1233473350: Perbedaan revisi
| [revisi tidak terperiksa] | [revisi tidak terperiksa] |
1233473350 (bicara | kontrib) |
1233473350 (bicara | kontrib) |
||
| Baris 3.361: | Baris 3.361: | ||
<div style="font-size: 12pt;font-family: 'times new roman';text-align: justify;text-indent: 0.05in"> | <div style="font-size: 12pt;font-family: 'times new roman';text-align: justify;text-indent: 0.05in"> | ||
| − | <p style="line-height: 2"Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklasifikasikan kembali melalui metode TOE, yaitu: | + | <p style="line-height: 2"> Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklasifikasikan kembali melalui metode TOE, yaitu: |
1. Technical (T): bagaimana tata cara atau teknik pembuatan requirement dalam sistem yang diusulkan? | 1. Technical (T): bagaimana tata cara atau teknik pembuatan requirement dalam sistem yang diusulkan? | ||
2. Operational (O) : bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan? | 2. Operational (O) : bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan? | ||
Revisi per 19 Februari 2017 01.18
ALAT PENYIRAM PESTISIDA MENGGUNAKAN QUADCOPTER
PADA DINAS PERTANIAN

Disusun Oleh :
NIM |
: 1233473350
|
NAMA |
JURUSAN SISTEM KOMPUTER
KONSENTRASI CREATIVE COMMUNICATION AND INNOVATIVE TECHNOLOGY
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2016/2017
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
LEMBAR PENGESAHAN SKRIPSI
AALAT PENYIRAM PESTISIDA MENGGUNAKAN QUADCOPTER
PADA DINAS PERTANIAN
Disusun Oleh :
NIM |
: 1233473350
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
|
Konsentrasi |
Disahkan Oleh :
Tangerang, Januari 2017
| Ketua |
Kepala Jurusan
| ||||
| STMIK RAHARJA |
Jurusan Sistem Komputer
| ||||
| (Ir. Untung Rahardja, M.T.I) |
|||||
| NIP : 000594 |
NIP : 079010
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
LEMBAR PERSETUJUAN PEMBIMBING
ALAT PENYIRAM PESTISIDA MENGGUNAKAN QUADCOPTER
PADA DINAS PERTANIAN
Dibuat Oleh :
NIM |
: 1233473350
|
Nama |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And Innovative Technology
Disetujui Oleh :
Tangerang, Januari 2017
| Pembimbing I |
Pembimbing II
| ||
| (Ilamsyah M.Kom) |
(Abert tandilintin .MT)
| ||
| NID : 14019 |
NID : 14028
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
LEMBAR PERSETUJUAN DEWAN PENGUJI
ALAT PWNYIRAM PESTISIDA MENGGUNAKAN QUADCOPTER
PADA DINAS PERTANIAN
Dibuat Oleh :
NIM |
: 1233473350
|
Nama |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Creative Communication And Innovative Technology
Tahun Akademik 2016/2017
Disetujui Penguji :
Tangerang, Februari 2017
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| ( ) |
() |
()
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
LEMBAR KEASLIAN SKRIPSI
ALAT PENYIRAM PESTISIDA MENGGUNAKAN QUADCOPTER
PADA DINAS PERTANIAN
Disusun Oleh :
NIM |
: 1233473350
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
|
Konsentrasi |
Menyatakan bahwa Laporan SKRIPSI ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan atau duplikat dari Laporan SKRIPSI yang telah dipergunakan untuk mendapatkan gelar sarjana komputer, baik dilingkungan Perguruan Tinggi Raharja, maupun Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab dan bersedia menerima sanksi jika pernyataan diatas tidak benar.
Tangerang, Januari 2017
| NIM : 1233473350
|
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
ABSTRAKSI
Pada saat ini perkembangan teknologi sangat lah cepat. Kemajuan teknologi komputer sangatlah mendukung dalam hal pengolahan data untuk membuat sesuatu sistem informasi yang di gunakan agar memberikan suatu hasil kerja yang maksimal. Kemajuan teknologi di bidang pertanian ini masih jarang sekali terjamah oleh kemajuan teknlogi di sebabkan karena masih banyak yang berpikir untuk tetap menggunakan cara tradisional, dan mereka berpikir cara tradisional lah yang paling efektif untuk digunakan, oleh karena itu penulis ingin memberikan suatu solusi yang dapat membantu meringankan pekerjaan mereka, Dan demi memberikan sesuatu standar kualitas kepada masyarakat, dengan membuat melakukan inovasi mengunakan suatu alat yg bernama quadcopter. Quadcopter adalah salah satu platform unmanned aerial vehicle (UAV) yang saat ini banyak diriset karena kemampuannya melakukan take-off dan landing secara vertikal. Karena menggunakan 4 motor brushless sebagai penggerak utama, quadcopter memiliki kompleksitas yang cukup tinggi baik dalam pemodelan maupun pengendalian. Cara kerja alat ini ialah dengan menggunakan arduino untuk melakukan penyiramanya secara otomatis dan menggunakan Quadcopter itu untuk mengkau semua area penyiramany tersebut, Maka dari itu penulis mengambil judul “Alat penyiram pestisida dengan menggunakan quadcopter pada Dinas Pertanian”, Semoga saja dengan alat ini bisa membantu perusahaan yang saya observasi ini.
Kata kunci : Metode Penyiraman, quadcopter, Dinas Pertanian.
ABSTRACT
ABSTRACT
At this time so is rapid technological development. Advances in computer technology have been more favorable in terms of data processing to create something that is in use information systems in order to provide a maximum work. The technological advances in agriculture is still rarely touched by progress teknlogi caused because many think to keep using traditional way, and they think the traditional way is the most effective to use, therefore the author wanted to provide a solution that can help alleviate their work, and in order to give something to the community quality standards, by making innovation using a contraption called quadcopter. Quadcopter is one of the platforms unmanned aerial vehicle (UAV) that is currently widely researched for its ability to take-off and landing vertically. Because it uses a brushless motor 4 as the prime mover, quadcopter have fairly high complexity of both the models and controls. The way the device works is by using arduino to do penyiramanya automatically and use Quadcopter it to mengkau all areas penyiramany the Thus the authors take the title "Sprinklers pesticides by using quadcopter at the Department of Agriculture," Hopefully with this tool can help companies that's my observation.
Keywords: watering method, quadcopter, Dinas Pertanian
KATA PENGANTAR
Bismillahirrahmanirrahim Assalamu’alaikum Wr.Wb.
Assalamu’alaikum Wr.Wb.
Segala puji dan syukur penulis panjatkan kehadirat Allah SWT atas berkat rahmat dan anugerah-Nya yang dilimpahkan kepada penulis, sehingga penulisan Laporan skripsi ini dapat terselesaikan dengan baik dan tepat pada waktunya.
Hanya karena kasih sayang dan kekuatan-Nya lah peneliti mampu menyelesaikan Laporan skripsi yang berjudul “Alat Penyiram Pestisida Menggunakan Quadcopter Pada Dinas Pertanian”.
Peneliti berharap karya tulis ini dapat memberikan informasi yang bermanfaat dan tambahan pengetahuan bagi para pembaca umumnya serta mahasiswa khususnya. Semoga karya tulis ini dapat menjadi bahan perbandingan dalam periode selanjutnya, dan dapat menjadi suatu karya ilmiah yang baik.
Pada kesempatan ini juga peneliti ingin mengucapkan banyak terima kasih dan penghargaan setinggi-tingginya kepada semua pihak yang telah membantu penulis dalam menyelesaikan penulisan Laporan skripsi ini, antara lain :
- Bapak Ir. Untung Rahardja, M.T.I., selaku Presiden Direktur Perguruan Tinggi Raharja dan Ketua STMIK Raharja.
- Bapak Drs. Po. Abas Sunarya, M.Si., selaku Direktur Perguruan Tinggi Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd., selaku Kepala Jurusan Sistem Komputer Perguruan Tinggi Raharja.
- Bapak Ilamsyah M.Kom., selaku Dosen Pembimbing 1 yang telah memberikan banyak masukan dan motivasi kepada penulis sehingga skripsi ini dapat terselesaikan dengan baik.
- Bapak Abert Tandilintin .MT, selaku Dosen pembimbing 2 yang memberi banyak masukan tentang alat yang peneliti buat.
- Kepada orang tua yang juga memberikan semangat dan do’anya untuk kelancaran SKRIPSI ini.
- Rekan-rekan seperjuangan yang telah memberikan dukungan, serta semangat dalam menyelesaikan Skripsi ini.
- Serta semua pihak yang tidak dapat peneliti sebutkan satu persatu yang telah ikut membantu dalam penyusunan Skripsi ini.
- 1 LEMBAR PENGESAHAN SKRIPSI
- 2 LEMBAR PERSETUJUAN PEMBIMBING
- 3 LEMBAR PERSETUJUAN DEWAN PENGUJI
- 4 LEMBAR KEASLIAN SKRIPSI
- 5 ABSTRAKSI
- 6 ABSTRACT
- 7 KATA PENGANTAR
- 8 DAFTAR GAMBAR
- 9 DAFTAR TABEL
- 10 DAFTAR SIMBOL
- 11 BAB I
- 12 BAB II
- 12.1 Teori Umum
- 12.1.1 Konsep Dasar Sistem
- 12.1.2 Konsep Dasar Sistem Komputer
- 12.1.3 Arsitektur Komputer CISC dan RISC
- 12.1.4 Konsep Dasar Pengontrolan
- 12.1.5 Konsep Dasar Analisa SDLC
- 12.1.6 Konsep Dasar Perancangan Sistem
- 12.1.7 Konsep Dasar Flowchart
- 12.1.8 Konsep Dasar prototype
- 12.1.9 Konsep Dasar Pengujian
- 12.1.10 Konsep Dasar Elisitasi
- 12.2 Teori Khusus
- 12.2.1 Konsep Dasar Mikrokontroller
- 12.2.2 Mikrokontroller Atmega 2560
- 12.2.3 Arduino Mega 2560
- 12.2.4 Operating System Andriod
- 12.2.5 kompenen Elektronika
- 12.2.6 Software Arduino IDE
- 12.2.7 Motor Stepper
- 12.2.8 Teori Dasar Motor DC
- 12.2.9 Konsep Dasar Bluetooth
- 12.2.10 Driver IC L298
- 12.2.11 Konsep Dasar Literature Review
- 12.3 Literature Review
- 12.1 Teori Umum
- 13 BAB III
- 13.1 Gambaran Umum Dinas Pertanian Dan Ketahanan Pangan
- 13.1.1 Sejarah Singkat Dinas Pertanian Dan Ketahanan Pangan
- 13.1.2 Struktur Organisasi perusahaan
- 13.1.3 struktur organisasi dinas Pertanian Dan Ketahanan Pangan
- 13.1.4 Tugas Dan Tanggung Jawab
- 13.1.5 Tujuan Perancangan
- 13.1.6 Langkah-Langkah Perancangan
- 13.1.7 Diagram blok
- 13.1.8 cara Kerja Alat
- 13.1.9 Perancangan
- 13.1.10 Pengkodingan Alat
- 13.1.11 Pengetesan Alat
- 13.1.12 Permasalahan yang di hadapi dan pemecahan masalahnya
- 13.1.13 User Requirement
- 13.1 Gambaran Umum Dinas Pertanian Dan Ketahanan Pangan
- 14 BAB IV
- 15 BAB V
- 16 DAFTAR PUSTAKA
Membangun sebuah sistem baru untuk memperbaharui efisiensi sistem penyiraman yang selama ini digunakan selama ini oleh petani untuk menyemprotkan pestisida ke lahan pertanianya? Apa solusi untuk pembaharuan sistem penyiramnya?
Apa quadcopter dirasa tepat untuk digunakan sebagai media baru untuk menyiram yang baru?
Menerapkan konsep pembuatan Alat yang berhubungan langsung dengan Sistem Komputer dan analisa sebagai sarana pendekatan terhadap pemahaman perangkat keras dan sistem yang berjalan.
Secara fungsional penelitian ini dapat diharapkan dapat bermanfaat dalam membantu meringankan kinerja dan pekerjaan sekaligus dapat memberikan ilmu pengetahuan di bidang teknologi.
Secara individu penelitian ini bertujuan untuk menambah dan mengembangkan pengetahuan dan pengalaman penulis dalam pemecahan masalah sekaligus untuk menyusun laporan SKRIPSI ini sebagai syarat lulus perkuliahan ini.
Perancangan dan penganalisa : Bertugas merancang atau menganalisis sistem baru atau sistem yang sudah ada untuk diperbaiki.
Programmer : Adalah orang yang membuat program sesuai dengan spesifikasi yang di berikan sistem analisa dan design.
Operator : Adalah orang yang menjalankan program.
Teknisi : Adalah orang yang bertugas melakukan perawatan dan perbaikan hardware komputer yang mengalami kerusakan.
Untuk memenuhi kebutuhan pemakai sistem.
Untuk memberikan gambaran yang jelas dan rancang bangun yang lengkap pada pemograman komputer dan ahli-ahli teknik yang terlihat (lebih condong pada disain sistem yang terperinci).
Melakukan evaluasi serta merumuskan pelayanan sistem yang baru secara rinci dan menyeluruh dari masing-masing bentuk informasi yang akan dihasilkan.
Mempelajari dan mengumpulkan data untuk disusun menjadi sebuah struktur data yang teratur sesuai dengan sistem yang akan dibuat yang dapat memberikan kemudahan dalam pemrograman sistem serta keluwesan atau fleksibilitas keluaran informasi yang dihasilkan.
Penyusunan perangkat lunak sistem yang akan berfungsi sebagai sarana pengolahan data dan sekaligus penyaji informasi yang dibutuhkan.
Menyusun kriteria tampilan informasi yang akan dihasilkan secara keseluruhan sehingga dapat memudahkan dalam hal pengindentifikasian, analisis, dan evaluasi terhadap aspek-aspek yang ada dalam permasalahan sistem yang lama.
Penyusunan buku pedoman (manual) tentang pengoperasian perangkat lunak sistem yang akan dilanjutkan dengan pelaksanaan kegiatan pelatihan serta penerapan sistem sehingga sistem tersebut dapat dioperasikan oleh organisasi atau instansi yang bersangkutan.
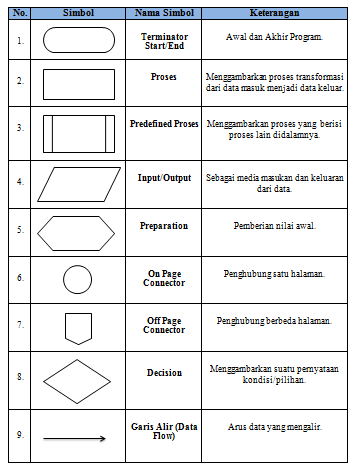
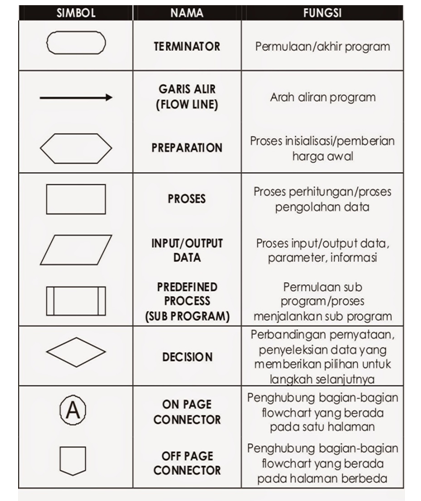
Terminator (start terminator, end terminator): Berbentuk oval sebagai diagram alur yang menunjukkan awal atau akhir proses.
Proses (process): Berbentuk persegi panjang bentuk diagram alur, yang menunjukkan langkah alur proses yang berjalan.
Keputusan (decision): Berbentuk berlian yang menunjukkan bentuk indikasi dari aliran proses yang bercabang.
Konektor (A): Bentuk lingkaran pada diagram alir yang digunakan untuk menunjukkan lonjakan aliran proses.
Data : Sebuah jajaran genjang yang menunjukkan input data atau output (I / O) dalam proses.
Dokumen (document) : Digunakan untuk menunjukkan dokumen atau laporan.
Flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dapat dimengerti oleh pembacanya.
Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas.
Setiap langkah dari aktivitas harus diuraikan dengan menggunakan deskripsi kata kerja.
Setiap langkah dari aktifitas harus berada pada urutan yang benar.
Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
Gunakan simbol-simbol flowchart yang standar.
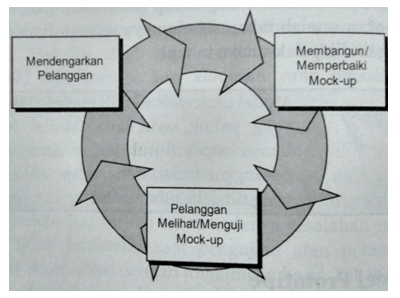
Mengidentifikasi kebutuhan pengguna. Pengembang mewawancarai pengguna untuk mendapatkan ide mengenai apa yang diminta dari sistem.
Membuat satu prototipe. Pengembang mempergunakan satu alat prototyping atau lebih untuk membuat prototipe. Contoh dari alat-alat prototyping adalah generator aplikasi terintegrasi dan toolkit prototyping. Generator aplikasi terintegrasi (integrated application generator) adalah sistem peranti lunak siap pakai yang mampu membuat seluruh fitur yang diinginkan dari sistem baru—menu, laporan, tampilan, basis data, dan seterusnya. Toolkit prototyping meliputi sistem-sistem peranti lunak terpisah, seperti spreadsheet elektronik atau sistem manajemen basis data, yang masing-masing mampu membuat sebagian dari fitur-fitur sistem yang diinginkan.
Menentukan apakan prototipe dapat diterima mendemontrasikan prototipe kepada para pengguna untuk mengetahui apakah telah memberikan hasil yang memuaskan, jika sudah, langkah emapat akan diambil; jika tidak, prototipe direvisi dengan mengulang kembali langkah satu, dua, dan tiga dengan pemahaman yang lebih baik mengenai kebutuhan pengguna.
Menggunakan prototipe, prototipe menjadi sistem produksi.
Causes (kondisi input), dan Effects (aksi) didaftarkan untuk modul dan identifier yang dtujukan untuk masing-masing.
Pembuatan grafik Causes-Effect graph.
Grafik dikonversikan kedalam tabel keputusan.
Aturan tabel keputusan dikonversikan kedalam kasus uji.
VCC merupakan pin yang digunakan sebagai masukan sumber tegangan.
GND merupakan pin untuk Ground.
XTAL1/ XTAL2, XTAL digunakan sebagai pin external clock.
Port A, B, C ,D, E, H,J dan L merupakan 8 bit port I/O dengan internal pull-up resistor. Port G merupakan 6 bit port I/O dengan internal pull-up resistor.
Port F (PF0:PF7) dan Port K (PK0:PK7) merupakan pin I/O dan merupakan pin masukan ADC.
AVCC adalah pin masukan untuk tegangan ADC.
AREF adalah pin masukan untuk tegangan referensi eksternal ADC.
VIN : Adalah input tegangan untuk papan Arduino ketika menggunakan sumber daya eksternal (sebagai ‘saingan’ tegangan 5 Volt dari koneksi USB atau sumber daya ter-regulator lainnya). Anda dapat memberikan tegangan melalui pin ini, atau jika memasok tegangan untuk papan melalui jack power, kita bisa mengakses/mengambil tegangan melalui pin ini.
5V : Sebuah pin yang mengeluarkan tegangan ter-regulator 5 Volt, dari pin ini tegangan sudah diatur (ter-regulator) dari regulator yang tersedia (built-in) pada papan. Arduino dapat diaktifkan dengan sumber daya baik berasal dari jack power DC (7-12 Volt), konektor USB (5 Volt), atau pin VIN pada board (7-12 Volt). Memberikan tegangan melalui pin 5V atau 3.3V secara langsung tanpa melewati regulator dapat merusak papan Arduino.
3v3 : Sebuah pin yang menghasilkan tegangan 3,3 Volt. Tegangan ini dihasilkan oleh regulator yang terdapat pada papan (on-board). Arus maksimum yang dihasilkan adalah 50 mA.
IOREF : Pin ini pada papan Arduino berfungsi untuk memberikan referensi tegangan yang beroperasi pada mikrokontroler. Sebuah perisai (shield) dikonfigurasi dengan benar untuk dapat membaca pin tegangan IOREF dan memilih sumber daya yang tepat atau mengaktifkan penerjemah tegangan.
(voltage translator) pada output untuk bekerja pada tegangan 5 Volt atau 3,3 Volt.
GND. Pin Ground atau Massa
Kerangka aplikasi: itu memungkinkan penggunaan dan penghapusan komponen yang tersedia.
Dalvik mesin virtual: mesin virtual dioptimalkan untuk perangkat telepon seluler.
Grafik: grafik di 2D dan grafis 3D berdasarkan pustaka OpenGL.
SQLite: untuk penyimpanan data.
Mendukung media: audio, video, dan berbagai format gambar (MPEG4, H.264, MP3, AAC, AMR, JPG, PNG, GIF)
GSM, Bluetooth, EDGE, 3G, 4G dan WiFi (tergantung piranti keras)
Kamera, Global Positioning System (GPS), kompas, NFC dan accelerometer (tergantung piranti keras)
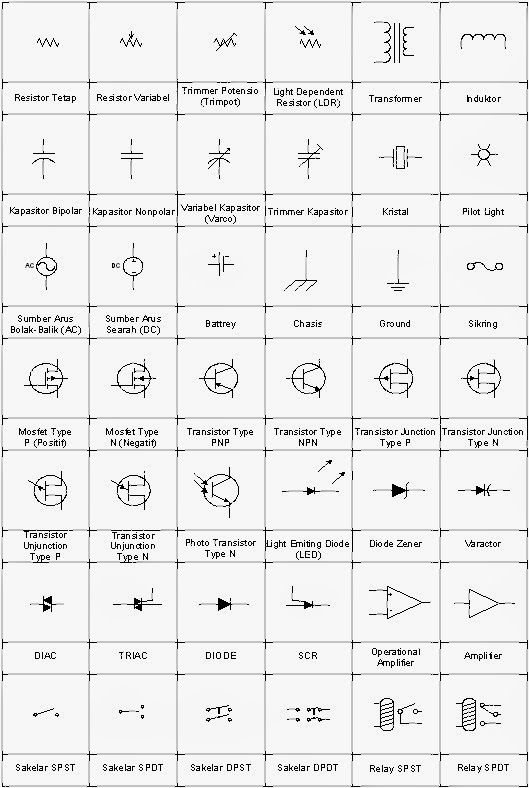
Resistor tetap
Penjelasan tentang resistor :
Regulasi dengan IC regulator
Fungsi Lampu Led
Kumparan (Koil)
Input Relay
Common Relay
Normally Closed (NC)
Normally Open (NO)
Single Pole Single Throw (SPST), relay ini memiliki 4 terminal yaitu 2 terminal untuk input kumparan elektromagnet dan 2 terminal saklar. Relay ini hanya memiliki posisi NO (Normally Open) saja.
Single Pole Double Throw (SPDT), relay ini memiliki 5 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 3 terminal saklar. relay jenis ini memiliki 2 kondisi NO dan NC.
Double Pole Single Throw (DPST), relay jenis ini memiliki 6 terminal yaitu terdiri dari 2 terminal untuk input kumparan elektromagnetik dan 4 terminal saklar untuk 2 saklar yang masing-masing saklar hanya memilki kondisi NO saja.
Double Pole Double Throw (DPDT), relay jenis ini memiliki 8 terminal yang terdiri dari 2 terminal untuk kumparan elektromagnetik dan 6 terminal untuk 2 saklar dengan 2 kondisi NC dan NO untuk masing-masing saklarnya.
Edit program, sebuah modul yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing.
Compiler, sebuah modul yang mengubah kode program (bahasa processing) menjadi kode biner.
Uploder, sebuh modul yang memuat kode biner dari computer ke dalam memori di dalam Arduino Board.
Motor DC 1 "+" atau stepper motor A +
Motor DC 1 "-" atau stepper motor A-
12V jumper
Hubungkan tegangan suplai motor Anda di sini, maksimum 35V DC.
GND
5V output
Motor DC 1 terhubung ke output PWM untuk kontrol kecepatan motor DC.
IN1
IN2
IN3
IN4
Motor DC 2 terhubung ke output PWM untuk kontrol kecepatan motor DC.
Motor DC 2 "+" atau stepper motor B +
Motor DC 2 "-" atau stepper motor B -
Dinas Ketahanan Pangan, Pertanian dan Perikanan dalam melaksanakan tugas sebagaimana dimaksud menyelenggarakan kewenangan:
Penyediaan infrastruktur dan seluruh pendukung kemandirian pangan pada berbagai sektor sesuai kewenangan daerah;
Penyediaan dan penyaluran pangan pokok atau pangan lainnya sesuai kebutuhan daerah dalam rangka stabilisasi pasokan dan harga pangan
Pengelolaan cadangan pangan kota
Penentuan harga minimum daerah untuk pangan lokal yang tidak ditetapkan oleh Pemerintah Pusat dan Pemerintah Daerah Provinsi;
Pelaksanaan pencapaian target konsumsi pangan perkapita/tahun sesuai dengan angka kecukupan gizi;
Penyusunan peta kerentanan dan ketahanan pangan kecamatan
Penanganan kerawanan pangan kota;
Pengadaan, pengelolaan dan penyaluran cadangan pangan pada kerawanan pangan yang mencakup dalam Daerah;
Pengawasan keamanan pangan segar
Pengawasan penggunaan sarana pertanian
Pengelolaan sumber daya genetik (SDG) hewan dalam Daerah
Pengawasan mutu dan peredaran benih/bibit ternak dan tanaman pakan ternak serta pakan dalam Daerah
Pengawasan obat hewan di tingkat pengecer
Pengendalian penyediaan dan peredaran benih/bibit ternak dan hijauan pakan ternak dalam Daerah
Penyediaan benih/bibit ternak dan hijauan pakan ternak yang sumbernya dalam 1 (satu) provinsi
Kepala Dinas
sekertaris
Kepala Sub Bagian umum dan kepegawaian
kepala sub bagian Keuangan
kepala sub bagian Perancangan
bidang pertanian dan peternakan
Seksi Pertanian
seksi peternakan
Seksi Pasca Panen Pertanian dan Peternakan
Bidang Ketersediaan Dan Distribusi pangan
Seksi Ketersediaan dan Kerawanan Pangan
Seksi Distribusi Pangan
Bidang Perikanan
seksi Perikanan Budidaya
seksi Penguatan Daya Saing Produk Perikanan
Bidang Konsumsi dan Keamanan Pangan
Seksi Keamanan Pangan
Tujuan perancangan dibuatnya quadcopter ini ialah di samping untuk mengikuti perkembangan zaman teknologi saat ini alat ini juga dapat berguna juga sebagai media untuk meringankan pekerjaan para petani dikarenakan quadcopter berguna seabgai alat penyiraman pestisida suatu bahan kimia yang digunakan untuk membunuh hama hama yang dapat merugikan para petani.
Dan kenapa penulis memilih quadcopter sebagai media penyiramanya di karenakan quadcopter itu sendiri dapat di terbangkan melalui remote control dari jarak jauh jadi para petani tidak perlu repot repot untuk berjalan mengitari sawahnya apalagi jika petani itu memiliki sawah yang cukup luas.
Langkah-Langkah Perancangan.
Dengan menurut yang terdapat di bab 1, disini penulis menggunakan metode perancangan evolutionary. Metode ini di pilih di karenakan menurut penulis sangat lah cocok untuk perancangan alat, karena penulis mengembangkan dari alat alat yg sudah ada dari berupa motor dc, frame, baling baling, ESC dan menyambungkanya dengan arduino sebagai pengganti Flight Control Boardnya atau biasa yg di sebut itu dengan Arducopter.
Remote tx/rx merupakan komponen yang di gunakan sebagai pengirim sinyal dan sebagai pengendali untuk menerbangkan si quadcopter itu sendiri.
Receiver merupakan komponen penerima sinyal dari pengendali tersebut.
Flight controller sebuah komponen yang menjadi si otak atau pengatur logika dari motor dc atau baling satu dengan ketiga baling balingnya.
ESC (Electronic Speed controller) sebuah komponen yang bertugas sebagai pemroses sinyal dan pengatur kecepatan dan putaran si motor dc.
Motor dc adalah komponen yang berfungsi untuk memutar baling baling untuk menerbangkan quadcopter ini.
Handphone berfungsi untuk mengirimkan pesan text kepada modul gsm.
Modul gsm berfungsi untuk menerima pesan text dan memberikan kepada arduino uno utntuk diolah menjadi suatu perintah.
Arduino uno untuk mengolah perintah dan menjadikanya suatu hasil dari perintah tersebut,
Motor dc komponen ini berguna untuk membuka dan menutup katup nozzle itu sendiri.
Nozzle penyemprot berfungsi sebagai lubang penyemprot pestisida tersebut.
- Sistem Input
- Sistem Proses
- Sistem Output
- Arduino uno
- Propeller (baling baling)
- ESC (Electronic Speed Controller)
- Remote Controller flysky i6
- Frame quadcopter FY 450
- Modul Gsm
- Software (perangkat lunak)
- Software IDE
- Software fritzing
-
mengkoreksi tiap tiap bagian komponen sudah bekerja dengan seharusnya dan sesuai dengan yang di inginkan melakukan tugasnya
-
melakukan pengecekan apakah sistem penyiraman sudah bekerja dengan baik dan menggapai semua area.
-
dapat memberikan integrasi antara komponen quadcopter dan komponen penyiramanya.
-
menstabilkan bagaimana quadcopter itu terbang
-
Permasalahan yang Dihadapi
-
Membangun sebuah sistem baru untuk memperbaharui efisiensi sistem penyiraman yang selama ini digunakan selama ini oleh petani untuk menyemprotkan pestisida ke lahan pertanianya? Apa solusi untuk pembaharuan sistem penyiramnya?
-
Apa quadcopter dirasa tepat untuk digunakan sebagai media baru untuk menyiram yang baru?
-
Alternative pemecahan masalah
-
Dibuatlah suatu sistem yang baru dengan menggunakan tenaga quadcopter yang sudah di integrasikan dengan arduino untuk memberikan sistem yag selama ini digunakan untuk hanya dega cara manual degan alat ini dibuat secara otomatis da dapat mejangkau wilayah yang cukup lumaya luas yaitu sejauh 1,5 km dan dengan mengirim sms kita dapat untuk memulai dan menyudahi penyiramanya tersebut.
-
Cukup efisiensi sistem yang baru ini menggunakan quadcopter ini dikarenakan si pengguna tidak perlu lagi mengitari lahan pertanianya untuk melakukan penyiramanya.
-
Remote controller memberikan sinyal kepada receiver.
-
Lalu memutar motor dc untuk dapat menerbangkan quadcopter
-
lalu dengan mengirim sms melalui handphone kita dapat mengaktifkan penyiramanya.
-
2 (dua) simbol terminal, yang berperan sebagai “start” dan “finish”
-
6 (enam) simbol yang menyatakan proses input dan output yaitu menggerakan stick remote control, flight controller mengatur antara motor 1 dan ke 4 motor lainya, dan keluaran perputaran motor tersebut.
-
5 (lima) Proses yang menyatakan proses yang berlangsung, yaitu menerima sinyal dari remote controller, ESC mengatur percepatan yang di inginkan sesuai perintah dari remote.
-
2(dua) simbol terminal, yang berperan sebagai “start” dan “finish”
-
3(tiga) simbol yang menyatakan proses input dan output yaitu handphone mengirim sms, modul gsm menerima sms dan motor menghasilkan keluaran mengeluarkan air
-
1(satu) Proses yang menyatakan proses yang berlangsung, yaitu arduino mengolah perintah yang telah diperintahkan
- include "SIM900.h"
- include "sms.h"
- include "SoftwareSerial.h"
- include "sms.h"
-
motor dc 1000kv
-
esc hobbywing 30A
-
frame quadcopter 450
-
arduino uno
-
gsm module
-
motor dc
-
nozzle penyemprot
-
propeller 10 cm
-
battery lipo 3 cell
-
remote flyskyi6
-
Spesifikasi Software
-
software Arduino ide
-
fritzing
-
google chrome
-
Mengumpulkan Data.
-
Perancangan Sistem
-
Pengujian sistem
-
Perbaikan Sistem
-
Training User.
-
Implementasi Sistem
-
Dokumentasi sistem
- ↑ Eka Pratama, I Putu. 2014.Bandung: Informatika Bandung
- ↑ Rusdiana, Irfan. 2014. Bandung: Pustaka Setia.
- ↑ Wikipedia. Sistem Komputer. (Diakses Tanggal 29 November 2016)
- ↑ 4,0 4,1 4,2 4,3 Toibah Umi Kalsum, Siswanto. 2012. Jurnal Media Infotama Vol. 8 No. 1 Februari 2012
- ↑ Wikipedia. Arsitektur Komputer. (Diakses Tanggal 29 November 2016).
- ↑ Wikipedia. CISC. (Diakses Tanggal 29 November 2016).
- ↑ Wikipedia. RISC. (Diakses Tanggal 29 November 2016).
- ↑ 8,0 8,1 8,2 Erinofiardi, Nurul Iman Supardi, Redi. 2012. Penggunaan PLC Dalam Pengontrolan Temperatur, Simulasi Pada Prototype Ruangan. Jurnal Mekanikal, Vol.3No.2 – Juli 2012.
- ↑ 9,0 9,1 Rosa A.S, M.shalahuddin. 2016. Rekayasa Perangkat Lunak Terstruktur dan Berorientasi Objek. Bandung: INFORMATIKA.
- ↑ 10,0 10,1 Seema, Sona Malhotra. 2012. Analysis and tabular comparison of popular SDLC models. International Journal Of Advances In Computing And Information Technology (IPAJOURNALS 2012)
- ↑ 11,0 11,1 11,2 Darmawan, Nur Fauzi. 2013. Sistem Informasi Manajemen. Bandung: PT.Remaja ROSDA KARYA
- ↑ Subhan, Mohammad. 2012. Analisa Perancangan Sistem. Jakarta : Lentera Ilmu Cendekia.
- ↑ Sutabri, Tata. 2012.Yogyakarta: CV. Andi Offset.
- ↑ Iswandi, Eka. 2015. Sistem Penunjang Keputusan Untuk Menentukan Penerimaan Dana Santunan Sosial Anak Nagari Dan Penyalurannya Bagi Mahasiswa Dan Pelajar Kurang Mampu Di Kenagarian Barung – Barung Balantai Timur. Jurnal tekno Vol 3, No 2. Hal 70-79. Oktober 2015.
- ↑ Adelia, dan Jimmy Setiawan. 2011. Implementasi Customer Relationship Management (CRM) pada Sistem Reservasi Hotel berbasisi Website dan Desktop. Bandung: Universitas Kristen Maranatha. Vol. 6, No. 2, September 2011 :113-126.
- ↑ Sulindawati, dan Muhammad Fathoni. 2010. Pengantar Analisa Perancangan Sistem. Medan: STMIK Triguna Dharma. Vol. 9, No. 2, Agustus 2010.
- ↑ Tri, S. 2015. Analisis dan Perancangan Sistem. Universitas Gunadarma.
- ↑ Dewi Rosmala , M. Djalu Djatmiko, Budiman Julianto. 2012. Implementasi Aplikasi Website E-Commerce Batik Sunda Dengan Menggunakan Protokol Secure Socket Layer (Ssl). JURNAL INFORMATIKA No.3 , Vol. 3, September – Desember 2012
- ↑ 19,0 19,1 Simarmata, Janner. 2010. Rekayasa Perangkat Lunak. Yogyakarta: ANDI.
- ↑ Rizky. 2011. Konsep Dasar Rekayasa Perangkat Lunak. Jakarta: PT Prestasi Pustakaraya.
- ↑ Warsito, Ary Budi, Muhammad Yusup, Moh Iqbal. 2015. Perancangan SIS+ Menggunakan Metode YII Framework Pada Perguruan Tinggi Raharja. Vol.8 No.2 – Januari 2015.
- ↑ Srinivas, Nidhra. Jagruthi, Dondeti. 2012.Black Box And White Testing Techniqeus a Literature Review. International Journal of Embedded Systems and Applications ( IJESA, Vol.2, No.2, 2012)
- ↑ Archarya,Shivani. Pandya, Vidhi. 2013. Bridge between Black Box and White Box – Gray Box Testing Technique. Internasional Journal of Electronics and Computer Science Engineering. ISSN- 2277-1956 Volume 2 No.1
- ↑ Masooma Yousuf dan M.asger. 2015. “Comparison of Various Requirements Elicitation Techniques. International Jurnal Of Computer applications (0975-8887 Vol.116 No.4, April 2015)
- ↑ Siahaan, Daniel. 2012. Analisa Kebutuhan dalam Rekayasa Perangkat Lunak. Yogyakarta: CV. Andi Offset.
- ↑ 26,0 26,1 26,2 26,3 Guritno, Suryo, Sudaryono Dan Untung Rahardja. 2011.Theory And Application Of IT Research Metodologi Penelitian Teknologi Informasi. Yogyakarta: CV. Andi Offset.
- ↑ Syahwil, Muhammad. 2013.Panduan Mudah Simulasi Dan Praktik Mikrokontroler Arduino.Yogyakarta:CV. Andi Offset.
- ↑ Santoso, Martinus, dan Sugiyanto. 2013. Pembuatan Otomasi Pengaturan Kereta Api, Pengereman, Dan Palang Pintu Pada Rel Kereta Api Mainan Berbasis Mikrokontroler. Jurnal FEMA Vol. 1, No. 1, Januari 2013.
- ↑ 29,0 29,1 Jauhari Arifin , Leni Natalia Zulita, Hermawansyah. 2016. Perancangangan Murottal Otomatis Menggunakan Mikrokontroller Arduino Mega 2560. Jurnal media Infotama Vol. 12 no 1 Februari 2016.
- ↑ Wahadyo, Agus. 2013. Android 4 Untuk Pengguna Pemula Tablet & Handphone. 2013. TransMedia : Jakarta.
- ↑ Safaat, Nasruddin.2012.Pemrograman aplikasi mobile smartphone dan tablet PC berbasis Android
- ↑ Iskandar Jaelani, Sherwin R.U.A. Sompie ST.,MT, dan Dringhuzen J. Mamahit ST., M.Eg. 2016. Rancang Bangun Rumah Pintar Otomatis Berbasis Sensor Suhu, Sensor Cahaya, Dan Sensor Hujan. Jurnal Teknik Elektro dan Komputer vol. 5 no. 1, Januari – Maret 2016.
- ↑ Alfith. 2015. Rancangan Traffic Light Berbasis Mikrokontroler Atmega16. Jurnal Momentum. (ISSN: 1693-752X) Vol. 17, No. 1. 2015.
- ↑ Wikipedia. Dioda Zener. https://id.wikipedia.org/wiki/Dioda_Zener. (Diakses Tanggal 1 Desember 2016).
- ↑ Miller, Rex. 2013. .Industrial Electricity and Motor Controls. USA: Mc Graw Hill Education.
- ↑ Djunadi, Feri. 2011. Pengenalan Arduino. E-Book. Diakses di: www.tokobuku.com
- ↑ 37,0 37,1 Syahrul. 2014. Pemograman Mikrokontroller AVR bahasa Assembly dan C. Bandung: Informatika
- ↑ Nikhil, Tripatih, Rameshwar, Singh, Renu, yadav. 2015. Analysis of Speed Control of DC Motor –A review study International Research. Journal of Engineering and Technology(Vol.02, Issue.08, 2015).
- ↑ 39,0 39,1 Susaptoyono, Yogyo. 2012.Bluetooth. Yogyakarta: CV.Andi Offset Winarno, dan Deni Arifianto.2011.Bikin Robot itu Gampang. Jakarta Selatan: PT Kawan Pustaka.
Terima kasih yang setinggi-tingginya kepada Bapak dan Ibu, adik dan keluarga tercinta yang telah memberikan dukungan baik moril maupun materil dan tentunya Do’a restu yang tiada henti.
Akhir kata, Semoga Allah SWT memberikan balasan rahmat kepada semua pihak yang telah membantu penulis dalam pembuatan Laporan SKRIPSI ini.
Demikian, peneliti sampaikan dengan harapan semoga Laporan SKRIPSI ini dapat berguna dan bermanfaat bagi semua pihak
| Tangerang, Januari 2017 | |
| Indri Setiawan | |
| NIM. 1233473350 |
Daftar isi
DAFTAR GAMBAR
DAFTAR GAMBAR
DAFTAR TABEL
DAFTAR TABEL
DAFTAR SIMBOL
DAFTAR SIMBOL
SIMBOL FLOWCHART ( DIAGRAM ALIR )
SIMBOL ELEKTRONIKA
BAB I
Latar Belakang
Pada saat ini perkembangan teknologi sangat lah cepat. Kemajuan teknologi komputer sangatlah mendukung dalam hal pengolahan data untuk membuat sesuatu sistem informasi yang di gunakan agar memberikan suatu hasil kerja yang maksimal. Penggunaan komputer dalam sistem informasi tidak terlepas dari penggunaan hardware dan system informasi yang di gunakan agar memberikan suatu hasil kerja yang maksimal. Penggunaan komputer dalam sebuah sistem informasi tidak terlepas dari penggunaan hardware dan software serta brainware yang handal dalam menjalankan sistem agar dapat bekerja dengan optimal dan sesusai dengan kebutuhan. Apalagi di zaman modern sekarang ini, dimana semua sudah serba instan dan canggih, dikarenakan tuntutan hidup yang terjadi semua manusia ingin semuanya serba praktis dan serba instan, dan di era modern seperti ini kemajuan pada pola pemikiran manusia seperti sekarang sudah banyak penemuan penemuan yang sangat Kreatif dan Inovatif, bagaimana tidak dalam satu harinya saja sudah ada hampir 1 sampai 5 alat dan penemuanya yang di ciptakan setiap harinya. Dan untuk mengikuti persaingan dan persaingan yang ada di masyarakat dan sebagai mahasiswa Perguruan Tinggi Raharja kita di tuntut untuk memberikan inovasi penemuan yang dapat membantu kehidupan manusia saat ini.
Dan permasalahan yang penulis temukan disini ialah kemajuan teknologi di bidang pertanian ini masih jarang sekali terjamah oleh kemajuan teknlogi di sebabkan karena masih banyak yang berpikir untuk tetap menggunakan cara tradisional, dan mereka berpikir cara tradisional lah yang paling efektif untuk digunakan, oleh karena itu penulis ingin memberikan suatu solusi yang dapat membantu meringankan pekerjaan mereka, dengan membuat sebuah quadcopter yang sudah terintegrasi dengan sebuah microcontroller Arduino untuk sebagai mekanikal penyiramnya agar penyiramanya itu bisa berfungsi secara otomatis dengan modul GSM sebagai switch on/off untuk menyalakan dan mematikan penyiramanya dan itulah mengapa alasan penulis memilih judul penulisan yaitu “Alat penyiram pestisida menggunakan quadcopter pada Dinas Pertanian”, disamping sebagai suatu syarat lulus skripsi ini dan supaya bisa membantu perusahaan atau instansi yang saya lakukan penelitian dan mengikuti persaingan yang ada dan menaikan standar kualitas diri di dalam masyarakat sekarang ini.
Dan Dinas Pertanian ini adalah suatu lembaga yang berasal dari pemerintah yang bertujuan untuk memberikan pelayanan di dalam mengurus, merumuskan, melaksanakan kebijakan operasional, pembinaan, pengaturan dan fasilitasi pengembangan dan pengelolaan prasarana dan sarana pertanian dan tanaman pangan. Dan oleh sebab itu Dinas Pertanian ini saya pilih sebagai tempat untuk meng-implementasikan alat saya ini dan dan pada dinas dapat memberikan sarana dan fasilitas kepada penulis membuat suatu inovasi di dalam kalangan masyarakat yang berprofesi di bidang pertanian ini supaya masyarakat bisa lebih mengetahui kemajuan teknologi.
Perumusan Masalah
Berdasarkan uraian di atas maka dapat ditarik pokok permasalahan yaitu :
Ruang Lingkup
Sesuai dengan judul diatas, maka penulis membatasi ruang lingkup penelitian hanya pada proses bagaimana sistem penyiraman pestisida yang selama ini digunakan dan bagaimana penyiraman yang di lakukan petani setiap harinya dan bagaimana sistem atau prosedur cara kerja penyiraman pestisida tersebut. Dan penulis membatasi ruang lingkup penelitian untuk mencari dari efesiensi apakah quadcopter tersebut mampu untuk membawa beban 0,5 liter pestisida dan dapat menjangkau luas wilayah yang diperlukan para petani tersebut.
Hipotesis
Hipotesis disini penulis melihat dari hasil observasi ini bagaimana setiap harinya petani harus melakukan secara manual penyiramanya pestisida oleh sebab itu penulis ingin memberikan suatu kemudahan dalam suatu pekerjan para petani setiap harinya dengan memanfaatan suatu pembaharuan teknlogi sekarang ini maka dari itu dibuatlah quadcopter yang sudah di kombinasikan dengan arduino ini supaya alat ini dapat menyemprotkan cairan pestisida ini secara otomatis dan dapat mencakup setiap wilayah tanpa harus berjalan mengitari sawahnya lagi, Dan materi saya ini masih banyak perlu pembuktian dan factor yang mendukung rancangan sistem yang akan saya buat ini.
Tujuan dan Manfaat Penelitian
Tujuan
Adapun tujuan dari penulisan laporan SKRIPSI ini adalah :
1. Tujuan Operasional
2. Tujuan fungsional
3. Tujuan Individual
Manfaat
Adapun manfaat yang diharapkan dan diperoleh dari laporan ini adalah :
1. Bagi Dinas Pertanian
Hasil laporan dan alat ini diharapkan dapat memberikan suatu inovasi yang dapat berguna sebagai metode dan ilmu pengetahuan dalam kelangsungan kedepanya
2. Bagi pengguna
Dapat memberikan ilmu pengetahuan terbaru dalam kemajuan teknologi dan berguna untuk meringankan pekerjaan si pengguna.
3. Bagi Penulis
Menambah pengetahuan dan pengalaman khususnya dalam membuat suatu alat yang membantu dalam penyiraman pestisida yang sebelumnya baru sedikit sekali di implementasikan di sini.
Metode Penelitian
Metode Analisa
Dan untuk metode analisa ini penulis menggunakan Elisitasi dalam menganalisa kebutuhan yaitu Elisitasi tahap 1, tahap 2, tahap 3, final Elisitasi.
Metode Perancangan
Perancangan alat yg penulis buat disini adalah penulis membuat suatu quadcopter yg bertugas untuk membawa sebuah tabung yang berisikan air pembasmi hama atau biasa disebut pestisida lalu menyiramkanya ke semua permukaan sawah dan saya menggunakan arduino untuk mikrokontroller-nya dan sekaligus pengatur penyiramanya tersebut.
Metode Prototipe
pada metode prototipe ini penulis menggunakan metode prototyping Evolutionary dikarenakan saya sebagai penulis membuat alat ini berdasarkan satu persatu komponen yg sudah terlebih dahulu ada dan menjadi suatu kesatuan alat yg utuh.
Metode Prototype
Prototyping adalah proses pembuatan model sederhana software yang mengizinkan pengguna memiliki gambaran dasar tentang program serta melakukan pengujian awal. Prototyping memberikan fasilitas bagi pengembang dan pemakai untuk saling berinteraksi selama proses pembuatan, sehingga pengembang dapat dengan mudah memodelkan perangkat yang akan dibuat.
Peneliti menerapkan prototype dengan menggunakan evolutionary karena pada metode ini, hasil prototype tidak langsung dibuang tetapi digunakan untuk iterasi desain berikutnya. Dalam hal ini, sistem atau produk yang sebenarnya dipandang sebagai evolusi dari versi awal yang sangat terbatas menuju produk final atau produk akhir.
Metode Pengujian
Pada metode pengujian ini penulis menggunakan metode blackbox dikarenakan penulis berpikir metode ini yang dikira paling tepat berfokus langsung kepada fungsional dan kepada perangkat lunak teersebut
Sistematika Penulisan
Untuk mempermudah dan memahami lebih jelas dalam pembahasan masalah pada laporan ini, maka materi-materi yang tertera pada SKRIPSI ini dikelompokkan menjadi beberapa sub-sub dengan sistematika penyampaian sebagai berikut :
BAB I PENDAHULUAN
Bab ini menjelaskan tentang informasi umum yaitu latar belakang, rumusan masalah, tujuan dan manfaat penelitian, ruang lingkup penelitian, metode penelitian, dan sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini akan disajikan teori yang relevan, lengkap dan sejalan dengan permasalahan yang diteliti. Teori yang dikemukakan berasal dari sumber-sumber teori dan dari hasil penelitian.
BAB III PEMBAHASAN
Pada bab ini terdiri atas pembahasan secara umum yang meliputi sejarah berdirinya Dinas Pertanian ini , struktur organisasi, pembahasan tugas dan wewenang, Analisa Sistem Berjalan.
BAB IV UJI COBA DAN ANALISA
Pada bab ini berisi atas perancangan , Uji coba dan analisa dalam sistem yang telah dibuat, Pada bab ini juga berisikan uji coba sistem, Metode Perancangan, Analisa yang berisikan flowchart sistem yang di usulkan, implementasi, penerapan Dan estimasi biaya.
BAB V PENUTUP
Bab ini berisi kesimpulan dan saran yang berkaitan dengan analisa dan pembuatan alat yang telah diuraikan pada bab-bab sebelumnya.
DAFTAR PUSTAKA
LAMPIRAN-LAMPIRAN
BAB II
Teori Umum
Konsep Dasar Sistem
1. Konsep Dasar Sistem
Suatu konsep dasar sistem sangat diperlukan sebelum melakukan perancangan sistem.Untuk itu sebaiknya kita mengetahui konsep dasar sistem terlebih dahulu.Di mana pada definisi sistem terdapat 2 kelompok pendekatan dalam mendefinisikan sistem, yaitu dengan menekankan pada prosedurnya dan menekankan pada elemennya.
2. Definisi Sistem
Menurut Pratama (2014:7)[1]“Sistem didefinisikan sekumpulan prosedur yang saling berkaitan dan saling terhubung untuk melakukan suatu tugas bersama-sama”, Secara garis besar, sebuah sistem informasi terdiri dari atas tiga komponen utama. Ketiga komponen tersebut mencakup Software, hardware dan Brainware. Ketiga komponen ini saling berkaitan Satu sama lain..
Menurut Eddy (2014:78), ”Sistem didefinisikan sebagai sekumpulan objek, ide, berikut keterkaitan di dalam mencapai tujuan.” Berdasarkan definisi di atas dapat di simpulkan bahwa defini sistem ialah suatu sekumpulan objek atau data yang saling berkaitan satu sama lain untuk mencapai suatu tujuan atau hasil pekerjaan tersebut.
3. Karakteristik Sistem
Secara garis besar, Sebuah sistem informasi terdiri atas tiga kompenen utama. Ketiga kompenen tersebut mencangkup software, hardware, dan brainware. Ketiga kompenen ini saling berkaitan satu sama lain.
Menurut Sutabri (2012:20), sebuah sistem mempunyai karakteristik atau sifat-sifat tertentu yang mencirikan bahwa hal tersebut bisa dikatakan sebagai suatu sistem. Adapun karakteristik yang dimaksud adalah sebagai berikut :
a. Komponen Sistem (Components)
Suatu sistem terdiri dari sejumlah komponen yang saling berinteraksi, yang artinya saling bekerja sama membentuk satu kesatuan. Komponen-komponen sistem tersebut dapat berupa suatu subsistem. Setiap subsistem memiliki sifat dari sistem yang menjalankan suatu fungsi tertentu mempengaruhi proses sistem secara keseluruhan. Suatu sistem dapat mempunyai sistem yang lebih besar atau sering disebut “supra sistem”.
b. Batasan Sistem (Boundary)
Ruang lingkup sistem yang merupakan daerah yang membatasi antara sistem dengan sistem yang lain atau sistem dengan lingkungan luarnya. Batasan sistem ini memungkinkan suatu sistem dipandang sebagai satu kesatuan yang tidak dapat dipisahkan.
c. Lingkungan Luar Sistem (Evinronment)
Bentuk apapun yang ada diluar ruang lingkup atau batasan sistem yang mempengaruhi operasi sistem tersebut disebut lingkungan luar.Lingkungan luar sistem ini dapat bersifat menguntungkan dan dapat juga bersifat merugikan sistem tersebut.Dengan demikian, lingkungan luar tersebut harus tetap dijaga dan dipelihara.Lingkungan luar yang merugikan harus dikendalikan. Kalau tidak, maka akan mengganggu kalangsungan hidup dari sistem tersebut.
d. Penghubung Sistem (Interface)
Media yang menghubung sistem dengan subsistem yang lainya disebut penghubung sistem. Penghubung ini memungkinkan sumber-sumber daya mengalir dari satu subsistem ke subsistem yang lain. Bentuk keluaran dari satu subsistem akan menjadi masukan untuk subsistem lain melalui penghubung tersebut. Dengan demikian, dapat terjadi suatu integrasi sistem yang membentuk satu kesatuan.
e. Masukan Sistem (Input)
Energi yang dimasukan kedalam sistem, yang dapat berupa pemeliharaan ( maintenance input) dan sinyal (signal input). Contoh, didalam suatu unit sistem komputer, “program” adalah maintenance input yang digunakan untuk
mengoperasikan komputernya dan “data” adalah signal input untuk diolah menjadi informasi.
f. Keluaran Sistem (Output)
Hasil dari energi yang diolah dan diklasifikasikan menjadi keluaran yang berguna. Keluaran ini merupakan masukan bagi subsistem yang lain seperti informasi. Keluaran yang dihasilkan adalah informasi. Informasi ini dapat digunakan sebagai masukan untuk pengambilan keputusan atau hal-hal lain yang menjadi input bagi subsitem lain.
g. Pengolahan Sistem (Process)
Suatu sistem dapat mempunyai suatu proses yang akan mengubah masukan menjadi keluaran, contohnya adalah sistem akuntansi. Sistem ini akan mengolah data transaksi menjadi laporan-laporan yang dibutuhkan oleh pihak manajemen.
h. Sasaran Sistem (Objective)
Suatu sistem memiliki tujuan dan sasaran yang pasti dan bersifat deterministic.Jika suatu sistem tidak memiliki sasaran maka operasi sistem tidak ada gunanya.Suatu sistem dikatakan berhasil bila mengenai sasaran atau tujuan yang telah direncanakan.
4. Klasifikasi Sistem
Menurut Taufiq (2013:8), sistem dapat diklasifikasikan dari beberapa sudut pandang, diantaranya :
a. Sistem Abstrak dan Sistem Fisik
Jika dilihat dari bentuknya sistem bisa dibagi menjadi dua yaitu sistem abstrak dan sistem fisik. Sistem abstrak merupakan suatu sistem yang tidak bisa dipegang atau dilihat secara kasat mata atau lebih sering disebut sebagai prosedur, contohnya dari sistem abstrak adalah prosedur pembayaran keuangan mahasiswa, prosedur belajar mengajar, sistem akademik, sistem diperusahaan, sistem antara manusia dengan Tuhan, dan lain-lain.
Sistem fisik merupakan sistem yang bisa dilihat dan bisa dipegang oleh panca indera.Contoh dari sistem fisik adalah sistem komputer, sistem transportasi, sistem akuntansi, sistem perguruan tinggi, sistem mesin pada kendaraan bermotor, sistem mesin mobil, sistem mesin-mesin perusahaan.
Dilihat dari fungsinya, baik sistem abstrak maupun sistem fisik memiliki fungsi yang pentingnya, sistem abstrak berperan penting untuk mengatur proses-proses atau prosedur yang nantinya berguna bagi sistem lain agar dapat berjalan secara optimal sedangkan sistem fisik berperan untuk mengatur proses dari benda-benda atau alat-alat yang bisa digunakan untuk mendukung proses yang ada di dalam organisasi.
b. Sistem dapat dipastikan dan Sistem tidak dapat dipastikan
Sistem dapat dipastikan merupakan suatu sistem yang input proses dan outputnya sudah ditentukan sejak awal. Sudah dideskripsikan dengan jelas apa inputannya bagaimana cara prosesnya dan harapan yang menjadi outputnya seperti apa. Sedangkan sistem tidak dapat dipastikan atau sistem probabilistik merupakan sebuah sistem yang belum terdefinisi denganjelas salah satu dari input-proses-output atau ketiganya belum terdefinisi dengan jelas.
c. Sistem Tertutup dan Sistem Terbuka
Sistem tertutup dan sistem terbuka yang membedakan adalah ada faktor-faktor yang mempengaruhi dari luar sistem atau tidak, jika tidak ada faktor-faktor yang mempengaruhi dari luar itu bisa disebut dengan sistem tertutup tapi jika ada pengaruh komponen dari luar disebut sistem terbuka.
a. Sistem Manusia dan Sistem Mesin
Sistem manusia dan sistem mesin merupakan sebuah klasifikasi sistem jika dipandang dari pelakunya.Pada zaman yang semakin global dan semuanya serba maju ini tidak semua sistem dikerjakan oleh manusia tapi beberapa sistem dikerjakan oleh mesin tergantung dari kebutuhannya.
Sistem manusia adalah suatu sistem yang proses kerjanya dilakukan oleh manusia sebagai contoh pelaku sistem organisasi,sistem akademik yang masih manual, transaksi jual beli di pasar tradisional, dll. Adapun sistem mesin merupakan sebuah sistem yang proses kerjanya dilakukan oleh mesin, sebagai contoh sistem motor, mobil, mesin industri, dan lain-lain.
b. Sistem Sederhana dan Sistem Kompleks
Sistem dilihat dari tingkat kekomplekan masalahnya dibagi menjadi dua yaitu sistem sederhana dan sistem kompleks.Sistem sederhana merupakan sistem yang sedikit subsistemnya dan komponen-komponennya pun sedikit. Adapun sistem kompleks adalah sistem yang banyak sub-sub sistemnya sehingga proses dari sistem itu sangat rumit.
c. Sistem Bisa Beradaptasi dan Sistem Tidak Bisa Beradaptasi
Sistem yang bisa berdaptasi terhadap lingkungannya merupakan sebuah sistem yang mampu bertahan dengan adanya perubahan lingkungan.Sedangkan sistem yang tidak bisa beradaptasi dengan lingkungan merupakan sebuah sistem yang tidak mampu bertahan jika terjadi perubahan lingkungan.
d. Sistem Buatan Allah/Alam dan Sistem Buatan Manusia
Sistem buatan Allah merupakan sebuah sistem yang sudah cukup sempurna dan tidak ada kekuranganya sedikitpun dari sistem ini,misalnya sistem tata surya, sistem pencernaan manusia, dan lain-lain. Sedangkan sistem buatan manusia merupakan sebuah sistem yang telah dikembangkan oleh manusia itu sendiri, sistem ini bisa dirubah sesuai dengan perkembangan zaman dan kebutuhan hidup.Sistem buatan manusia secara umum bisa disesuaikan dengan kebutuhan, jika kebutuhannya berubah maka sistem yang sudah ada tadi juga bisa berubah.
e. Sistem Sementara dan Sistem Selamanya
Sistem sementara dan sistem selamanya merupakan klasifikasi sistem jika dilihat dari pemakaiannya. Sistem sementara merupakan sebuah sistem yang dibangun dan digunakan untuk waktu sementara waktu sebagai contoh sistem pemilihan presiden, setelah proses pemilihan presiden sudah tidak dipakai lagi dan untuk pemilihan lima tahun mendatang kemungkinan sudah dibuat sistem pemilihan presiden yang baru. Sedangkan sistem selamanya merupakan sistem yang dipakai untuk jangka panjang atau digunakan selamanya, misalnya sistem pencernaan.
5.Tujuan Sistem
Menurut Taufiq (2013:5), tujuan sistem merupakan sasaran atau hasil yang diinginkan. Manusia, tumbuhan, hewan, organisasi, lembaga dan lain sebagainya pasti memiliki tujuan yang bermanfaat minimal bagi dia sendiri atau bagi lingkungannya. Tujuan sangatlah penting karena tanpa tujuan yang jelas segala sesuatu pasti akan hancur dan berantakan tapi dengan tujuan yang jelas akan lebih besar kemungkinan akan tercapai sasarannya. Begitu juga sistem yang baik adalah sistem yang memiliki tujuan yang jelas dan terukur yang memungkinkan untuk dicapai dan memiliki langkah-langkah yang terstuktur untuk mencapainya. Dengan tujuan yang jelas dan terukur serta menggunkan langkah-langkah terstruktur kemungkinan besar sistem itu akan tercapai tujuannya sesuai dengan apa yang telah menjadi tujuannya.
6.Daur Hidup Sistem
Menurut Sutabri (2012:27), Siklus Hidup Sistem adalah proses evolusioner yang diikuti dalam menerapkan sistem atau subsistem informasi berbasis komputer.
Fase atau tahapan dari daur hidup suatu sistem:
a. Mengenali adanya kebutuhan
Sebelum segala sesuatunya terjadi, timbul suatu kebutuhan yang harus dapat dikenali.Kebutuhan dapat terjadi sebagai hasil pengembangan dari organisasi dan volume yang meningkat melebihi kapasitas dari sistem yang ada.Suatu kebutuhan ini harus dapat didefinisikan dengan jelas. Tanpa adanya kejelasan dari kebutuhan yang ada, pembangunan sistem akan kehilangan arah dan efektifitasnya.
b. Pembangunan sistem
Suatu proses atau perangkat prosedur yang harus diikuti untuk menganalisa kebutuhan yang timbul dan membangun suatu sistem untuk dapat memenuhi kebutuhan tersebut.
c. Pemasangan sistem
Setalah tahap pembangunan sistem selesai,sistem akan dioperasikan. Pemasangan sistem merupakan tahap yang penting dalam daur hidup sistem.Didalam peralihan dari tahap pembangunan menuju tahap operasional terjadi pemasangan sistem yan sebenarnya yang merupakan langkah akhir dari suatu pembangunan sistem.
d. Pengoperasian sistem
Program-program komputer dan prosedur-prosedur pengoperasian yang membentuk suatu sistem informasi semuanya bersifat statis, sedangkan organisasi ditunjang oleh sistem informasi tadi dapat selalu mengalami perubahan-perubahan itu karena pertumbuhan kegiatan bisnis, perubahan peraturan, dan kebijaksanaan ataupun kemajuan teknologi.Untuk perubahan-perubahan tersebut, sistem harus diperbaiki atau diperbaharui.
e. Sistem menjadi usang
Kadang perubahan yang terjadi begitu drastis sehingga tidak dapat diatasi hanya dengan melakukan perbaikan-perbaikan pada sistem yang berjalan.Tibalah saatnya secara ekonomis dan teknik sistem yang ada sudah tidak layak lagi untuk dioperasikan dan sistem yang baru perlu dibangun untuk menggantikannya.
Konsep Dasar Sistem Komputer
A. Definisi Sistem Komputer
Menurut Ariesto (2012)[2]“sistem komputer adalah elemen-elemen yang terkait untuk menjalankan suatu aktifitas dengan menggunakan komputer. Elemen dari sistem komputer terdiri dari manusia (brainware), perangkat lunak (software), dan perangkat keras (hardware)”.
Menurut Wikipedia[3], “Sistem komputer adalah suatu jaringan elektronik yang terdiri dari perangkat lunak dan perangkat keras yang melakukan tugas tertentu (menerima input, memproses input, menyimpan perintah-perintah, dan menyediakan output dalam bentuk informasi)”.
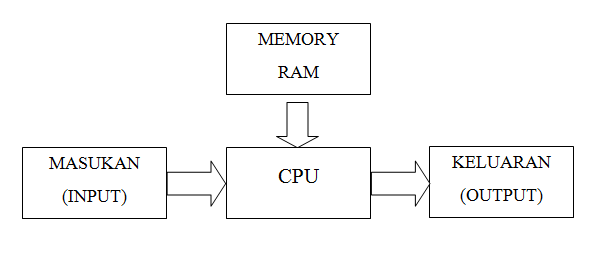
Menurut Nugraha (2001:1), yang dikutip dari Toibah Umi Kalsum, dan Siswanto pada Jurnal Media Infotama Vol. 8 No. 1 Februari 2012 [4], “Komputer adalah seperangkat alat elektronika yang terdiri dari perangkat input (masukan), output (keluaran), central processing unit (CPU), memori (media penyimpanan sementara), dan media penyimpanan (hardisk) yang saling bekerja sama dalam mengolah data dan mengoperasikan perhitungan, serta manipulasi data atau informasi seperti grafik, symbol dan suara. Agar komputer dapat mengolah data maka terdapat tiga komponen yaitu perangkat keras (hardware), perangkat lunak (software) dan pengguana (brainware)”.
berdasarkan dari ke tiga definisi tersebut dapat disimpukan sistem komputer adalah Kumpulan perangkat elektronik yang terdiri dari perangkat lunak(software), perangkat keras(hardware) untuk menerima data (input), memproses (process), dengan campur tangan manusia (brainware) untuk menghasilkan suatu proses keluaran (output) dari proses yang di laksanakan melalui sistem.
B. Karakteristik Sistem Komputer
Sumber : Devita, Retno. 2013. “Otomatisasi Penghitungan Nilai Quiz Cerdas Cermat Dilengkapi Tombol Group Dan Database Nilai”. Jurnal Teknlogi informasi dan pendidikan VOL. 6 NO. 1 Maret 2013.
Gambar 2.6. Arsitektur Komputer dari von neuman.
1. Perangkat Keras (Hardware)
Menurut Daryanto (2004:19), yan di kutip dari Toibah Umi Kalsum, dan Siswanto pada Jurnal Media Infotama Vol. 8 No. 1 Februari 2012 [4]Perangkat keras (hardware) adalah segala peralatan komputer yang dapat dilihat dan dipegang. Sistem komputer terdiri dari input device, central processing unit, output device dan memori.
a. Perangkat masukan (Input Device)
Adalah suatu alat atau media yang menerima input data kemudian membacanya dan meneruskanya kepada memori yang terdapat didalam central processing unit. Untuk mengetahui input yang akan diolah, alat pengolahan akan diberi tahu oleh suatu program yang dibuat oleh programer. Beberap peralatan masukan yang banyak digunakan sebagai media adalah mouse, keyboard, scanner.
b. Perangkat Pengolahan (Central Processing Unit)
Dalam sistem komputer, central processing unit merupakan otak yang berfungsi sebagai pusat pengolahan dan mengontrol dari keseluruhan data processing sistem. CPU terdiri dari bagian-bagian yang masingmasing mempunyai tugas yang saling bekerja sama.
c. Perangkat Keluaran (Output Device)
Perangkat keluaran (Output Device) adalah suatu alat yang menerima hasil pengolahan dari CPU melalui memori dan memberikan hasil pengolahan (output). Beberapa macam output device yang banyak digunakan saat ini adalah printer, monitor, speaker dan lain sebagainya.
d. Penyimpanan Data (Memori)
Memori adalah tempat menyimpan data atau program yang terdapat dalam centaral processing unit.
2. Perangkat Lunak (Software)
Menurut Daryanto (2004:32), yang dikutip dari Toibah Umi Kalsum, dan Siswanto pada Jurnal Media Infotama Vol. 8 No. 1 Februari 2012.[4] Perangkat lunak adalah kumpulan data serta instruksi yang bersifat hidup pada komputer. Sifat software adalah perangkat yang tidak dapa dipegang secara fisik, hanya dirasakan manfaatnya. Software merupakan program-program yang berfungsi mengatur kerja hardware dan memiliki 5 (lima) kelompok software yaitu:
a. Sistem Operasi
Adalah software yang sifatnya mendasar dan bertujan agar perangkat lunak yang berfungsi utuk mengatur kerja komputer secara mendasar seperti mengatur media-media inputproses-output, mengatur memori, mengatur penjadwalan processor dan lain-lain.
b. Alat Bantu
Merupakan unsur dari sistem software yang berfungsi membantu pengoperasian mesin. Contoh alat bantu antara lain Norton, coppy tools, diagnostic test dan lain sebagainya.
c. Program Paket
Dipergunakan dalam penyedian berbagai fungsi yang siap pakai. Contohnya dari program paket antara lain word processor, spredsheet.
d. Program Aplikasi
Sistem software yang berfungsi untuk menyiapkan sistem apliksi yang siap pakai dalam aplikasi tertentu. Contoh program aplikasi adalah print shop, form tool dan lainlainnya.
e. Bahasa Pemrograman
Bahasa merupakan suatu kumpulan simbolsimbol yang terbatas kumpulan ini disebut alphabet. Untaian yang menjadi bagian dari suatu bahasa di sebut kata atau kalimat.
3. Manusia ( Brainware)
Menurut Daryanto (2004:34), yang dikutip dari Toibah Umi Kalsum, dan Siswanto pada Jurnal Media Infotama Vol. 8 No. 1 Februari 2012.[4] “manusia mempunyai tugas yang berbeda-beda pada komputer, ada yang bertugas sebagai perancang, pemrograman dan ada yang sebagai pemakai”. Menurut tugasnya manusia dapat dikelompokan menjadi :
Arsitektur Komputer CISC dan RISC
Menurut Wikipedia [5], “Arsitektur Komputer adalah adalah konsep perencanaan dan struktur pengoperasian dasar dari suatu sistem komputer. Arsitektur Komputer dapat didefinisikan dan dikategorikan sebagai ilmu dan sekaligus seni mengenai cara interkoneksi komponen-komponen perangkat keras untuk dapat menciptakan sebuah komputer yang memenuhi kebutuhan fungsional, kinerja, dan target biayanya.”
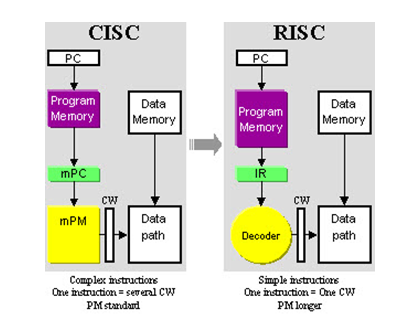
Gambar 2.7. Arsitektur CISC dan RISC.
A. Arsitektur CISC
Menurut Wikipedia,[6] CISC singkatan dari Complex Instruction Set Computer adalah sebuah arsitektur dari set instruksi komputer dimana setiap instruksi akan menjalankan beberapa operasi tingkat rendah, seperti pengambilan dari memori, operasi aritmetika, dan penyimpanan ke dalam memory, semuanya sekaligus hanya di dalam sebuah instruksi.
Contoh-contoh prosesor CISC adalah System/360, VAX, PDP-11, varian Motorola 68000 , dan CPU AMD dan Intel x86.
B. Arsitektur RISC
Menurut Wikipedia,[7] RISC (Reduced Instruction Set Computing), yang jika diterjemahkan berarti "Komputasi Kumpulan Instruksi yang Disederhanakan" merupakan sebuah arsitektur komputer atau arsitektur komputasi modern dengan instruksi-instruksi dan jenis eksekusi yang paling sederhana. Arsitektur ini digunakan pada computer dengan kinerja tinggi, seperti komputer vektor. Selain digunakan dalam komputer vektor, desain ini juga diimplementasikan pada prosesor komputer lain, seperti pada beberapa mikroprosesor Intel 960, Alpha AXP dari DEC, R4x00 dari MIPS Corporation, PowerPC dan Arsitektur POWER dari International Business Machine. Selain itu, RISC juga umum dipakai pada Advanced RISC Machine (ARM) dan StrongARM (termasuk diantaranya adalah Intel XScale), SPARC dan UltraSPARC dari Sun Microsystems, serta PA- RISC dari Hewlett-Packard.
Konsep Dasar Pengontrolan
A. Definisi Pengontrolan
Menurut Erinofiardi (2012:261)[8], “Suatu sistem kontrol otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia (otomatis)”.
Kontrol otomatis mempunyai peran penting dalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmu pengetahuan dan teknologi, sistem kontrol otomatis telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengan cara yang lebih mudah, efisien dan efektif. Adanya kontrol otomatis secara tidak langsung dapat menggantikan peran manusia dalam meringankan segala aktifitasnya.
Berdasarkan Ejaan Yang Disempurnakan (EYD) pengontrolan berasal dari kata kontrol. Kontrol sama dengan pengawasan, pemeriksaan dan pengendalian. Pada industri besar dan modern sangat memerlukan tenaga ahli perencanaan sistem pengendali dan perancangan desain sistem pengendali, termasuk teknisi profesional sebagai operator. Tidak menutup kemungkinan bahwa pengontrolan berasal dari berbagai disiplin ilmu yang saling berhubungan karena teori sistem pengendali modern dikembangkan guna mengatasi kerumitan yang dijumpai pada berbagai sistem pengendalian yang menuntut kecepatan dan ketelitian yang tinggi dengan hasil output yang optimal.
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka ( Open-loop Control System ) dan Sistem Pengendali Loop Tertutup ( Closed-loop Control System ).
B. Jenis – Jenis Pengontrolan
1. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi (2012:261)[8] sistem kontrol loop terbuka adalah ”suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian”.
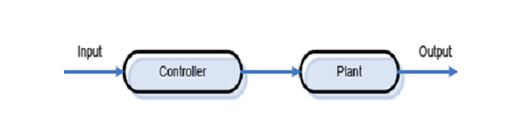
Sumber : Erinofiardi (2012:261)/
Gambar 2.8. Sistem Pengendali Loop Terbuka.
Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
2. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012:261)[8], Sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.” Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.
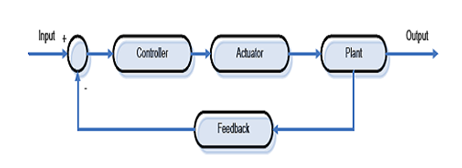
Sumber : Erinofiardi (2012:262)
Gambar 2.9. Sistem Pengendali Loop Tertutup.
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.
Konsep Dasar Analisa SDLC
A. Pengertian SDLC
Menurut Rosa dan shalahuddin (2016:25),[9] “SDLC singkatan dari Software Development Life Cycle atau kadang disebut juga System Development Life Cycle. SDLC adalah proses mengembangkan atau mengubah suatu sistem perangkat lunak dengan menggunakan model – model dan metodologi yang digunakan orang untuk mengembangkan sistem-sistem perangkat lunak sebelumnya”.
B. Tahapan-tahapan pada SDLC
1. Inisiasi ( initiation)
Tahap ini biasanya ditandai dengan pembuatan proposal proyek perangkat lunak.
2. Pengembangan Konsep Sistem (system concept development)
Mendifinisakn lingkup konsep termasuk dokumen lingkup sistem, analisis biaya, analisis manfaat biaya, manajemen rencana, dan pembelajaran kemudahan sistem.
3. Perencanaan (planning)
Mengembangkan rencana manajemen proyek dan dokumen perencanaan lainnya. Menyediakan dasar untuk mendapatkan sumber daya (resources) yang dibutuhkan untuk memperoleh solusi.
4. Analisis Kebutuhan (requirements analysis)
Menganalisis kebutuhan pemakai sistem perangkat lunak (user) dan mengembangkan kebutuhan user. Membuat dokumen kebutuhan fungsional.
5. Desain (design)
Menstrafortasikan kebutuhan detail menjadi kebutuhan yang sudah lengkap, dokumen desain sistem fokus pada bagaimana dapat memenuhi fungsi-fungsi yang dibutuhkan.
6. Pengembangan (development)
Mengonversi desain ke sistem informasi yang lengkap termasuk bagaimana memperoleh dan melakukan instalasi lingkungan sistem yang dibutuhkan; membuat basis data dan mempersiapkan prosedur kasus pengujian; mepersiapkan berkas atau file pengujian,pengodean, pengompilasian, memperbaiki dan mebersihkan program; peninjauan pengujian.
7. Integrasi dan Pengujian (integration and test)
Mendemostrasikan sistem perangkat lunak bahwa telah memenuhi kebutuhan yang dispesifikasikan pada dokumen kebutuhan fungsional. Dengan diarahkan oleh staf penjamin kualitas (quality assurance) dan user. Menghasilkan laporan analisis pengujian.
8. Implementasi (implementation)
Termasuk pada persiapan implementasi, implementasi perangkat lunak pada lingkungan produksi (lingkungan pada user) dan menjalankan resolusi dari permasalahan yang teridentifikasi dari fase integrasi dan pengujian.
9. Operasi dan Pemeliharann (operation and maintenance)
Mendeskripsikan pekerjaan untuk mengoperasikan dan memelihara sistem informasi pada lingkungan produksi (lingkungan pada user), termasuk pada implementasi akhir dan masuk pada proses peninjauan.
10. Disposisi (disposition)
Mendeskripsikan aktifitas akhir dari pengembangan sistem dan membangun data yang sebenarnya sesuai dengan aktifitas user.
C. Model Prototype
Menurut Seema dan Malhotra pada International Journal Of Advances In Computing And Information Technology (2012:279),[10] “Prototyping is an attractive idea for complicated and large systems for which there is no manual process or existing system to help determining the requirements. A prototype is a toy implementation of a system; usually exhibiting limited functional capabilities, low reliability, and inefficient performance.”
“Prototyping adalah ide menarik untuk sistem yang rumit dan besar dengan tidak ada proses manual atau sistem yang ada untuk membantu menentukan kebutuhan. Sebuah prototipe adalah implementasi mainan dari sistem; biasanya, ditunjukkan dengan kemampuan terbatas fungsional, kehandalan rendah, dan kinerja yang tidak efisien.”
Menurut Rosa dan shalahuddin (2016:31),[9] “Model Prototipe dapat digunakan untuk menyamungkan ketidakpahaman pelanggan mengenai hal teknis dan memperjelas spesifikasi kebutuhan yang diinginkan pelanggan kepada pengembang perangkat lunak”.
Model prorotipe (prototyping model) dimulai dari mengumpulkan kebutuhan pelanggan terhadap perangkat lunak yang akan dibuat. Program prototipe biasanya merupakan program yang belum jadi. Program ini biasanya menyediakan tampilan dengan simulasi alur perangkat lunak sehingga tampak seperti perangkat lunak yang sudah jadi. Program prototipe ini dievaluasi oleh pelanggan atau user sampai ditemukan spesifikasi yang sesuai dengan keinginan pelanggan atau user.
Sumber : Rosa (2016:32)
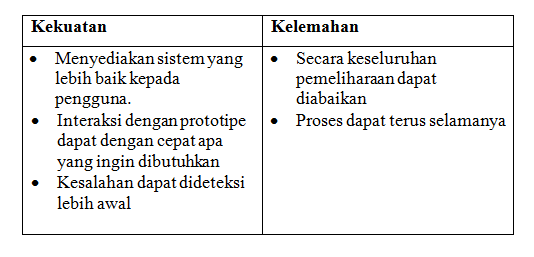
Mock-up adalah sesuatu yang digunakan sebagai model desain yang digunakan untuk demonstrasi, evaluasi desain, atau keperluan lain.mampu mendemonstrasikan sebagian besar fungsi sistem perangkat lunak dan memungkinkan pengujian desain sistem perangkat lunak.
Tabel 2.1. Kelebihan dan kekurangan prototipe.
Konsep Dasar Perancangan Sistem
A. Definisi Perancangan Sistem
Menurut Verzello/John Reuter III dalam Darmawan (2013:227)[11], “Perancangan Sistem adalah tahap setelah analisis dari siklus pengembangan sistem pendefinisian dari kebutuhan-kebutuhan fungsional dan persiapan untuk rancang bangun implementasi: “menggambarkan bagaimana suatu sistem dibentuk”.
Menurut Subhan (2012:109)[12] dalam bukunya yang berjudul Analisa Perancangan Sistem mengungkapkan: “Perancangan adalah proses pengembangan spesifikasi baru berdasarkan rekomendasi hasil analisis sistem”.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan perancangan sistem adalah suatu tahapan perencanaan untuk membentuk suatu sistem agar dapat berfungsi.
B. Tujuan Perancangan Sistem
Menurut Darmawan (2013:228)[11], Tahap Perancangan/Desain Sistem mempunyai 2 tujuan utama, yaitu:
Menurut Sutabri (2012:225)[13], tahap rancangan sistem dibagi menjadi 2 (dua) bagian, yaitu rancangan sistem secara umum dan rinci. Adapun tujuan utama dari tahap rancangan sistem ini adalah sebagai berikut:
Konsep Dasar Flowchart
A. Definisi Flowchart
Menurut Iswandi (2015:73)[14], “Flowchart merupakan urutan-urutan langkah kerja suatu proses yang digambarkan dengan menggunakan simbol-simbol yang disusun secara sistematis”.
Menurut Adelia (2011:116)[15], “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”. Berdasarkan kedua definisi di atas, maka dapat disimpulkan Flowchart adalah bentuk gambar diagram/grafik yang menggambarkan langkah-langkah atau urutan dari suatu program atau sistem.
B. Simbol – Simbol Flowchart
Flowchart terbentuk dari simbol atau gambar yang mewakili setiap fungsinya untuk mempresentasikan sebuah alur, Simbol flowchart yang berbeda juga memiliki arti yang berbeda, namun beberapa symbol umum yang digunakan pada flowchart berikut adalah sebagai berikut:
Tabel 2.2. Simbol-simbol Flowchart.
C. Cara Membuat Flowchart
Ada beberapa petunjuk dalam pembuatan Flowchart Menurut Sulindawati(2010:8)[16] :
D. Jenis-Jenis Flowchart
Menurut Tri (2015:2)[17], flowchart terbagi atas lima jenis, yaitu:
1. Flowchart Sistem (System Flowchart)
Flowchart sistem merupakan bagan yang menunjukkan alur kerja atau apa yang sedang dikerjakan di dalam sistem secara keseluruhan dan menjelaskan urutan dari prosedur-prosedur yang ada di dalam sistem. Dengan kata lain, flowchart ini merupakan deskripsi secara grafik dari urutan prosedur-prosedur yang terkombinasi yang membentuk suatu sistem. Flowchart Sistem terdiri dari data yang mengalir melalui sistem dan proses yang mentransformasikan data itu.
Sumber: Tri (2015:3)
Gambar 2.11. Flowchart Sistem (System Flowchart).
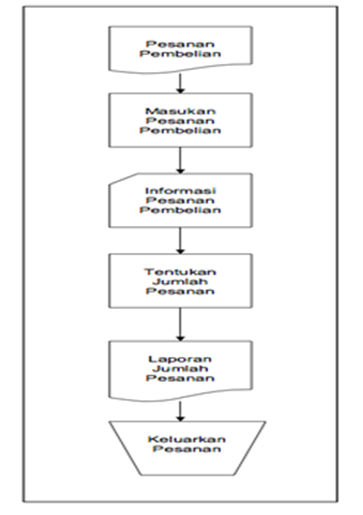
2. Flowchart Dokumen (Document Flowchart)
Flowchart dokumen kegunaan utamanya adalah untuk menelusuri alur form dan laporan sistem dari satu bagian ke bagian lain baik bagaimana alur form dan laporan diproses, dicatat dan disimpan.

Sumber: Tri (2015:4)
Gambar 2.12. Flowchart Dokumen (Document Flowchart).
3. Flowchart Skematik (Schematic Flowchart)
Flowchart skematik mirip dengan flowchart sistem yang menggambarkan suatu sistem atau prosedur. Flowchart Skematik ini bukan hanya menggunakan simbol-simbol flowchart standar, tetapi juga menggunakan gambar-gambar komputer, peripheral, form-form atau peralatan lain yang digunakan dalam sistem. Flowchart Skematik digunakan sebagai alat komunikasi antara analis sistem dengan seseorang yang tidak familiar dengan simbol-simbol flowchart yang konvensional. Pemakaian gambar sebagai ganti dari simbol-simbol flowchart akan menghemat waktu yang dibutuhkan oleh seseorang untuk mempelajari simbol abstrak sebelum dapat mengerti flowchart. Gambar-gambar ini mengurangi kemungkinan salah pengertian tentang sistem, hal ini disebabkan oleh ketidak-mengertian tentang simbol-simbol yang digunakan. Gambar-gambar juga memudahkan pengamat untuk mengerti segala sesuatu yang dimaksudkan oleh analis, sehingga hasilnya lebih menyenangkan dan tanpa ada salah pengertian.
Sumber: Tri (2015:5)
Gambar 2.13. Flowchart Skematik (Schematic Flowchart).
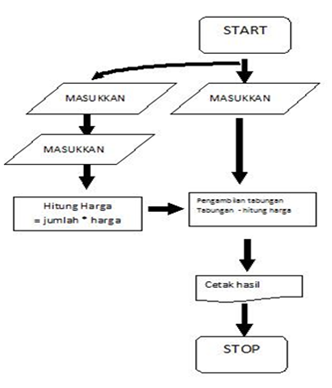
4.Flowchart Program (Program Flowchart)
Flowchart program dihasilkan dari flowchart sistem. Flowchart Program merupakan keterangan yang lebih rinci tentang bagaimana setiap langkah program atau prosedur sesungguhnya dilaksanakan. Flowchart ini menunjukkan setiap langkah program atau prosedur dalam urutan yang tepat saat terjadi. Programmer menggunakan flowchart program untuk menggambarkan urutan instruksi dari program komputer. Analis Sistem menggunakan flowchart program untuk menggambarkan urutan tugas-tugas pekerjaan dalam suatu prosedur atau operasi.

Sumber: Tri (2015:6).
Gambar 2.14. Flowchart Program (Program Flowchart).
5. Flowchart Proses (Process Flowchart)
Flowchart proses merupakan teknik penggambaran rekayasa industrial yang memecah dan menganalisis langkah-langkah selanjutnya dalam suatu prosedur atau sistem. Flowchart proses memiliki lima simbol khusus.
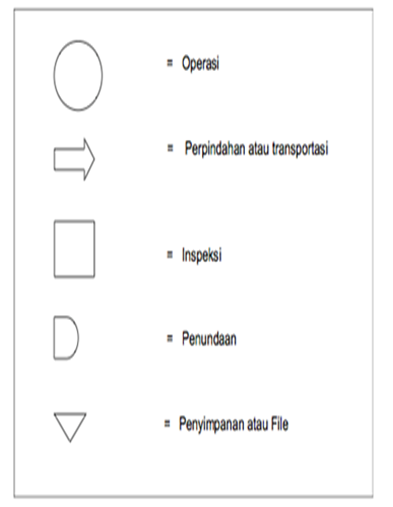
Sumber: Tri (2015:7).
Gambar 2.15. Simbol Flowchart Proses.
Flowchart Proses digunakan oleh perekayasa industrial dalam mempelajari dan mengembangkan proses-proses manufacturing. Dalam analisis sistem, flowchart ini digunakan secara efektif untuk menelusuri alur suatu laporan atau form. Berikut adalah contoh gambar dari flowchart proses:
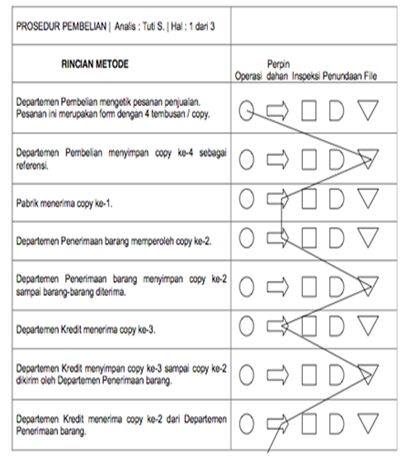
Sumber: Tri (2015:8).
Gambar 2.16. Flowchart Proses (Process Flowchart).
Konsep Dasar prototype
A. Definisi Prototype
Rosmala, dkk dalam jurnal informatika Vol 3 (2012:60)[18], “prototype merupakan metode yang menyajikan gambaran yang lengkap tentang sistemnya, pemesan dapat melihat pemodelan sistem dari sisi tampilan maupun teknik procedural yang akan dibangun”.
Menurut seema dan malhotra[10], dalam international journal of advances incomputing and information technology (2012:279), “Sebuah prototype adalah implementasi mainan dari sistem, biasanya, ditunjukkan terbatas kemampuan fungsional, kehandalan rendah, dan kinerja yang kurang efisien.”
Dari kedua definisi tersebut maka dapat disimpulkan bahwa Prototype adalah proses dari produk atau sistem dalam bentuk pembuatan yang dapat dirubah sesuai keinginan sebelum direalisasikan.
B. Jenis – jenis prototype
Menurut Darmawan (2013:230)[11], jenis-jenis Prototipe secara general dibagi menjadi dua, yaitu:
1. Prototipe evolusioner (Prototype Evolusionary)
Terus-menerus disempurnakan sampai memiliki seluruh fungsionalitas yang dibutuhkan pengguna dari sistem yang baru. Prototipe ini kemudian dilanjutkan produksi. Jadi satu prototipe evolutioner akan menjadi sistem aktual.
2. Prototipe persyaratan (Prototype Reqiument)
Dikembangkan sebagai satu cara untuk mendefinisikan persyaratan-persyaratan fungsional dari sistem baru ketika pengguna tidak mampu mengungkapkan apa yang mereka inginkan. Dengan meninjau prototipe persyaratan seiring dengan ditambahkannya fitur-fitur, pengguna akan mampu mendefinisikan pemrosesan yang dibutuhkan dari sistem yang baru. Ketika persyaratan ditentukan, prototipe persyaratan telah mencapai tujuannya dan proyek lain akan dimulai untuk pengembangan sistem baru. Oleh karena itu, suatu prototipe tidak selalu menjadi sistem aktual.
Langkah-langkah pembuatan Prototype Evolutionary ada empat langkah, yaitu :
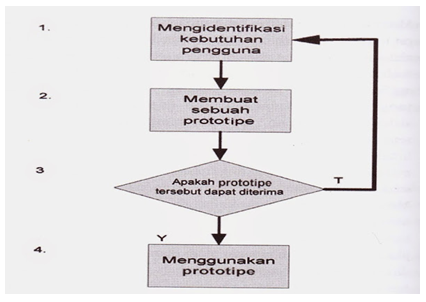
Sumber: Darmawan (2013:232)
Gambar 2.17. Pembuatan Prototipe Evolusioner.
Konsep Dasar Pengujian
A. Definisi Pengujian
Menurut Simarmata (2010:323)[19], “Pengujian adalah proses terhadap aplikasi. Program untuk menemukan segala kesalahan dan segala kemungkinan yang akan menimbulkan kesalahan sesuai dengan spesifikasi perangkat lunak yang telah ditentukan sebelum aplikasi tersebut diserahkan kepada pelanggan”.
Menurut Rizky (2011:237)[20], “Testing adalah sebuah proses yang diejawantahkan sebagai siklus hidup dan merupakan bagian dari proses rekayasa perangkat lunak secara terintegrasi demi memastikan kualitas dari perangkat lunak serta memenuhi kebutuhan teknis yang telah disepakati dari awal”.
Berdasarkan kedua definisi di atas, maka dapat disimpulkan bahwa pengujian adalah suatu proses sebagai siklus hidup dan proses rekayasa terhadap aplikasi program secara terintegrasi untuk menemukan kesalahan program demi memastikan kualitas dari perangkat lunak serta memenuhi kebutuhan teknis sebelum diserahkan kepada pelanggan.
B. Proses-Proses Pengujian
Menurut Simarmata (2010:312)[19], pengujian dapat dilakukan pada tingkatan berikut:
1. Pengujian Unit (Unit Testing)
Menguji komponen perangkat lunak komponen atau modul. Setiap unit (komponen dasar) dari perangkat lunak yang diuji harus dipastikan bahwa desain terperinci untuk unit telah dilakukan dengan benar. Dalam sebuah lingkungan yang berorientasi objek, pengujian ini biasanya terjadi di tingkat kelas dan unit pengujian minimal termasuk constructors dan destrutors.
2. Pengujian Integrasi (Integration Testing)
Menjelaskan kecacatan dalam antarmuka dan interaksi antar komponen terpadu (modul). Semakin besar kelompok komponen perangkat lunak yang diuji terkait dengan elemen-elemen dari desain arsitekturnya akan dipadukan dan diuji sampai perangkat lunak bekerja sebagai sistem.
3. Pengujian Sistem (System Testing)
Menguji sistem terpadu secara penuh untuk memastikan bahwa sistem telah memenuhi persyaratan.
4. Pengujian Sistem Integrasi (System Integration Testing)
Memverifikasi sistem terpadu untuk semua sistem eksternal atau pihak ketiga yang telah ditetapkan di dalam persyaratan sistem.
C. Black Box Testing
Menurut Warsito (2015:32)[21], "black box testing adalah metode uji coba yang memfokuskan pada keperluan software. Metode pengujian black box berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya: fungsi-fungsi yang salah atau hilang, kesalahan interface, kesalahan dalam struktur data atau akses database, kesalahan performa dan kesalahan validasi data”.
Menurut Srinivas Nidhra dan Jagruthi Dondeti pada International Journal of Embedded Systems and Applications ( IJESA, Vol.2, No.2, 2012)[22] “Black box testing is also called as functional testing, a functional testing technique that designs test cases based on the information from the specification With black box, Black box testing not concern with the internal mechanisms of a system; these are focus solely on the outputs generated in response to selected inputs and execution conditions the code”.
(pengujian black box disebut sebagai uji fungsional, pengujian fungsional, teknik yang mendesain uji kasus berdasarkan informasi dari spesifikasi dengan kotak hitam, pengujian kotak hitam tidak memperhatikan mekanisme internal sistem hanya berfokus pada output yang dihasilkan dalam menanggapi input yang dipilih dan kondisi eksekusi kode).
Menurut Shivani Archarya dan Vidhi Pandya dalam International Journal of Electronics and Computer Science Engineering (ISSN-2277-1956 Vol.2 No.1, 2013)[23], ”Black box testing is a software testing techniques in which functionality of the software under test (SUT) is tested without looking at the internal code structure,”
(Kotak hitam pengujian adalah teknik di mana fungsi dari perangkat lunak di bawah ujian (SUT) diuji tanpa memandang struktur internal kode, pengujian perangkat lunak)
Berdasarkan ketiga definisi di atas, maka dapat disimpulkan bahwa black box testing adalah metode pengujian atau uji coba yang memfokuskan pada keperluan software atau perangkat lunak untuk mengetahui apakah perangkat lunak sudah berfungsi dengan benar.
D. Metode Pengujian Black Box Testing
Ada beberapa macam metode pengujian Black Box, berikut diantaranya:
1. Equivalence Partioning
Equivalence Partioning merupakan metode uji coba Black Box yang membagi domain input dari program menjadi beberapa kelas data dari kasus uji coba yang dihasilkan. Kasus uji penanganan single yang ideal menemukan sejumlah kesalahan (misalnya: kesalahan pemrosesan dari seluruh data karakter) yang merupakan syarat lain dari suatu kasus yang dieksekusi sebelum kesalahan umum diamati.
2. Boundary Value Analysis
Sejumlah besar kesalahan cenderung terjadi dalam batasan domain input dari pada nilai tengah. Untuk alasan ini boundary value analysis (BVA) dibuat sebagai teknik uji coba. BVA mengarahkan pada pemilihan kasus uji yang melatih nilai-nilai batas. BVA merupakan desain teknik kasus uji yang melengkapi Equivalence partitioning. Dari pada memfokuskan hanya pada kondisi input, BVA juga menghasilkan kasus uji dari domain output.
3. Cause-Effect Graphing Techniques
Cause-Effect Graphing merupakan desain teknik kasus uji coba yang menyediakan representasi singkat mengenai kondisi logikal dan aksi yang berhubungan. Tekniknya mengikuti 4 tahapan berikut:
4. Comparison Testing
Dalam beberapa situasi (seperti: aircraft avionic, nuclear Power plant control) dimana keandalan suatu software amat kritis beberapa aplikasi sering menggunakan software dan hardware ganda (redundant). Ketika software redundant dibuat, tim pengembangan software lainnya dibangun versi independent dari aplikasi dengan menggunakan spesifikasi yang sama. Setiap versi dapat diuji dengan data uji yang sama untuk memastikan seluruhnya menyediakan output yang sama. Kemudian seluruh versi dieksekusi secara parallel dengan perbandingan hasil real-time untuk memastikan konsistensi.Dianjurkan bahwa versi independent suatu software untuk aplikasi yang amat kritis harus dibuat, walaupun nantinya hanya satu versi saja yang akan digunakan dalam sistem. Versi independent ini merupakan basis dari teknik Black Box Testing yang disebut Comparison Testing atau back-to-back Testing.
5. Sample and Robustness Testing
• Sample Testing
Melibatkan beberapa nilai yang terpilih dari sebuah kelas ekivalen, seperti Mengintegrasikan nilai pada kasus uji. Nilai-nilai yang terpilih mungkin dipilih dengan urutan tertentu atau interval tertentu.
• Robustness Testing
Pengujian ketahanan (Robustness Testing) adalah metodologi jaminan mutu difokuskan pada pengujian ketahanan perangkat lunak. Pengujian ketahanan juga digunakan untuk menggambarkan proses verifikasi kekokohan (yaitu kebenaran) kasus uji dalam proses pengujian.
6. Behavior Testing dan Performance Testing
• Behavior Testing
Hasil uji tidak dapat dievaluasi jika hanya melakukan pengujian sekali, tapi dapat dievaluasi jika pengujian dilakukan beberapa kali, misalnya pada pengujian struktur data stack.
• Performance Testing
Digunakan untuk mengevaluasi kemampuan program untuk beroperasi dengan benar dipandang dari sisi acuan kebutuhan. Misalnya: aliran data, ukuran pemakaian memori, kecepatan eksekusi, dll. Selain itu juga digunakan untuk mencari tahu beban kerja atau kondisi konfigurasi program. Spesifikasi mengenai performansi didefinisikan pada saat tahap spesifikasi atau desain. Dapat digunakan untuk menguji batasan lingkungan program.
7. Requirement Testing
Spesifikasi kebutuhan yang terasosiasi dengan perangkat lunak (input/output/fungsi/performansi) diidentifikasi pada tahap spesifikasi kebutuhan dan desain.
• Requirement Testing melibatkan pembuatan kasus uji untuk setiap spesifikasi kebutuhan yang terkait dengan program. Untuk memfasilitasinya, setiap spesifikasi kebutuhan bisa di telusuri dengan kasus uji dengan menggunakan traceability matrix.
8. Endurance Testing
Endurance Testing melibatkan kasus uji yang diulang-ulang dengan jumlah tertentu dengan tujuan untuk mengevaluasi program apakah sesuai dengan spesifikasi kebutuhan. Contoh: Untuk menguji keakuratan operasi matematika (floating point, rounding off, dll), untuk menguji manajemen sumber daya sistem (resources)(pembebasan sumber daya yang tidak benar, dll), input/outputs (jika menggunakan framework untuk memvalidasi bagian input dan output). Spesifikasi kebutuhan pengujian didefinisikan pada tahap spesifikasi kebutuhan atau desain.
E. Kelebihan dan Kelemahan Black Box Testing
Dalam uji coba Black Box terdapat beberapa kelebihan dan kelemahan. Berikut adalah keunggulan dan kelemahannya:
Tabel 2.2. Kelebihan dan Kelemahan Black Box.
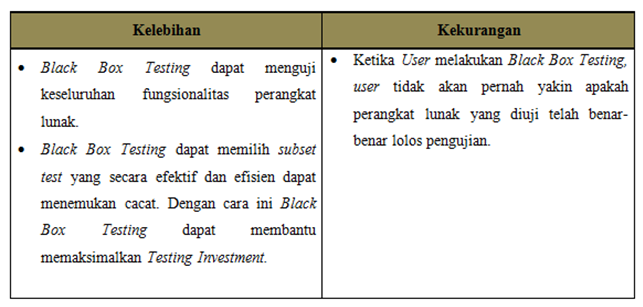
Sumber: Siddiq (2012:14).
Konsep Dasar Elisitasi
A. Definisi Elisitasi
Menurut Masooma Yousuf dan M.asger dalam International Journal Of Computer applications (0975-8887 Vol.116 No.4, 2014)[24], “Requirements Elicitation (RE) is defined as the process of obtaining a comprehensive understanding of stakeholder’s requirements. It is the initial and main process of requirements engineering phase. Elicitation process usually involves interaction with stakeholders to obtain their real needs”.
(Persyaratan elisitasi didefinisikan sebagai proses mendapatkan pemahaman yang komprehensif tentang persyaratan stakeholder. Ini adalah proses awal dan utama dari tahap rekayasa persyaratan. Proses elisitasi biasanya melibatkan interaksi dengan para pemangku kepentingan untuk mendapatkan kebutuhan mereka)
Menurut Sommerville and Sawyer (1997) dalam Siahaan (2012:66) [25], “Elisitasi kebutuhan adalah sekumpulan aktivitas yang ditunjukkan untuk menemukan kebutuhan suatu sistem melalui komunikasi dengan pelanggan, pengguna sistem, dan pihak lain yang memiliki kepentingan dalam pengembangan sistem”.
Menurut Guritno (2011:302)[26], “Elisitasi merupakan rancangan yang dibuat berdasarkan sistem baru yang diinginkan oleh pihak manajemen terkait dan disanggupi oleh penulis untuk dieksekusi”
Berdasarkan kedua definisi di atas, maka dapat disimpulkan elisitasi adalah suatu rancangan pada sistem baru yang diinginkan pengguna sistem dan pihak yang terkait untuk pengembangan sistem.
B. Tahap-Tahap Elisitasi
Menurut Guritno dan kawan-kawan (2011:302)[26], elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu :
1. Elisitasi Tahap I
Elisitasi tahap I, berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara.
2. Elisitasi Tahap II
Elisitasi tahap II, merupakan hasil pengklasifikasian elisitasi tahap I berdasarkan Metode MDI. Metode MDI bertujuan memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh penulis untuk dieksekusi.
Berikut penjelasan mengenai Metode MDI :
a. M pada MDI berarti Mandatory (penting).
Maksudnya, requirement tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
b. D pada MDI berarti Desirable.
Maksudnya, requirement tersebut tidak terlalu penting dan boleh dihilangkan. Namun, jika requirement tersebut digunakan dalam pembentukan sistem maka akan membuat sistem tersebut lebih sempurna.
c. I pada MDI berarti Inessential.
Maksudnya, requirement tersebut bukanlah bagian sistem yang dibahas, tetapi bagian dari luar sistem.
3. Elisitasi Tahap III
Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklaifikasikan kembali melalui metode TOE, yaitu :
a. T artinya Teknikal, bagaimana tata cara atau teknik pembuatan requirement dalam sistem diusulkan
b. O artinya Operasional, bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan
c. E artinya Ekonomi, berapakah biaya yang diperlukan guna membangun requirement di dalam sistem
Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu :
a. High (H): Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal maka requriement tersebut harus dieliminasi.
b. Middle (M): Mampu dikerjakan.
c. Low (L): Mudah dikerjakan.
C. Final Draft Elisitasi
Final Draft elisitasi, merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan dikembangakan.
Teori Khusus
Konsep Dasar Mikrokontroller
A. Definisi Mikrokontroller
Menurut Syahwill (2013:53)[27], “Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip yang di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program atau keduanya), dan perlengkapan input-output”.
Menurut santoso dkk di dalam jurnal FEMA vol.1 no.1 (2013:17)[28] mikrokontroler adalah sistem mikroprosesor lengkap yang terkandung di dalam sebuah chip. Mikrokontroler berbeda dari mikroprosesor serba guna yang digunakan dalam sebuah PC, karena sebuah mikrokontroler umumnya telah berisi komponen pendukung sistem minimal mikroprosesor, yakni memory dan program input-output.
Dari beberapa definisi-definisi diatas dapat disimpulkan bahwa Mikrokontroler adalah sebuah sistem mikroprosesor dalam chip tunggal yang dimana didalamnya terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya, dan juga mempunyai masukan dan keluaran serta kendali yang difungsikan untuk membaca data, dan dengan program yang bisa ditulis dan dihapus dengan cara khusus.
B. Jenis-jenis Mikrokontroller
Secara teknis hanya ada dua macam mikrokontroler. Pembagian ini di dasarkan pada kompleksita inttruksi-intruksi yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu, yaitu RISC dan CISC serta masing-masing keturunan atau keluarga sendi-sendiri.
1. RISC merupakan kependekan dari Reduced Instruction Set Computer. Intruksi yang dimiki terbatas, tetapi memiliki fasilitas yang lebih banyak.
2. Sebaliknya, CISC kependekan dari Complex Intruction Set Computer. Intruksi bisa dikatakan lebih lengkap tapi dengan fasilitas secukupnya.
Mikrokontroller Atmega 2560
A. Arsitektur Mikrokontroller Atmega 2560
Menurut Dian Artanto (2008:30) dalam arifin dkk Jurnal media Infotama Vol. 12 no 1, Februari 2016[29] . Mikrokontroller adalah piranti elektronik berupa Integrated Circuit (IC) yang memiliki kemampuan manipulasi data (informasi) berdasarkan suatu urutan instruksi (program) yang dibuat oleh programmer dimana di dalamnya sudah terdapat Central Proccesssing Unit (CPU), Random Acess Memory (RAM), Electrically Erasable Programmable Read Only Memori (EEPROM), I/O, Timer dan peralatan internal lainnya yang sudah saling terhubung terorganisasi dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai. Umumnya mikrokontroler memiliki instruksi manipulasi bit, akses ke I/O secara langsung serta proses interupsi yang cepat dan efisien. Penggunaan mikrokontroler sudah banyak ditemui dalam berbagai peralatan elektronik, seperti telepon digital, microwave oven, televisi, dan lain-lain. Mikrokontroller juga dapat digunakan untuk berbagai aplikasi dalam industri seperti: sistem kendali, otomasi, dan lain-lain.
Atmega 2560 merupakan mikrokontroller 8 bit berbasis arsitektur RISC (Reduced instruction Set Computing) dimana set instruksinya dikurangi baik dari segi ukurannya maupun kompleksitas mode pengalamatannya. Satu instruksi biasanya berukuran 16 bit dan sebagian besar dieksekusi dalam 1 siklus clock.
B. Konfigurasi Pin Atmega 2560
Konfigurasi Pin Arduino Mega 2560 Menurut Dian Artanto (2008:34) dalam arifin dkk[29], Konfigurasi pin mikrokontroller ATmega 2560 adalah sebagai berikut:
C. Skema pin ATmega 2560
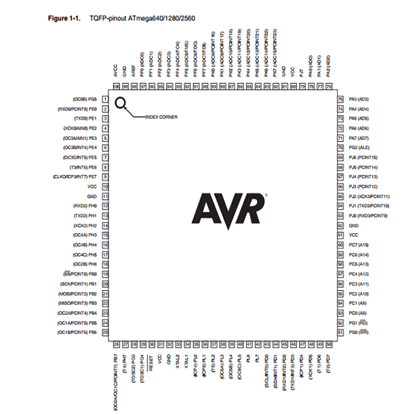
Gambar 2.18. Konfigurasi pin arduino mega 2560
Arduino Mega 2560
A. Definisi Arduino
Arduino adalah platform pembuatan prototype elektronik yang bersifat open-source hardware yang berdasarkan pada perangkat keras dan perangkat lunak yang fleksibel dan mudah digunakan. Arduino ditujukan bagi para seniman, desainer, dan siapapun yang tertarik dalam menciptakan objek atau lingkungan yang interaktif. Menurut Sulaiman (2012:1) dalam Arifin dkk, Arduino merupakan platform yang terdiri dari software dan hardware. Hardware Arduino sama dengan microcontroller pada umumnya hanya pada arduino ditambahkan penamaan pin agar mudah diingat. Software Arduino merupakan software open source sehingga dapat di download secara gratis. Software ini digunakan untuk membuat dan memasukkan program ke dalam Arduino. Pemrograman Arduino tidak sebanyak tahapan mikrokontroller konvensional karena Arduino sudah didesain mudah untuk dipelajari, sehingga para pemula dapat mulai belajar mikrokontroller dengan Arduino.
B. Perangkat Keras Arduino Mega 2560
Menurut Feri Djuandi (2011:8) dalam arifin dkk, Komponen utama didalam papan Arduino adalah sebuah 8 bit dengan merk ATmega yang dibuat oleh Atmel Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega2560.
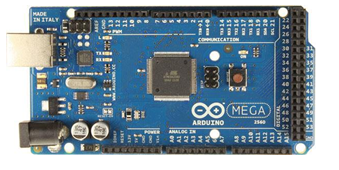
Sumber: jurnal arifin dkk
Gambar 2.19. Ardino mega 2560.
Tabel 2.4. Spesifikasi board Arduino Mega
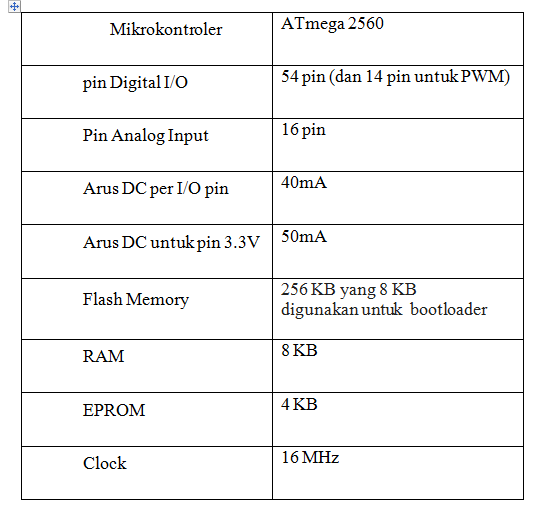
C. Sumber Catu Daya
Menurut Feri Djuandi (2011:10) dalam arifin dkk, Arduino Mega dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih secara otomatis. Sumber daya eksternal (non-USB) dapat berasal baik dari adaptor AC-DC atau baterai. Adaptor dapat dihubungkan dengan mencolokkan steker 2,1 mm yang bagian tengahnya terminal positif ke ke jack sumber tegangan pada papan. Jika tegangan berasal dari baterai dapat langsung dihubungkan melalui header pin Gnd dan pin Vin dari konektor POWER. Papan Arduino mega2560 dapat beroperasi dengan pasokan daya eksternal 6 Volt sampai 20 volt. Jika diberi tegangan kurang dari 7 Volt, maka, pin 5 Volt mungkin akan menghasilkan tegangan kurang dari 5 Volt dan ini akan membuat papan menjadi tidak stabil. Jika sumber tegangan menggunakan lebih dari 12 Volt, regulator tegangan akan mengalami panas berlebihan dan bisa merusak papan. Rentang sumber tegangan yang dianjurkan adalah 7 Volt sampai 12 Volt.
pin tegangan yang tersedia pada Arduino adalah:
D. Memory
Arduino ATmega 2560 memiliki 256 KB flash memory untuk menyimpan kode (yang 8 KB digunakan untuk bootloader), 8 KB SRAM dan 4 KB EEPROM (yang dapat dibaca dan ditulis dengan perpustakaan EEPROM).
Operating System Andriod
A. Definisi Android
Menurut Wahadyo (2013:2)[30], Android adalah sistem operasi disematkan pada gadget, baik itu handphone, tablet, juga sekarang sudah merambah ke kamera digital dan jam tangan.
Menurut Nasruddin safaat (2012:1)[31] , Android adalah sistem operasi untuk telepon seluler yang berbasis Linux. Android menyediakan platform terbuka bagi para pengembang buat menciptakan aplikasi mereka sendiri untuk digunakan oleh bermacam piranti bergerak.
Berdasarkan beberapa pendapat diatas dapat disimpulkan bahwa Android adalah sistem operasi untuk perangkat handphone, tablet dan perangkat lainnya.
B. Sejarah Android
Android menyediakan platform terbuka bagi para pengembang untuk menciptakan aplikasi mereka sendiri untuk digunakan oleh bermacam peranti bergerak .Awalnya Google Inc membeli Android Inc., pendatang baru yang membuat peranti lunak untuk ponsel. Kemudian untuk mengembangkan Android, dibentuklah Open Handset Alliance, konsorsium dari 34 perusahaan peranti keras, peranti lunak, dan telekomunikasi, termasuk Google, HTC, Intel, Motorola, Qualcomm, T-Mobile, dan Nvidia.
Di dunia ini terdapat dua jenis distributor sistem operasi Android. Pertama yang mendapat dukungan penuh dari Google atau Google Mail Services (GMS) dan kedua adalah yang benar–benar bebas distribusinya tanp adukungan langsung Google atau dikenal sebagai Open Handset Distribution (OHD).
Fitur-fitur yang dimiliki android adalah:
kompenen Elektronika
A. Resistor
Menurut jaelani dalam jurnal Teknik Elektro dan Komputer (2016:2)[32]. “Resistor atau Tahanan adalah komponen elektronika yang berfungsi untuk mengatur kuat arus yang mengalir. Lambang untuk Resistor dengan huruf R, nilainya dinyatakan dengan cincin-cincin berwarna dalam OHM (Ω). pada teknik listrik dan elektronika terdapat dua macam resistor yang sering digunakan yaitu resistor tetap dan resistor variabel”.
Resistor tetap merupakan resistor yang mempunyai nilai hambatan tetap. Biasanya terbuat dari karbon, kawat atau panduan logam. Pada resistor tetap nilai Resistansi biasanya ditentukan dengan kode warna dan dapat dilihat pada gambar 2.20, 2.21, dan 2.22.
Resistor adalah komponern elektronik dua kutub yang di desain untuk menahan arus listrik dengan memproduksi tegangan listrik diantara kedua kutubnya, nilai tegangan terhadap resistansi berbanding lurus dengan arus yang mengalir berdasarkan Hukum Ohm.
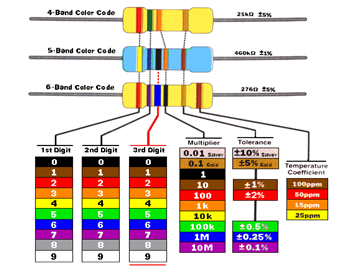
Gambar 2.20. Warna Gelang Resistor

Gambar 2.21. Resistor
Gambar 2.22.Simbol Resistor.
B. Catu Daya
Catu daya merupakan bagian yang penting dalam pembuatan perangkat keras. Tanpa adanya catu daya maka semua rangkaian tidak akan bekerja. Kebanyakan catu daya yang digunakan sekarang didayai oleh sumber arus bolak – balik
(AC) 110 Volt atau 220 Volt, dengan frekuensi berkisar antara 50 sampai 60 Hertz (Hz). Sumber AC ini dimasukan ke bagian input transformator sehingga menghasilkan tegangan output AC yang besarnya tergantung jumlah lilitan sekunder, jumlah lilitan primer dan besarnya tegangan primer trafo. Tegangan output dari trafo sekunder akan menentukan tegangan output DC akhir dari catu daya setelah penyetelan dan filter dipasang.
C. Rangkaian Power Supply
Pada rangkaian power supply ini menggunakan komponen dioda sebagai penyearah gelombang AC menjadi DC yang kemudian akan di filterisasi oleh kapasitor 3300 µf/25V, 2,2 µf/50V dan Dioda 1N4007 yang akan membuat ripple golambang makin kecil.Gambar di bawah ini adalah skema rangkaian catu daya dengan menggunakan transformator CT 3A.
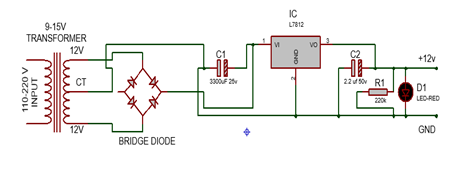
Gambar 2.23.Rangkaian power supplay 24v.
D. Regulasi Tegangan
Regulasi atau pengaturan bertujuan untuk mengatur suatu besaran agar berada pada nilai tertentu. Tegangan catu daya DC yang berbasis sebuah pengatur tegangan rangkaian terpadu 3 terminal, akan memberikan kinerja yang sangat baik dalam hal resistansi output dan pengaturan tegangan. Sebagai tambahan perangkat semacam ini biasanya menyertakan proteksi arus lebih dan dapat bertahan terhadap arus hubung singkat yang tersambung langsung kepada terminal – terminal output-nya. Hal ini merupakan fitur yang sangat penting dalam aplikasi praktis. (Tooley, 2003) dalam jurnal jaelani.
regulasi tegangan untuk catu daya sangat dibutuhkan, berbagai jenis IC yang memenuhi kebutuhan ini. Salah satu IC adalah seri 78XX yang simbolnya dapat dilihat pada gambar. XX menunjukan tegangan keluaran dari IC tersebut. Simbol IC Regulator dapat dilihat pada Gambar 2.24.
IC 78XX mempunyai tiga kaki, satu untuk Vin, satu untuk Vout, dan satu sambungan lagi untuk GND. Sambungan tersebut diperlihatkan dalam gambar 2.26. dalam IC ini selain rangkaian regulasi tegangan juga sudah terdapat rangkaian pengaman yang akan melindungi IC dari arus atau daya yang terlalu tinggi. Terdapat pembatasan arus yang mengurangi tegangan keluaran kalau batas arus terlampaui. Juga terdapat pengukuran suhu yang mengurangi arus maksimal kalau suhu IC menjadi terlalu tinggi. Dengan rangkaian pengaman ini, IC terlindungi dari kerusakan akibat beban yang terlalu besar. (Wasito, 1987) dalam jurnal jaelani. Gambar Regulagi Tegangan Menggunakan IC 78XX dapat dilihat pada gambar 2.25.
Gambar 2.24. IC L7812CV.
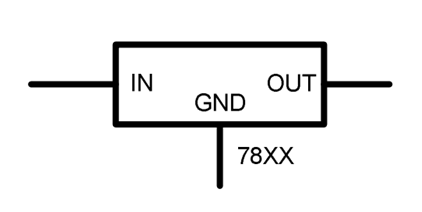
Sumber : E-Journal Teknik Elektro dan Komputer vol. 5 no. 1, Januari – Maret 2016. Rancang Bangun Rumah Pintar Otomatis Berbasis Sensor Suhu, Sensor Cahaya, Dan Sensor Hujan
Gambar 2.25. Simbol IC Regulator.
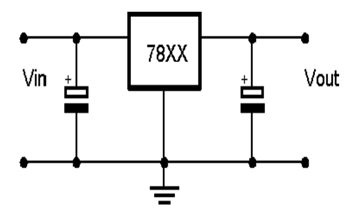
Sumber : E-Journal Teknik Elektro dan Komputer vol. 5 no. 1, Januari – Maret 2016. Rancang Bangun Rumah Pintar Otomatis Berbasis Sensor Suhu, Sensor Cahaya, Dan Sensor Hujan
Gambar 2.26. Regulasi Tegangan Menggunakan IC 78XX.
E. Kapasitor Elco
Kapasitor elektrolit mempunyai polaritas positif (+) dan negatif (-). Oleh karena memiliki polaritas, kapasitor ini sering di sebut dengan kapasitor. Nilai kapasitas kapasitor jenis ini dinyatakan dalam satuan mikro farad (µF). Besarnya kapasitas dari kapasitor biasanya sudah tertulis pada body kapasitor termasuk dengan batas tegangan maksimum (working voltage). Kapasitor ini banyak dipergunakan sebagai filter dalam rangkaian rectifier.

Sumber : E-Journal Teknik Elektro dan Komputer vol. 5 no. 1, Januari – Maret 2016. Rancang Bangun Rumah Pintar Otomatis Berbasis Sensor Suhu, Sensor Cahaya, Dan Sensor Hujan
Gambar 2.27. kapasitor elco 3300uf/25v.
F. Lampu LED
Menurut Alfith di dalam Jurnal Momentum (ISSN: 1693-752X) Vol. 17, No. 1 (2015:3)[33]. “LED merupakan komponen aktif bipolar semikonduktor, karena itu hanya mampu mengalirkan arus dalam satu arah saja. Untuk menyalakan LED, cukup dengan mengalirkan arus dari anoda ke katoda dengan beda potensial minimum berkisar antara 1,5 hingga 2 dan arusnya berkisar di 20mA. Bentuk fisik dari lampu led dapat dilihat pada gambar 2.28 sebagai berikut :

Sumber : Alfith (2015:3)
Gambar 2.28. Lampu Led.
Led (light emitting diode) merupakan lampu yang akhir-akhir ini muncul dalam kehidupan kita. Led dulu umumnya digunakan pada gadget seperti ponsel serta komputer. Sebagai pesaing lampu bolham dan nen, saat ini aplikasinya mulai meluas dan bahkan kita bisa temukan pada korek api yang kita gunakan. Led sebagai model lampu masa kedepan dianggap dapat menekan pemanasan global karena efisiennya.
G. Transformator
Transformer adalah suatu alat listrik yang dapat memindahkan dan mengubah energi listrik dari satu atau lebih rangkaian listrik ke rangkaian listrik yang lain, melalui suatu gandengan magnet dan berdasarkan prinsip induksi elektromagnetik.Trafo satu fasa sama seperti trafo pada umumnya hanya penggunaannya untuk kapasitas kecil Frekuensi pada kumparan primer dan kumparan sekunder adalah sama,
Tegangan dan arus pada kumparan primer dan kumparan sekundr dapat diubah ubah sesuai dengan yang dikehendaki.Transformator merupakan suatu peralatan listrik elektromagnetik statis yang berfungsi untuk memindahkan dan mengubah daya listrik dari suatu rangkaian listrik ke rangkaian listrik lainnya,dengan frekuensi yang sama dan perbandingan transformasi tertentu melalui suatu gandengan magnet dan bekerja berdasarkan prinsip induksi
elektromagnetis,dimana perbandingan tegangan antara sisi primer dan sisi sekunder berbanding lurus dengan perbandingan jumlah lilitan dan berbanding terbalik dengan perbandingan arusnya.
Gambar 2.29. Transformer CT 3A
H. Dioda Zener
Menurut Wikipedia[34]. “Diode yang memiliki karakteristik menyalurkan arus listrik mengalir ke arah yang berlawanan jika tegangan yang diberikan melampaui batas "tegangan tembus" (breakdown voltage) atau "tegangan Zener". Ini berlainan dari diode biasa yang hanya menyalurkan arus listrik ke satu arah.”
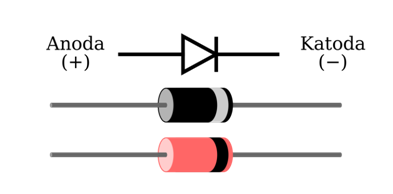
Gambar 2.30. Dioda Zener
I. Konsep Dasar Relay
Menurut Miller (2013:24)[35], "A relay is a device that can control current from a remote position through the use of a separate circuit for its own power. when the switch is closed. current flows through the electromagnet, or coil, and energizes it. The pull of the electromagnet causes the soft iron armature to be attracted toward the electromagnet core. As the armature moves toward the coil, it touches the contacts of other circuits. Thereby completing the circuit for the load. When a switch opens. The relay coil de-energizes, and the spring pulls the armature back. This action breaks the contact and removes the load from the 12-V battery, Relays are remote switches that can be controlled from almost any distance if the coil is properly wired to its power source. Many types of relays are available. They are used in telephone circuits and in almost all automated. electrical machinery".
Relay adalah perangkat yang dapat mengontrol arus dari posisi jauh melalui penggunaan sirkuit terpisah untuk kekuatan sendiri. ketika saklar ditutup. arus mengalir melalui elektromagnet, atau coil, dan memberikan energi itu. Tarikan elektromagnet menyebabkan angker besi lunak menjadi tertarik ke arah inti elektromagnet. Sebagai angker bergerak menuju kumparan, menyentuh kontak sirkuit lainnya. sehingga melengkapi rangkaian untuk beban. Ketika switch terbuka. kumparan relay tidak memberikan energi, dan musim semi menarik armature kembali. tindakan ini istirahat kontak dan menghilangkan beban dari baterai 12- V, Relay jarak jauh switch yang dapat dikendalikan dari jarak hampir apapun jika kumparan dengan benar kabel ke sumber listrik.Banyak jenis relay yang tersedia. Mereka digunakan dalam sirkuit telepon dan di hampir semua otomatis.
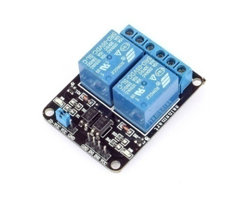
Gambar 2.31. Relay 2 Channel.
1. Komponen Penyusun Relay
Berikut adalah komponen-komponen penyusun relay:
Koil/kumparan merupakan komponen utama sebuah relay yang digunakan untuk menciptakan medan magnet (elektromagnetik).
Input Relay merupakan bagian kontrol relay. Relay membutuhkan tegangan masukan (VDC) untuk dapat mengoperasikan kumparan.
Common Relay merupakan bagian keluaran relay yang tersambung dengan Normally Closed (NC) dalam keadaan normal.
Normally Closed (NC) merupakan bagian sakelar relay yang dalam keadaan normal ( relay tidak diberi tegangan) terhubung dengan common relay.
Normally Open (NO) merupakan bagian sakelar relay yang dalam keadaan normal (relay tidak diberi tegangan) tidak terhubung dengan common relay.
2. Jenis-Jenis Relay
Relay yang ada dipasaran terdapat bebarapa jenis sesuai dengan desain yang ditentukan oleh produsen relay. Dilihat dari desain saklar relay maka relay dibedakan menjadi:
Software Arduino IDE
Menurut Djunadi (2011:12)[36]. “Software Arduino adalah sebuah Integrated Development Environment (IDE) yang sangat canggih ditulis dengan menggunakan bahasa Java sehingga tidak perlu diinstal seperti software pada umumnya tapi dapat langsung dijalankan selama komputer yang digunakan sudah terinstal Java Runtime. IDE Arduino terdiri dari :
Berikut ini adalah gambar tampilan IDE Arduno :

Sumber : E-book Pengenalan Arduino Feri Djunadi (2011:12)
Gambar 2.32. Tampilan IDE Arduino 1.0.
Motor Stepper
A. Motor Stepper Dua-Phase (Bipolar)
Menurut syahrul (2014:615)[37], Motor stepper dua-phase memiliki konstruksi yang mirip dengan jenis unipolar, hanya tidak terdapat tab pada kumparannya, untuk mengatur agar motor ini dapat berputar dalam dua arah diperlukan sebuah driver motor yang dikenal dengan nama H bridge. Sirkuit ini akan mengontrol setiap kumparan secara terpisah termasuk polaritas untuk setiap kumparannya.
Cara yang paling sederhana dalam memberikan step pada motor ini adalah dengan memberikan energi secara bergantian pada AB atau CD untuk menarik rotor dari kutup ke kutup. Jika rotor bergerak CCW (counter clockwise, berlawanan arah jarum jam), dari posisi 1, maka sirkuit CD harus diberi energi dengan polaritas C+ D-, hal ini akan menarik rotor keposisi 2. Selanjutnya, sirkuit AB diberi energi lagi, tetapi kali ini polaritasnya terbalik A- B+, yang menyebabkan kutub bawah memberikan unjung utara pada motor, dengan demikian rotor tertarik ke posisi 3. Istilah bipolar digunakan pada motor ini karena arus kadang-kadang terbalik. Uruttan tegangan diperlukan untuk memutar motor satu putaran penuh, pembacaan dari atas kebawah memberikan urutan untuk peralihan/perputaran CCW, pembacaan dari bawah ke atas urutan CW (clockwise, searah jarum jam):
Tabel 2.5. Urutan Empat Step Searah Jarum Jam.
B. Pengontrolan Motor Stepper Bipolar
Pengontrolan motor stepper memerlukan polaritas terbalik, pada gambar dibawah menunjukan sebuah motor stepper bipolar memeiliki sirkuit yang disimbolkan dengan AB dan CD, diagram pewaktuan diperlukan untuk A,B,C,dan D (rotasi CCW). Dengan melihat posisi kolom satu kebawah pada gambar 2.33(b), melihat A adalah positif dan B negative, sehingga arus akan mengalir dari A ke B dalam sirkuit AB. Sementara C dan D keduanya negative, yang secara efektif mematikan sirkuit CD, untuk posisi dua pada timing diagram, C adalah posistif dan D negative, yang menyebabkan arus mengalir dari C ke D dalam sirkuit CD, sedangkan kumparan AB mati dan seterusnya.
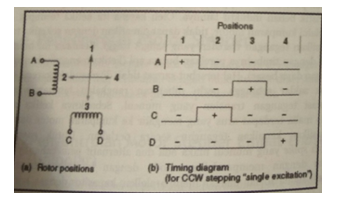
Sumber : syahrul pemograman mikrokontroler avr (2014:624)
Tabel 2.33. Operasi motor Stepper bipolar.
Teori Dasar Motor DC
A. Motor DC
Menurut Nikhil Tripatih, Rameshwar Singh, Renu yadav pada International Research Journal of Engineering and Technology (Vol.02, Issue.08, 2015)[38], Direct current (DC) motors have variable characteristics and are usedextensively in variable-speed drives. DC motor can provide a high starting torque and it is also possible to obtain speed control over wide range.
(Arus searah (DC) motor memiliki karakteristik variabel dan digunakan secara luas dalam variabel kecepatan drive. Motor DC dapat memberikan torsi awal yang tinggi dan juga memungkinkan untuk memperoleh kontrol berbagai kecepatan lebih.).
Menurut syahrul (2014:593)[37], “sirkuit internal motor DC terdiri dari kumparan/lilitan konduktor. Setiap arus yang mengalir melalui sebuah konduktor akan menimbulkan medan magnet. Konduktor dibentuk menjadi sebuah loop sehingga ada dua bagian konduktor yang berada didalam medan magnet pada saat yang sama. Seperti yang di tunjukan pada gambar 2.34 konfigurasi konduktor seperti ini akan menghasilkan distorsi pada medan magnet utama dan menghasikan gaya dorong pada masing-masing konduktor. Pada saat konduktor ditempatkan pada rotor, gaya dorong yan timbul akan menyebabkan rotor berputar searah jarum jam”.
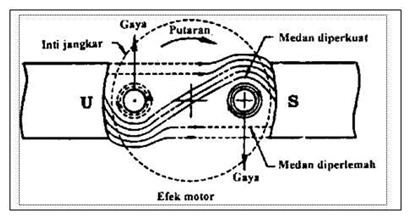
Tabel 2.34. Prinsip Pergerakan Motor.
B. Konstruksi Motor DC
Pada saat terminal motor diberi tegangan DC maka arus electron maka akan mengalir melalui konduktor dari terminal negative menuju ke terminal positif. Karena konduktor berada berada di antara medan magnet. Maka akan timbul medan magnet juga pada konduktor.
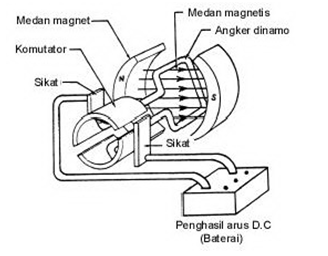
Tabel 2.35. Konstruksi dasar motor dc.
Konsep Dasar Bluetooth
A. Definisi Bluetooth
Menurut Yogyo Susaptoyono (2012:5)[39], "Bluetooth adalah teknologi yang memungkinkan dua perangkat yang kompatibel, seperti telepon dan PC untuk berkomunikasi tanpa kabel dan tidak memerlukan koneksi saluran yang terlihat. Teknologi ini memberikan perubahan yang Bluetooth sesungguhnya merupakan spesifikasi industri untuk jaringan wilayah pribadi nirkabel (WPAN). Bluetooth menfasilitasi koneksi dan pertukaran informasi di antara alat-alat seperti PDA, ponsel, komputer laptop, printer, dan kamera digital melalui frekuensi radio jarak dekat".
B. Sejarah Bluetooth
Nama Bluetooth sendiri diambil dari nama seorang raja di Denmark yang bertakhta pada abad ke 10, yakni raja Harald Bluetooth. Pada masa hidupnya, raja tersebut aktif berdiplomasi memfasilitasi perundingan-perundingan untuk mendamaikan pihak-pihak yang bersengketa. Para penemu teknologi Bluetooth menganggap nama belakang raja tersebut sesuai dengan sifat teknologi nirkabel itu. Spesifikasi Bluetooth pertama kali dikembangkan oleh Ericsson, yang saat ini menjadi Sony Ericsson dan Ericsson mobile Platforms. Bluetooth kemudian diresmikan oleh Special Interest Group (SIG), yang berdiri pada 20 mei 1999. organisasi terssebut didirikan oleh Sony Ericsson, IBM, Intel, Toshiba dan Nokia. Sebagai standar radio dan protokol komunikasi, Bluetooth dirancang untuk bekerja hemat daya, dengan daya jangkau pendek, berbasis transceiver microchip murah. Untuk mengamankan komunikasi dari penyadapan, Bluetooth mengandalkan algoritma SAFER+ untuk otentikasi dan pembuatan kunci. Sementara itu, enkripsi paket data dipercayakan pada teknologi E0 StreamChipher.
C. Versi Bluetooth
Versi-versi pertama adalah Bluetooth 1.0 dan Bluetooth 1.0 B. Perbaikan terus dilakukan dengan kelahiran Bluetooth 1.1 . Versi ini antara lain mendukung untuk channel yang tidak dapat terenkripsi. Berikutnya tercipta Bluetooth 1.2 yang memiliki kecepatan transmisi lebih tinggidan lebih tahan terhadap interferensi frekuensi radio. Dan versi terbaru yang baanyak diadopsi gadget-gadget muthakhir pada saat ini adalah Bluetooth 2.0. Signifikan terhadap peralatan elektronik yang kita gunakan. Bluetooth memperbaiki penggunaan teknologi kabel yang cenderung menyulitkan ini dengan cara menghubungkan beberapa peralatan tanpa menggunakan kabel.
D. Cara Kerja Bluetooth
Bluetooth beroperasi dalam pita frekuensi 2,4 GHz (antara 2.402 GHz sampai 2.480 GHz) yang mampu menyediakan layanan komunikasi data dan suara secara real-time antara host to host Bluetooth dengan jarak jangkauan layanan yang terbatas. Bluetooth dapat berupa card yang bentuk dan fungsinya hampir sama dengan card yang digunakan untuk wireless local area network (WLAN) di mana menggunakan frekuensi radio standar IEEE 802.11 , hanya saja pada bluetooth mempunyai jangkauan jarak layanan yang lebih pendek dan kemampuan transfer data yang lebih rendah. Pada dasarnya bluetooth diciptakan bukan hanya menggantikan atau menghilangkan penggunaan kabel di dalam melakukan pertukaran informasi, tetapi juga mampu menawarkan fitur yang baik untuk teknologi mobile wireless dengan biaya yang relatif rendah, konsumsi daya yang rendah, interoperability yang menjanjikan, mudah dalam pengoperasian dan mampu menyediakan layanan yang bermacam-macam. Bluetooth bekerja menggunakan frekuensi radio. Beda dengan inframerah yang mendasarkan diri pada gelombang cahaya. Jaringan Bluetooth bekerja pada frekuensi 2.402 Giga Hertz sampai dengan 2.480 Giga Hertz. Dibangkitkan dengan daya listrik kecil sehingga membatasi daya jangkaunya hanya sampai 10 meter. Penetapan frekuensi ini telah distandardisasi secara internasional untuk peralatan elektronik yang dipakai untuk kepentingan industri, ilmiah, dan medis. Kecepatan transfer data Bluetooth rilis 1.0 adalah 1 megabit per detik(Mbps), sedangkan versi 2.0 mampu menangani pertukaran data hingga 3 Mbps. Sepasang peralatan Bluetooth yang telah tersambung akan membentuk Personal Area Network, disebut juga piconet dan mengacak frekuensi. Akan terjadi transaksi dan percakapan antar peralatan secara otomatis apakah ada data yang hendak dipertukarkan dan pihak manakah yang akan mengontrol komunikasi. Jika dikaitkan dengan masalah keamanan data, maka dapat dikatakan bahwa banyak hal yang perlu mendapat perhatian ekstra pada penggunaan Bluetooth. Koneksi antar peralatan Bluetooth tidak memerlukan campur tangan dari pengguna, melainkan terjadi secara otomatis. Begitu peralatan Bluetooth terdeteksi dan koneksi terbentuk, maka siapa saja dapat mengirimkan data ke peralatan Bluetooth. Beberapa manufaktur peralatan mobile saat ini telah mulai menerapkan teknologi secure Bluetooth, yaitu dengan menggunakan password pada perangkat Bluetooth tersebut.
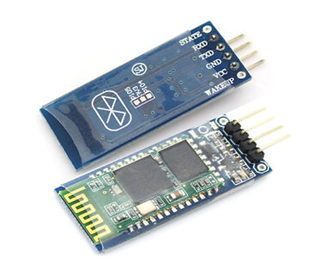
Tabel 2.36. Bluetooth HC-06
Driver IC L298
Menurut Arifianto (2011:54)[39], “motor driver adalah rangkaian elektronik yang berfungsi untuk memperkuat arus dan tegangan yang di butuhkan oleh motor.Jika suplai arus teegangan kecil, motor tidak akan berputar secara maksimal”.
Motor driver IC L298 memiliki fungsi yaitu sebagai pengendali motor. Dalam IC ini juga terdapat dua buah pengendali yang dapat digunakan untuk mengendalikan dua buah motor. IC L298 mampu mengalirkan arus hingga 4A, sehinggal IC L298 mampu menggerakan motor yang lebih besar.
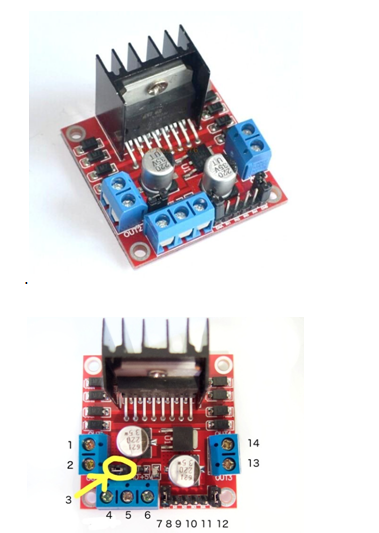
Tabel 2.37. IC driver.
A. Pin Output pada l298n
Konsep Dasar Literature Review
A. Definisi Literature Review
Menurut Suryo Guritno, Sudaryono dan Untung Rahardja (2011:86)[26], “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama.
Jadi, kesimpulannya adalah bahwa Literature Review ada berbagai penelitian yang sudah di buat oleh orang lain.
Literature Review
Menurut Suryo Guritno, Sudaryono dan Untung Rahardja (2011:86)[26], “Literature Review dalam suatu penelitian adalah mengetahui apakah para peneliti laintelah menemukan jawaban untuk pertanyaan-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama. Beberapa Literature review tersebut adalah sebagai berikut:
1. Penelitian yang dilakukan oleh Thomas Priyasmanu, M. Hari Tiono dari INSTITUT TEKNOLOGI NASIONAL MALANG yang berjudul “Perancangan Alat Pencuci Gelas Semi Otomatis Dengan Menggunakan Prinsip Ergonomi” Tahun 2013. Dimana sistem ini menggunakan sebuah motor berarus DC, motor DC ini disambungkan dengan sebuah sikat yg nantinya jika sebuah tombol di tekan sikat tersebut akan memutar, perancangan ini guna memperhemat waktu pada saat pencucian.
2. Penelitian yang dilakukan oleh Hermawati, Bhakti Yudho Suprapto, Andi Pranata, dan Firmansyah dari JURUSAN TEKNIK ELEKTRO, UNIVERSITAS SRIWIJAYA yang berjudul “Purwarupa Pembersih Pipa Otomatis (Automatic Tube Remover) pada Heat Exchanger Menggunakan Teknik Pengolahan Citra” tahun 2015. System ini menggunakan mikrokontroler ATmega16 dan software yang digunakan Matlab R2013a. dan menggunakan LCD serta driver motor. Fungsi LCD disini guna menginformasikan data string oleh mikrokontroler dimulai dengan menampilkan data string yang diterima oleh mikrokontroler ke LCD kemudian diikuti dengan bergeraknya motor penggerak overhead crane menuju titik koordinat sesuai data string yang diterima yang langsung dikonversi sebagai koordinat lubang. Jika motor penggerak overhead crane telah mencapai titik-titik koordinat (koordinat titik x, dan koordinat titik y) yang sesuai data string maka motor overhead crane akan berhenti secara otomatis dan barulah proses pelepasan sisa tabung yang berada di tubesheet akan dilepaskan oleh pneumatic.
3. Penelitian yang dilakukan oleh Budi Satria, Hendra Wijaya, Rudy Susanto dari UNIVERSITAS BINA NUSANTARA yang berjudul “Robot Pembersih Debu Otomatis” tahun 2012. rancang pembersih debu berbasiskan mikrokontroler AT89S52 yang menggunakan empat buah sensor ultrasonik dan driver motor EMS 1A dual H-bridge. Hasil yang diperoleh dari penelitian ini adalah sistem mobile robot yang memiliki kemampuan untuk pembersihan debu secara per kolom yaitu membersihkan dari bawah keatas dan berputar ke kanan dengan kondisi roda kanan diam dan roda kiri akan berputar hingga 180% dan dari atas robot akan jalan turun ke bawah dan melakukan putaran ke kiri dengan roda kanan berputar 180% dan roda kiri diam.
4. Penelitian yang dilakukan oleh aan supriyanto dari STMIK RAHARJA Tangerang yang berjudul “prototype robot pembersih sampah waduk otomatis dan smartphone control berbasi arduino” tahun 2015. Rancang bangun menggunakan arduino mega dengan mikrokontroler ATmega 2560 pengontrolannya dengan smartphone guna mengontrol servo-servo sebagai lengan dan motor dc sebagai penggerak nya, dengan sensor yang di tanam pada rakitannya, maka apabila ada benda yang menghalanginya di depan robot tersebut akan berhenti.
5. Penelitian yang dilakukan oleh Reza Nursyah Putra dari jurusan sistem komputer STMIK RAHARJA TANGERANG yang berjudul “prototype alat pembersih toren otomatis menggunakan sms gateway pada pt.cahaya televise indonesia ”. Tahun 2014. Proses sms gateway akan mulai bekerja ketika motor dc dalam kondisi = 1 atau menyala. Maka sms gateway akan memberikan informasi kepada pengguna bahwa toren akan dibersihkan. Ketika motor dc = 0 maka sms gateway akan memberkan informasi bahwa toren selesai dibersihkan. motor dc digunakan bertujuan agar dapat membantu pergerakan dari as ulir untuk berputar mengelilingi dinding toren.
Dari beberapa literature review diatas, dapat diketahui bahwa penelitian mengenai mikrokontroller, dc motor, servo. Mengenai kebersihan sudah banyak dibahas. Untuk itu saya melakukan sebuah untuk menutupi beberapa kekurangan dari penelitian yang sudah ada. Seperti yang di ketahui saat ini kemajuan teknologi sudah berkembang pesat. Maka dari itu di buatlah sebuah penelitian “Prototype Alat Pembersih Bak Mandi Menggunakan Media Smartphone Berbasis Arduino Mega 2560 pada Kantor Kecamatan Balaraja”.
BAB III
Gambaran Umum Dinas Pertanian Dan Ketahanan Pangan
Dinas Ketahanan Pangan, Pertanian dan Perikanan (sebelumnya nomenklatur dinas adalah Dinas Pertanian dan Ketahanan Pangan) merupakan perangkat daerah yang melaksanakan urusan pangawn, pertanian dan kelautan dan perikanan sesuai dengan Peraturan Daerah Kota Tangerang Selatan Nomor 8 Tahun 2016 tentang Organisasi Perangkat Daerah. Pada saat Renstra ini disusun, belum ditetapkan Peraturan Walikota Tangerang Selatan tentang Tugas Pokok, Fungsi dan Tata Kerja Dinas Ketahanan Pangan, Pertanian dan Perikanan Kota Tangerang Selatan. Sehingga tugas, fungsi dan susunan organisasi yang diuraikan merupakan rancangan Peraturan Walikota Tangerang Selatan yang sedang proses penetapan.
Sejarah Singkat Dinas Pertanian Dan Ketahanan Pangan
Dinas pertanian ini didirikan setelah tangerang selatan memisahkan diri untuk menjadi membentuk daerahnya sendiri dikarenakan dengan luasnya wilayah yang ada dan besarnya jumlah penduduk, pelaksanaan pembangunan dan pelayanan masyrakat belum sepenuhnya terjangkau, oleh sebab itu pada 26 november tahun 2008 dibuatlah suatu daerah bernama Tangerang Selatan, dan dinas pertanian dan ketahanan pangan ini di dibuat guna untuk memberikan pelayanan terhadap masyarakat pada bidang Pertanian, perikanan, dan ketahanan Pangan.
Dinas Ketahanan Pangan, Pertanian dan Perikanan sebagaimana dimaksud mempunyai tugas membantu Walikota melaksanakan Urusan Pemerintahan yang menjadi kewenangan daerah dan tugas pembantuan yang diberikan kepada Pemerintah Daerah.
fungsi:
Struktur Organisasi perusahaan
Struktur Organisasi merupakan kerangka yang menggambarkan hubungan antar bagian yang terkait dalan suatu organisasi seperti pembagian kerja ke dalam kelompok-kelompok tugas dan tanggung jawab.
Struktur organisasi akan tergantung pada tujuan tahap perkembangan organisasi dan kemampuan sumber-sumbernya yang mendukung pada bidang-bidang pekerjaan masing-masing dalam kesatuan fungsional. Dalam suatu perusahaan ataupun organisasi struktur organisasi merupakan hal yang sangat penting karena dengan memiliki struktur organisasi yang baik, fungsi-fungsi managemen akan dapat dijalankan dengan baik dan lancar. Organisasi merupakan kesatuan aktifitas dimana para pemimpin mempunyai wewenang untuk mengkoordinasikan kegiatan dengan maksud untuk mencapai tujuan organisasi.
Dengan organisasi yang efektif, maka setiap bagian organisasi mengetahui wewenang dan tugas yang menjadi tanggung jawabnya masing-masing. Dengan demikian hubungan kerja dalam organisasi akan dapat dikoordinasikan dengan baik. Struktur organisasi tercermin dalam suatu bagan organisasi yang menunjukkan adanya pembagian tugas dan wewenang serta aturan dan prosedur yang ada termasuk komunikasi dan arus kerja. Susunan dan struktur Dinas Pertanian Dan Ketahanan Pangan dapat dilihat pada gambar di halaman berikut ini :
struktur organisasi dinas Pertanian Dan Ketahanan Pangan
Tugas Dan Tanggung Jawab
Dari struktur organisasi di atas maka dapat kita lihat tugas maupun fungsi dari masing-masing bagian jabatan di Dinas Pertanian Dan Ketahan Pangan:
Adalah orang yang mempunyai tugas pokok memimpin, mengatur, mengkordinasikan dan mengendalikan seluruh kegiatan penyelenggaraan tugas dan fungsi dinas sesuai dengan visi dan misi walikota dalam lingkup urusan pertanian, peternakan dan ketahanan pangan sebagaimana di jabarkan dalam rencana pembangunan jangka menengah daerah
Adalah orang yang mempunyai tugas pokok membantu kepala dinas dalam pengkoordinasikan pelaksanaan dalam kebijakan penyelenggaraan tugas dan fungsi dinas serta menyelenggaraan kegiatan di bidang adminstrasi umum, kepegawaian, keuangan, Dan perencanaan.
Sub bagian umum dan kepegawaian dipimpin oleh seorang kepala sub bagian yang mempunyai tugas pokok melaksanakan sebagian tugas dan fungsi sekertariat di bidang adminstrasi umum dan adminstrasi kepegawaian. Seperti halnya penyusunan rencana kerja dan annggaran tahunan sub bagian umum dan kepegawaian
Sub bagian keuangan dipimpin oleh seorang kepala sub bagian yang mempunyai tugas pokok melaksanakan sebagian tugas dan fungsi sekertariat di bidang Keuangan. Seperti halnya penyusunan usulan kerja dan anggaran tahunan Sub bagian keuangan
Sub bagian perencanaan dipimpin oleh seorang kepala sub bagian yang mempunyai tugas pokok melaksanakan sebagian tugas dan fungsi sekertariat di bidang perencanaan. Seperti halnya penyusunan usulan program dan rencana kerja tahunan Dinas.
Sub bagian perencanaan dipimpin oleh seorang kepala sub bagian yang mempunyai tugas pokok melaksanakan sebagian tugas dan fungsi sekertariat di bidang perencanaan. Seperti halnya penyusunan usulan program dan rencana kerja tahunan Dinas.
Seksi Pertanian dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas merencanakan,dan melaksanakan sebagian tugas Bidang Pertanian dan Peternakan yang berkenaan dengan Pertanian.
Seksi Peternakan dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas memimpin, merencanakan, melaksanakan dan mengatur pelaksanaan sebagian tugas Bidang Pertanian dan Peternakan yang berkenaan dengan kegiatan Seksi Peternakan
Seksi Pasca Panen Pertanian dan Peternakan dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas memimpin, merencanakan, melaksanakan pembinaan dan koordinasi, serta pengawasan dan pengendalian kegiatan pengembangan bisnis dan investasi, sosialisasi dan pendampingan manajemen dan kelembagaan, diversifikasi produk, serta pengawasan mutu dan pengolahan hasil pertanian dan Peternakan
Bidang Ketersediaan dan Distribusi Pangan dipimpin oleh Kepala Bidang yang menyelenggarakan tugas memimpin, merencanakan, mengatur, dan mengendalikan penyelenggaraan kegiatan Ketersediaan dan Distribusi Pangan serta dan membantu Kepala Dinas dilingkup Ketersediaan, Kerawanan Pangan dan Distribusi Pangan
Seksi Kesehatan Hewan dan Kesehatan Masyarakat Veteriner dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas merencanakan, melaksanakan pembinaan dan koordinasi serta pengawasan dan pengendalian kegiatan Ketersediaan dan Kerawanan Pangan
Seksi Distribusi Pangan dipimpin oleh seorang Kepala Seksi menyelenggarakan tugas merencanakan, melaksanakan pembinaan dan koordinasi, serta pengawasan dan pengendalian kegiatan Distribusi Pangan
Bidang Perikanan dipimpin oleh Kepala Bidang yang menyelenggarakan tugas membantu Kepala Dinas dilingkup Perikanan Budidaya dan Penguatan Daya Saing Produk Perikanan serta memimpin, merencanakan, mengatur dan mengendalikan kegiatan penyelenggaraan sebagian tugas Dinas dalam lingkup Perikanan Budidaya dan Penguatan Daya Saing Produk Perikanan.
Seksi Perikanan Budidaya dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas merencanakan, melaksanakan pembinaan dan koordinasi serta pengawasan dan pengendalian budidaya dan produksi perikanan
Seksi Penguatan Daya Saing Produk Perikanan dipimpin oleh Kepala Seksi yang menyelenggarakan tugas merencanakan, melaksanakan pembinaan dan koordinasi serta pengawasan dan pengendalian kegiatan Penguatan Daya Saing
Bidang Konsumsi dan Keamanan Pangan dipimpin oleh seorang Kepala Bidang yang menyelenggarakan tugas melakukan perencanaan, inventarisasi, identifikasi, dan pengembangan serta koordinasi pada Konsumsi dan Penganekaragaman Pangan, serta Keamanan Pangan
Seksi Keamanan Pangan dipimpin oleh seorang Kepala Seksi yang menyelenggarakan tugas perencanaan, inventarisasi, identifikasi dan pengembangan konsumsi dan keamanan pangan.
Tujuan Perancangan
Langkah-Langkah Perancangan
Diagram blok
Berikut diagram blok berserta alur kerjanya dari alat penyiram pestisida menggunakan quadcopter, untuk pengoperasian quadcopter ditunjukan pada gambar diagram 3.2, untuk pengoperasian alat penyiram pestisida di tunjukan pada gambar diagram 3.3.
Keterangan :
Keterangan :
cara Kerja Alat
Cara kerja alat penyemprot ini dapat dibagi atas 3 (tiga) bagian. Bagian pertama ialah komponen apa saja yang menjadi sistem input, yang dimana sistem ini merupakan langkah awal dari kerja alat ini, kemudian sistem proses adalah yang berkerja memproses sinyal yang telah diterima dari sistem input untuk di keluarkan pada bagian ketiga yaitu sistem output-nya.
Pada sistem input, sistem pengendalian dilakukan dengan menggunakan remote controller tx/rx dan receiver sebagai penerima sinyal dari remote tersebut. Dan sebagai sistem pengaktifan penyemprotan disini penulis menggunakan handphoen utnuk mengirim pesan singkat dan modul gsm sebagai penerima pesan tersebut.
Pada sistem proses ini menggunakan arduino yang merupakan otak dari segala input yang bertugas untuk mengeluarkan output atas input yang diterimanya berdasarkan program yang diberikan sebelumnya.
Sistem output pada alat ini menggunakan ada dua macam komponen yang menghasilkan output, motor dc yang berguna untuk memutar baling baling dan menerbangkan quadcopter ini dan motor dc lainya bertugas untuk membuka dan menutup nozzle penyemprot tersebut.
Disini penulis menggunakan Arduino Arduino Uno adalah papan mikorokontroler berbasis ATmega328 yang memiliki 14 pin digital input/output (di mana 6 pn dapat digunakan sebagai output PWM) 6 input analog. Clock speed 16 MHz. Koneksi USB, jack listrik, header ICSP, dan tombol reset. Board ini menggunakan daya yang terhubung kekomputer dengan kabel USB atau daya eksternal dengan adaptor AC-DC atau Baterai.
Arduino Uno adalah pilihan yang baik untuk pertama kali atau pemula yang ingin mengenal Arduino. Di samping sifatnya yang realibel juga harganya murah.
Disini penulis menggunakan 4 baling baling yg berukuran 5 inci disesuaikan dengan panjang frame yg di gunakan
Untuk pengaturan kecepatan si motor penulis menggunakan ESC (electronic speed controller) 30 ampere Ukurannya dihitung berdasarkan kekuatan si motor dan dimana ukuran tersebut terkait dengan kebutuhan motor yaitu sebesar 1000kv.
Untuk sistem pengontrolan disini penulis menggunakan remote TX RX flysky i6 dikarenakan remote ini sudah cukup menggatur 4 channel utama yaitu Throttle, Elevator, Aileron dan Rudder. Sedangkan bila ada tambahan channel bisa dimanfaatkan untuk fungsi lainnya.
Disini penulis memilih memilih frame FY 450 dikarenakan frame ini yg dinilai lebih cocok karena sudah tersedia sendiri port port elektronika dari sistem quadcopter itu sendiri.
Disini penulis menggunakan modul gsm untuk mengaktifkan dan mematikan nozzle penyemprot dikarenakan modul gsm mempunyai jangkauan yang cukup jauh daripada menggunakan modul Bluetooth atau modul WiFI dan yang lainya.
Software Arduino IDE (Integrated Development Enviroment) untuk melakukan pemrograman pada arduino ini.
Software yang di pergunakan sebagai media perancangan komponen Secara Virtual.
Perancangan
Dalam perancangan disini penulis menggunakan dua metode dalam pembuatan media quadcopter dan media penyiramanya untuk pembuatan alat media quadcopter dapat dilihat pada gambar berikut :
gambar 3.4
Dalam pembuatan bentuk dari skematik diperlukan aplikasi fritzing, penggunaan fritzing adalah untuk merancang rangkaian elektronika yang sudah mendukung library-library arduino.Dan untuk memulainya dapat dilihat seperti gambar berikut ini :
a. rangkaian penyiraman
Perlu untuk di ketahui untuk rangkaian penyiramanya ini penulis menggunakan satu arduino uno satu modul gsm dan satu transistor dan diode dan satu motor dc, untuk arduino sebagai mikrokontroller dan sebagai penginputan perintah penyiraman tersebut, untuk modul gsm sebagai perangkat tambahan arduino agar supaya arduino dapat tersambung dengan media handphone sebagai pengiraman perintah dari pengguna untuk menyalakan mematikan penyiraman, dioda untuk sebagai manyalurkan arus menjadi satu arah, transistor berguna sebagai penyalur aliran listrik, motor dc sebagai pemompa air.
Pengkodingan Alat
gambar 3.5
Pengetesan Alat
Pada tahap testing dilakukan pengujian terhadap sistem yang dibuat yaitu dengan menggunakan metode BlackBox testing, adapun pengujian dilakukan melalui terjun kelapangan langsung dimana pengujian tersebut agar dapat mengetahui fungsionalitas dari suatu sistem yang telah dibuat, adapun tahapannya tersebut untuk menemukan kesalahan dalam beberapa kategori berikut:
Permasalahan yang di hadapi dan pemecahan masalahnya
User Requirement
Elisitasi Tahap I
Elisitasi tahap I merupakan daftar yang diperoleh dari hasil pengumpulan data dari lapangan yang dilakukan dengan cara observasi dan wawancara mengenai kekurangan dari sistem yang sedang berjalan, dan kebutuhan pengguna sistem yang belum terpenuhi.
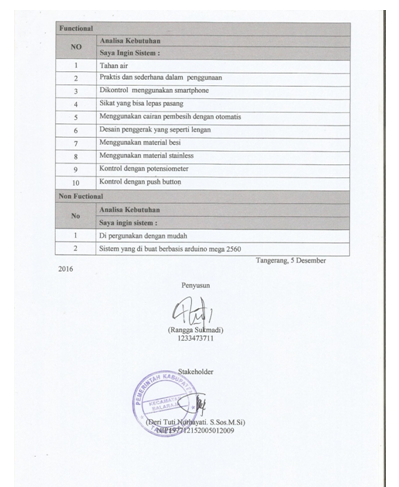
Gambar 3.19. Elisitasi Tahap I
Elisitasi Tahap II
Elisitasi Tahap II dibentuk berdasarkan Elisitasi Tahap I yang kemudian diklasifikasikan lagi dengan menggunakan metode MDI. Berikut penjelasan dari beberapa requirement yang diberi opsi Inessential (I) dan harus dieliminasi:
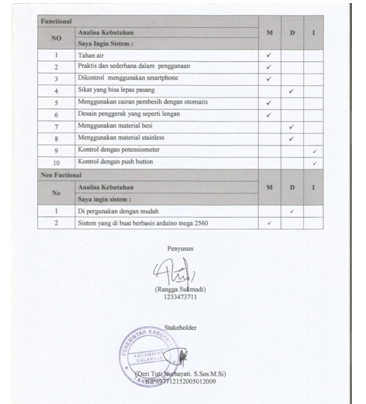
Gambar 3.20. Elisitasi Tahap II
M = Mandatory ( wajib)
D = Desirable (diinginkan)
I = Inessential (bukan bagian dari sistem)
Elisitasi Tahap III
Elisitasi tahap III, merupakan hasil penyusutan elisitasi tahap II dengan cara mengeliminasi semua requirement dengan option I pada metode MDI. Selanjutnya, semua requirement yang tersisa diklasifikasikan kembali melalui metode TOE, yaitu: 1. Technical (T): bagaimana tata cara atau teknik pembuatan requirement dalam sistem yang diusulkan? 2. Operational (O) : bagaimana tata cara penggunaan requirement dalam sistem akan dikembangkan? 3. Economic (E): berapakah biaya yang diperlukan guna membangun requirement di dalam sistem? Metode TOE tersebut dibagi kembali menjadi beberapa option, yaitu: 4. High (H): Sulit untuk dikerjakan, karena teknik pembuatan dan pemakaiannya sulit serta biayanya mahal.Maka requirement tersebut harus dieliminasi. 5. Middle (M): Mampu dikerjakan. 6. Low (L): Mudah dikerjakan
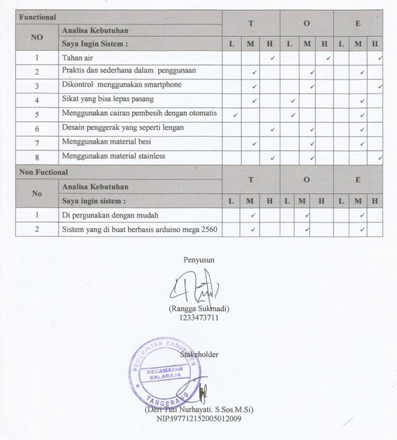
Gambar 3.21. Elisitasi Tahap III
T = Technical
O = Operational
E = Economic
H = High
M = Middle
L = Low
Final Elisitasi
Gambar 3.22. Final Elisitasi
BAB IV
Sistem Yang Di Usulkan
Setelah melakukan pengumpulan beberapa komponen dilanjutkan dengan membuat perancangan dan pemasangan komponen, selanjutnya dilakukan beberapa uji coba kelayakan alat yang penulis buat untuk menapatkan hasil yang penulis inginkan, untuk lebih jelas mengenai hasil dari uji coba ini penulis akan menjelaskan pada sub bab berikut.
Prosedur Sistem Yang Baru
Pada alat penyiraman pestisida yang dibuat ini dapat melakukan penyiraman secara menyeluruh di kontrol dengan sebuah remote controller untuk mengendalikan quadcopter untuk terbang, lalu dengan mengieimkan sms kepada quadcopter dapat mengaktifkan komponen tersebut:
metode blackbox
Berikut adalah tabel metode blackbox berdasarkan sistem quadcopter dan penyiraman pestisida, untuk pengujian pada sistem yaitu sebagai berikut:
tabel 4.1 metode black box
Pada tabel 4.1 telah di jelaskan bagaimana sistem penyiraman itu di lakukan dengan mengirim sms kepada modul gsm lalu modul gsm mengolah perintah yang telah di berikan sebelumnya kepada Arduino lalu arduino mengolahnya lalu menyalakan motor dc tersebut lalu sistem penyiraman telah aktif, dan untuk mematikan sistem penyiraman tersebut kita dapat mengirim pesan kembali lalu arduino mematikan sistem penyiramanya.
perbedaan Antara Sistem Yang Berjalan Dan Sistem Yang Di Usulkan
Adapun perbedaan antara sistem berjalan dan sistem yang diusulkan, bisa dilihat pada tabel dibawah ini :
|
Sistem Berjalan |
Sistem Yang Di Usulkan |
|
1. Penyiramanya secara manual 2. Menguras tenaga 3. penyiraman dilakukan secara manual dengan metode pompa |
1. Menggunakan quadcopter 2. lebih hemat tenaga 3. Penyiramanya otomatis |
Tabel 4.2 perbedaan sistem yang baru dan yang lama.
Analisa
analisa sistem yang di usulkan
a. flowchart sistem quadcopter
flowchart sistem quadcopter
Dapat dijelaskan gambar 4.3 flowchart sistem quadcopter diatas terdiri dari :
a. flowchart sistem penyiraman
flowchart sistem penyiraman
Dapat di jelaskan gambar 4.4 flowchart sistem alat penyiram pestisida diatas yaitu terdiri dari :
Rancangan Program
pemograman Arduino
SMSGSM sms; boolean started=false; char smsbuffer[160]; char n[20];
int relay1=0;
void setup(){
pinMode(relay1,OUTPUT);
if(gsm.begin(9600)){
started=true;
}
if(started){
delsms();
}
delay(1000);
sms.SendSMS("08158049063,"POMPA DI HIDUPKAN");
}
void loop(){
if(gsm.begin(9600)){
started=true;
}
int pos=0;
if(started){
pos=sms.IsSMSPresent(SMS_ALL);
if(pos){
sms.GetSMS(pos,n,smsbuffer,100);
if(!strcmp(smsbuffer,"on")){
digitalWrite(relay1,HIGH);
sms.SendSMS(n,"POMPA TELAH AKTIF");
}
if(!strcmp(smsbuffer,"off")){
digitalWrite(relay1,LOW);
sms.SendSMS(n,"POMPA DI MATIKAN");
}
if(!strcmp(smsbuffer,"semuaon")){
delsms();
}
}
delay(100);
}
void delsms() {
for (int i=0; i<10; i++)
{
int pos=sms.IsSMSPresent(SMS_ALL);
if (pos!=0)
{
if (sms.DeleteSMS(pos)==1){}else{}
}
}
} Int motorpin = A0; Int motorpin = 13;
Int watertime = 6000; //how long to water in milliseconds Int waittime = 360000;//how long to wait between watering Void setup() { Pin mode(motor pin, output); Pin mode(blinkpin, output); } { Void loop() { Digital write(motorpin, HIGH); Digital Write (blinkpin, high); Delay (watertime) Digital write(motorpin, low); Digital Write (blinkpin, low) }
konfigurasi sistem yang baru
Pada spesifikasi sistem yang baru ini didukung oleh beberapa komponen perangkat keras (hardware) dan komponen perangkat lunak (software) yang digunakan untuk membuat program yang baru ini dan membuat alat ini berjalan, untuk informasi perangkat keras apa saja yang di gunakan dan software apa saja yang di gunakan akan di jelaskan pada sub bab berikut ini :
spesifikasi hardware
spesifikasi hardware ialah beberapa komponen yang bertugas untuk menjadi satu kesatuan dan mempunyai tugasnya masing masing, dang perangkat yang penulis gunakan, akan di sebutkan berikut ini :
spesifikasi software
software ialah sebuah perangkat lunak yang digunakan untuk memberikan perintah supaya komponen tersebut dapat bekerja sesuai dengan keinginan pembuatnya dan software yang digunakan penulis disini dapat disebutkan berikut ini :
implementasi
evaluasi
berdasarkan uji coba sistem baik dari segi hardware dan software, dan di buatnya melalui dua kali pengujian antar pengujian hardware dan software.
Dan pengujian software dan hardware yang di maksud ialah melakukan pengecekan sudah bejalan dengan baik semua komponen hardware dan membuat quadcopter itu terbang dan melakukan penyiraman secara baik
Proses ini pengumpulan data ini dilakukan untuk mengetahui dan menganalisa beberapa teori yang dibutuhkan untuk pemecahan masalah dan inovasi apa yang di butuhkan pada Dinas Pertanian ini dan pembuatan sistem ini dilakukan selama 4 minggu .
Dalam perancangan sistem ini terbagi menjadi dua perancangan yaitu perancangan hardware dan software untuk beretujuan agar dapat menghasilkan suatu perancangan yang dapat dipahami oleh pengguna.
Pengujian sistem dilakukan untuk mengetahui apakah pemasangan hardware dan software sudah dapat berfungsi selayaknya yang di inginkan penulis.
Penambahan atau pengurangan bagian bagian yang dapat mendukung atau di rasa kurang bekerja selayak yang di inginkan, sehingga alat ini bisa bekerja secara optimal.
Percobaan alat yang suda dibuat apakah benar benar berjalan atau tidak.
Untuk mengetahui sudah layaknya sistem dan alat yang di buat sudah bekerja secara optimal dan layak untuk dipakai.
Sistem yang dibuat di dokumentasikan selama penelitian dan perancangan berlangsung
Estimasi Biaya
Tabel 4.6.Estimasi Biaya
BAB V
Kesimpulan
Kesimpulan Alat
Dari pembuatan alat penyiraman menggunakan quadcopter ini dapat di tarik beberapa kesimpulan yang dapat menghasilkan solusi dari pokok permasalahn yang di butuhkan di kalangan masyarakat saat ini, yaitu :
1. Dengan dibuatnya suatu sistem yang baru ini bertujuan untuk memberikan suatu sistem yang baru dana dapat meringankan pekerjan para petani, Quadcopter adalah sebuah solusi yang di buat oleh peulis sebagai media baru untuk menyemprotkan pestisida tersebut, quadcopter dipilih karena quadcopter dapat dengan mudah lepas landas tanpa harus memerlukan landasan yang luas untuk lepas landas bekerja selayaknya helicopter namun quadcopter dapat terbang lebih baik dengan maneuver seperti maju mundur atau berputar sehingga berguna sebagai untuk menjangkau setiap sudut sawah dan cukup luas.
2. Quadcopter menjadi media yang lebih dari cukup dikarenakan dapat menjangkau yang cukup luas. Jadi cukup untuk menghemat tenaga para petani disana, dan menghasilkan juga efisiensi pekerjaan mereka
Saran
Dari berdasarkan pembuatan alat dan kesimpulan di atas, ada beberapa saran yang penulis berikan untuk alat ini, dalam rangka supaya dapat memberikan pengembangan dan demi mendapatkan hasil maksimal yaitu :
1. Alat ini di harapkan menjadi suatu acuan yang untuk dapat dikembangkan terlebih lagi dalam hal spesifikasi komponen supaya dapat menjelajah area yang lebih luas.
2. Alat ini pun dapat di kembangkan dengan daya angkat yang lebih besar supaya dapat membawa beban yang lebih dari beban yang penulis buat ini.
Kesan
Adapun kesan dalam peneliti lakukan selama penelitian skripsi ini, diantaranya :
1. penulis jadi dapat menambah wawasan dalam ini bagaiman mencari mengimplementasika solusi secara langsung.
2. penulis mendapatkan wawasan dan pengalaman langsung yang belum di dapat di perkuliahan ini.
3. dapat terjun langsung untuk memberikan suatu inovasi yang dapat di lakukan dan di praktekan langsung kepada masyarakat
DAFTAR PUSTAKA
DAFTAR PUSTAKA