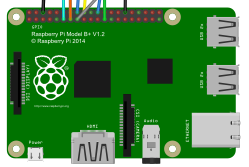
Gambar 3.9. Perancangan Sistem Raspberry Pi
Keterangan:
1. Pin 16 GPIO 23 , digunakan untuk menggerakan gearbox pada motor driver
2. Pin 18 GPIO 24, digunakan untuk menggerakan gearbox pada motor driver
3. Pin GPIO 27, digunakan untuk menggerakan gearbox pada motor driver
4. Pin 15 GPIO 22, digunakan untuk menggerakan gearbox pada motor driver
5. Pin 11 GPIO 17, berfungsi untuk menggerakkan motor driver
6. Pin 23 GPIO 11, berfungsi untuk menggerakkan dinamo pisau pemotong
7. Pin 22 GPIO 25 , berfungsi untuk menggerakkan dinamo pisau pemotong
2. Rangkaian Motor Driver L298N
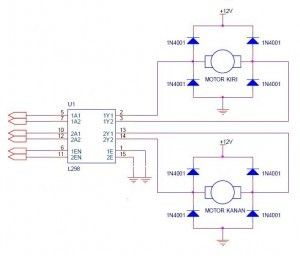
Gambar 3.10. Skema Pin Motor Driver L298N
Dalam rangkaian ini pin Enable A dan B untuk mengendalikan jalan atau kecepatan motor, pin Input 1 sampai 4 untuk mengendalikan arah putaran. Menggerakkan motor DC membutuhkan arus 4A dan tegangan maksimum 6-9 VoltDC untuk satu kanalnya. Pin Enable diberi VCC 5 Volt untuk kecepatan penuh dan PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya
3. Rangkaian Power Supply (Catu Daya)
Catu daya merupakan bagian yang sangat penting. Karena tanpa adanya catu daya, maka semua rangkaian tidak akan bekerja. Rangkaian ini berfungsi untuk mensuplay tegangan keseluruh rangkaian yang ada. rangkaian catu daya yang dibuat mempunyai keluaran 9 volt digunakan untuk mensuplay tegangan ke komponen motor servo, 5 volt digunakan untuk mensuplay tegangan ke komponen raspberry pi, 12 volt digunakan untuk mensuplay tegangan ke komponen modul l298n pada gearbox dan l298n pada pisau pemotong. Rangkaian catu daya ditunjukan pada gambar 3.11
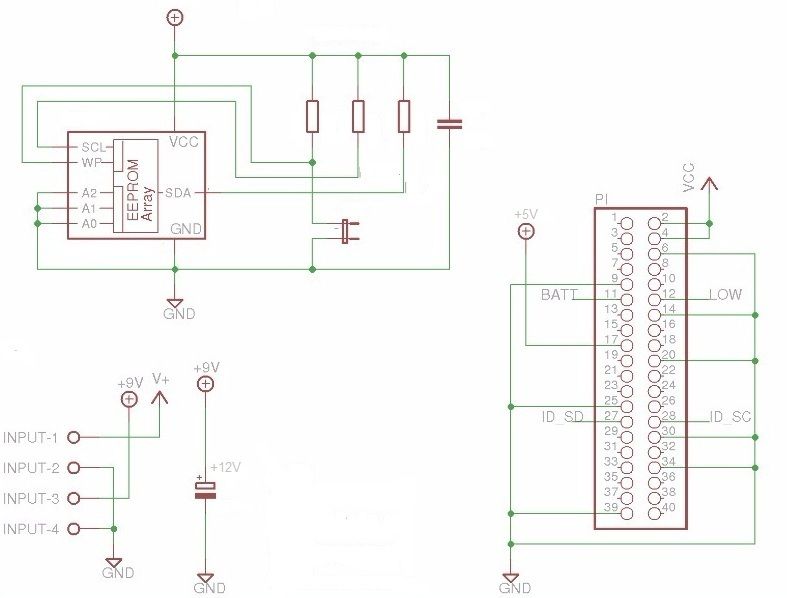
Gambar 3.11 Rangkaian catu daya
Keterangan:
- Tegangan masuk sebesar 5V yang didapat dari sumber tegangan kerja komponen untuk raspberry pi.
- SDA, digunakan menurunkan tegangan menjadi +12V yang digunakan sebagai tegangan kerja komponen ke modul l298n pada gerabox dan l298n pada pisau pemotong
- A1, digunakan menurunkan tegangan menjadi +9V yang digunakan sebagai tegangan kerja komponen motor servo.
4. Rangkaian Sistem Keseluruhan
Setelah melakukan perancangan perangkat keras dari seluruh komponen dan bahan yang digunakan, maka rangkaian sistem secara keseluruhan akan terlihat seperti pada gambar 3.12:
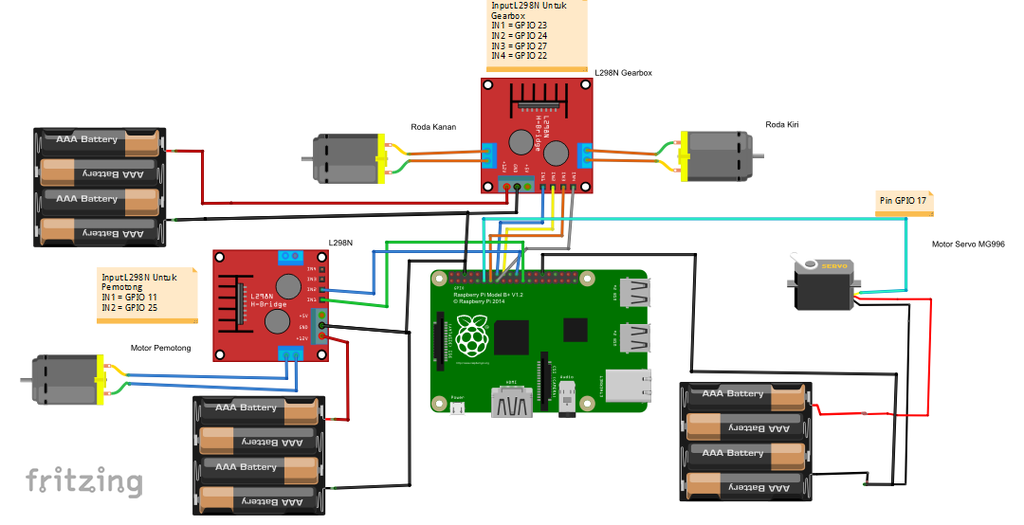
Gambar 3.12. Rangkaian Sistem Keseluruhan
Keterangan dari jalur-jalur diatas:
1. Jalur Merah sebagai VCC (+) masukan untuk tegangan kerja komponen
2. Jalur Hitam sebagai arus negatif (-)
3. Jalur Orange sebagai arus data
4. Jalur Biru sebagai arus data
5. Jalur Hijau sebagai arus data
Perancangan Perangkat Lunak (Software)
Perancangan Web Interface
Robot ini dikendalikan secara langsung melalui media nirkabel dengan interface sebuah halaman web. Tampilan web page sebagai kendali robot ini dirancang sesederhana mungkin agar user mudah untuk mengoperasikan robot. Fungsi dari masing-masing kolom dalam web interface adalah sebagai berikut:
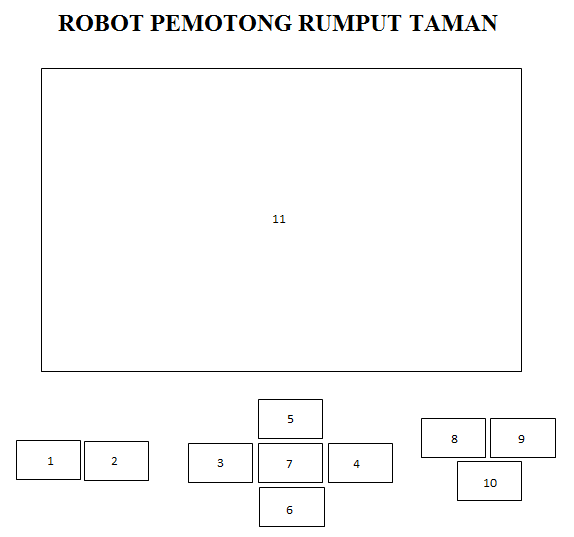
- Hidup
- Mati
- Kiri
- Kanan
- Maju
- Mundur
- X
- Atas
- Bawah
- X
- Stream Kamera
Perancangan Aplikasi Web Interface

- Python
- Java
- HTML
1. Instalasi Web IOPi
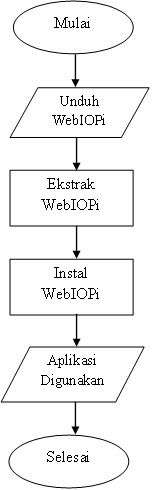




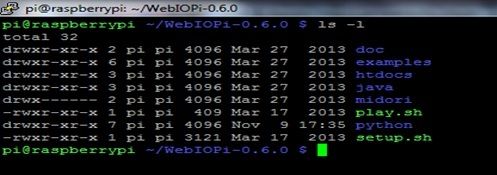
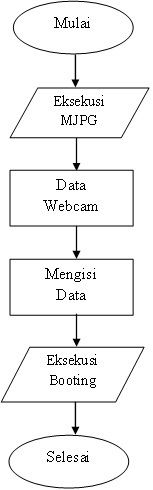

- Mjpg_streamer –i
- –d
- -r
- -f
- -p
- -w
- Membuat data berekstensi .sh pada folder /usr/sbin
- Simpan data tersebut dengan berikan akses exec
- Buat link agar data ini bisa diakses dari folder apapun
- Pastikan data ini tereksekusi pada saat Raspberry Pi dinyalakan




Permasalahan yang dihadapi dan Alternatif Pemecahan Masalah
Permasalahan Yang Dihadapi
Permasalahan yang sering dihadapi oleh karyawan adalah pada saat kegiatan pemliharaan taman berlangsung, karena sebuah taman pada dasarnya sangatlah luas. Maka dari itu butuh perhatian khusus untuk mengoptimalkan pertumbuhan rumput-rumput yang ada di taman. Secara umum, perawatan taman masih mengandalkan sumber daya manusia untuk memotong rumput yang merambat menutup tanah dengan menggunakan gunting pemotong rumput atas mesin pemotong. Hal ini membuat pekerjaan pemotongan rumput menjadi beban bagi karyawan itu sendiri, terlebih lagi untuk kegiatan perawatan taman dan pemotongan rumput ini tidak dapat didelegasikan ke orang lain.
Dari permasalahan-permasalahan yang telah dijelaskan di atas, maka dapat dikesimpulan bahwa perawatan taman dalam kegiatan pemotongan rumput masih dilaksanakan secara manual oleh karyawan
Alternatif Pemecahan Masalah
Setelah dijabarkan permasalahan yang sedang dihadapi diatas, maka penulis akan membuatkan alternatif pemecahan masalah. Alternatif pemecahan masalahnya adalah membuat dan merancang purwarupa robot pemotong rumput taman untuk membantu alam melakukan kegiatan perawatan taman dan pemotongan rumput agar terlihat rapih dan asri
User Requirement
Elisitasi Tahap I
Elisitasi tahap I berisi rancangan sistem baru yang diusulkan oleh pihak menajemen terkait melalui proses wawancara.
Tabel 3.4 Elisitasi Tahap I
Functional | |
No. | Analisa Kebutuhan |
Saya ingin sistem : | |
1 |
Sistem sederhana dan mudah dioperasikan |
2 |
Tampilan Interface pengontrolan user friendly sehingga mudah dipahami oleh pengguna |
3 | Jarak pengontrolan dengan alat yang tidak terbatas |
4 | Pengontrolan melalui wirelles |
5 | Pengontrolan melalui jaringan nirkabel |
6 | Diakses melalui iPad |
7 | Diakses melalui PC (Personal Computer) |
8 | Diakses melalui semua perangkat yang mempunyai web browser |
9 | Menampilkan Login Form |
10 | Menampilkan tombol pengontrolan |
11 | Menampilkan pemberitahuan eror connection apabila nama pengguna dan sandi salah |
12 | Memiliki Id dan Password |
13 | Mempunyai DNS (Domain Name Server) |
14 | Terhubung online dengan intenet |
15 | Membuat sistem pengontrolan menjadi lebih efisien |
16 | Dinamo Pemotong dapat bergerak |
| Non Functional | |
| No | Saya ingin sistem : |
|
1 | Sistem berjalan dengan baik |
2 | Kompetibel dengan seluruh perangkat web browser |
Penyusun
(Luvia Giantika septiani) | |
Stakeholder
(Endang Kurnaedi) | |
Elisitasi Tahap II
Elisitasi tahap II dibentuk berdasarkan Elisitasi Tahap I yang kemudian diklasifikasikan lagi dengan menggunakan Metode MDI. Metode MDI ini bertujuan untuk memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh penulis untuk dieksekusi. Berikut ini adalah penjelasan mengenai MDI:
- M pada MDI artinya Mandatory (dibutuhkan atau penting)
Maksudnya, elisitasi tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru. - D pada MDI artinya Desirable (diinginkan atau tidak terlalu penting)
Maksudnya, elisitasi tersebut tidak terlalu penting dan boleh dihilangkan, tetapi jika elisitasi tersebut digunakan dalam pembuatan sistem maka membuat sistem tersebut lebih sempurna. - I pada MDI artinya Inessential (diluar sistem atau dieliminasi)
Maksudnya, adalah elisitasi tersebut bukan bagian dari sistem yang dibahas dan merupakan bagian dari luar sistem.
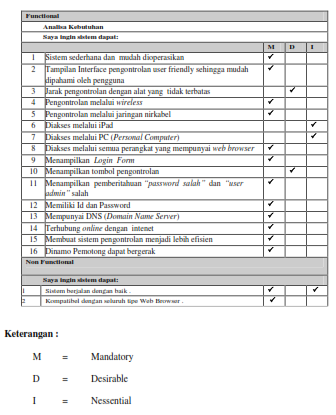
Elisitasi Tahap III
Elisitasi tahap III merupakan hasil penyusutan dari elisitasi tahap II dengan cara mengeliminasi semua elisitasi yang option-nya "I" pada metode MDI. Selanjutnya semua elisitasi yang tersisa diklasifikasikan kembali dengan metode TOE dengan opsi LMH. Berikut ini adalah penjelasan mengenai TOE:
- T (Technical)
Maksudnya, adalah pertanyaan perihal bagaimana tata cara atau teknik pembuatan elisitasi tersebut dalam sistem yang diusulkan? - O (Operational)
Maksudnya, adalah pertanyaan perihal bagaimana tata cara penggunaan elisitasi tersebut dalam sistem yang akan dikembangkan? - E (Economic)
Maksudnya, adalah pertanyaan perihal berapakah biaya yang diperlukan guna membangun elisitasi tersebut didalam sistem?
Metode tersebut dibagi kembali menjadi beberapa option, antara lain:
- L (Low) : Mudah untuk dikerjakan.
- M (Middle) : Mampu untuk dikerjakan.
- H (High) : Sulit untuk dikerjakan karena teknik pembuatan dan penggunaannya sulit serta biayanya mahal, sehingga elisitasi tersebut harus dieliminasi.

Final Draft Elisitasi
Final Draft Elisitasi merupakan bentuk akhir dari tahap-tahap elisitasi yang dapat dijadikan acuan dan dasar untuk mengimplementasikan sistem pembuka dan penutup meja kantor berbasis arduino uno menggunakan voice pada PT. Fosta Unggul Perdana. Berdasarkan Elisitasi Tahap III di atas, dihasilkan Final Draft Elisitasi yang diharapkan dapat mempermudah penulis dalam mengimplementasikan sistem.
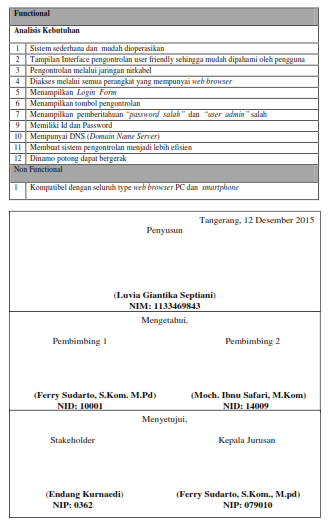
BAB IV
Uji Coba
Setelah melakukan perancangan dan pemasangan komponen, selanjutnya adalah melakukuan serangkaian uji coba pada masing-masing blok rangkaian yang bertujuan untuk mendapatkan kesesuaian spesifikasi dan hasil yang diinginkan. Untuk lebih jelas mengenai pembagian hasil uji coba dilakukan dapat dilihat pada sub bab berikut.
Metode Black Box
Berikut ini adalah tabel pengujian Black Box berdasarkan Purwarupa Pemotong Rumput Taman Menggunakan Raspberry Pi Pada PT Dian surya Global, untuk pengujian pada sistem, yaitu sebagai berikut:
1. Pengujian Black Box Sistem Pada Saat Login
Tabel 4.1 Pengujian Black Box Sistem Pada Saat Login
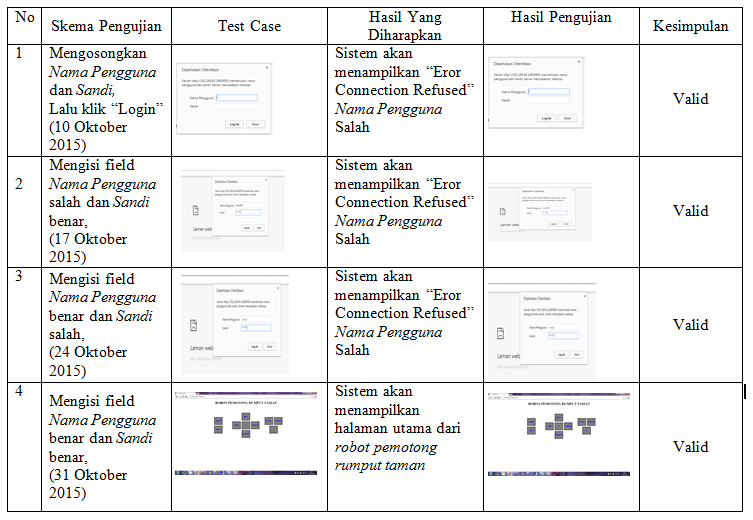
2. Pengujian Pengendali Motor Driver L298N Gearbox
Pengujian modul pengendali motor L298n dilakukan dengan cara menghubungkan dua buah motor DC pada pin output yang ada di sebelah kiri dan kanan, dan 4 buah pin GPIO Raspberry Pi B+ yang sudah diprogram sebagai inputnya. Berikut adalah tabel hasil pengujiannya:
Tabel 4.2 Pengujian Pengendali Motor Driver L298N Gearbox
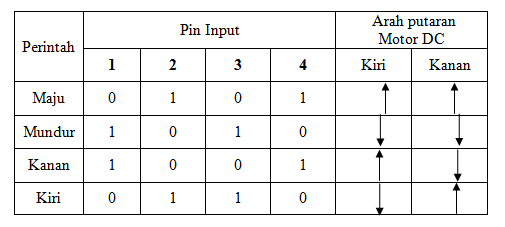
3. Pengujian Kendali Melalui Perangkat
Aplikasi yang dibuat untuk pengontrolan robot adalah sebuah aplikasi berbasis web. Aplikasi ini dibuat agar nantinya dapat dijalankan dengan menggunakan perangkat apapun yang mempunyai webbrowser. Perangkat-perangkat tersebut seperti iPad,Laptop/PC, smartphone,tablet, dan game console. Berikut adalah tabel hasil pengujian dengan perangkat-perangkat tersebut.
Tabel 4.3. Pengujian Kendali Melalui Perangkat
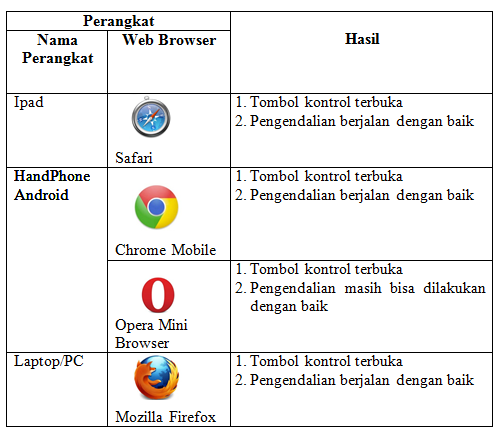
Uji Coba Hardware
Sebelum program hardware pemotong rumput taman dimasukkan kedalam raspberry pi, maka harus dilakukan sebuah uji coba. Uji coba kali ini menggunakan simulator pada papan breadboard untuk dasar konstruksi sebuah desain sirkuit elektronik analog dan digital kecil sampai membuat unit pengolahan terpusat. Berikut adalah hasil dari pengujian.
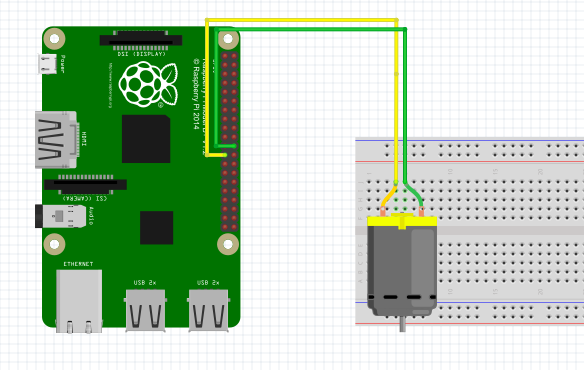
Gambar 4.1 Pengujian menggunakan papan breadboard
1. Pengujian Pengendali Pisau Pemotong
Pengujian pisau pemotong dilakukan menggunakan Motor Servo MG996 Metal Gear yang dihubungkan dengan dinamo sebagai penggerak pisau pemotong rumput dengan rangkaian baterai yang masing-masing mempunyai tegangan berbeda. Rangkaian-rangkaian baterai ini dibuat dengan hubungan serial dan berbeda jenis baterainya. Berikut adalah tabel pengujian pemakaian baterai hingga daya baterai habis:
Tabel 4.4 Pengujian Pengendali Pisau Pemotong
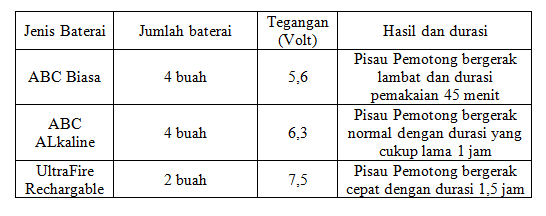
2. Pengujian Jarak Kendali Pada Jaringan Lokal
Untuk pengujian ini penulis menggunakan sebuah Mobile Wireless Access point sebagai penghubung antara client dengan Web Server pada Robot. Berikut ini, adalah hasil uji coba pengendalian jarak yang dilakukan pada ruangan terbuka dan tertutup:
Tabel 4.5. Uji Coba Jarak Pada Ruang Tertutup
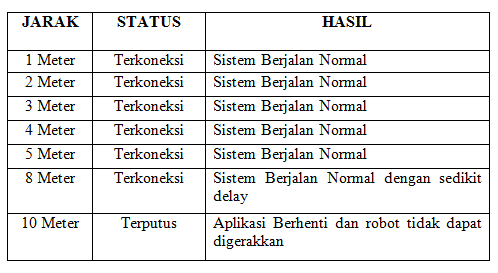
Tabel 4.6. Uji Coba Jarak Pada Ruang Terbuka
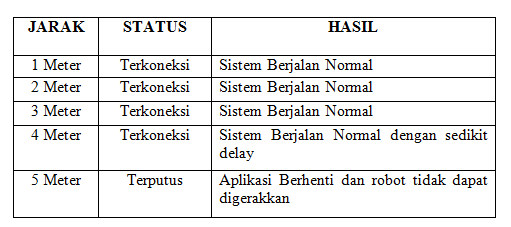
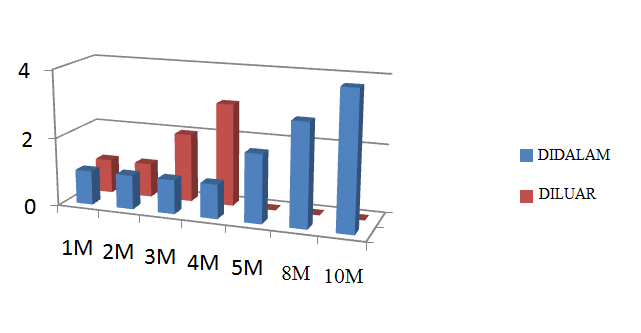
Gambar 4.1. Grafik Uji Coba Jarak Pada Jaringan Lokal
Pengujian Rangkaian Catu Daya
Catu daya yang digunakan ialah dua buah IC regulator, yaitu L298N dan MG996. Pengujian dilakukan dengan memberikan tegangan DC yang dihubungkan pada kaki masukan masing-masing IC tersebut. Kemudian keluaran dari IC regulator diukur dengan menggunakan voltmeter. Hasil pengukuran keluaran IC regulator dapat dilihat pada Tabel 4.7 berikut ini.
Tabel 4.7 Hasil Rangkaian Pengujian Catu Daya
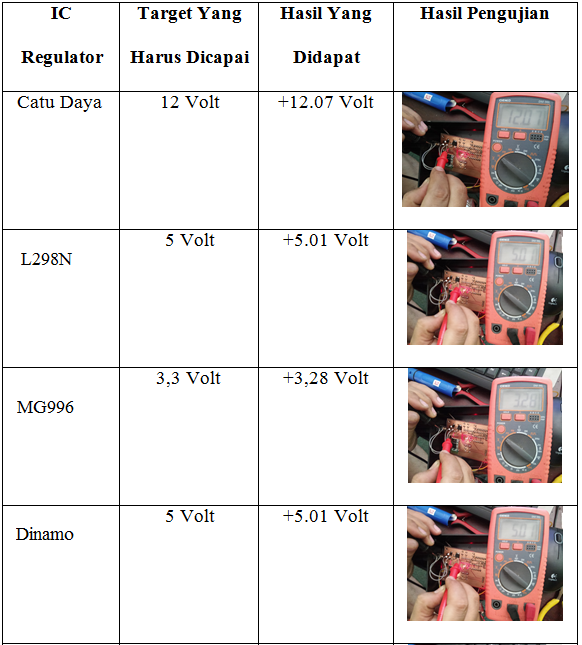
Keterangan tabel :
- Tegangan keluaran tanpa beban, diukur pada keluaran Catu Daya, dimana idealnya tegangan keluaran dari Catu Daya adalah tepat 12 Volt, tetapi karena ada unsur ketidak sempurnaan produk, maka toleransi penyimpangan sebesar:
- Tegangan keluaran tanpa beban, diukur pada keluaran IC-L298N, dimana idealnya tegangan keluaran dari IC-L298N adalah tepat 5 Volt, tetapi karena ada unsur ketidak sempurnaan produk, maka toleransi penyimpangan sebesar:
- Tegangan keluaran tanpa beban, diukur pada keluaran IC-MG996, dimana idealnya tegangan keluaran dari IC-MG996 adalah tepat 3,3 Volt, tetapi karena ada unsur ketidak sempurnaan produk, maka toleransi penyimpangan sebesar:
- Tegangan keluaran tanpa beban, diukur pada keluaran DC, dimana idealnya tegangan keluaran dari DC adalah tepat 5 Volt sesuai dengan data sheet yang mengikuti daya power supply, tetapi karena ada unsur ketidak sempurnaan produk, maka toleransi penyimpangan sebesar:



Dari hasil pengujian rangkaian catu daya didapatkan hasil yang masih dalam batas toleransi yang diizinkan, sehingga pada rangkaian catu daya ini sudah dapat digunakan dengan baik.
Pengujian Alat
Flowchart Program
Analisa
Analisa Program Pada Raspberry Pi
Analisa Program Pada Web Interface
Implementasi
Schedule
- Pengumpulan Data
Proses pengumpulan data dilakukan untuk mencari sumber dan mengetahui beberapa teori yang digunakan dalam pembuatan sistem dilakukan selama 20 minggu dimulai dari pada saat Kuliah Kerja Praktek (KKP) dan sampai Skripsi yaitu antara 25 Oktober 2014 s/d 10 Desember 2014 dilanjutkan 15 Agustus 2015 s/d tanggal 28 September 2015. - Analisa Sistem
Analisa sistem ini dilakukan untuk mengetahui komponen apa saja yang dibutuhkan dalam sistem dan mendiagnosis persoalan yang ada untuk memperbaiki sistem. Analisa sistem dilakukan selama 10 minggu (1 Agustus 2015 s/d tanggal 9 Oktober 2015). - Perancangan Sistem
Dalam perancangan sistem ini terbagi menjadi dua, perancangan hardware dan software merupakan proses yang dilakukan seorang peneliti agar dapat menghasilkan suatu rancangan yang mudah dipahami oleh user. Perancangan sistem dilakukan selama 11 minggu. - Pembuatan Program
Pembuatan program dilakukan untuk menyempurnakan suatu sistem agar system yang telah dirancang dapat berjalan dengan baik. Pembuatan program dilakukan selama 10 minggu yaitu dimulai dari minggu ke 4 bulan Agustus 2015 sampai minggu ke 2 bulan November 2015. - Testing program
Testing Program dilakukan untuk mengetahui kesalahan-kesalahan yang ada pada program pada saat program di running. Testing program dilakukan yaitu dimulai dari minggu ke 4 bulan September 2015 sampai dengan minggu ke 4 bulan November 2015. - Evaluasi Sistem
Untuk mengetahui kesalahan dan kekurangan dari program yang dibuat maka perlu dilakukan evaluasi program, kegiatan ini dilakukan selama 11 minggu, yaitu minggu ke 3 bulan September 2015 sampai dengan minggu ke 1 bulan Desember 2015. - Perbaikan Sistem
Penambahan atau pengurangan pada point-point tertentu yang tidak diperlukan, sehingga program benar-benar dapat dioptimalkan sesuai kebutuhan user. Perbaikan program dilakukan selama 5 minggu yaitu pada bulan Oktober 2015 sampai November 2015. - Training User
Percobaan alat yang diujicobakan bersama para user untuk mengetahui apakah alat yang dibuat sudah dapat berjalan dengan optimal atau tidak. Testing User dilakukan selama 3 minggu yaitu antara minggu ke 1 November 2015 sampai minggu ke 2 Desember 2015. - Implementasi Sistem
Setelah diketahui kelayakan dari program yang dibuat, maka akan dilakukan implementasi program. Dan implementasi program dilakukan selama 6 minggu bersamaan dengan testing user yaitu pada minggu ke 4 Juli 2015 sampai Minggu ke 4 Agustus 2015. - Dokumentasi
Sistem yang dibuat didokumentasikan selama penelitian dan perancangan berlangsung.
Tabel 4.20 Time Schedule Implementasi Program
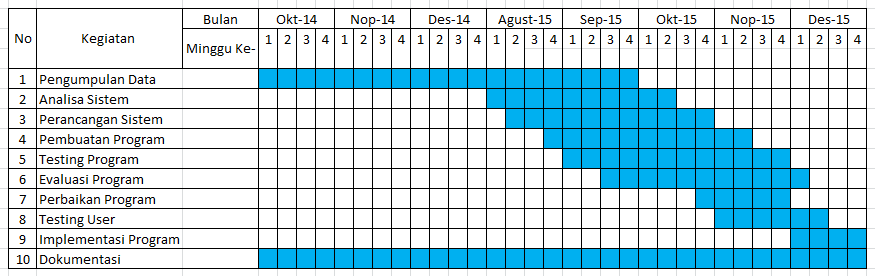
Estimasi Biaya
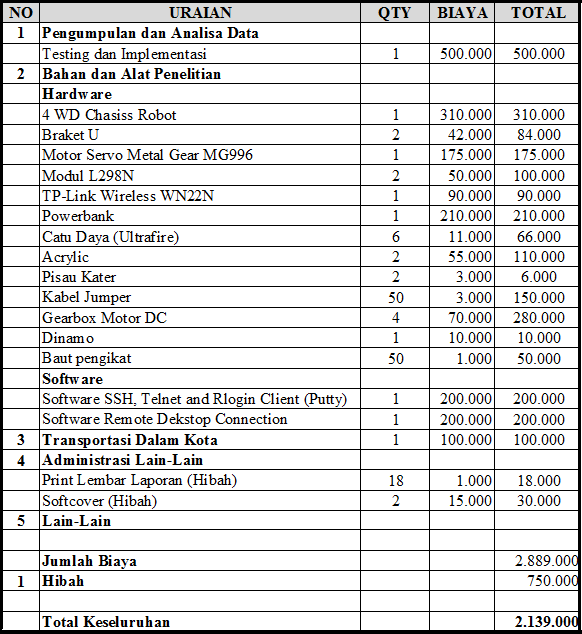
BAB V
Kesimpulan
Dari hasil perancangan alat dan pembahasan prototype pengontrolan running text menggunakan voice di atas dapat diambil beberapa kesimpulan, di antaranya :
1. Prototipe alat ini menggunakan Smartphone Android dan arduino uno, android di gunakan untuk menerima inputan suara yang nantinya akan di proses oleh arduino, media komunikasi yang di gunakan oleh arduino dan android adalah data serial yang menggunakan Bluetooth HC-05
2. Pengontrolan running text pada prototype ini menggunakan sebuah applikasi android yaitu Running Text Message untuk merekam sebuah inputan suara, yang akan diproses oleh arduino yang nanti hasil outputnya akan di tampilkan pada running text
3. Prototipe running text menggunakan voice ini dapat mempasilitasi pengunjung dalam proses antrian, sehingga mengurangi banyaknya antrian dalam kecamatan sepatan
Saran
Berdasarkan perancangan dan kesimpulan yang dibuat, ada beberapa saran untuk penambahan fitur-fitur yang bisa di implementasikan untuk pengembangan, yaitu
1. Robot ini dapat ditambahkan sensor-sensor untuk mendeteksi sesuatu yang dapat memberikan informasi lebih banyak dari sekedar visualisasi
2. Pengendalian robot bisa dilakukan dengan menggunakan suara manusia (voice control). Hal ini dapat dilakukan dengan cara penambahan daftar kode python.
3. Konstruksi robot dapat dibuat kompatibel dengan berbagai medan dan berbagai cuaca
Kesan
DAFTAR PUSTAKA
- ↑ Pratama, I Putu Agus Eka. 2014. Sistem Informasi dan Implementasinya. Bandung: BI Obses
- ↑ Prhasta, Eddy. 2014. Sistem Informasi Geografis. Bandung: BI Obses
- ↑ 3,0 3,1 3,2 3,3 Darmawan. Deni. Verzello/John Reuter III. 2013. Sistem Informasi Manajemen. PT Remaja Rosdakarya Offset : Bandung.
- ↑ Al-Jufri. 2011. Sistem Informasi Manajemen Pendidikan. Jakarta: PT. Smart Grafika
- ↑ 5,0 5,1 5,2 5,3 5,4 Erinofiardi, Nurul Imam Supardi, Rendi. 2012. Penggunaan PLC Dalam Pengontrolan Temperatur,simulasi pada prototype ruangan. Jurnal Mekanikal,Vol.2 No.2 Juli 2012: 261-268. 2012. Universitas Bengkulu: Bengkulu
- ↑ 6,0 6,1 6,2 6,3 6,4 6,5 Simarmata, Janner. 2010. Rekayasa Perangkat Lunak. Yogyakarta: CV Andi Offset.
- ↑ Taufiq, Rohmat. 2013. Sistem Informasi Manajemen. Yogyakarta: Graha Ilmu.
- ↑ Darmawan, Deni. 2013. Sistem Informasi Manajemen. Bandung: PT. Remaja Rosdakarya Offset. [1]
- ↑ , Priyanto,Agus 2013 “Balai Pene;Itian Budidaya Tanaman Pangan Di Yogyakarta“Skipsi.Tidak Dipublikasi Yogyakarta. Universitas Atma Jaya Yogyakarta
- ↑ Gerry foe, fendy 2013 “Rancangan Bangun Sistem Informasi Monitoring Debitur LintigasiDi PT Bank Tabungan Negara Pada Area Collection III Surabaya “Kuliah Kerja Praktek Tidak Dipublikasi Surabaya.Stikom Surabaya
- ↑ 11,0 11,1 11,2 Sulindawati, dan Muhammad Fathoni. 2010. Pengantar Analisa Perancangan “Sistem” . Medan: STMIK Triguna Dharma. Vol. 9, No. 2, Agustus 2010.
- ↑ Adelia, dan Jimmy Setiawan. 2011. Implementasi Customer Relationship Management (CRM) pada Sistem Reservasi Hotel berbasisi Website dan Desktop.Bandung: Universitas Kristen Maranatha. Vol. 6, No. 2, September 2011:113-126.
- ↑ Tom Schrijvers and Peter Thiemann. 2012. [2] Functional and Logic Programming
- ↑ Dr. Deni Darmawan, S.Pd., M.Si, Kunkun Nur Fauzi. 2013. Sistem Informasi Manajemen. Bandung: PT Remaja Rosdakarya.
- ↑ Rosa A.S, M. Shalahuddin. 2013. Rekayasa Perangkat Lunak. Bandung: Informatika Bandung.
- ↑ 16,0 16,1 16,2 16,3 Sutabri, Tata. 2012. Analisis Sistem Informasi. Yogyakarta: CV. Andi Offset.
- ↑ 17,0 17,1 17,2 17,3 17,4 17,5 17,6 17,7 Guritno, Suryo, Sudaryono dan Untung Rahardja. 2011. Theory and Application of IT Research Metodologi Penelitian Teknologi Informasi. Yogyakarta: CV. Andi Offset.
- ↑ Semiawan, Conny. R. 2010. Metode Penelitian Kualitatif. Jakarta: Grasindo.
- ↑ Hermawan. Asep. 2009. Penelitian Bisnis. Jakarta: Grasindo.
- ↑ Siahaan, Daniel. 2012. Analisa Kebutuhan dalam Rekayasa Perangkat Lunak. Andi: Yogyakarta
- ↑ 21,0 21,1 Beni,Anggoro.2013. Desain Pemodelan Kinematik Dan Dinamik Humanoid Robot,pada Universitas Di Ponegoro Semarang.
- ↑ Wiley, Jhon. 2014. Adventure in Raspberry Pi. Amazone's Book Store [3]
- ↑ Richardson, Matt. 2013. Getting Started with Raspberry Pi. Amazone's Book Store [4]
- ↑ 24,0 24,1 William,Harington.2015”LearningRaspbian”.Brimingham:Packt Publishing.
- ↑ Hakim, Nurman. 2009. Sejarah dan Perkembangan Linux. Diambil dari: [5]. (Tanggal akses 11 Agustus 2015).
- ↑ Triasanti, Dini. 2012. Universitas Gunadarma. Diambil dari: dini3asa.staff.gunadarma.ac.id. (Tanggal akses 21 November 2014).
- ↑ Waridah, Ernawati.2014.”Kamus Bahasa Indonesia”.Bandung:PT Kawan Pustaka. [6]
- ↑ 28,0 28,1 28,2 Kadir,Abdul.2013.”Panduan Praktis Mempelajari Aplikasi Mikrokontroler dan Pemrogramannya Menggunakan Arduino”.Yogyakarta:Andi [7]
- ↑ 29,0 29,1 29,2 29,3 29,4 29,5 29,6 Winarno dan Deni Arifianto.2011.”Bikin Robot itu gampang”.Jakarta Selatan:PT Kawan Pustaka. [8]
- ↑ Hermawan,Sandy dan Choirul Banun.2014.”Top Pocket No.1 Fisika SMA Kelas X,XI&XII”.Jakarta Selatan:PT.Wahyumedia.[9]
- ↑ Hidayat, Wahyu 2010. dengan Materi Ajar “Pengantar Multimedia”.
- ↑ 32,0 32,1 Gunawan, Putu Nopa. 2011. Laporan Praktikum Rangkaian Listrik dan Rangkaian Logika Power Supply. Universitas Hasanuddin
- ↑ Sofana,Iwan. CISCO & CCNA Jaringan Komputer. Informatika Bandung, Bandung 2012 halaman 244
- ↑ TP-LINK. Technologies Co, Ltd. 2014. 150Mbps High Gain Wireless USB Adapter TL-WN722N. Diambil dari: TP LINK WN722N. (Tanggal akses 16 November 2014).
- ↑ Sunarto.2010.” Informasi &Komunikasi”.Jakarta:PT.Grasindo.
- ↑ Rohman, Abdul Rasyid dan Puspita, Rani Fauzi 2012 . Robot Cinung Pemotong Rumput dan Penyapu Halaman. Jurnal Penelitian Ilmiah. Tidak dipublikasi.Bandung: UIN Sunan Gunung Djati. [10]
- ↑ Arizal, Fauzi. 2014. Pengendali Robot Pemotong Rumput Melalui Android dengan Bluetooth berbasis Arduino. Skripsi. Tidak dipublikasi. Jakarta:Universitas Gunadarma [11]
- ↑ Satrio, Riko. 2011. Robot Pemotong RumputBerbasis Mikrokontroler DT-Basic Nano System. Skripsi. Tidak diPublikasi. Jambi: STIKOM Dinamika Bangsa.
- ↑ Syam, Rafiuddin dan Ohoiwutun, Johanes. 2013. Uji Eksperimen Untuk Trajectory Tracking Mesin Pemotong Rumput Tenaga Surya. Jurnal Penelitian Ilmiah. Tidak dipublikasi. Makassar: Unniversitas Hasanuddin.
- ↑ Wahyudin, Muhamad. 2014. Prototipe Robot Pemotong Rumput Taman Berbasis Raspberry Pi B+ Menggunakan Web Browser pada kantor Kepala Desa Pasir Gadung. Skripsi. Tangerang. STMIK Raharja.