SI1331475790
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
SKRIPSI

OLEH:
1331475790 Jendi Suryadi
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
(2016/2017)
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Disusun Oleh:
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
| Jenjang Studi | : Strata Satu |
| Jurusan | : Sistem Komputer |
| Konsentrasi | : Computer System |
Disahkan Oleh :
Tangerang, 21 Juli 2017
| Ketua | Kepala Jurusan | ||||
| STMIK RAHARJA | Jurusan Sistem Komputer | ||||
| (Ir. Untung_Rahardja, M.T.I) | (Ferry Sudarto, S.Kom,, M.Pd) | ||||
| NIP : 00594 | NIP : 079010 |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Dibuat Oleh :
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Disetujui Oleh :
Tangerang, 21 Juli 2017
| Pembimbing I | Pembimbing II | ||
| (Fredy Susanto, M.Kom) | (Ignatius Agus Supriyono, , S.kom.,MM) | ||
| NID : 04051 | NID : 09004 |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Dibuat Oleh :
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2016/2017
Disetujui Penguji :
Tangerang, 29 September 2016
| Ketua Penguji | Penguji I | Penguji II | ||
| (---------,) | (----------, ) | (------------,) | ||
| NID :------------ | NID :--------- | NID :--------- |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
Saya yang bertandatangan di bawah ini,
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
| Jenjang Studi | : Strata Satu |
| Jurusan | : Sistem Komputer |
| Konsentrasi | : Computer System |
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
| Tangerang, 21 Juli 2017 | |
| Jendi Suryadi | |
| NIM. 1331475790 |
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Perkembangan teknologi dari tahun ketahun berkembang dengan pesat dan telah memberikan banyak keuntungan dalam segala kebutuhan atau keperluan manusia, baik dalam bidang informasi, komunikasi, transportasi, dan bidang-bidang lainnya. Salah satu teknologi yang berkembang pesat saat ini adalah pesawat tanpa awak (Drone) yang dikendalikan dari kejauhan menggunakan remote kontrol. Drone atau pesawat tanpa awak saat ini digunakan untuk kebutuhan foto atau video, untuk memantau suatu wilayah, berbagai keperluan sipil, profesional dan militer. Drone jenis quadcopter merupakan salah satu jenis drone yang banyak digunakan karena memiliki beberapa kelebihan yaitu dapat terbang dengan baik karena memiliki 4 motor brushless yang menjadi penggerak utama dan desain rangka yang sederhana. Dalam penulisan ini, penulis bermaksud untuk merancang sebuah drone dengan jenis quadcopter yang dapat terbang dengan stabil dan jarak tempuh yang jauh sehingga dapat membantu security dalam menjalankan tugasnya. Kontroler yang dipakai pada rancangan ini adalah arducopter. Maka dari itu penulis mengambil judul “Prototype Sistem Controlling Keamanan Dengan Menggunakan Drone Quadcopter Berbasis Arducopter Pada Perguruan Tinggi Raharja. Semoga saja dengan alat ini bisa membantu Perguruan Tinggi Raharja yang saya observasi ini.
Kata Kunci: Drone Quadcopter, Arducopter, Perguruan Tinggi Raharja
ABSTRACT
Technological developments from year to year developed rapidly and have provided many advantages in all human needs or needs, communications, transportation, and other fields. One of the fastest growing technologies today is the remote controlled drone (Drone). Drones or drones are currently used for photo or video needs, to monitor a territory, a variety of civil, professional and military needs. Drone type quadcopter is one type of drone that is widely used because it has some advantages that can fly well because it has 4 brushless motor that became the main mover and simple frame design. In this writing, the author intends to design a drone with a quadcopter type that can fly with a stable and a long distance so that it can help the security in carrying out its duties. The controller used in this design is the arducopter. Therefore the author took the title "Prototype Controlling System Security Using Drone Quadcopter Based Arducopter At Higher Education Raharja. Hopefully with this tool can help Higher Education Raharja that I observation this.
Keywords: Drone Quadcopter, Arducopter
KATA PENGANTAR
Alhamdulillahirabbil’aalamin.
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan beribu-ribu nikmat kepada kita semua, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Skripsi Penulis dapat berjalan dengan baik dan selesai sesuai harapan dengan judul “Prototype Sistem Controlling Keamanan Dengan Menggunakan Drone Quadcopter Berbasis Arducopter Pada Perguruan Tinggi Raharja”
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, Penulis memperoleh informasi berdasarkan hasil observasi dan studi pustaka dari berbagai sumber yang mendukung penulisan laporan ini.
Saya pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan laporan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan ini, izinkanlah penulis menyampaikan pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I selaku selaku Ketua STMIK RAHARJA.
- Bapak Dr. Po. Abas Sunarya, M.Si selaku Direktur STMIK Raharja.
- Bapak Sugeng Santoso, M.Kom selaku Pembantu Ketua I Bidang AkademikSTMIK Raharja.
- Bapak Ferry Sudarto, S.Kom,.M.Pd. selaku Kepala Jurusan Sistem Komputer STMIK Raharja.
- Bapak Fredy Susanto M.Kom.,CCNA.,MTCNA selaku Dosen pembimbing pertama yang telah membantu serta memberikan bimbingan dan arahan kepada penulis..
- Bapak Ignatius Agus Supriyono,S.Kom.,MM. Selaku Dosen pembimbing kedua, terimakasih atas pengarahan serta saran yang telah diberikan kepada penulis, sehingga dapat menjalani skripsi ini dengan penuh ilmu dan semangat..
- Bapak Rusidi sebagai Komandan Regu Security STMIK Raharja sekaligus stakeholder yang telah banyak berkontribusi dan memberikan informasi, sehingga penulis dapat menyelesaikan Skripsi dengan tepat waktu.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kepada Orang Tua yang selama ini telah setia memberikan dorongan semangat, perhatian, dan doa.
- Semua rekan-rekan mahasiswa/i yang telah membantu penulis dalam menyelesaikan laporan Skripsi ini.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari kata sempurna. Oleh karena itu kritik dan saran yang membangun sangat penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, 24 Juli 2017 | |
| Jendi Suryadi | |
| NIM. 1331475790 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 2.1 Teori Umum
- 2.2 Teori Khusus
- 2.2.1 Konsep Dasar Flight Control Board
- 2.2.2 Konsep Dasar Electronic Speed Controller
- 2.2.3 Konsep dasar Brushless Motor
- 2.2.4 Konsep Dasar Baling-Baling
- 2.2.5 Konsep Dasar Frame
- 2.2.6 Baterai Polimer Lithium
- 2.2.7 Remote Control Drone
- 2.2.8 Konsep Dasar GPS dan Kompas
- 2.2.9 Konsep Dasar Kamera
- 2.2.10 Konsep Dasar Gimbal Kamera
- 2.2.11 Konsep Dasar Transmitter dan Receiver
- 2.2.12 Konsep Dasar Power Module
- 2.2.13 Konsep Dasar Telemetry
- 2.2.14 Konsep Dasar Arduino Pro Mini
- 2.2.15 Literatur Review
- 3 BAB III
- 3.1 Gambaran Umum Instansi
- 3.2 Sejarah Singkat Perguruan Tinggi Raharja
- 3.3 Visi, Misi dan Tujuan Perguruan Tinggi Raharja
- 3.4 Struktur Organisasi
- 3.5 Tugas dan Tanggung Jawab
- 3.6 Wewenang dan Tanggu Jawab
- 3.7 Tujuan Perancangan
- 3.8 Langkah-langkah Perancangan
- 3.9 Diagram Blok
- 3.10 Cara Kerja Alat
- 3.11 Pembuatan Alat
- 3.12 Permasalahan Yang Dihadapi dan Alternatif Pemecahan Masalah
- 3.13 User Requirement
- 4 BAB IV
- 5 DAFTAR PUSTAKA
BAB I
Latar Belakang
Perkembangan teknologi dari tahun ketahun berkembang dengan pesat dan telah memberikan banyak keuntungan dalam segala kebutuhan atau keperluan manusia, baik dalam bidang informasi, komunikasi, transportasi, dan bidang-bidang lainnya. Salah satu teknologi yang berkembang pesat saat ini adalah pesawat tanpa awak (Drone) yang dikendalikan dari kejauhan menggunakan remote kontrol. Drone awalnya digunakan di dunia militer. Drone juga diimplementasikan dalam operasi pencarian dan mengontrol keamanan sebuah wilayah atau aplikasi sipil lainnya, seperti kepolisian, security, pemadam kebakaran dan sekarang banyak digunakan didunia pertanian untuk menyiram tanaman.
Teknologi pesawat tanpa awak (Drone) mengalami perjalanan panjang. Konsep penerbangan udara tak berawak ini pertama kali pada 22 Agustus 1849, ketika Austria menyerang kota Venesia Italia dengan balon tak berawak yang membawa peledak. Beberapa balon diluncurkan dari kapal Austria Vulcano. Beberapa balon mencapai sasarannya dan sebagian besar terbawa angin dan berubah arah.
Di Perguruan Tinggi Raharja sistem keamanan kampus hanya mengandalkan security untuk berkeliling mengontrol keamanan kampus dan kamera pengintai atau biasa disebut kamera CCTV untuk merekam. Karena lemahnya sistem kemanan kampus yang diterapkan timbul ide penulis untuk membuat judul “PROTOTYPE SISTEM CONTROLLING KEAMANAN DENGAN MENGGUNAKAN DRONE QUADCOPTER BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA”.
Dengan prototype atau sistem yang akan penulis buat, Drone akan memudahkan security dalam mengontrol lingkungan sekitar area kampus. Security hanya mengendalikan Drone dari Pos jaga dengan menggunakan remote control dan Drone akan terbang keliling mengontrol lingkungan kampus.
Rumusan Masalah
Beberapa hal yang menjadi perumusan dalam penyusunan laporan ini antara lain:
- Bagaimana cara membuat drone quadcopter berbasis arducopter?
- Bagaimana cara kerja drone quadcopter berbasis arducopter dengan menggunakan remote kontrol ?
- Bagaimana cara mengkonfigurasi kamera untuk mengirim video ke komputer yang ada di departement security?
Ruang Lingkup
Adapun ruang lingkup yang dibatasi pada penulisan penelitian ini yaitu:
- Pembuatan Prototype untuk sistem keamanan dengan menggunakan Drone Quadcopter berbasis Arducopter.
- Drone hanya digunakan untuk mengontrol lingkungan sekitar kampus.
- Drone hanya dapat dikendalikan menggunakan remote control dan Smartphone.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Tujuan penelitian yang ingin dicapai dari penulisan laporan ini adalah:
1. Tujuan individual
a. Untuk memenuhi syarat kelulusan jenjang sastra (S1).
b. Mengimplementasikan dan menerapkan ilmu yang didapat selama masa perkuliahan.
c. Sebagai bentuk kontribusi konsep CCIT & COS pada jurusan Sistem Komputer di STMIK Raharja
2. Tujuan Fungsional
a. Hasil dari penelitian dapat dimanfaatkan dan digunakan oleh Perguruan Tinggi Raharja.
b. Sebagai bahan acuan atau referensi bagi Perguruan Tinggi Raharja dan mahasiswa dimasa yang akan datang.
3. Tujuan Operasional
a.Membantu menyelesaikan masalah sistem keamanan kampus yang diterapkan di Perguruan Tinggi Raharja
b.Mencoba mengimplementasikan sebuah teknologi Drone Quacopter dalam meningkatkan keamanan kampus di Perguruan Tinggi Raharja
Manfaat Penelitian
Adapun manfaat yang dapat dihasilkan dari penelitian ini adalah:
1. Manfaat Individual.
a. Dapat mengembangkan ilmu yang penulis dapatkan selama di perkuliahan
b. Menambah wawasan dan memberikan terobosan baru pada tempat perkuliahan.
c. Memberikan kepuasan tersendiri bagi penulis karena dapat menciptakan sesuatu yang bermanfaat dan meringkan pekerjaan Departement security.
2. Manfaat Fungsional
a. Memperoleh data secara Real Time dan berulang kali untuk mengontrol bidang penelitian sesering yang diperlukan.
b. Penelitian ini diharapkan dapat digunakan sebagai bahan penelitian selanjutnya yang berkaitan dengan Drone Quadcopter.
3. Manfaat Operasional
a. Drone diharapkan dapat meningkatkan keamanan dilingkungan kampus.
b. Drone diharapkan dapat memberikan kemudahan security dalam mengontrol lingkungan kampus.
Metode Penelitian SDLC (System Development Life Cycle)
Perencanaan
Perencanaan adalah sebuah proses dasar untuk memahami mengapa sebuah sistem itu harus dibangun, dan pada fase ini memang diperlukan analisa kelayakan dengan mencari data atau melakukan proses informasi gathering kepada para pengguna.
Analisa
1. Analisa Sistem
Pada metode ini peneliti menganalisa sistem-sistem yang sudah ada dengan beberapa poin, seperti bagaimana cara kerja sistem, apa saja komponen yang membangun sistem tersebut dan juga kekurangan dari sistem tersebut.
2. Analisa Perancangan program
Metode Analisa Perancangan Program pada penelitian Skripsi ini, peneliti menggunakan bagan alir program (Flowchart Program).
Perancangan
Dalam laporan Skripsi ini perancangan yang digunakan adalah Metode Perancangan Flowchart terlebih dahulu yang didesain sesuai cara kerja sistem. Pada perancangan alat menggunakan Diagram Blok, karena metode ini dimaksudkan untuk alat apa saja yang digunakan dan bagaimana sistem itu dirancang. Pada pembuatan alat ini, penulis menggunakan alat seperti : Arducopter sebagai flightcontrol-nya untuk mengendalikan fungsi drone.
Implementasi
Tahap ini merupakan tahap meletakan sistem supaya siap dioperasikan. Implementasi sistem juga merupakan proses mengganti atau meninggalkan sistem yang lama dengan mengganti sistem yang baru. Untuk menggantikan sistem yang lama ke sistem yang baru perlu adanya pendekatan atau strategi supaya berhasil.
Prototype
Pada Metode ini menggunakan metode prototyping yaitu proses pembuatan model sederhana software yang mengizinkan pengguna memiliki gambaran dasar tentang program serta melakukan pengujian awal.
Metode prototype yang digunakan adalah metode prototype evolutionary karena metode prototype ini secara terus menerus dikembangkan hingga prototype tersebut memenuhi fungsi dan prosedur yang dibutuhkan oleh device system.
Pengujian
Pada Metode Pengujian ini peneliti menggunakan Metode Pengujian 'Black Box Testing, 'Black Box Testing' adalah metode uji coba yang memfokuskan pada keperluan Software. Karena itu, uji coba Black Box memungkinkan pengembangan Software pada arducopter untuk membuat himpunan kondisi input yang melatih seluruh syarat-syarat fungsional suatu program diantaranya drone dapat berbelok kekiri dan kekanan serta beberapa fitur seperti FollowMee dan Lock Position. Metode Pengujian Black Box berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya fungsi-fungsi yang salah atau hilang dan kesalahan kinerja.
Sistematika Penulisan
Untuk memudahkan dan memahami lebih jelas tentang penulisan Skripsi ini, maka penulis mengelompokan materi penulisan menjadi 5 bab yang saling berkaitan antara masing-masing bab dengan yang lainnya sehingga menjadi kesatuan yang utuh. Penulisan laporan terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub bab yang akan membahas dan menguraikan masalah yang lebih terperinci.
| BAB I | PENDAHULUAN |
| Pada Bab ini berisi tentang Latar Belakang Masalah, Rumusan Masalah, Ruang Lingkup, Tujuan Penelitian, Manfaat Penelitian, Metode Penelitian, dan Sistematika Penulisan yang digunakan dalam penyusunan Laporan.. | |
| BAB II | LANDASAN TEORI |
| Bab ini berisikan tentang Teori Umum yang terdiri dari beberapa definisi, teori, dan istilah-istilah umum yang digunakan dalam penulisan laporan penelitian Skripsi. Teori Khusus berisi definisi, teori, dan istilah-istilah yang bersifat khusus atau mendetail yang memiliki relevansi dengan judul penelitian, dan Literature Review yang merupakan beberapa referensi penelitian sejenis dan relevan dengan judul penelitian. | |
| BAB III | ANALISA SISTEM YANG BERJALAN |
| Bab ini menjelaskan tentang gambaran umum Perguruan Tinggi Raharja, sejarah singkat Perguruan Tinggi Raharja, struktur organisasi, permasalahan yang dihadapi, alternatif pemecahan masalah, analisa proses, sistem yang berjalan, serta alternatif pemecahan masalah. | |
| BAB IV | HASIL PENELITIAN |
| Bab ini berisikan Metode Pengujian Alat, Pengujian Black Box Sistem Yang Diusulkan, Pengujian Prototipe Alat, Konfigurasi Sistem Usulan, Implementasi, Hak Akses, Schedule, dan Estimasi Biaya Penelitian atau Pembuatan Alat. | |
| BAB V | PENUTUP |
| Bab ini berisi Kesimpulan dari hasil penelitian dan pengujian alat, beberapa Saran untuk pengembangan lebih lanjut, serta Kesan dalam menjalankan Skripsi. |
DAFTAR PUSTAKA
Daftar pustaka ini berisi studi pustaka yang digunakan sebagai referensi untuk
menyusun laporan ini.
LAMPIRAN
Lampiran ini merupakan daftar yang memuat keseluruhan lampiran-lampiran
yang melengkapi laporan sebagai lampiran.
BAB II
Teori Umum
Konsep Dasar Sistem
Definisi Sistem
Menurut Rusdiana dan Moch Irfan (2014:29)[1], “Sistem merupakan kumpulan dari beberapa bagian yang memiliki keterkaitan dan saling bekerja sama serta membentuk suatu kesatuan untuk mencapai tujuan dari sistem tersebut”.
Menurut Taufiq (2013:2)[2], “Sistem adalah kumpulan dari sub-sub sistem abstrak maupun fisik yang saling terintegrasi dan berkolaborasi untuk mencapai suatu tujuan tertentu”
Dari beberapa pendapat diatas, dapat disimpulkan bahwa sistem adalah sekelompok unsur yang saling terhubung satu sama lain yang saling berinteraksi untuk mencapai tujuan tertentu.
Karakteristik Sistem
Menurut Hartono (2013:14)[3], bahwa sebuah sistem memiliki paling sedikit sepuluh karakteristik sebagai berikut :
- Komponen (Components)
Komponen Sistem adalah bagian-bagian atau elemen-elemen yang dapat berupa benda atau manusia, berbentuk nyata atau abstrak, dan disebut subsistem - Penghubung antar bagian (Interface)
Sesuatu yang bertugas menjembatani satu bagian dengan bagian lain, dan memungkinkan terjadinya interaksi/komunikasi antar bagian. - Batas (Boundary)
Sesuatu yang membedakan antara satu sistem dengan sistem atau dengan sistem-sistem lain. - Lingkungan (Environment)
Segala sesuatu yang berada diluar sistem dan dapat bersifat menguntungkan atau merugikan sistem yang bersangkutan. - Masukan (Input)
Sesuatu yang merupakan bahan untuk diolah atau diproses oleh sistem. - Keluaran (Output)
Berbagai macam bentuk hasil atau produk yang dikeluarkan dari pengolahan. - Tujuan (Goal/Objective)
Sesuatu atau keadaan yang ingin dicapai oleh sistem, baik dalam jangka pendek maupun jangka panjang. - Sensor dan Kendali (Sensor and Control)
Sesuatu yang bertugas untuk memantau dan menginformasikan perubahan-perubahan didalam lingkungan dan dalam diri sistem kepada sistem. - Umpan Balik (Feedback)
Informasi tentang perubahan-perubahan lingkungan dan perubahan-perubahan (penyimpangan) dalam diri sistem.
Klasifikasi Sistem
Menurut A.Rusdiana dan Moch.Irfan (2014:35)[1], Sistem dapat diklasifikasikan dari beberapa sudut pandang, diantaranya :
- Sistem Abstrak dan Sistem Fisik.
Sistem Abstrak adalah sistem yang berupa pemikiran atau ide-ide yang tidak tampak secara fisik. Misalnya sistem teologia, yaitu sistem yang berupa pemikiran-pemikiran hubungan antara manusia dengan Tuhan. Sistem Fisik merupakan sistem yang ada secara fisik. Misalnya sistem komputer, sistem akutansi, sistem produksi, dan sebagainya. - Sistem Alamiah dan Sistem Buatan Manusia.
Sistem Alamiah adalah sistem yang terjadi melalui proses alam, tidak dibuat manusia. Misalnya sistem perputaran bumi. Sistem Buatan Manusia yang melibatkan interaksi antara manusia dan mesin disebut dan human-machine system atau ada yang menyebutkan dengan man-machine system. Sistem informasi akutansi merupakan contoh man-machine system karena menyangkut penggunaan komputer yang berinteraksi dengan manusia. - Sistem Tertentu dan Sistem Tidak Tentu.
Sistem Tertentu beroperasi dengan tingkah laku yang sudah dapat di prediksi. Interaksi diantara bagian-bagiannya dapat dideteksi dengan pasti sehingga keluaran dari sistem dapat diramalkan. Sistem Komputer adalah contoh dari sistem tertentu yang tingkah lakunya dapat dipastikan berdasarkan program-program yang dijalankan. Sistem Tidak Tentu adalah sistem yang kondisi masa depannya tidak dapat di prediksi karena mengandung unsur probabilitas. - Sistem Tertutup dan Sistem Terbuka.
Sistem Tertutup merupakan sistem yang tidak berhubungan dengan lingkungan luarnya. Sistem ini bekerja secara otomatis tanpa adanya turut campur tangan dari pihak luarnya. Secara teoritis sistem tertutup ini ada, tetapi kenyataannya tidak ada sistem yang benar-benar tertutup, yang ada hanyalah relatively closed system (secara relatif tertutup, tidak benar-benar tertutup). Sistem Terbuka adalah sistem yang berhubungan dan terpengaruh dengan lingkungan luarnya. Sistem ini menerima masukan dan menghasilkan keluaran untuk lingkungan luar atau subsistem lainnya. Karena sistem bersifat terbuka dan terpengaruh oleh lingkungan luarnya, suatu sistem harus mempunyai sistem pengendalian yang baik.
Tujuan Sistem
Menurut Taufiq (2013:5)[2],“Tujuan Sistem merupakan sasaran atau hasil yang diinginkan. Manusia, tumbuhan, hewan organisasi, lembaga dan lain sebagainya pasti memiliki tujuan yang bermanfaat minimal bagi dia sendiri atau bagi lingkungannya. Tujuan sangatlah penting karena tanpa tujuan yang jelas segala sesuatu pasti akan hancur dan berantakan tapi dengan tujuan yang jelas akan lebih besar kemungkinan akan tercapai sasarannya. Begitu juga sistem yang baik adalah sistem yang memiliki tujuan yang jelas dan terukur yang memungkinkan untuk dicapai dan memiliki langkah-langkah yang terstuktur untuk mencapainya. Dengan tujuan yang jelas dan terukur serta menggunkan langkah-langkah terstruktur kemungkinan besar sistem itu akan tercapai tujuannya sesuai dengan apa yang telah menjadi tujuannya”.
Konsep Dasar Sistem Komputer
A. Definisi Sistem Komputer
Menurut Rita Melina (2016:1)[4],“Sistem komputer adalah elemen-elemen yang terkait menjalankan suatu aktifitas dengan menggunakan komputer. Elemen dari komputer terdiri dari manusianya (brainware) perangkat lunak (software) dan perangkat keras (hardware).
Komponen-komponen dalam sistem komputer terbagi 3, yang tidak bisa terpisahkan satu dengan yang lainnya yaitu:
- Hardware (Perangkat Keras)
- Perangkat output
- Perangkat input
- Media penyimpanan
- Pemrosesan
- Software (Perangkat Lunak)
- Sistem operasi
- Program aplikasi
- Bahasa pemograman
- Brainware (Orang Yang Mengoperasikan Komputer)
- Analisa sistem
- Programmer
- Operator
B. Jenis-jenis Hardware
Menurut Rita Melina (2016:1)[4],Jenis-jenis hardware terdiri dari 9 bagian diantaranya sebagai berikut :
- CPU (Central Processing Unit)
Memproses atau mengeksekusi intruksi atau program. CPU juga akan berkomunikasi dengan perangkat input, output, dan storage. - ALU (Arithmetic Logic Unit)
Alat yang melakukan operasi aritmatika dengan dasar penjumlahan. Tujuan menghasilkan keputusan dari operasi logika sesuai dengan intruksi program - CU (Control Unit)
Mengatur dan mengendalikan semua peralatan yang ada pada sistem komputer. Mengartikan dan mengirimkan intruksi ke ALU. Membawa data dari alat input ke memori utama untuk di olah. Membawa hasil olahan data kembali ke memori utama untuk disimpan. - Register
Alat penyimpanan berukuran kecil dengan kecepatan akses cukup tinggi. Fungsi penyimpanan data dan intruksi yang sedang di proses, sementara data dan intruksi lainnya menunggu di dalam memori utama. - Input Device
Perangkat keras komputer yang berfungsi sebagai alat untuk memasukan perintah ke dalam komputer. Alat : keyboard, Microfont, dll - Output Device
Berfungsi untuk menampilkan keluaran sebagai hasil pengolahan data. Alat : monitor, Printer, Speaker, Storage device - RAM (Read Access Memory)
Menyimpan program yang diolah untuk sementara waktu. - ROM (Read Only Memory)
Memori yang hanya bisa di baca dan berguna sebagai penyedia informasi pada saat komputer pertama kali digunakan. Berupa sistem operasi yang terdiri dari program. - Storage Eksternal
Perangkat lunak untuk melakukan operasi penulisan, pembacaan dan penyimpanan data diluar komponen utama.
C. Jenis-jenis Software
- Sistem Operasi
Program data pada komputer yang menghitungkan pengguna dengan hardware dan software komputer. - Program Aplikasi
Program yang di desain untuk melakukan fungsi secara spesifik yang berhubungan langsung dengan pengguna. - Bahasa Pemogramman
Bahasa yang digunakan oleh manusia untuk berkomunikasi dengan komputer.
Konsep Dasar Pengontrolan
A. Definisi Pengontrolan
Menurut Akhmad Insya (2013:1)[5], “Sistem kontrol (control system) merupakan suatu kumpulan cara atau metode yang dipelajari dari kebiasaan-kebiasaan manusia dalam bekerja, dimana manusia membutuhkan suatu pengamatan kualitas dari apa yang telah mereka kerjakan sehingga memiliki karakteristik sesuai dengan yang diharapkan pada mulanya”. Perkembangan teknologi menyebabkan manusia selalu terus belajar untuk mengembangkan dan mengoperasikan pekerjaan-pekerjaan kontrol yang semula dilakukan oleh manusia menjadi serba otomatis (dikendalikan oleh mesin). Dalam aplikasinya, sistem kontrol memegang peranan penting dalam teknologi. Sebagai contoh, otomatisasi industri dapat menekan biaya produksi, mempertinggi kualitas, dan dapat menggantikan pekerjaan-pekerjaan rutin yang membosankan. Sehingga dengan demikian akan meningkatkan kinerja suatu sistem secara keseluruhan, dan pada akhirnya memberikan keuntungan bagi manusia yang menerapkannya.
Dalam aplikasinya, suatu sistem kontrol memiliki tujuan/sasaran tertentu. Sasaran sistem kontrol adalah untuk mengatur keluaran (output) dalam suatu sikap / kondisi / keadaan yang telah ditetapkan oleh masukan (input) melalui elemen sistem kontrol.
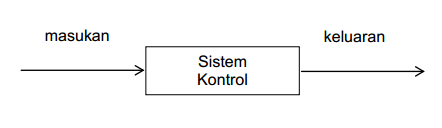
Gambar 2.1. Sistem Kontrol
Dengan adanya sasaran ini, maka kualitas keluaran yang dihasilkan tergantung dari proses yang dilakukan dalam sistem kontrol ini.
A. Definisi Pengontrolan
A. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi dkk dalam jurnal mekanikal Vol 3 No 2 (2012:261)[6], sistem kontrol loop terbuka adalah ”suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian. Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya kealat terkendali.”
B. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi dkk dalam jurnal mekanikal Vol 3 No 2 (2012:261)[6], sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.” Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.
Konsep Dasar Prototipe
A. Definisi Prototipe
Menurut Darmawan (2013:229)[7],“Prototype adalah suatu versi dari sebuah sistem potensial yang memeberikan ide bagi para pengembang dan calon pengguna, bagaimana sistem akan berfungsi dalam bentuk yang telah selesai”.
Menurut Uzzaman (2015:71)[8],“Prototype adalah produk demonstrasi. Pada tahap ini tidak semua fitur sudah diletakkan. Pengembang sering memproduksi Prototype semacam ini untuk mempresentasikan contoh produk kepada investor. Dengan demikian, investor bisa melihat produk asli dan membuktikan bahwa produk tersebut menarik dan berguna.”
Menurut Seema dan Malhotra pada International Journal Of Advances In Computing And Information Technology (2012:279[9],“Prototyping is an attractive idea for complicated and large systems for which there is no manual process or existing system to help determining the requirements. A prototype is a toy implementation of a system; usually exhibiting limited functional capabilities, low reliability, and inefficient performance.”
(“Prototyping adalah ide menarik untuk sistem yang rumit dan besar dengan tidak ada proses manual atau sistem yang ada untuk membantu menentukan kebutuhan. Sebuah prototipe adalah implementasi mainan dari sistem; biasanya, ditunjukkan dengan kemampuan terbatas fungsional, kehandalan rendah, dan kinerja yang tidak efisien.”)
Berdasarkan beberapa definisi di atas, maka dapat disimpulkan bahwa Prototype adalah sample produk atau sistem yang dibuat sebelum melaksanakan pembuatan yang sesungguhnya.
B. Jenis-jenis Prototipe
Menurut Darmawan (2013:230)[7],Terdapat dua jenis Prototipe: Evolusioner dan Persyaratan. Prototipe Evolutioner (Evolutionary Prototype) terus menerus disempurnakan sampai memiliki seluruh fungsional yang dibutuhkan pengguna dari sistem yang baru. Prototipe ini kemudian dilanjutkan produksi. Jadi satu Prototipe Evolutioner akan menjadi sistem aktual. Akan tetapi, Prototipe Persyaratan (Requrement Prototype) dikembangkan sebagai satu cara untuk mendefenisikan persyaratan-persyaratan fungsional dari sistem baru ketika pengguna tidak mampu mengungkapkan apa yang mereka inginkan. Pengembangan Prototipe Evolusioner menunjukan empat langkah dalam pembuatan suatu Prototipe Evolusioner. Empat langkah tersebut adalah :
1. Mengidentifikasi kebutuhan pengguna. Pengembang mewanwancarai pengguna untuk mendapatkan ide mengenai apa yang di minta dari sistem.
2. Membuat satu prototipe. Pengembang mempergunakan satu alat prototipe atau lebih untuk membuat prototipe.
3. Menentukan apakah prototipe dapat di terima, pengembang mendemonstrasikan prototipe kepada para pengguna untuk mengetahui apakah telah memberikan hasil yang memuaskan. jika sudah, langkah empat akan di ambil, jika tidak prototipe direvisi dengan mengulang kembali langkah satu, dua, tiga, dengan pemahaman yang lebih baik mengenai kebutuhan pengguna.
4. Menggunakan prototipe, prototipe menjadi sistem produksi.
C. Daya Tarik Prototipe
Menurut Darmawan (2013:230)[7],Pengguna maupun pengembang menyukai prototipe karena alasan-alasan di bawah ini:
1. Membaiknya komunikasi antara pengembang dan pengguna.
2. Pengembang dapat melakukan pekerjaan yang lebih baik dalam menentukan kebutuhan pengguna.
3. Pengguna memainkan peranan yang lebih aktif dalam pengembangan sistem
4. Pengembang dan pengguna menghabiskan waktu dan usaha yang lebih sedikit dalam mengembangkan sistem.
5. Implementasi menjadi jauh lebih mudah karena pengguna tahu apa yang diharapkan.
Konsep Dasar Drone
A. Definisi Dronee
Menurut Herry Tjiang (2016:1)[10], “Drone/UAV adalah Unmanned Aerial Vehicle atau disingkat UAV adalah pesawat yang diterbangkan tanpa awak atau unmanned.” UAV adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot atau mampu mengendalikan dirinya sendiri, menggunakan hukum aerodinamika untuk mengangkat dirinya, bisa digunakan kembali dan mampu membawa muatan baik senjata maupun muatan lainnya.
B. Sejarah Drone Quadcopter
Penggunaan dan pengembangan teknologi drone muncul sejak awal abad 19, sebelum perang dunia I, pertama kali di tanggal 22 Agustus 1849. Pada saat itu, ada pertempuran antara Austria melawan kota Venesia, Italia. Austria yang menguasai mayoritas wilayah Italia meluncurkan ratusan balon dari kapal Austria Vulcano. Dan balon-balon tersebut pun berhasil mengenai target, walaupun beberapa diantaranya justru meleset berubah arah karena tertiup angin dan malah meledak di perbatasan Austria dan Italia.
Kemudian, pada 8 November 1898, Nicolas Tesla, penemu AS keturunan Serbia mematenkan remote control atau pengendali jarak jauh temuannya. Remote control ini menjadi dasar ilmu robotik kontemporer. Tesla membuat kapal dan balon yang bisa dikendalikan dari jarak jauh. Perkembangan Drone. Kemudian pada era Perang Dunia II, Drone digunakan untuk alat latihan para tentara untuk menembak target. Militer Jerman dari pemerintahan Nazi juga menggunakan drone sebagai senjata udara UAV sepanjang Perang Dunia II tersebut.
1. Era perang dunia
Pesawat tanpa pilot pertama dikembangkan selama dan setelah Perang Dunia I. Yang pertama adalah “Aerial Target” dikembangkan pada 1916 ini dimaksudkan untuk meniru Zeppelins, tetapi tidak pernah terbang. Tak lama kemudian, Hewitt-Sperry Automatic Airplane (bom terbang) melakukan penerbangan perdananya, menunjukkan konsep pesawat tak berawak. UAV ini rencananya digunakan sebagai torpedo udara, versi awal dari rudal jelajah modern. Pengendalian pesawat ini dengan menggunakan giroskop.

Gambar 2.4. Drone Aerial Target
Pada bulan November 1917, Hewitt-Sperry Automatic Airplane ditunjukkan untuk Angkatan Darat AS. Setelah keberhasilan demonstrasi ini, Angkatan Darat menugaskan sebuah proyek untuk membangun sebuah torpedo udara, yang kemudian dikenal sebagai Bug Kettering dan terbang tahun 1918. Beberapa penerus dikembangkan selama periode setelah Perang Dunia I dan sebelum Perang Dunia II. Ini termasuk Laring, diuji oleh Royal Navy antara tahun 1927 dan 1929, Fairey “Queen” yang dikembangkan oleh Inggris pada tahun 1931 masih oleh Inggris dengan UAV “DH 82B Queen Bee” pada tahun 1935. Dari UAV inilah pertama kali digunakan istilah ”drone” Pesawat tanpa pilot pertama dikembangkan selama dan setelah Perang Dunia I. Yang pertama adalah “Aerial Target,” dikembangkan pada 1916 ini dimaksudkan untuk meniru Zeppelins, tetapi tidak pernah terbang. Tak lama kemudian, Hewitt-Sperry Automatic Airplane (bom terbang) melakukan penerbangan perdananya, menunjukkan konsep pesawat tak berawak. UAV ini rencananya digunakan sebagai torpedo udara, versi awal dari rudal jelajah modern. Pengendalian pesawat ini dengan menggunakan giroskop. Pada bulan November 1917, Hewitt-Sperry Automatic Airplane ditunjukkan untuk Angkatan Darat AS. Setelah keberhasilan demonstrasi ini, Angkatan Darat menugaskan sebuah proyek untuk membangun sebuah torpedo udara, yang kemudian dikenal sebagai Bug Kettering dan terbang tahun 1918.Beberapa penerus dikembangkan selama periode setelah Perang Dunia I dan sebelum Perang Dunia II. Ini termasuk Laring, diuji oleh Royal Navy antara tahun 1927 dan 1929, Fairey “Queen” yang dikembangkan oleh Inggris pada tahun 1931 masih oleh Inggris dengan UAV “DH.82B Queen Bee” pada tahun 1935. Dari UAV inilah pertama kali digunakan istilah ”drone” Selama Perang Dunia II, drone digunakan baik sebagai alat latihan untuk target menembak untuk sistem pertahanan udara maupun pesawat terbang. Nazi Jerman juga telah diproduksi dan menggunakan UAV selama Perang Dunia II. Setelah perang, mesin jet yang diterapkan untuk drone, dengan yang pertama adalah Teledyne Ryan Firebee I 1951 Pada tahun 1955, Model 1001, dikembangkan oleh Beechcraft yang dibuat untuk Angkatan Laut Amerika Serikat. UAV ini tidak lebih dari pesawat yang dikendalikan remote sampai Era Vietnam.
2. Era Modern
Pesawat drone pertama UAV milik USA Kelahiran UAV Amerika dimulai pada 1959 ketika Angkatan Udara AS, khawatir kehilangan pilot di atas wilayah musuh, mulai merencanakan penerbangan tanpa awak. Setelah Soviet berhasil menembak pesawat mata-mata mereka U-2 pada tahun 1960, program UAV yang sangat rahasia diluncurkan dengan kode “Red Wagon.” UAV era-modern digunakan pertama selama 2 Agustus dan 4 Agustus. Pada 1964 ketika terjadi bentrokan di Teluk Tonkin antara AS dan angkatan laut Vietnam Utara. Selama Perang Vietnam. Ketika China menunjukkan foto-foto pesawat tanpa awak AS yang jatuh setelah Perang Vietnam respon Angkatan Udara AS hanyalah “no comment.” Namun, pada 1973, militer AS akhirnya secara resmi mengkonfirmasi bahwa mereka telah memanfaatkan teknologi UAV di Vietnam, yang menyatakan bahwa selama perang, lebih dari 3.435 misi UAV diterbangkan, dimana sekitar 554 hilang dalam pertempuran.

Gambar 2.5. Drone UAV USA
Ketika Perang Yom Kipur 1973, Israel mengembangkan UAV pertama dengan real-time surveilans. Setelah itu rudal permukaan udara Soviet yang digunakan Mesir dan Suriah bisa digempur jet Israel hingga rusak parah. Gambar dan radar decoying disediakan oleh UAV ini membantu Israel untuk menetralisir pertahanan udara Suriah pada awal 1982 ketika Perang Libanon, sehingga tidak ada pilot yang yang tewas. Pada tahun 1987, Israel telah mengembangkan UAV berbasis siluman, dorong tiga dimensi vectoring kontrol, UAV jet untuk pertama kalinya.
Perkembangan teknologi UAV tumbuh pesat selama tahun 1980 dan 1990 yang digunakan selama Perang Teluk Persia pada 1991 dan menjadi mesin pertempuran lebih murah dan lebih mampu. Sementara sebagian besar drone dari tahun-tahun sebelumnya yang terutama pesawat pengintai, beberapa telah berevolusi dengan mampu membawa amunisi. General Atomics MQ-1, yang menggunakan AGM-114 Hellfire rudal udara-ke-permukaan dikenal sebagai kendaraan udara tempur tak berawak (UCAV).
3. Setelah Serangan Teroris
Sementara kebanyakan UAV yang digunakan oleh militer, teknologi ditugaskan oleh CIA setelah serangan teroris 11 September 2001. Operasi pengumpulan intelijen dimulai pada tahun 2004, dengan UAV CIA yang dioperasikan terutama terbang di atas Afghanistan, Pakistan, Yaman, dan Somalia. Program UAV pertama CIA disebut Eagle Program. Pada 2008, USA telah mempekerjakan 5.331 UAV, yang berarti dua kali jumlah pesawat berawak. Dari jumlah tersebut, Predator telah menjadi yang paling dipuji. Tidak seperti UAV lain, Predator dipersenjatai dengan rudal Hellfire. Predator digunakan selama perburuan Osama Bin Laden dan telah menunjukkan kemampuan menunjuk laser pada target untuk akurasi. Keberhasilan keseluruhan dari misi Predator jelas karena dari Juni 2005 sampai Juni 2006 saja, Predator melakukan 2,073 misi sukses dalam 242 serangan terpisah.

Gambar 2.6. Drone Predator USA
Sementara Predator dioperasikan dari jarak jauh melalui satelit dari lebih dari 7.500 mil jauhnya, Global Hawk beroperasi hampir mandiri. Setelah pengguna menekan tombol, menyiagakan UAV lepas landas, satu-satunya interaksi antara darat dan UAV adalah petunjuk arah melalui GPS. Global Hawks memiliki kemampuan untuk lepas landas dari San Francisco, terbang melintasi Amerika Serikat, dan memetakan seluruh negara bagian Maine sebelum kemudian kembali. Pada Februari 2013, dilaporkan bahwa UAV yang digunakan oleh setidaknya 50 negara, beberapa di antaranya telah membuat sendiri, termasuk Iran, Israel dan China.
C. Jenis-jenis Drone
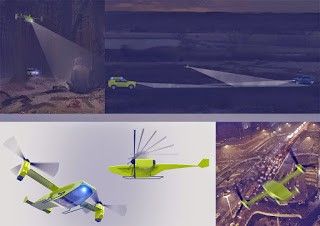
• Fixed Wing Drone
Drone jenis ini berbentuk seperti pesawat komersial dan digunakan untuk proses yang cepat daya jangkau lebih cepat serta lebih luas, biasanya untuk pemetaan (mapping) atau konsepnya seperti scanning. Drone jenis Fixed Wing memiliki energi lebih irit baterai karena single baling-baling.
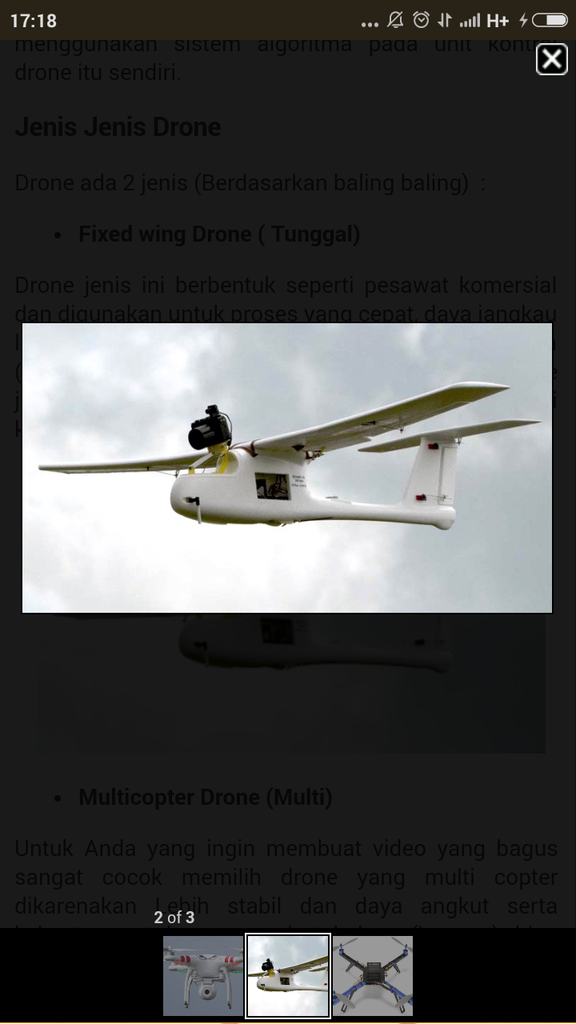
Gambar 2.7. Fixed Wing Drone
2. Multicopter Drone
Multicopter drone adalah drone yang memiliki beberapa baling-baling sehingga cocok untuk mengambil gambar atau video dikarenakan lebih stabil dan daya angkut serta kekuatan untuk mengangkat beban (kamera) yang lebih berat. Semakin banyak baling-baling semakin stabil dan lebih aman. Beberapa jenis baling-baling :
a. 3 baling-baling (Threecopter)
b. 4 baling-baling (Quadcopter)
c. 6 baling-baling (Hexacopter)
d. 8 baling-baling (Octacopter)
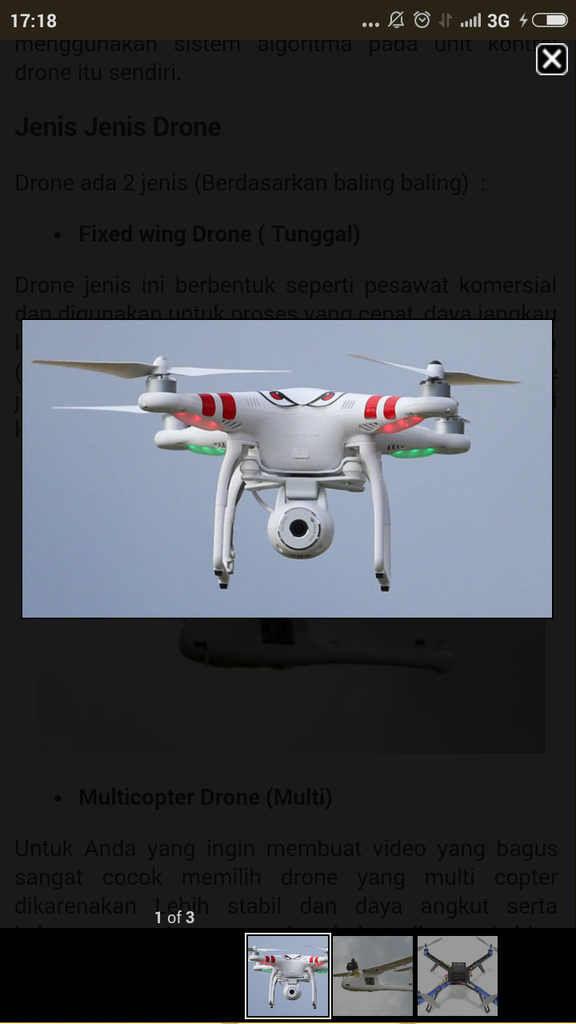
Gambar 2.8. Quadcopter Drone
Penggunaan Drone Quadcopter
Menurut Ardy (2015:1)[11], bahwa drone memiliki 8 fungsi dan kegunaannya sebagai berikut :
1. Militer
Fungsi drone sekarang semakin sering digunakan dalam berbagai keperluan tidak hanya untuk operasi militer tapi juga sebagai mata-mata. Beberapa drone dilengkapi dengan sistem persenjataan.

Gambar 2.9. Drone Militer Indonesia
2. Medis
Pesawat drone kini mulai dikembangkan untuk tujuan kesehatan, misalnya untuk mengangkut obat-obatan dan peralatan medis kedaerah yang sulit dijangkau, terutama untuk menembus daerah-daerah konflik atau bencana

Gambar 2.10. Drone untuk medis
3. Agrikultur
Drone juga banyak digunakan di sektor pertanian misalnya untuk evaluasi kondisi tanah, untuk mengidentifikasi hama yang menyerang tanaman, pemetaan traktor, atau untuk menyebarkan pestisida, air dan pupuk.
Gambar 2.11. Drone menyemprotkan pestisida
4. Pemantauan Cuaca
Drone juga dapat digunakan untuk keperluan laporan cuaca, badai mendeteksi, memprediksi dan mempelajari kondisi cuaca saat itu.

Gambar 2.12. Drone pemantau kondisi cuaca
5. Pemetaan
Fungsi lainnya dari pesawat drone adalah untuk pemetaan langsung dilapangan yang hasilnya nanti digunakan untuk pembuatan peta tiga dimensi, foto atau citra yang dihasilkan kemudian diproses dan dibuat menjadi peta untuk kemudian dilakukan analisis.
Gambar 2.13 Drone Untuk Pemetaan
6. SAR
Dibidang keselamatan udara drone juga sudah dimulai digunakan untuk operasi pencarian dan penyelamatan, terutama pada malam hari di daerah yang luas dan sulit dijangkau. Drone juga digunakan untuk memantau satwa liar, memantau populasi dan kehidupan hewan serta membantu dalam kegiatan konservasi hutan.
Gambar 2.14. Drone Pencarian orang hilang

Gambar 2.14. Drone Pencarian orang hilang
7. Pemantauan Lalu Lintas
Di bidang transportasi lalu lintas, drone digunakan untuk memantau kemacetan lalu lintas dikota. Biasanya digunakan oleh polisi untuk memantau kondisi real di lapangan pada saat itu.

Gambar 2.16. Drone memantau kemacetan lalu lintas
8. Jurnalis
Pesawat drone juga sedang dikembangkan untuk keperluan jurnalisme, misalnya untuk mengambil foto, mengambil gambar, merekam video dan pengumpulan data.

Gambar 2.17. Drone Jurnalis
Teori Khusus
Konsep Dasar Flight Control Board
A. Definisi Flight Control Board
Menurut Caesar Wiratama (2016:1)[12], ”Flight controller adalah otak dari drone, Flight controller ini membaca sinyal-sinyal dari sensor dan melakukan kalkulasi untuk memerintahkan drone bergerak sesuai keinginan”. Adapun berikut ini adalah penjelasan dari fitur-fitur yang ada pada Arducopter versi 2.6 :.
1. Processor Atmega 2560
Processor adalah unit utama yang menjalankan firmware autocopter dan melakukan semua perhitungan. Sebagian besar flight controller memiliki prosessor 32 bit yang lebih powerfull dari prosessor 8bit, tetapi prosessor 8bit masih lebih populer karena lebih murah
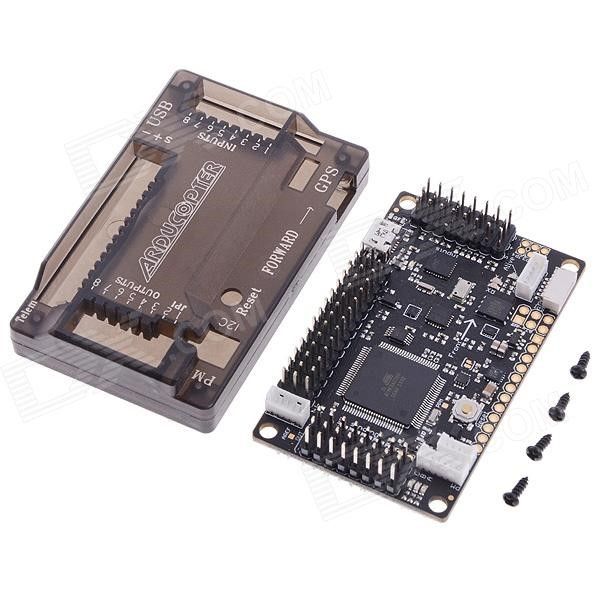
Gambar 2.18 Arducopter 2.6
2. Accelerometer dan Gyroscope
Accelerometer dan gyroscope merupakan sensor inersial drone, yaitu mengukur gerakan drone tersebut dari dalam (inersial). Accelerometer mengukur percepatan translasi sedangkan gyro mengukur rotasi. Kombinasi dari kedua pengukuran tersebut memungkinkan flight controller menghitung attitude (sikap) gerakan drone dan melakukan koreksi.
Gambar 2.19 Accelerometer dan Gyroscope
3. Barometer
Barometer adalah sensor tekanan yang berfungsi untuk mengukur ketinggian drone. Semakin tinggi kita dari permukaan bumi, maka tekanan akan semakin rendah. Sensor ini sangatlah sensitif.

Gambar 2.20 Barometer
Konsep Dasar Electronic Speed Controller
A. Definisi Electronic Speed Controller
Menurut Topik (2012:1)[2], ”ESC atau disebut juga Electronic Speed Control adalah driver penggerak untuk jenis motor brushless, biasanya digunakan pada bidang aeronautical atau RC”. untuk melakukan interface dengan ESC, caranya cukup mudah, yaitu dengan memberikan pulsa pada pin input ESC yang akan berpengaruh pada kecepatan motor brushless, cara kerjanya yaitu dengan cara menterjemahkan sinyal yang diterima receiver dari transmitter. Terdapat berbagai merk ESC dengan kekuatan arus (current rating) dan kekuatan voltase (voltage rating) serta featur yang ditawarkan.

Gambar 2.21 Electronic Speed Controller 30A
Sistem ESC untuk motor sangat berbeda dengan desain, sebagai hasilnya ESC tidak kompatibel dengan motor brushless. Sistem Brushless ESC pada dasarnya mendorong tri-fase motor brushless dengan mengirimkan urutan sinyal untuk rotasi. Motor brushless telah menjadi sangat populer dengan radio kontrol pesawat penggemar karena efisiensi mereka, daya, umur panjang dan ringan dibandingkan dengan motor disikat tradisional. Namun, brushless AC pengendali motor jauh lebih rumit daripada pengendali motor. Fase yang benar bervariasi dengan putaran motor, yang akan diperhitungkan oleh ESC. Biasanya, EMF dari motor yang digunakan untuk mendeteksi rotasi ini, tetapi variasi ada yang menggunakan magnet (Hall Effect) atau optik detektor. Kontrol kecepatan komputer-programmable umumnya memiliki pilihan yang ditentukan pengguna yang memungkinkan pengaturan tegangan rendah cut-off batas, waktu, akselerasi, pengereman dan arah rotasi. Membalikkan arah motor juga dapat dicapai dengan beralih dua dari tiga lead dari ESC ke motor.
Konsep dasar Brushless Motor
A. Definisi Brushless Motor
Menurut Hani dkk dalam jurnal CCIT Vol.9 No.1 (2015:29)[13], “Motor DC adalah jenis motor yang menggunakan tegangan DC (Tegangan yang searah) sebagai sumber energi. Dengan memberikan tegangan yang berbeda dikedua terminal, motor akan berputar dalam satu arah, dan apabila polaritas tegangan dibalik maka arah putaran motor akan terbalik juga”. Motor Brushless adalah sebuah motor yang membutuhkan tegangan searah untuk menjalankannya. Pada umumnya motor jenis ini menggunakan sikat dan mengoperasikannya sangat mudah tinggal dihubungkan dengan sumber DC sehingga motor langsung bekerja. Jenis motor ini memerlukan perawatan pada sikatnya serta banyak terjadi rugi tegangan pada sikat. Sehingga pada era sekarang ini motor DC dikembangkan tanpa menggunakan sikat yang dikenal dengan Motor BLDC (Brushless Direct Current Motor).
Dibandingkan dengan motor DC, BLDC memiliki biaya perawatan yang lebih rendah dan kecepatan yang lebih tinggi akibat tidak digunakannya brush.
Brushless DC Motor termasuk kedalam jenis motor sinkron. Artinya medan magnet yang dihasilkan oleh stator dan medan magnet yang dihasilkan oleh rotor berputar pada frekuensi yang sama. Motor BLDC tidak mengalami slip seperti yang terjadi pada motor induksi biasa. Motor jenis ini mempunyai magnet permanen pada bagian rotor dan elektromagnet pada bagian stator. Setelah itu, dengan menggunakan sebuah rangkaian sederhana (simple computer system), maka kita dapat merubah arus di elektromagnet ketika bagian rotornya berputar.
Walaupun merupakan motor listrik sinkron AC 3 fasa, motor ini tetap disebut dengan BLDC karena pada implementasinya BLDC menggunakan sumber DC sebagai sumber energi utama yang kemudian diubah menjadi tegangan AC dengan menggunakan inverter 3 fasa.
Tujuan dari pemberian tegangan AC 3 fasa pada stator BLDC adalah menciptakan medan magnet putar stator untuk menarik magnet rotor. Oleh karena tidak adanya brush pada motor BLDC, untuk menentukan timing komutasi yang tepat pada motor ini sehingga didapatkan torsi dan kecepatan yang konstan, diperlukan 3 buah sensor hall dan atau encoder. Pada sensor hall, timing komutasi ditentukan dengan cara mendeteksi medan magnet rotor dengan menggunakan 3 buah sensor hall untuk mendapatkan 6 kombinasi timing yang berbeda, sedangkan pada encoder, timing komutasi ditentukan dengan cara menghitung jumlah pola yang ada pada encoder. Pada umumnya encoder lebih banyak digunakan pada motor BLDC komersial karena encoder cenderung mampu menentukan timing komutasi lebih presisi dibandingkan dengan menggunakan hall sensor. Hal ini terjadi karena pada encoder, kode komutasi telah ditetapkan secara fixed berdasarkan banyak kutub dari motor dan kode inilah yang digunakan untuk menentukan timing komutasi. Namun karena kode komutasi encoder untuk suatu motor tidak dapat digunakan untuk motor dengan jumlah kutub yang berbeda. Hal ini berbeda dengan hall sensor. Apabila terjadi perubahan pole rotor pada motor, posisi sensor hall dapat diubah dengan mudah. Hanya saja kelemahan dari sensor hall adalah apabila posisi sensor hall tidak tepat akan terjadi keselahan dalam penentuan timing komutasi atau bahkan tidak didapatkan 6 kombinasi timing komutasi yang berbeda.

Gambar 2.22 Brushless Motor
Konsep Dasar Baling-Baling
A. Definisi Baling-Baling (Propeller)
Menurut Wakijan Pardi (2015:1)[14], “Propeller atau baling-baling adalah airfoil yang berputar yang berguna untuk menginduksi gaya hambatan, stall, dan gaya aerodynamic lainnya yang di aplikasikan pada setiap airfoil.” Baling-baling memberikan gaya dorong yang diperlukan untuk menaik atau kadang kala digunakan untuk mendorong pesawat melewati udara.
Tenaga pada motor digunakan untuk memutar baling-baling dimana perputarannya menciptakan gaya dorong sama seperti cara sayap memproduksi gaya angkat. Besarnya gaya dorong tegantung dari bentuk airfoilnya, (angle of attack) dari pisau baling-baling tersebut. Baling-baling tersebut memiliki bentuk yang berputar sehingga memiliki sudut yang berbeda dari pangkal sampai dengan ujung baling-baling. Alasan dari bentuk tersebut adalah untuk memproduksi gaya angkat yang seragam dari pangkal sampai ujung, saat baling-baling berputar ada perbedaan kecepatan pada berbagai bagian dari pisau baling-baling, Ujung baling-baling berputar lebih cepat daripada bagian yang dekat dengan bagian pangkal, karena bagian ujung berputar dengan jarak yang lebih besar dalam waktu yang sama.
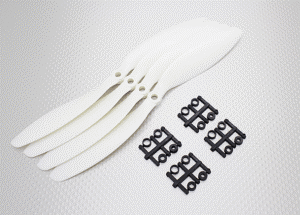
Gambar 2.23 Baling-baling (Propeller)
B. Sejarah Baling-baling
Baling-baling pertama kali dibuat di Inggris pada tahun 1680 oleh HOOKE. Kemudian sekitar tahun 1804 di Amerika, seorang yang bernama Colonel Stevens mencoba menggunakan baling-baling pada kapalnya yang mempunyai panjang 7,5 meter. Pada tahun 1828, Russel berhasil pula membuat sebuah baling-baling untuk dipasang pada sebuah kapal yang berukuran 60 feet yang pada saat itu dapat mencapai kecepatan sekitar 6 knot. Tetapi keberhasilan ini belum mendapat perhatian dari sarjana-sarjana Austria dan para pemilik kapal lainnya.
Akhirnya pada tahun 1836, seorang yang bernama PETTITSMITH dari Inggris mencoba sebuah baling baling ciptaannya yang dipasang pada sebuah kapal kayu berukuran 6 ton dengan mesin penggerak sebesar 6 HP yang percobaan pertamanya ini dilaku-kan di Paddington Canal. Pada percobaan tersebut kapal
PETTITSMITH menabrak kapal lain yang sedang tambat di tepi kanal dan tabrakan ini telah mengakibatkan patahnya sebagian dari baling-ba-lingnya, tetapi dengan patahnya sebagian baling-baling tersebut secara tidak disangka kapalnya melaju lebih cepat. Sehingga dari kejadian tersebut Smith dapat menyempurnakan baling-baling buatannya dengan lebih baik lagi.
Sejak penggunaan pertama kali sampai dengan sekarang, baling-baling sebagai alat penggerak kapal berkembang secara tahap demi tahap. Walaupun demikian saat ini baling-baling merupakan alat peng-gerak kapal mekanis yang paling banyak digunakan untuk kapal-kapal dari segala ukuran dan jenisnya.
Sejak saat itu telah banyak dilakukan penelitian dan pengembangan dari baling-baling untuk lebih me-ningkatkan unjuk kerja dan effisiensi baling-baling.
Seperti kita ketahui baling-baling merupakan alat penggerak kapal yang paling effisien dibanding dengan alat penggerak lainnya, seperti water jet, roda kemudi dan voith scheneider propeller. Walaupun demikian masih dilakukan beberapa percobaan untuk lebih meningkatkan efisiensi dari baling-baling jenis sekerup ini (screw propeller).
Terdapat berbagai macam jenis propeller kapal yang dapat digunakan, terutama untuk kapal dengan ber-bagai tipe dan bentuk, mulai dari penggunaan angin (layar), tenaga manusia (dayung), dan sejak ber-kembangnya penggunaan motor uap, mulai ber-kembang penggunaan roda dayung, kemudian dengan ditemukannya motor diesel penggunaan roda dayung bergeser ke penggunaan propeller. Untuk pening-katan kecepatan ada kalanya menggunakan motor jet, motor listrik, dan sebagainya.
Konsep Dasar Frame
Definisi Frame
Menurut Ardy (2015:1)[11],“Frame merupakan tempat untuk meletakkan komponen-komponen dari quadcopter.” Ibarat Mobil, Frame merupakan Body dari quadcopter. Jenis frame disesuaikan dengan kebutuhan. Untuk bahan nya sendiri ada berbagai macam seperti PCB Fiber, Alumunium, Fiber Glass, Carbon, bahkan ada yang terbuat dari kayu.

Gambar 2.24 Frame Tricopter
Baterai Polimer Lithium
Menurut Musbikhin (2014:1)[15],”Baterai lithium polymer atau biasa disebut dengan LiPo merupakan salah satu jenis baterai yang sering digunakan dalam dunia RC.” Utamanya untuk RC tipe pesawat dan helikopter. Ada tiga kelebihan utama dan beberapa kelemahan yang ditawarkan oleh baterai berjenis LiPo dari pada baterai jenis lain seperti NiCad atau NiMH yaitu :
1. Kelebihan Batre LiPo
a. Baterai LiPo memiliki bobot yang ringan dan tersedia dalam berbagai macam bentuk dan ukuran
b. Baterai LiPo memiliki kapasitas penyimpanan energi listrik yang besar.
c. Baterai LiPo memiliki tingkat discharge rate energi yang tinggi, dimana hal ini sangat berguna sekali dalam bidang RC.
2. Kelemahan Batre LiPo
a. Harga baterai LiPo masih tergolong mahal jika dibandingkan dengan baterai jenis NiCad dan NiMH
b. Performa yang tinggi dari baterai LiPo harus dibayar dengan umur yang lebih pendek. Usia baterai LiPo sekitar 300-400 kali siklus 31 pengisian ulang. Sesuai dengan perlakuan yang diberikan pada beterai
c. Alasan keamanan, baterai LiPo menggunakan bahan elektrolit yang mudah terbakar.
d. Baterai LiPo membutuhkan penanganan khusus agar dapat bertahan lama. Charging, discharging, maupuan penyimpanan dapat mempengaruhi usia dari baterai jenis ini.
B. Perbedaan antara Baterai Lithium Ion (Li-Ion) dan Lithium Polymer (LiPo)
Menurut Musbikhin (2014:1)[15],”Dunia RC sekarang ini telah banyak didominasi oleh baterai jenis LiPo ketimbang Li-Ion.” Kedua baterai ini pada dasarnya dibuat menggunakan bahan kimia yang sama dan membutuhkan perhatian yang sama. Perbedaannya adalah pada pemaketan sel (cell) dan tipe elektronik yang digunakan.
1. Li-Ion
Baterai ini menggunakan cairan organik sebagai elektrolit. Elektrolit ini bertanggung jawab terhadap pertukaran ion antar elektroda (anoda dan katoda) sama seprti yang berlaku pada baterai biasa. Pelarut organik ini bersifat sangat mudah terbakar dan alasan mengapa baterai jenis ini sangat sensitif adalah karena selain dapat terbakar baterai ini juga dapat meledak jika tidak diperlakukan secara benar. Baterai Li-Ion biasanya dibungkus oleh metal yang keras (sekali lagi sama seperti baterai biasa) yang mengakibatkan bertambahnya bobot dan hanya tersedia dalam bentuk yang terbatas.

Gambar 2.28. Baterai Lithium Ion
2. LiPo
Baterai LiPo tidak menggunakan cairan sebagai elektrolit melainkan menggunakan elektrolit polimer kering yang berbentuk seperti lapisan plastik film tipis. Lapisan film ini disusun berlapis-lapis diantara anoda dan katoda yang mengakibatkan pertukaran ion. Dengan metode ini baterai LiPo dapat dibuat dalam berbagai bentuk dan ukuran. Diluar dari kelebihan arsitektur baterai LiPo, terdapat juga kekurangan yaitu lemahnya aliran pertukaran ion yang terjadi melalui elektrolit polimer kering. Hal ini menyebabkan penurunan pada charging dan discharging rate. Masalah ini sebenarnya bisa diatasi dengan memanaskan baterai sehingga menyebabkan pertukaran ion menjadi lebih cepat, namun metode ini dianggap tidak dapat untuk diaplikasikan pada keadaan sehari-hari. Seandainya para ilmuwan dapat memecahkan masalah ini maka risiko keamanan pada batera jenis lithium akan sangat berkurang.

Gambar 2.29 Baterai LiPo 3000 mAh
Remote Control Drone
A. Definisi Remote Control Drone
Menurut Herry Tjiang (2016:1)[10],“ Remote control yang dipakai untuk menggerakan drone dari jarak jauh biasa di sebut RC ini dipasangkan dengan device seperti smartpone, tablet, komputer yang dipakai untuk visualisasi dari drone itu sendiri dan memantau pergerakannya dari jarak jauh.” Remot Control adalah Sistem kendali jarah jauh yang digunakan untuk mengendalikan pesawat terbang, roket, perahu maupun mobil-mobilan sebenarnya merupakan contoh yang sederhana dari sistem pengendalian Fly by Wire tersebut. Sistem yang saat ini banyak ditemukan di pasaran menggunakan gelombang radio sebagai sistem penyampaian informasinya ini sudah dipergunakan orang sejak tahun 70-an. Berbeda dengan sistem remote control untuk alarm mobil atau untuk pengatur televisi yang umumnya menggunakan tombol tekan sebagai input pengendaliannya, sistem kendali radio atau yang selanjutnya disebut Radio Control disingkat R/C ini lebih banyak menggunakan potensiometer sebagai inputnya. Sistem R/C sebelumnya memang ditunjukan untuk keperluan militer, yakni untuk mengendalikan peluru kendali yang tidak berawak yang dilepaskan dari pesawat terbang untuk menghancurkan daerah lawan. Saat ini R/C sudah banyak digunakan orang untuk mengendalikan berbagai sistem, baik untuk keperluan riset, industri, rekreasi maupun keperluan rumah tangga. Berbagai jenis pesawat terbang model, Perahu, mobil-mobilan bahkan robot mainan saat inipun sudah banyak tersedia di toko-toko dengan dilengkapi radio control. Secara umum sistem R/C terdiri dari sebuah Pemancar atau Transmitter, sebuah atau lebih Penerima atau Receiver dan beberapa buah Servo sebagai penggerak. Baterai sebagai sumber daya diperlukan oleh bagian Pemancar maupun bagian Penerima. Pemancar atau Transmitter bertugas menerima perintah kendali dari orang yang mengendalikan dan merubahnya menjadi kode-kode elektronik dan mengirimkannya melalui gelombang radio ke udara. Bagian Penerima atau Receiver yng bertugas menerima informasi gelombang radio, menerjemahkan kode-kode elektroniknya menjadi perintah gerak yang dikirimkan ke servo. Selanjutnya Servo bertugas melaksanakan perintah gerak elektronik menjadi gerakan mekanik ke posisi tertentu yang diinginkan.
Seperti halnya sistem pemancar radio yang kita kenal saat ini, sistem R/C juga menggunakan berbagai metoda modulasi seperti halnya modulasi amplitudo (Amplitude Modulation disingkat AM), modulasi frekuensi (Frequency Modulation disingkat FM) dan modulasi kode pulsa ( Pulse Code Modulation disingkat PCM). Dari segi kualitas dan tentunya juga diikuti dengan harganya, R/C dengan gelombang FM lebih baik dibandingkan yang menggunakan gelombang AM. Sedangkan R/C yang menggunakan gelombang PCM memiliki sistem perlindungan agar tidak dapat di kacaukan oleh gelombang radio asing yang frekuensinya sama, sehingga sistem ini oleh banyak pihak dinilai lebih baik dari sistem R/C bergelombang FM. Saat ini ada beberapa bentuk R/C dikenal di kalangan pemakainya yakni para penggemar model, dilihat dari bentuk transmitter-nya yakni jenis tongkat atau Stick yang banyak dipakai untuk menerbangkan pesawat model, R/C jenis Pistol yang banyak ditemui di dunia mobil model serta Boat model dan R/C bertombol tekan (push on) yang banyak digunakan untuk pesawat terbang mainan anak-anak.
Range Frekuensi Kebanyakan sistem R/C yang dipasarkan saat ini di seluruh dunia menggunakan jalur frekuensi operasi 27 Mhz, 29 Mhz, 35 Mhz, 40 Mhz, 50 Mhz dan 72 Mhz serta 75 Mhz. Di dalam setiap jalur terdapat berpuluh-puluh kanal yang dapat digunakan diantaranya ada sekitar 5 kanal di frekuensi 27 Mhz, 50 kanal di frekuensi 29 Mhz dan lebih dari seratus kanal tersedia di frekuesi lainnya. Selisih frekuensi antara kanal satu dengan kanal lainnya adalah 20 kHz untuk radio type mutakhir dengan band width yang sempit. Jadi sebenarnya kemungkinan frekuensi R/C satu bentrok dengan frekuensi R/C lainnya adalah cukup kecil walaupun tetap ada saja kemungkinannya. Sebagai contoh jika R/C kita berfrekuensi 40.710 Mhz akan kita pergunakan maka di lapangan ada saja kemungkinanya seorang atau lebih menggunakan R/C yang ber frekuensi yang sama.
Daya jangkau Untuk R/C yang bekerja di jalur AM karena efeisiensi Tx-nya rendah, kebanyakan di produksi dengan daya 1 watt untuk menjangkau jarak kendali radius 1 km. Untuk R/C yang beroperasi dengan sistem modulasi FM maupun PCM umumya mempunyai daya pemancar 500 mW yang dapat menjangkau jarak kendali efektif yang sama sekitar 1 km radius. Jarak ini sudah cukup jauh sebenarnya mengingat bahwa jarak pandang normal kita terhadap pesawat model umumnya hanya sekitar 300 meter. Penggunaan baterainya relatif lebih hemat dibandingkan dengan R/C yang bekerja dengan gelombang AM. Beberapa R/C yang ditujukan untuk mengendalikan mobil model dirancang untuk mempunyai daya jangkau yang lebih pendek yakni 300 meter. Dengan kenyataan ini anda sebaiknya hati-hati jika akan menggunakan R/C mobil model anda untuk mengendalikan pesawat terbang model, sebab begitu pesawat terbang model anda mengudara semenit kemudian bisa-bisa sudah berada diluar jangkauan kendali (out of control).
Bila Frekuensi bentrok Memang kalau dilihat dari jalur frekuensi yang disediakan dan banyaknya kanal yang tersedia yang mungkin jumlahnya sudah mencapai ratusan, kelihatannya sudah agak sulit untuk menemui seseorang yang menggunakan radio control frekuensinya bentrok atau sama dengan radio control lain yang beroperasi di saat yang sama di tempat yang sama. Walaupun begitu yang namanya kemungkinan, tetap saja ada walaupun kecil. Nah kalau sudah terjadi dua buah R/C beroperasi pada suatu frekuensi kita harusnya mengetahui apa yang akan terjadi, dan seandainya mengandung resiko bagaimana tindakan kita untuk mencegah atau sedikitnya mengurangi resiko yang tidak kita inginkan.
Kalau sampai satu frekuensi digunakan oleh sebuah radio control kemudian ada R/C lain yang bekerja di frekuensi tersebut, maka akan terjadi suatu gejala yang di kalangan penggemar radio amatir dikenal dengan istilah Jamming atau beradu frekuensi. Mengingat bahwa radio control umumnya diproduksi dengan daya pancar yang sama yakni 500 mW, maka tidak dikenal istilah adu kekuatan pemancar sewaktu jamming. Yang ada hanyalah hadirnya gelombang interferensi yang membawa informasi kacau. Untuk R/C yang menggunakan gelombang transmisi PCM, kekacauan informasi yang diterima oleh Receiver akan disaring oleh sistem perlindungan fail safe-nya.
Sistem fail safe yang dimiliki oleh R/C yang beroperasi dengan gelombang PCM dapat mendeteksi kekacauan gelombang radio yang diakibatkan oleh jamming. Sistem ini selanjutnya memutuskan untuk tidak mengikuti dan mengabaikan informasi dari gelombang radio yang diterimanya. Berbeda dengan R/C yang beroperasi dengan gelombang AM maupun FM, yang tidak mempunyai sistem perlindungan seperti itu. Akibatnya gelombang interferensi akibat jamming akan diterima sebagai sinyal informasi dan diteruskan ke servo.
Beberapa prosedur keamanan yang dianjurkan untuk menanggulangi bentrokan frekuensi khususnya sebelum kita mengoperasikan radio control ini untuk misalnya menerbangkan pesawat terbang model atau helikopter. Yang pertama adalah dengan bertanya kepada rekan-rekan yang mengoperasikan R/C di lapangan apakah ada yang frekuensinya tepat sama dengan yang anda miliki. Jika tidak ada frekuensi yang sama dengan R/C anda maka dapat diambil kesimpulan R/C anda ini aman untuk dioperasikan. Cara lain yang bisa ditempuh adalah dengan menggunakan alat yang disebut monitor Frekuensi Radio Control. Alat ini berfungsi persis seperti radio penerima FM yang biasa kita dengarkan di rumah tiap hari. Dengan mengatur frekuensi-nya pada frekuensi R/C yang akan kita operasikan, monitor akan memperdengarkan gelombang yang memodulasi frekuensi tersebut jika memang ada. Jika ternyata tidak terdengar apa-apa, maka dapat dipastikan frekuensi tersebut aman untuk digunakan oleh R/C kita.
Meskipun pengecekan frekuensi sudah memberikan tanda aman, kita sebagai pengguna R/C untuk menerbangkan pesawat terbang model harus melakukan satu test lagi terhadap sistem kendali tersebut yakni yang disebut dengan pengecekan daya jangkau (range check). Caranya adalah dengan melihat bahwa dalam jarak minimal 30 meter antara pemancar dan penerimanya, perintah kemudi masih dapat diterima dan dilaksanakan dengan baik walaupun antena teleskopik pada pemancar tidak ditarik keluar. Dengan kondisi tanpa antena seperti itu R/C masih dapat beroperasi dengan baik pada jarak 30 meter, maka dapat diyakini apabila antenanya terpasang sistem kendali tersebut akan dapat menjangkau jarak radius 1 km dengan baik.
Programable Radio Sebagai sistem kendali, R/C diperlukan bersifat fleksible. Misalnya kita ingin menggerakkan kemudi arah belok ke kanan 20 derajat. Setelah tongkat kendali di pemancar kita gerakkan ke kanan 20 derajat ternyata kemudi arah di pesawat berbelok ke kanan 25 derajat. Jika kita menggunakan R/C yang bisa diprogram, maka dengan mudah gerakan kemudi arah tersebut kita kurangi menjadi 20 derajat dengan jalan merubah fungsi Adjustable Travel Volume disingkat ATV yang semula 100 persen menjadi 80 persen.
Saat ini ada sistem mekanik yang dikendalikan dengan R/C yakni model helikopter yang diterbangkan oleh para aeromodeler. Helikopter ini mempunyai sistem pengendalian yang sedikit kompleks. Masalahnya adalah bahwa di dalam sistem pengendalian helikopter terdapat 2 atau 3 fungsi yang harus bisa diaktifkan oleh satu buah stick kemudi. Sebagai gambaran, pada saat sudut pitch rotor utama di channel ke 6 ditambah, kita harus juga menambahkan daya ke engine di channel ke 3 dan juga menambahkan sudut pitch rotor belakang di channel ke 4. Jadi disini telah terjadi pencampuran antar channel. Pencampuran antara channel (mixing) ini sebenarnya bisa juga dilaksanakan di radio control biasa dengan bantuan beberapa buah konektor dan tuas-tuas tertentu. Tentu saja hal ini tidak praktis. Oleh karenanya untuk mengendalikan helikopter, sangatlah disarankan untuk menggunakan R/C yang bisa diprogram (programable radio). Beberapa contoh R/C yang bisa diprogram adalah Futaba 8 UHPS, Futaba 9 ZHPS, JR 388 S, JR PCM 10 S serta Airtronics Stylus 8Ch PCM dan FS-i6s.

Gambar 2.30 Remote Control FS-i6S
Konsep Dasar GPS dan Kompas
A. Definisi GPS
Menurut Adhinda Dinar (2016:1)[16], ”Global Positioning System (GPS), juga dikenal sebagai Navstar GPS atau hanya Navstar, adalah sistem satelit navigasi global (GNSS) yang mentukan letak di permukaan bumi dan waktu informasi ke penerima GPS di semua kondisi cuaca dengan bantuan penyelarasan sinyal satelit.” Sistem GPS diciptakan oleh Pemerintah Amerika Serikat dan membuatnya dapat siakses secara bebas oleh siapapun yang menginginkan akses GPS. Namun, pemerintah Amerika Serikat juga dapat menolak akses ke sistem, seperti yang terjadi pada militer India pada tahun 1999 selama Perang Kargil. Proyek GPS diluncurkan di Amerika Serikat pada tahun 1973 untuk mengatasi keterbatasan sistem navigasi sebelumnya.
B. Sejarah GPS
Desain GPS pada dasarnya serupa dengan sistem ground-based radio-navigation, seperti Loran dan Decca Navigator, yang dikembangkan pada awal tahun 1940-an digunakan oleh Angkatan Laut Kerajaan Inggris selama Perang Dunia II.
Pada tahun 1956, fisikawan Jerman-Amerika Friedwardt Winterberg mengusulkan uji relativitas umum - mendeteksi perlambatan waktu dalam medan gravitasi yang kuat menggunakan jam atom yang akurat ditempatkan di orbit dalam satelit buatan.
Uni Soviet meluncurkan satelit buatan manusia pertama, Sputnik 1, pada tahun 1957. Pada tahun 1967, Tentara Amerika Serikat mengembangkan satelit Timation, sebuah teknologi yang dibutuhkan oleh GPS.
Pada 1970-an, sistem navigasi ground-based OMEGA menjadi sistem navigasi radio pertama di dunia. Keterbatasan sistem ini mendorong kebutuhan untuk solusi navigasi yang lebih universal dengan akurasi yang lebih besar.
Pada tahun 1973, pertemuan sekitar dua belas perwira militer di Pentagon membahas penciptaan Pertahanan Navigasi Satelit Sistem (DNSS). Pada pertemuan ini sistesis nyata yang selanjutnya menjadi GPS telah dibuat. Akhir tahun 1973, prodram DNSS itu diberi nama NAVSTAR (Navigation System Using Timing and Ranging), yang selanjutnya dikenal sebagai NAVSTAR-GPS.
Prototipe satelit Block I pertama kali diluncurkan antara tahun 1978 sampai 1985 (beberapa unit tambahan hancur karena kegagalan peluncuran).
Pada tahun 1983, Presiden Ronald Reagan membuat arahan untuk membuat GPS dapat diakses untuk penggunaan sipil, agar dapat berguna bagi kepentingan umum. Satelit Blok II diluncurkan pada 14 Februari 1989, dan satelit 24 diluncurkan pada tahun 1994.
Awalnya, kualitas sinyal tinggi hanya disediakan untuk penggunaan militer saja, sedangkan untuk penggunaan sipil hanya disediakan sinyal dengan kualitas rendah. Hal ini berubah ketika Presiden Bill Clinton menandatangani kebijakan direktif pada tahun 1996, lalu pada Mei 2000 “Selektive Avability” dihentikan untuk memberikan presisi yang sama untuk warga sipil yang awalnya hanya diberikan kepada militer.
Sejak penyebaran nya, AS telah menerapkan beberapa perbaikan untuk layanan GPS termasuk sinyal baru untuk penggunaan sipil dan meningkatkan akurasi dan integritas untuk semua pengguna, sambil mempertahankan kompatibilitas dengan peralatan GPS yang ada.
Pada tahun 2004, Pemerintah Amerika Serikat menandatangani perjanjian dengan Komunitas Eropa membangun kerjasama yang terkait dengan sistem Galileo. November 2004, Qualcomm mengumumkan keberhasilan menguji GPS untuk ponsel.
Pada tanggal 25 Februari 2010, Angkatan Udara AS memberikan kontrak untuk mengembangkan GPS Next Generation, Pengendalian Operasional Sistem (OCX) untuk meningkatkan akurasi dan ketersediaan sinyal navigasi GPS, dan berfungsi sebagai bagian penting dari modernisasi GPS
C. Devinisi Kompas
Menurut Andry Candra (2012:1)[17], “Kompas merupakan salah satu penemuan penting dari perkambaangan ilmu pengetahuan manusia, kompas adalah salah satu alat navigasi yang mampu menentukan arah keberadaan seseorang dan mampu menunjukkan arah.” Penemuan kompas pertama adalah kompas magnetik, kompas ini merupakan hasil penemuan mengenai medan magnet besar yang berada di dalam bumi, yang diduga akibat dari pergeseran inti cair dan semi cair yang berada dalam pusat bumi (150 fahrul). Kompas ini pertama kali ditemukan pada abad ke-6 dan ditemukan oleh orang Cina kemudian digunakan oleh orang Eropa yakni Christoper Columbus yang menggunakan kompas sebagai alat navigasi pengganti alam, sehingga Christoper Columbus mampu menemukan benua Amerika.

Gambar 2.31 Module GPS Include Kompas
Konsep Dasar Kamera
A. Definisi Kamera
Menurut Dharsito (2015:10)[18], dalam buku nya Dasar Fotografi Digital Pengenalan Kamera, “Kamera Digital adalah kamera yang tidak tergantung pada film negative (klise).” Pada kamera digital, peran film negative diambil oleh sebuah chip berebentuk kartu kecil yang berfungsi untuk menyimpan hasil pemotretan. Kamera adalah alat paling populer dalam aktivitas fotografi. Nama ini didapat dari camera obscura, bahasa Latin untuk "ruang gelap", mekanisme awal untuk memproyeksikan tampilan di mana suatu ruangan berfungsi seperti cara kerja kamera fotografis yang modern, kecuali tidak ada cara pada waktu itu untuk mencatat tampilan gambarnya selain secara manual mengikuti jejaknya. Dalam dunia fotografi, kamera merupakan suatu peranti untuk membentuk dan merekam suatu bayangan potret pada lembaran film. Pada kamera televisi, sistem lensa membentuk gambar pada sebuah lempeng yang peka cahaya. Lempeng ini akan memancarkan elektron ke lempeng sasaran bila terkena cahaya. Selanjutnya, pancaran elektron itu diperlakukan secara elektronik. Dikenal banyak jenis kamera potret.
B. Sejarah Kamera
Kamera berawal dari sebuah alat serupa yang dikenal dengan Kamera Obscura yang merupakan kotak kamera yang belum dilengkapi dengan film untuk menangkap gambar atau bayangan. Pada abad ke 16 Girolamo Cardano melengkapi kamera obscura dengan lensa pada bagian depan kamera obscura tersebut. Meski demikian, bayangan yang dihasilkan ternyata tidak tahan lama, sehingga penemuan Girolamo belum dianggap sebagai dunia fotografi. Pada tahun 1727 Johann Scultze dalam penelitiannya menemukan bahwa garam perak sangat peka terhadap cahaya namun dia belum menemukan konsep bagaimana langkah untuk meneruskan gagasannya.
Pada tahun 1826, Joseph Nicepore Niepce mempublikasikan gambar dari bayangan yang dihasilkan kameranya, yang berupa gambaran kabur atap-atap rumah pada sebuah lempengan campuran timah yang dipekakan yang kemudian dikenal sebagai foto pertama. Kemudian, pada tahun 1839, Louis Daguerre mempublikasikan temuannya berupa gambar yang dihasilkan dari bayangan sebuah jalan di Paris pada sebuah pelat tembaga berlapis perak. Daguerre yang mengadakan kongsi pada tahun 1829 dengan Niepce meneruskan program pengembangan kamera, meski Niepce meninggal dunia pada 1833, mengembangkan kamera yang dikenal sebagai kamera daguerreotype yang dianggap praktis dalam dunia fotografi, dimana sebagai imbalan atas temuannya, Pemerintah Perancis memberikan hadiah uang pensiun seumur hidup kepada Daguerre dan keluarga Niepce. Kamera daguerreotype kemudian berkembang menjadi kamera yang dikembangkan sekarang.

Gambar 2.32 Kamera B-PRO 5
Konsep Dasar Gimbal Kamera
A. Definisi Gimbal
Menurut Herry Tjiang (2016:1)[10], “Adalah system penstabil dari camera, juga sebagai penghubung antara drone dan camera bentuknya masing masing berbeda tetapi memiliki kegunaan yang sama yaitu membuat stabil pengambilan foto atau video dengan menggunakan drone sehingga guncangan dari drone, dan angin tidak membuat foto mejadi goyang atau blur.” Gimbal adalah alat yang memungkinkan merotasi objek pada sumbu tunggal. Satu set tiga gimbal, satu dipasang di sisi lain dengan orthogonal sumbu poros, dapat digunakan untuk memungkinkan sebuah objek yang dipasang di gimbal terdalam untuk tetap independen dari rotasi dukungan (misalnya vertikal dalam animasi pertama). Sebagai contoh, di sebuah kapal, yang giroskop, kapal kompas, kompor, dan bahkan pegangan minuman biasanya menggunakan gimbal untuk menjaga mereka tegak sehubungan dengan cakrawala meskipun kapal pitching dan bergulir. Suspensi gimbal yang digunakan untuk pemasangan kompas dan seperti kadang-kadang disebut suspensi Cardan setelah Italia matematika dan fisika Girolamo Cardano (1501-1576) yang dijelaskan secara rinci. Namun, Cardano tidak menciptakan gimbal itu, ia juga tidak mengaku. Perangkat ini telah dikenal sejak jaman dahulu dan mungkin tidak memiliki penemu diidentifikasi tunggal.

Gambar 2.33 Gimbal Kamera BGC 2D
Gimbal juga digunakan untuk me-mount segala sesuatu dari kecil lensa kamera untuk teleskop besar fotografi.Dalam portable fotografi peralatan, satu-sumbu kepala gimbal digunakan untuk memungkinkan gerakan yang seimbang untuk kamera dan lensa. Ini membuktikan berguna dalam fotografi satwa liar serta dalam kasus lain di mana lensa tele sangat panjang dan berat yang diadopsi: kepala gimbal berputar lensa sekitar pusat gravitasinya, sehingga memungkinkan untuk manipulasi mudah dan halus sementara pelacakan subjek bergerak.Gunung gimbal yang sangat besar dalam bentuk 2 atau 3 sumbu gunung ketinggian-ketinggian digunakan dalam fotografi satelit untuk tujuan pelacakan.Gimbal Gyrostabilized yang rumah beberapa sensor juga digunakan untuk aplikasi udara surveilans termasuk: penegakan hukum udara, pipa dan kabel listrik pemeriksaan, pemetaan, dan ISR (intelijen, pengintaian, dan pengawasan). Sensor termasuk thermal imaging, siang hari, kamera cahaya rendah serta laser range finder, dan iluminator. Handheld 3-axis gimbal yang digunakan dalam sistem stabilisasi dirancang untuk memberikan operator kamera kemerdekaan shooting genggam tanpa kamera getaran atau goyangan. Didukung oleh tiga motor brushless, yang gimbal memiliki kemampuan untuk menjaga tingkat kamera pada semua sumbu sebagai operator kamera bergerak kamera. Gerakan pengukuran inersia (IMU) merespon gerakan dan menggunakan tiga motor yang terpisah untuk menstabilkan kamera.
Dengan bimbingan algoritma, stabilizer mampu melihat perbedaan antara gerakan yang disengaja seperti panci dan tembakan pelacakan dari goyang yang tidak diinginkan. Hal ini memungkinkan kamera untuk tampak seolah-olah itu mengambang melalui udara, efek yang dicapai oleh Steadicam di masa lalu. Tidak terbatas pada penembakan genggam, gimbal dapat dipasang ke mobil dan kendaraan lainnya seperti drone, di mana getaran atau gerakan tak terduga lainnya akan membuat tripod atau gunung kamera lainnya tidak dapat diterima
Konsep Dasar Transmitter dan Receiver
A. Definisi Transmitter
Menurut Deni Prasetya (2014:1)[19], “Transmitter (Pengirim) Biasanya data yang dibangkitkan dari sistem sumber tidak ditransmisikan secara langsung dalam bentuknya aslinya.” Sebuah trasmitter cukup memindah dan menandai informasi dengan cara yang sama seperti menghasilkan sinyal-sinyal elektro-magnetik yang dapat ditrasmisikan melewati beberapa sistem transmisi berurutan. Contoh : Sebuah modem tugasnya menyalurkan suatu digital bit stream dari suatu alat yang sebelumnya sudah dipersiapkan misalnya PC (Personal Computer), dan mentransformasikan bit stream tersebut menjadi suatu sinyal analog yang dapat melintasi jaringan telepon.
B. Definisi Receiver
Menurut Deni Prasetya (2014:1)[19], “Receiver menerima sinyal dari sistem transmisi dan menggabungkannya ke dalam bentuk tertentu yang dapat ditangkap oleh tujuan.” Contoh : modem akan menerima sinyal analog yang datang dari jaringan atau jalur transmisi dan mengubahnya menjadi suatu digital bit stream.
Video receiver digunakan untuk menerima sinyal dari pemancar video dan disambungkan ke monitor untuk melihat hasil video dari atas udara. Video Receiver bisa satu atau dua antena. Receiver dengan dua antena dapat beralih ke antena dengan penerimaan yang lebih baik dan gunakan antena directional untuk jarak yang lebih jauh.

Gambar 2.34. Transmiter dan RC 808
Konsep Dasar Power Module
A. Devinisi Power Module
Menurut Caesar Wiratama (2016:1),[12],Power modul digunakan untuk merubah voltase baterai yang tinggi menjadi sesuai yang dibutuhkan oleh autopilot (biasanya 5 Volt)”.

Gambar 2.35 Power Module
Power modul ini juga berguna untuk mengukur kondisi baterai, hal ini penting untuk sistem failsafe (perintah untuk mengakhiri misi terbang melalui way-point, misalkan landing otomatis atau kembali ke arah pilot), sehingga ketika baterai sudah lemah, drone akan otomatis mengambil tindakan darurat/failsafe.
Konsep Dasar Telemetry
A. Devinisi Telemetry
Menurut Caesar Wiratama (2016:1),[12],Modul telemetry adalah alat yang mengirimkan dan menerima data melalui sinyal radio. Salah satu berada di darat dan salah satunya terpasang pada pesawat”.

Gambar 2.36 Telemetry
Telemetry (sejenis dengan telematika) adalah sebuah teknologi yang memungkinkan pengukuran jarak jauh dan pelaporan informasi kepada perancang atau operator sistem. Kata telemetri berasal dari akar bahasa Yunani tele = jarak jauh, dan metron = pengukuran. Sistem yang membutuhkan instruksi atau data yang dikirim kepada mereka untuk mengoperasikan membutuhkan lawan dari telemetri, telekomando. Telemetri merujuk pada komunikasi nirkabel (contohnya menggunakan sistem radio untuk mengimplementasikan hubungan data), tetapi juga dapat merujuk pada data yang dikirimkan melalui media lain, seperti telepon atau jaringan komputer atau melalui sebuah kabel optik atau ketika membuat robot kita dapat menggunakan satu kabel.
Konsep Dasar Arduino Pro Mini
A. Devinisi Arduino
Arduino Pro Mini adalah papan pengembangan (development board) mikrokontroler yang berbasis chip ATmega328P dengan bentuk yang sangat mungil dan paling minimalis. Secara fungsi tidak ada bedanya dengan Arduino Uno, dan sangat mirip dengan Arduino Nano. Perbedaan utama terletak pada ketiadaan jack power DC dan konektor Mini-B USB, sehingga harus menggunakan modul FTDI atau USB to TTL untuk menghubungkan ke komputer. Disebut sebagai papan pengembangan karena board ini memang berfungsi sebagai arena prototyping sirkuit mikrokontroller. Dengan menggunakan papan pengembangan, anda akan lebih mudah merangkai rangkaian elektronika mikrokontroller dibanding jika anda memulai merakit ATMega328 dari awal di breadboard. Terdapat dua versi Arduino Pro Mini. Versi 3.3 volt dan versi 5 volt, yang dipilih menurut kebutuhan rangkaian mikrokontroller yang anda gundakan.
Tabel 2.1 Spesifikasi Arduino Pro Mini
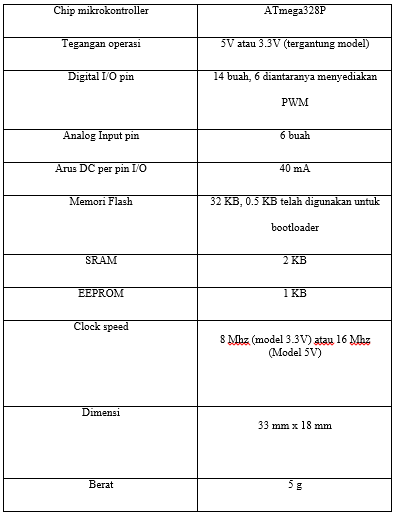
Arduino Pro Mini adalah hardware open source (OSH - Open Source Hardware), pertama kali di desain oleh Sparkfun Electronics. Karena OSH, dengan demikian anda dan siapapun diberi kebebasan untuk dapat membuat sendiri Arduino Pro Mini. Pemrograman board Arduino Pro Mini dilakukan dengan menggunakan Arduino Software (IDE). Chip ATmega328 yang terdapat pada Arduino Nano telah diisi program awal yang sering disebut bootloader. Bootloader tersebut yang bertugas untuk memudahkan anda melakukan pemrograman lebih sederhana menggunakan Arduino Software, tanpa harus menggunakan tambahan hardware lain. Yang dibutuhkan hanyalah board FTDI atau USB to Serial seperti yang ini, lalu hibungkan ke PC, Mac, atau Linux anda, jalankan software Arduino Software (IDE), dan anda sudah bisa mulai memrogram chip ATmega328. Lebih mudah lagi, di dalam Arduino Software sudah diberikan banyak contoh program yang memanjakan anda dalam belajar mikrokontroller.
Arduino Pro Mini adalah hardware open source (OSH - Open Source Hardware), pertama kali di desain oleh Sparkfun Electronics. Karena OSH, dengan demikian anda dan siapapun diberi kebebasan untuk dapat membuat sendiri Arduino Pro Mini. Pemrograman board Arduino Pro Mini dilakukan dengan menggunakan Arduino Software (IDE). Chip ATmega328 yang terdapat pada Arduino Nano telah diisi program awal yang sering disebut bootloader. Bootloader tersebut yang bertugas untuk memudahkan anda melakukan pemrograman lebih sederhana menggunakan Arduino Software, tanpa harus menggunakan tambahan hardware lain. Yang dibutuhkan hanyalah board FTDI atau USB to Serial seperti yang ini, lalu hibungkan ke PC, Mac, atau Linux anda, jalankan software Arduino Software (IDE), dan anda sudah bisa mulai memrogram chip ATmega328. Lebih mudah lagi, di dalam Arduino Software sudah diberikan banyak contoh program yang memanjakan anda dalam belajar mikrokontroller.
Untuk pengguna mikrokontroller yang sudah lebih mahir, anda dapat tidak menggunakan bootloader dan melakukan pemrograman langsung via header ICSP (In Circuit Serial Programming) dengan menggunakan Arduino ISP.
Development Board Arduino Pro Mini dapat diberi tenaga dengan power yang diperoleh dari board FTDI atau USB to Serial, atau via board power supply breadboard pada papan breadboard anda. Beberapa pin power pada Arduino Pro Mini :
• GND. Ini adalah ground atau negatif.
• VCC. Power supply ter regulasi 3.3V atau 5V (tergantung model)
• RAW. Ini adalah pin untuk memberikan raw voltage
• 3V3. Ini adalah pin output dimana pada pin tersebut disediakan tegangan 3.3V yang telah melalui regulator
Chip ATmega328 pada Arduino Pro Mini memiliki memori 32 KB, dengan 0.5 KB dari memori tersebut telah digunakan untuk bootloader. Jumlah SRAM 2 KB, dan EEPROM 1 KB, yang dapat di baca-tulis dengan menggunakan EEPROM library saat melakukan pemrograman.
Arduino Pro Mini memiliki 14 buah digital pin yang dapat digunakan sebagai input atau output, sengan menggunakan fungsi pinMode(), digitalWrite(), dan digital(Read). Pin-pin tersebut ekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi discconnect). Nilai maximum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroller Beberapa pin memiliki fungsi khusus :
• Serial, terdiri dari 2 pin : pin 0 (RX) dan pin 1 (TX) yang digunakan untuk menerima (RX) dan mengirim (TX) data serial.
• External Interrups, yaitu pin 2 dan pin 3. Kedua pin tersebut dapat digunakan untuk mengaktifkan interrups. Gunakan fungsi attachInterrupt()
• PWM: Pin 3, 5, 6, 9, 10, dan 11 menyediakan output PWM 8-bit dengan menggunakan fungsi analog Write()
• SPI : Pin 10 (SS), 11 (MOSI), 12 (MISO), dan 13 (SCK) mendukung komunikasi SPI dengan menggunakan SPI Library
• LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh digital pin no 13.
Arduino Pro Mini memiliki 8 buah input analog, yang diberi tanda dengan A0 hingga A7. Masing-masing pin analog tersebut memiliki resolusi 10 bits (jadi bisa memiliki 1024 nilai). Secara default, pin-pin tersebut diukur dari ground ke 5V, namun bisa juga menggunakan pin REF dengan menggunakan fungsi analog Reference().
Pin Analog A6 dan A7 tidak bisa dijadikan sebagai pin digital, hanya sebagai analog. Beberapa pin lainnya pada board ini adalah :
• I2C : Pin A4 (SDA) dan A5 (SCL). Pin ini mendukung komunikasi I2C (TWI) dengan menggunakan Wire Library.
• Reset. Hubungkan ke LOW untuk melakukan reset terhadap mikrokontroller. Biasanya digunakan untuk dihubungkan dengan switch yang dijadikan tombol reset.
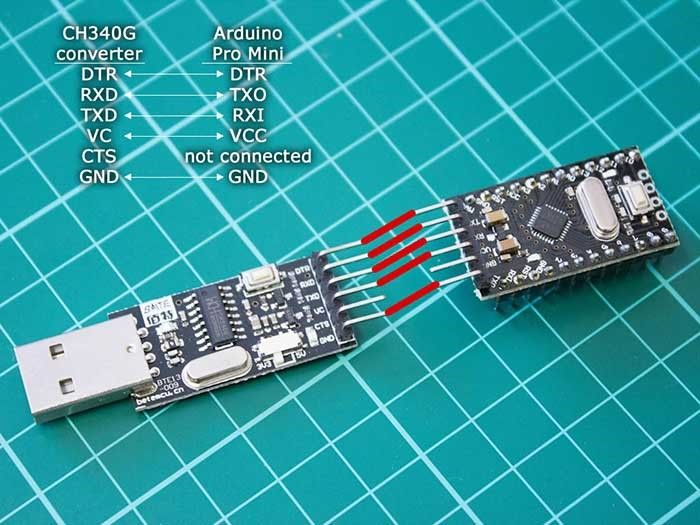
Gambar 2.37 Arduino Pro Mini
Arduino Nano 3.0 memiliki beberapa fasilitas untuk berkomunikasi dengan komputer, berkomunikasi dengan Arduino lainnya, atau dengan mikrokontroller lain nya. Chip Atmega328 menyediakan komunikasi serial UART TTL (5V) yang tersedia di pin 0 (RX) dan pin 1 (TX). Sebuah chip FTDI yang terdapat pada board berfungsi menterjemahkan bentuk komunikasi ini melalui USB dan akan tampil sebagai Virtual Port di komputer
Pada Arduino Software (IDE) terdapat monitor serial yang memudahkan data textual untuk dikirim menuju Arduino atau keluar dari Arduino. Lampu led TX dan RX akan menyala berkedip-kedip ketika ada data yang ditransmisikan melalui chip FTDI USB to Serial via kabel USB ke komputer. Untuk menggunakan komunikasi serial dari digital pin, gunakan SoftwareSerial library.
Chip ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Di dalam Arduino Software (IDE) sudah termasuk Wire Library untuk memudahkan anda menggunakan bus I2C. Untuk menggunakan komunikasi SPI, gunakan SPI library.
Biasanya, ketika anda melakukan pemrograman mikrokontroller, anda harus menekan tombol reset sesaat sebelum melakukan upload program. Pada Arduino Pro Mini, hal ini tidak lagi merepotkan anda. Arduino Uno telah dilengkapi dengan auto reset yang dikendalikan oleh software pada komputer yang terkoneksi. Salah satu jalur flow control (DTR) pada Arduino Pro Mini terhubung dengan jalur reset pada ATmega328 melalui sebuah kapasitor 100 nF. Ketika jalur tersebut diberi nilai LOW, mikrokontroller akan di reset. Dengan demikian proses upload akan jauh lebih mudah dan anda tidak harus menekan tombol reset pada saat yang tepat seperti biasanya.
Walaupun berbentuk sangat mungil dan tampak begitu minimalis, Arduino Pro Mini tetap memiliki fasilitas yang sama dengan yang ditawarkan oleh Arduino Uno, minus konektor USB dan Jack power. Dengan kelebihan nya tersebut, Arduino Pro Mini sangat cocok untuk anda yang membutuhkan board mikrokontroller yang tidak banyak memakan tempat namun tetap powerful. Anda bisa memperoleh board Arduino Pro Mini
Literatur Review
A. Definisi Literature Review
Menurut Warsito, dkk (2015:29)[20], “Metode study pustaka dilakukan untuk menunjang metode survei dan observasi yang telah dilakukan. Pengumpulan informasi yang dibutuhkan dalam mencari referensi- referensi yang berhubungan dengan penelitian yang dilakukan.”
Menurut Hermawan dalam Tiara (2013:75)[21], "Tinjauan pustaka adalah menganalisis secara kritis pustaka penelitian yang ada saat ini. Tinjauan pustaka tersebut perlu dilakukan secara ketat."
Dari definisi yang dijelaskan di atas maka dapat di simpulkan bahwa Literature Review merupakan suatu metode penelitian yang digunakan untuk mengumpulkan informasi mengenai penelitian dan pada kasus yang sejenis.
Manfaat dari literature review ini antara lain :
1. Mengidentifikasikan kesenjangan (identify gaps) dari penelitian ini.
2. Menghindari membuat ulang (reinventing the wheel) sehingga banyak menghemat waktu dan juga menghindari kesalahan-kesalahan yang pernah dilakukan oleh orang lain.
3. Mengidentifikasi metode yang pernah dilakukan dan yang relevan terhadap penelitian ini.
4. Meneruskan apa yang penelitian sebelumnya telah dicapai sehingga adanya studi pustaka ini, penelitian yang akan dilakukan dapat membangun diatas landasan (platform) dari pengetahuan atau ide yang sudah ada.
Dalam upaya mengembangkan dan menyempurnakan Alat ini perlu dilakukan study pustaka (Literature Review) sebagai salah satu dari penerapan metode penelitian yang akan dilakukan. Diantaranya yaitu :
1. Penelitian ini dilakukan oleh Maulida Ningsih S dan Ikhwansyah Isranuri (2012), dari Universitas Sumatra Utara Medan (USU Medan), pada Jurnal e-Dinamis Volume 1, No. 1 yang berjudul “ANALISA KEKUATAN MATERIAL EXPANDED POLYOLEFIN (EPO) FOAM PADA PESAWAT AEROMODELLING MELALUI UJI TARIK DAN IMPAK”. Penelitian ini membahas tentang material yang dipakai untuk pembuatan pesawat. Melalui pengujian tarik dan impak, mulai dari pembentukan model uji sebanyak 3 (tiga) spesimen untuk pengujian tarik dan 3 (tiga) spesimen untuk pengujian impak sampai pada hasil pengujian yang menunjukkan sifat mekanis dan karakteristik dari EPO foam.
2. Penelitian dilakukan oleh Budi Purwanto (2012) dari Lembaga Penerbangan dan Antariksa Nasional (LAPAN) pada Jurnal Teknologi Dirgantara Vol 10 no. 1 yang berjudul “PEMODELAN SISTEM DAN ANALISIS KESTABILAN DINAMIK PESAWAT UAV (MODELING SYSTEM AND DYNAMIC STABILITY ANALYSIS OF UAV)” Penelitian ini membahas tentang kestabilan pada drone. Permasalahan pada UAV adalah munculnya gangguan (disturbance), adanya kesalahan pengukuran sensor (noise), multi masukan dan keluaran (MIMO), serta ketidakpastian model dinamik.
3. Penelitian dilakukan oleh CP Reghunadhan Nair ...(2013) dari Indian Institute of Space Science and Technology pada Journal of Energy and Chemical Engineering yang berjudul “Effect of Process Parameters on the Viscosity of AP/Al/HTPB Based Solid Propellant Slurry”. Penelitian ini membahas tentang pengaruh proses parameter berdasarkan propeller. Dimana adanya keterkaitan proses parameter dan propeller yang mempengaruhi kinerja pesawat.
4. Penelitian dilakukan oleh Asif Sajjad Khan Anjum Salman Afghani, Mati-ur-Rehman, Muhammad Safwan Yaseen Khan and Muhammad Arslan (2013) dari Army Public College of Management and Sciences, Rawalpindi, Pakistan pada International Journal of Advanced Science and Technology dengan judul “Auto Pilot System for Small Helicopter Type UAV with Three Independent Control Systems”. Penelitian ini membahas tentang sistem auto pilot yang diterapkan diarmada helicopter dengan menggunakan tiga kontrol sistem diantaranya Altitude control module, Spin lock module dan Horizontal drift control module.
5. Penelitian ini dilakukan oleh Jan Skoda and Roman Bartak (2015) dari Charles University in Prague dengan judul “Camera-Based Localization and Stabilization of a Flying Drone”. Penelitian ini membahas tentang kestabilan kamera saat drone diterbangkan untuk Simultan Lokasi dan Pemetaan.
Dari 5 literature review diatas, dapat diketahui bahwa penelitian tentang drone sudah banyak di bahas. Maka dari itu penulis mengambil acuan pada literature review no 5 dengan judul “CAMERA-BASED LOCALIZATION AND STABILIZATION OF A FLYING DRONE” yang membahas tentang kestabilan kamera untuk pemetaan dan menentukan lokasi. Sedangkan penelitian yang saya buat yaitu untuk mengontrol suatu lingkungan yang menghasilkan video atau gambar yang langsung terkoneksi ke pengguna (pilot).
BAB III
Gambaran Umum Instansi
Gambaran Umum Perguruan Tinggi Raharja
Dengan makin maraknya perguruan tinggi lain di daerah Tangerang, khususnya dalam bidang komputer, ternyata masih belum dapat memenuhi kebutuhan masyarakat akan informasi yang telah terkomputerisasi.
Instansi pemerintahan maupun swasta sangat cepat sekali perkembangannya, sehingga selalu berubah setiap saat. Oleh karena itu, Perguruan Tinggi Raharja dalam pendiriannya mempunyai misi untuk membantu program pemerintahan dalam upaya mencerdaskan kehidupan bangsa Indonesia serta meningkatkan sumber daya manusia (SDM) dalam menghadapi era globalisasi.
Perguruan Tinggi Raharja saat ini terdiri dari dua institusi pendidikan, yaitu AMIK Raharja Informatika dan STMIK Raharja.
Sejarah Singkat Perguruan Tinggi Raharja
Perguruan Tinggi Raharja bermula dari sebuah lembaga kursus komputer yang bernama LPPK (Lembaga Pendidikan dan Pelatihan Komputer) Raharja yang terletak di Jl. Gatot Subroto Km.2 Harmoni Mas Cimone Tangerang.
LPPK Raharja diresmikan pada tanggal 3 Januari 1994 oleh Bapak Walikota Tangerang yang saat itu di jabat oleh Drs. H. Zakaria Machmud, Raharja telah terdaftar pada Depdiknas Kotamadya Tangerang dengan Nomor 201/PLSM/02.4/L.93. Lembaga inilah yang mempelopori penggunaan Operating System Windows dan aplikasinya di wilayah Tangerang dan sekitarnya, hal tersebut mendapat respon positif dan jumlah peminatnya pun meningkat pesat seiring dengan kerjasama yang dilakukan oleh lembaga ini dengan Sekolah Lanjutan Tingkat Atas yang ada di Tangerang.
Karena semakin pesatnya perkembangan dan pertumbuhan akan komputerisasi dan meningkatnya peminat masyarakat Tangerang maka pada tanggal 24 Maret 1999 LPPK Raharja berkembang menjadi Akademi Manajemen Informatika dan Komputer (AMIK) Raharja Informatika yang diresmikan melalui Surat Keputusan Menteri Pendidikan dan Kebudayaan Republik Indonesia Nomor: 56/D/O/1999 yang diserahkan langsung dari Bapak Prof. Dr. Udju D. Rusdi selaku Koordinator KOPERTIS wilayah IV Jawa Barat kepada Ketua Yayasan Nirwana Nusantara Ibu Kasarina Sudjono. Pada tanggal 2 Februari 2000, dengan menyelenggarakan jurusan Manajemen Informatika.
Pada tanggal 2 Februari 2000 AMIK Raharja Informatika menjadi satu-satunya perguruan tinggi yang menjalankan studi formal untuk program Diploma I (DI) dengan memberikan gelar Ahli Pratama dan Program Diploma II (DII) dengan memberikan gelar Ahli Muda dan Diploma III (DIII) dengan memberikan gelar Ahli Madya kepada lulusannya. sesuai dengan Surat Keputusan Koordinator Perguruan Tinggi Swasta wilayah IV Jawa Barat dengan Nomor 3024/004/KL/1999.
Kemudian pada tanggal 7 September 2000 sesuai dengan surat keputusan Direktur Jendral Pendidikan Tinggi Departemen Pendidikan Nasional Nomor 354/Dikti/Kep/2000, menambah 2 program yakni D3 Teknik Informatika dan D3 Komputerisasi Akuntansi.
Kini AMIK Raharja Informatika mempuanyai 3 (tiga) program studi Diploma III dengan jurusan Manajemen Informatika (MI), Teknik Informatika (TI) dan Komputerisasi Akuntansi (KA) yang masing-masing jurusan memberikan gelar Ahli Madya (A.md), Ahli Muda (AM), dan Ahli Pratama (AP) kepa lulusannya.
Pada tanggal 20 Oktober 2000 dalam usahanya untuk meningkatkan mutu dan kualitas daripada lulusan, AMIK RAHARJA INFORMATIKA meningkatkan statusnya dengan membuka Sekolah Tinggi Manajemen Informatika dan Komputer (STMIK) RAHARJA. Dengan surat keputusan Nomor 42/01/YNN/PR/II/200, ketua Yayasan Nirwana Nusantara mengajukan permohonan pendirian STMIK RAHARJA kepada Mendiknas KOPERTIS Wilayah IV Jawa Barat dengan 3 (tiga) program studi SI jurusan Sitem Informasi (SI), Teknik Informatika (TI) dan Sistem Komputer (SK). Hal tersebut telah mendapat tanggapan dari Direktur Jendral Pendidikan Tinggi dengan surat keputusan Nomor 5706/D/T/2000.
Program Pascasarjana Magister Teknik Informatika (MTI) Perguruan Tinggi Raharja diselengarakan dan dikelola oleh manajemen yang telah berpengalaman selama 17 tahun dalam menyelenggarakan pendidikan tinggi, mendapatkan Akreditasi unggulan dari BAN-PT, bekerjasama dengan berbagai lembaga Internasional, memiliki fasilitas yang mendukung dan juga memperoleh hak paten. Pada tanggal 8 Mei 2013 berdasarkan keputusan Menteri Pendidikan dan Kebudayaan Nomor 179/E/O/2013 tentang izin penyelenggaraan program studi teknik informatika program magister (S-2) pada STMIK Raharja. Perguruan Tinggi Raharja merintis program Magister Teknik Informatika (MTI) yang berorientasi profesi, artinya pendidikan yang menitik beratkan pada aspek-aspek penerapan teknologi informasi dalam berbagai bidang keilmuan baik yang berlatar belakang IT maupun non-IT.
Tidak hanya sampai disini, dalam rangka meningkatkan mutu dan kualitas lulusan RAHARJA sesuai dengan Rencana Induk Pengembangan (RIP) Raharja, bahwa dalam kurun waktu tidak lebih dari 5 tahun sudah berdiri Universitas RAHARJA.
Pada saat ini, Perguruan Tinggi Raharja pun telah meningkatkan mutu dan kualitasnya melalui Sertifikat Akreditasi, diantaranya yaitu sebagai berikut:
1. Pada tanggal 5 April 2006 dengan Sertifikat Akreditasi Nomor 00117/Ak-I-DIII-03/DFXMEI/IV/2002 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma III Manajemen Informatika di AMIK Raharja Informatika terakreditasi B.
2. Pada tanggal 4 Mei 2006 dengan Sertifikat Akreditasi Nomor 08479/Ak-X-S1-001/CAGTLF/V/2006 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Strata 1 Teknik Informatika di STMIK Raharja terakreditasi B.
3. Pada tanggal 11 Mei 2006 dengan Sertifikat Akreditasi Nomor 08523/Ak-X-S1-002/CAGSIM/V/2006 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Strata 1 Sistem Informasi di STMIK Raharja terakreditasi B.
4. Pada tanggal 3 Agustus 2007 dengan Sertifikat Akreditasi Nomor 006/BAN-PT/AK-VII/DPI-III/VIII/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma III Manajemen Informatika di AMIK Raharja Informatika terakreditasi B.
5. Pada tanggal 25 Agustus 2007 dengan Sertifikat Akreditasi Nomor 019/BAN-PT/AK-X/S1/VIII/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Strata 1 Sistem Komputer di STMIK Raharja terakreditasi B.
6. Pada tanggal 29 Desember 2007 sesuai Surat Keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 017/BAN-PT/AK-VII/Dpl-III/XII/2007 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma Tiga Teknik Informastika di AMIK Raharja Informatika dengan terakreditasi B.
7. Pada tanggal 18 Januari 2008 sesuai Surat Keputusan oleh Badan Akreditasi Nasional Perguruan Tinggi (BAN-PT) dengan Nomor 019/BAN-PT/AK-VII/Dpl-III/I/2008 yang berisi Badan Akreditasi Nasional Perguruan Tinggi menyatakan bahwa program studi Diploma Tiga Komputerisasi Akuntansi di AMIK Raharja Informatika terakreditasi A.
8. Pada tahun 2009 Perguruan Tinggi Raharja berhasil dalam Verifikasi dan Tersertifikasi ISO 9001:2008 (Sistem Manajemen Mutu Raharja) dari Lloyd Register Quality Assurance (LRQA-UKAS). Untuk menambah wawasan dibidang IT serta memperkenalkan AMIK Raharja Informatika dan STMIK Raharja terhadap dunia luas, pada tahun 2009 diselenggarakan International Conference on Creative Communication and Innovative Technology 2009 (ICCIT) yang diikuti oleh para kandidat Doktor dibidang IT dari dalam dan luar negeri.Dan pada tahun ini pun Perguruan Tinggi Raharja mendapatkan penghargaan Juara II tingkat Provinsi Banten untuk Kategori Penghijauan dan Kebersihan
9. Pada tahun 2011 Program Studi Teknik Informatika Jenjang Sarjana sesuai dengan SK BAN-PT 010/BAN-PT/Ak-XIV/S1/VII/2011 mendapatkan peringkat “B” dan pada tahun yang sama Program Studi Sistem Informasi jenjang Sarjana sesuai dengan SK BAN-PT 025/BAN-PT/Ak-XIV/S1/IX/2011 mendapatkan peringkat “B”. Untuk meningkatkan mutu pembelajaran, Perguruan Tinggi Raharja membuat terobosan baru dengan membuka perkuliahan iLearning.
10. Pada tahun 2012 Program Studi Diploma Tiga Manajemen Informatika sesuai dengan SK BAN-PT No. SK.019/BAN-PT/Ak-XII/Dpl-III/III/2012 dengan nilai mendapatkan peringkat “A”. Perguruan Tinggi Raharja terus berupaya menyiapkan sarana penunjang kebutuhan Infornasi dan pengembangan Teknologi Informasi guna mendukung layanan Civitas Perguruan Tinggi Raharja, atas dedikasi ini Perguruan Tinggi Raharja mendapatkan menghargaan TESCA 2012, peringkat 60 besar perguruan tinggi skala nasional.
11. Upaya untuk menjaga mutu, dengan diperolehnya ISO 9001:2008 pada tahun 2009 dan renewal tahun 2013 dengan Approval Certificate No: JKT6007007. Pada Tahun 2013 Perguruan Tinggi Raharja memperoleh penghargaan TESCA 2013, peringkat 3 besar kategori Sekolah Tinggi skala nasional.
<p style="text-indent: 3em"12. Pada tahun 2014 diselenggarakan MMSP 2014 di Perguruan Tinggi Raharja. MMSP 2014 merupakan workshop Internasional ke-16 Multimedia Signal Processing yang diselenggarakan oleh IEEE Signal Processing Society pada tanggal 22–24 September 2014. Pada tahun ini Perguruan Tinggi Raharja membuka perkuliahan iLearning Plus dan kelas Executive dengan memberikan kesempatan kepada masyarakat yang ingin bergabung bersama Perguruan Tinggi Raharja karena keterbatasan waktu kuliah.</p>
13. Akreditasi Institusi Perguruan Tinggi (AIPT) dengan Peringkat B, Oktober 2015, kerja sama dengan Sun Moon University, Korea, yang dituangkan dalam Memorandum of Understanding untuk kerja sama dalam bidang Pendidikan, Riset, dan Pertukaran Budaya, Oktober 2015 dan renewal Sertifikasi ISO 9001:2008 Ketiga, Nopember 2015.
14. Pada tahun 2016 adanya pembentukan TUK (Tempat Uji Kompetensi) Raharja telah ditanda-tangani MoU (Memorandum of Understanding) antara LSP INFORMATIKA (Lembaga Sertifikasi Profesi) dengan PERGURUAN TINGGI RAHARJA pada tanggal 5 Februari tentang PROGRAM PEMBENTUKAN DAN PENYELENGGARAAN TEMPAT UJI KOMPETENSI (TUK) PERGURUAN TINGGI RAHARJA, Nomor : 003/MOU/LSP-INFORMATIKA-PT/II/2016.
Visi, Misi dan Tujuan Perguruan Tinggi Raharja
A. Visi Perguruan Tinggi Raharja
Visi Raharja ialah menjadi Perguruan Tinggi swasta yang secara berkesinambungan meningkatkan kualitas pendidikan, memberikan pelayanan dalam menciptakan sumber daya manusia yang tangguh, memiliki daya saing yang tinggi dalam era globalisasi terutama yang terkait dan ditunjang oleh berbagai bentuk penerapan dibidang teknologi informasi dan komputer. Menjadikan Pribadi Raharja sebagai sumber daya manusia terampil dan ahli, mampu bersaing dalam dunia bisnis maupun non bisnis, menghasilkan tenaga intelektual dan profesional, serta mampu berkembang dalam cakrawala yang lebih luas.
B. Misi Perguruan Tinggi Raharja
Misi Raharja senantiasa akan berupaya untuk melaksanakan misinya antara lain sebagai berikut:
1. Menyelenggarakan program - program studi yang menunjang pengembangan dan penerapan Teknologi Informasi dalam berbagai bidang ilmu.
2. Menyediakan sarana dan lingkungan yang kondusif bagi pelaksanaan kegiatan belajar - mengajar yang efektif dan efisien, sehingga terbentuk lulusan - lulusan yang bermoral, terampil, dan kreatif.
3. Menjaga keterkaitan dan relevansi seluruh kegiatan akademis dengan kebutuhan pembangunan sosial ekonomi dan industri indonesia, serta mengantisipasi semakin maraknya globalisasi kehidupan masyarakat.
4. Melangsungkan kerjasama dengan berbagai pihak dari dalam maupun luar negeri, sehingga Ilmu dan Teknologi yang diberikan selalu mutakhir serta dapat diterapkan secara berhasil-guna dan tepat-guna.
C. Tujuan Perguruan Tinggi Raharja
1. Menghasilkan lulusan yang memiliki kemampuan akademik dan dapat menerapkan, mengembangkan serta memperluas informatika dan komputer secara profesional.
2. Menghasilkan lulusan yang mampu mengadakan penelitian dalam bidang informatika dan komputer, yang hasilnya dapat diimplementasikan untuk memenuhi kebutuhan masyarakat di lapangan.
3. Menghasilkan lulusan yang mampu mengabdikan pengetahuan dan keterampilan dalam bidang informatika dan komputer secara profesional kepada masyarakat.
Struktur Organisasi
Dalam suatu instansi, struktur organisasi merupakan hal yang sangat penting. Karena dengan memiliki struktur organisasi yang baik, maka fungsi-fungsi manajemen akan dapat dijalankan dengan baik pula. Sehingga dalam hal ini diperlukan adanya suatu hubungan kerjasama yang baik antara bagian yang terkait.
Struktur organisasi, tercermin dalam suatu bagan organisasi yang menunjukkan adanya pembagian tugas dan wewenang serta aturan-aturan yang berlaku dan prosedur yang ada termasuk komunikasi dan arus kerja.
Sama halnya dengan Perguruan Tinggi Raharja yang mempunyai struktur organisasi manajemen sebagai berikut:
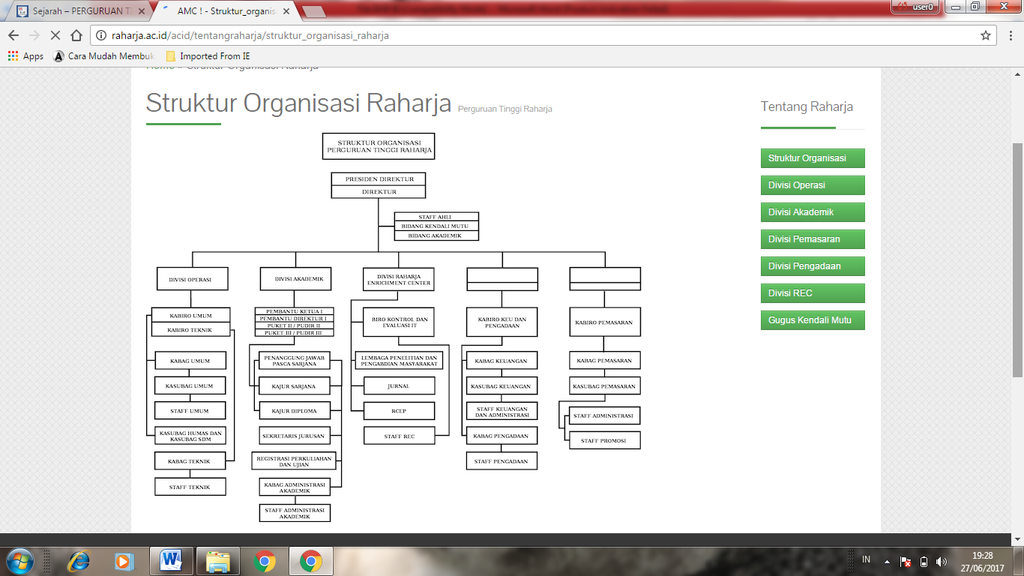
Gambar 3.1 Struktur Organisasi Perguruan Tinggi Raharja
Tugas dan Tanggung Jawab
Seperti halnya dengan sebuah perusahaan, Perguruan Tinggi Raharja dalam manajemen akademiknya terdapat bagian-bagian yang mempunyai wewenang serta tanggung jawab dalam menyelesaikan semua pekerjaannya.
Wewenang dan Tanggu Jawab
Seperti halnya dengan sebuah perusahaan, Perguruan Tinggi Raharja dalam manajemen akademiknya terdapat bagian-bagian yang mempunyai wewenang serta tanggung jawab dalam menyelesaikan semua pekerjaannya.
Wewenang serta tanggung jawab bagian-bagian yang ada pada Perguruan
Tinggi Raharja adalah sebagai berikut :
- Presiden Direktur
- Direktur
- Asisten Direktur Akademik
- Kepala Jurusan
Wewenang dan Tanggung Jawab:
a. Menetapkan visi misi, tujuan dan strategi kampus.
b. Menetapkan kebijakan umum berdasarkan kebijakan pemerintah dan arahan badan penyelenggara.
c. Memimpin Penyelenggaran dan pembangunan pendidikan dan pengajaran, penelitian dan pengabdian kepada masyarakat, pembinaan aktivasi akademik baik pegawai penunjang, akademik maupun pegawai administrasi.
Wewenang
a. Menyelanggarakan program kerja yang berpedoman pada visi, misi, fungsi dan tujuan pendirian Perguruan Tinggi Raharja.
b. Menyelenggarakan kegiatan dan pengembangan pendidikan, penelitian serta pengabdian pada masyarakat.
c. Menyelenggarakan kegiatan pengembangan administrasi
d. Menyelenggarakan kegiatan – kegiatan yang menunjang terwujudnya Tri Darma Perguruan Tinggi.
e. Tanggung Jawab Memimpin Penyelanggaraan pendidikan pada jenjang Diplima, penelitian, pengabdian kepada masyarakat
Wewenang
a. Mengusulkan kepada Direktur atas prosedur pelaksanaan proses belajar mengajar.
b. Mengusulkan kepada Direktur tentang kenaikan honor staf binaannya.
c. Mengusulkan kepada Direktur tentang pengangkatan, pemberhentian staf binaannya
d. Memberikan kebijakan pelaksanaan layanan pada bidangnya.
e. Mengusulkan kepada Direktur tentang unit layanaan baru yang dibutuhkan.
f. Memberikan sangsi kepada staf binaannya yang melanggar tata tertib karyawan.
g. Mengusulkan kepada Direktur tentang pengangkatan dan pemberhentian dosen.
Tanggung Jawab
a. Bertanggung jawab atas penyusunan JRS yang efektif dan efisien.
b. Bertanggung jawab atas pengimplementasian pelaksanaan proses belajar mengajar.
c. Bertanggung jawab atas kemajuan kualitas pelayanan Akademik yang berkesinambungan.
d. Bertanggung jawab atas kelancaran proses belajar mengajar.
Wewenang
a. Mengusulkan kepada Asisten Direktur Akademik tentang perubuhan mata kuliah dan materi kuliah yang dianggap telah kadaluarsa Kurikulum Jurusan.
b. Mengusulkan kepada Asisten Direktur Akademik Tentang kenaikan honor dosen binaannya.
c. Mengusulkan kepada Asisten direktur Akademik tentang pengadaan seminar, pelatihan, penambahan kelas perkuliahan, pengangkatan dosen baru, pemberhentian dosen.
e. Mengusulkan kepada Asisten Direktur Akademik tentang pembukaan peminatan/konsentrasi baru dalam jurusannya.
f. Memberikan sangsi Akademik kepada mahasiswa yang melanggar tata tertib Perguruan Tinggi Raharja.
Tujuan Perancangan
Tujuan perancangan sistem keamanan menggunakan quadcopter ini diharapkan memberikan dampak positif diantaranya adalah:
1. Memantau langsung keadaan dari udara sehingga memudahkan dan lebih menghemat waktu
2. Memberikan kemudahan ke staff keamanan dalam mengontrol lingkungan kampus
3. Menghemat biaya untuk merekrut tambahan staff keamanan.
Langkah-langkah Perancangan
Dalam perancangan sistem controlling keamanan ini menggunakan metode perancangan sebagai berikut :
- Perancangan Sistem Mekanik
- Perancangan Sistem Elektronik
Metode perancangan yang digunakan adalah metode perancangan Flowchart terlebih dahulu yang didesain sesuai cara kerja sistem.
"Metode perancangan menggunakan Diagram Blok, karena metode ini dimaksudkan untuk alat apa saja yang digunakan dan bagaimana sistem itu dirancang. Pada pembuatan alat ini, penulis menggunakan alat seperti : Arducopter sebagai flightcontrol-nya untuk mengendalikan fungsi drone
Diagram Blok
Dalam perancangan ini dibutuhkan beberapa komponen elektronika, perlengkapan mekanik dan device penunjang agar sistem dapat bekerja dan berjalan dengan baik sesuai dengan fungsinya, Agar mudah dipahami maka penulis membuat diagram blok dan alur kerjanya:

Gambar 3.2 Diagram Blok Rancangan Alat
Keterangan dan penjelasan beserta uraian deskripsi kerja pada Diagram Blok diatas adalah sebagai berikut :
1. Arducopter sebagai Flight Control atau otak inti dari semua alat untuk memasukkan program ke dalam Mikrokontroler yang merupakan pusat pengontrolan Drone yang terdapat program didalamnya.
2. Baterai merupakan catu daya untuk memberikan tegangan dan menjadi bagian inti untuk memberikan daya kepada Arducopter.
3. Power Module digunakan untuk mengatur voltase baterai sesuai yang dibutuhkan oleh Flight Control.
4. GPS Include Kompas merupakan sensor yang berfungsi untuk menentukan arah dan posisi drone berada.
5. Electronic Speed Controller atau ESC merupakan sirkuit elektronik dengan tujuan untuk bervariasi sebuah motor listrik kecepatan, arah dan mungkin juga bertindak sebagai rem secara dinamis.
6. Motor Brushless merupakan alat yang memutarkan baling-baling agar drone dapat terbang maju mundur, ke kiri dan ke kanan sesuai perintah dari remote control.
7. Modul Telemetry sebagai alat yang mengirimkan dan menerima data melalui sinyal radio yang berfungsi untuk mengukur jarak jauh dan informasi kepada operator sistem.
8. Video Transmitter sebagai alat yang mengirimkan dan menerima data berupa Video yang dihasilkan dari kamera.
9. Kamera berfungsi untuk meliput video secara langsung diudara dan kemudian disalurkan ke video transmitter dan dipancarkan kemonitor pengguna (Pilot).
Cara Kerja Alat
Input, Proses dan Output
A. Input
Proses input terjadi pada saat Remote Control terhubung dengan Flight Control (Ardcopter) yang berfungsi sebagai pengendali drone dan kamera yang terpasang pada drone menjadi input untuk mengirimkan data berupa video melalui video transmitter.
B. Proses
Pada saat salah satu tombol di remote control ditekan, maka tombol tersebut akan mengolah data yang diberikan lalu mengirimkan olahan data tersebut ke Flight Control (Ardcopter), setelah proses tersebut Flight Control akan memerintahkan Motor yang kemudian akan menggerakkan baling-baling. Kamera mengirim berupa sinyal frekuensi melalui video transmitter ke video receiver yang berada di ground.
C. Output
Setelah terjadi input dan proses pada drone, maka output sudah dapat dihasilkan. Yaitu, pengguna dapat melihat video pada laptop yang dihasilkan dari video receiver dan Motor pada drone akan berputar, selain itu motor berfungsi untuk memutarkan baling-baling agar drone dapat terbang maju dan mundur serta untuk bergerak ke kanan dan kiri.
Pembuatan Alat
Dalam perancangan Alat dibutuhkan beberapa komponen dan device untuk penunjang agar alat dapat berjalan dengan baik dan sesuai dengan fungsinya. Gambaran secara umum berupa diagram blok rancangan alat seperti yang di tunjukkan pada gambar 3.2. adapun alat dan bahan sebagai berikut:
A. Software yang digunakan
1. Software Mission Planner
2. Software Arduino IDE
B. Alat-alat yang digunakan
1. Laptop
2. Solder timah
c. Bahan-bahan yang digunakan
1. Flight Controller (Arducopter)
2. Frame S500
3. Electronic Speed Controller
4. Brushless Motor
5. GPS include Kompas
6. Baterai LiPo 3000 mah
7. Remot Kontrol Transmitter dan Receiver
8. Baling-baling
9. Telemetri Transmitter dan Receiver
10. Power Modul
11. Transmitter Video dan Receiver Video
12. TV Tuner
13. Arduino Pro Mini
14. MPU6050
15. Motor Servo
16. Gimbal/Bracket Kamera
17. FTDI Basic Programmer
18. Kamera
Perangkat Keras (Hardware)
Dalam perancangan perangkat keras (Hardware) penulis menggunakan diagram blok sebagai acuan dan mempermudah dalam menjelaskan. Diagram blok dapat dilihat digambar 3.2. pada gambar diagram blok terdapat konfigurasi seluruh rangkaian yang digunakan.
A. Skema Rangkaian Flight Controller
Flight Controller pada drone berfungsi untuk menjadi otak inti dari semua alat. Flight Controller menjadi elemen yang sangat penting, ada banyak port yang berada flight controller untuk lebih jelasnya dapat dilihat pada gambar dibawah ini.
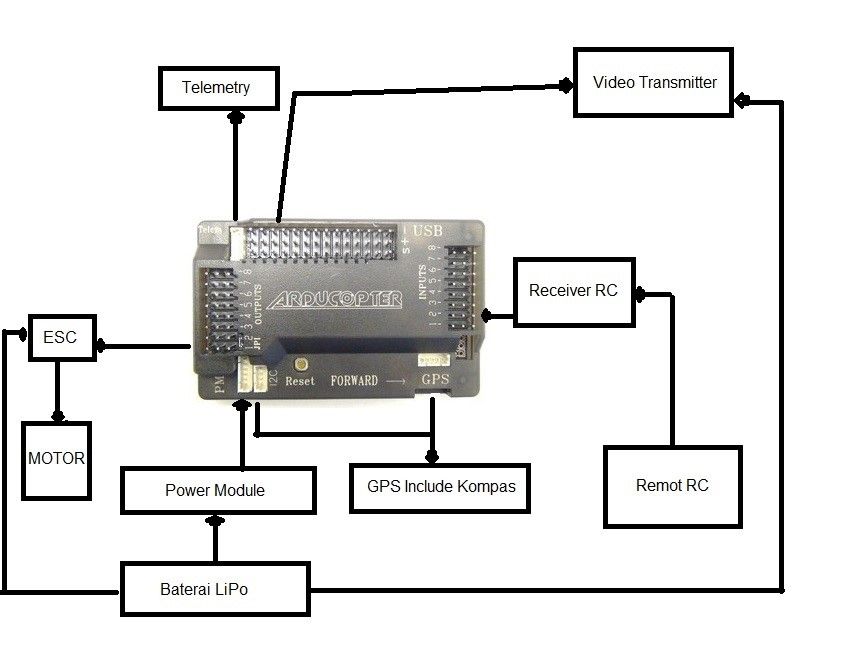
Gambar 3.3 Skema Rangkaian Arducopter
B. Skema Rangkaian Video Transmitter dan Receiver
Dalam rangkaian Video Transmitter ini tidak banyak pin yang digunakan, yang dibutuh kan hanya, Pin TX dan Pin RX untuk komunikasi data dengan Flight Controller dan daya baterai. Dalam Rangkaian Receiver butuh alat tambahan seperti TV Tuner.
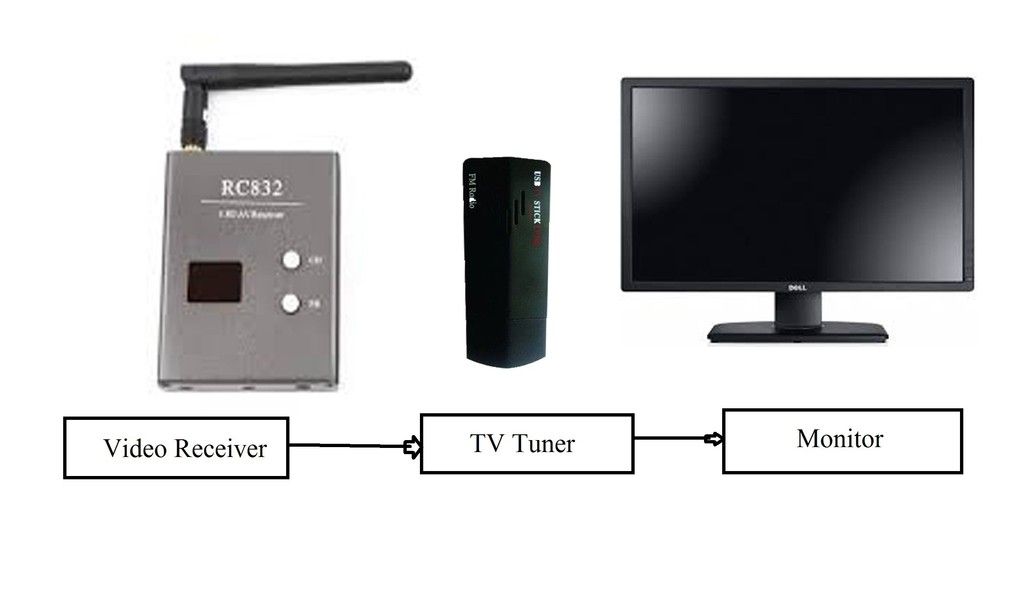
Gambar 3.4 Skema Rangkaian Video Receiver (RX)
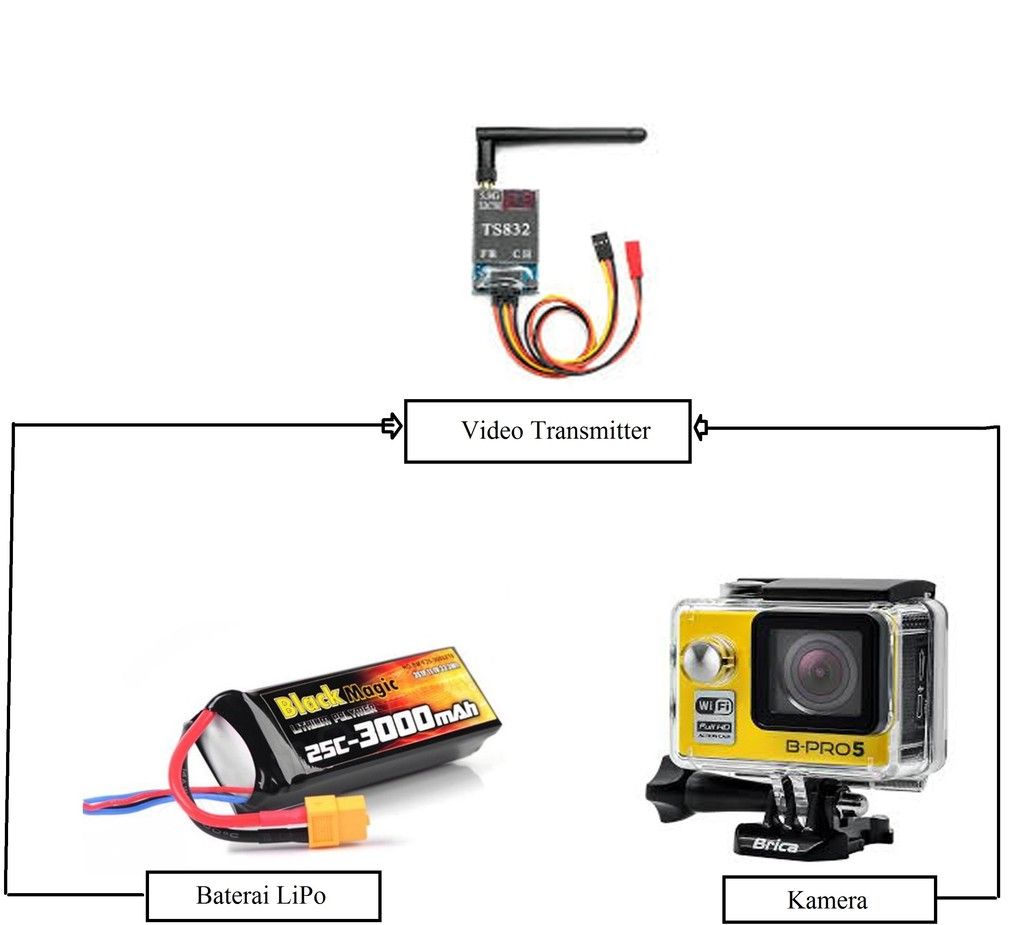
Gambar 3.5 Skema Rangkaian Video Transmitter (TX)
C. Gimbal Kamera
Gimbal Kamera bagian yang sangat dibutuhkan karena hasil video tidak akan bagus dikarenakan banyaknya angin yang menyebabkan getaran pada drone saaat diudara dan kamera tidak stabil. Pada penelitian ini pembuatan gimbal kamera akan menggunakan Arduino Pro Mini sebagai pengendali semua komponen gimbal seperti MPU6050, Servo dan Bracket kamera. Untuk lebih jelasnya dapat dilihat pada gambar dibawah ini.
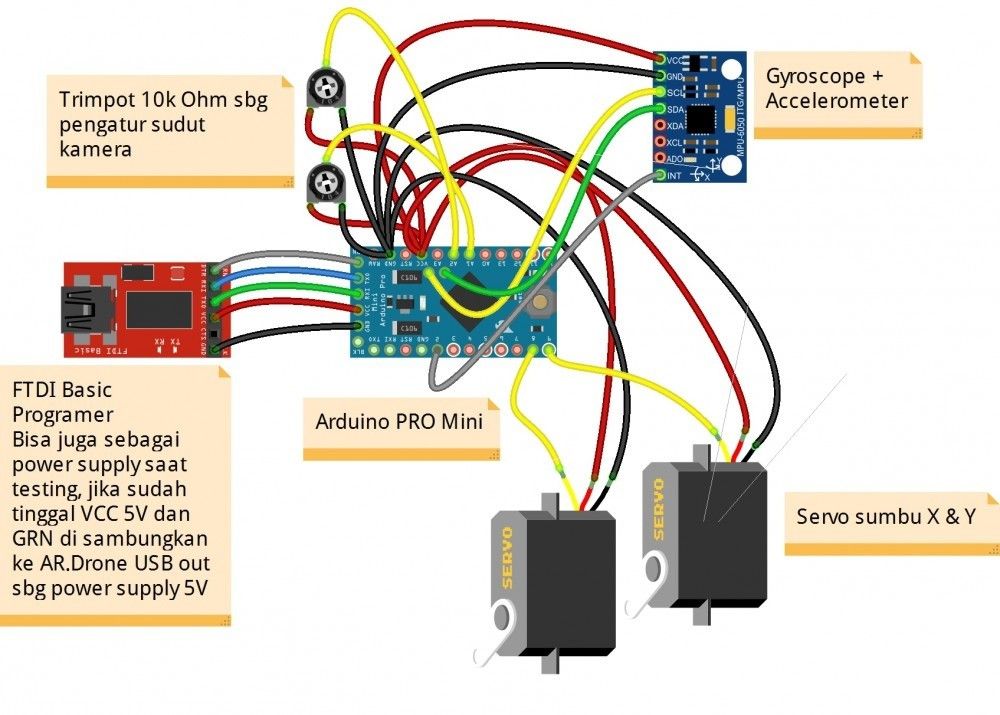
Gambar 3.6. Skema Rangkain Gimbal Kamera
D. Catu Daya
Catu daya merupakan bagian yang sangat penting. Karena tanpa adanya catu daya, maka semua rangkaian tidak akan berjalan. Rangkaian ini berfungsi untuk mensuplay tegangan keseluruh rangkaian yang ada. rangkaian catu daya yang dibuat mempunyai keluaran 0 sampai 12 Volt digunakan untuk mensuplay tegangan ke motor brushless tergantung naik turunnya throtlle. 5 volt digunakan untuk mensuplay tegangan ke komponen arducopter dan 12 volt untuk Video Transmitter. Rangkaian catu daya ditunjukan pada gambar 3.....
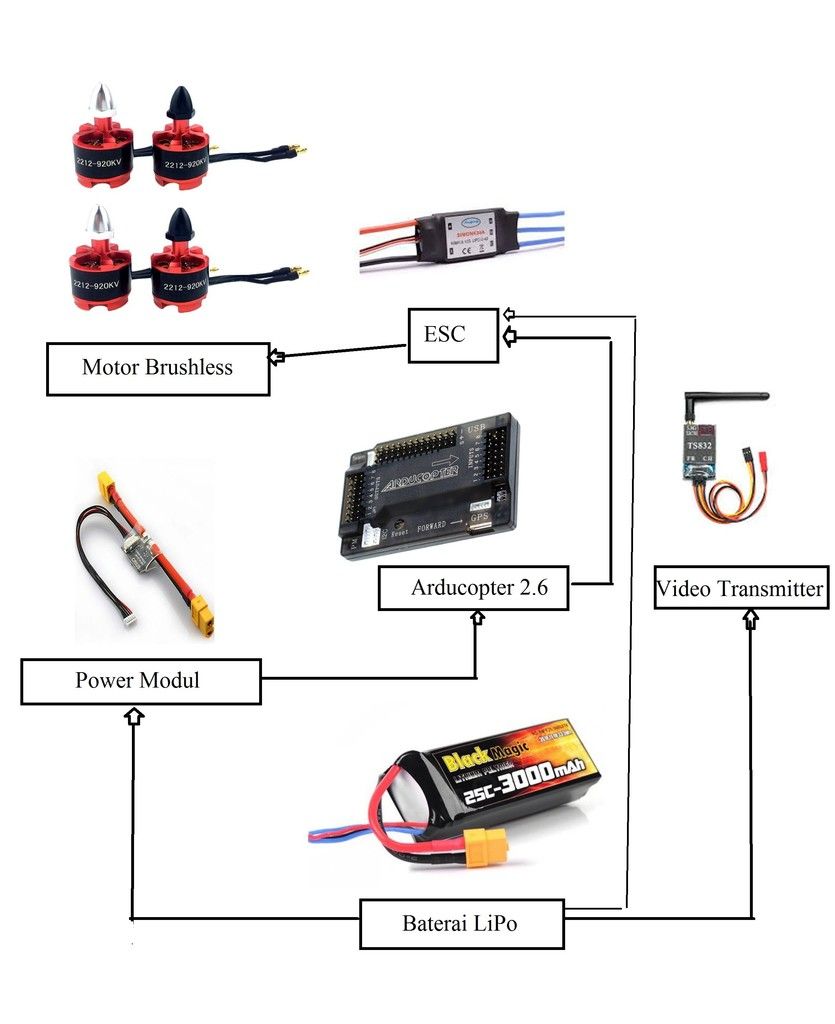
Gambar 3.7. Skema Rangkaian Catu Daya
Perangkat Lunak (Software)
A. Perancangan Software Mission Planner
Setelah proses perancangan perangkat keras selanjutnya adalah membuat perancangan perangkat lunak, Penulis menggunakan Software Mission Planner dimana perintah-perintah program akan di eksekusi oleh hardware. Software MP ini merupakan salah satu software yang dirancang untuk mempermudah user dalam perencanaan terbang otomatis dan biasanya digunakan untuk pemetaan. Sehingga perhitungan manual tentang skala, resolusi spasial, ketinggian, nilai overlap dan sidelap, dan lainnya bisa didapatkan hasil perhitungan secara otomatis. Perencanaan seperti ini termasuk pada tahap Pra-akuisisi data (persiapan sebelum penerbangan). Mari kita mengenal terlebih dahulu MP ini, berikut ini adalah tampilan awal dari MP
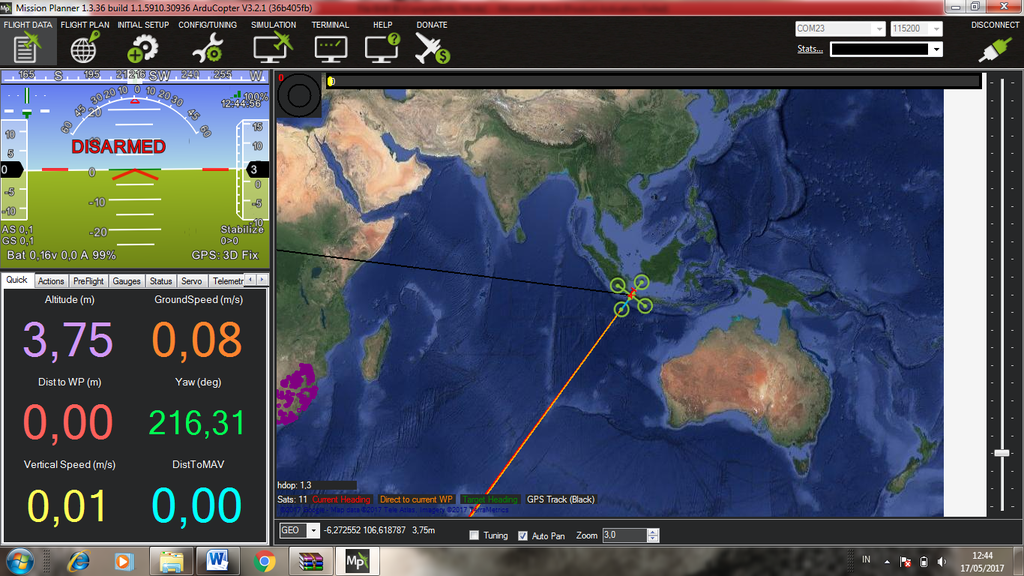
Gambar 3.8. Tampilan Mission Planner
1. Install firmware
Agar dapat menggunakan Software Mission Planner langkah awal kita harus install firmware terlebih dahulu caranya adalah sebagai berikut:
1. Buka Mission Planner lalu pilih Initial Setup → install firmware
2. Lalu pilih sala satu gambar sesuai armada yang kita pakai
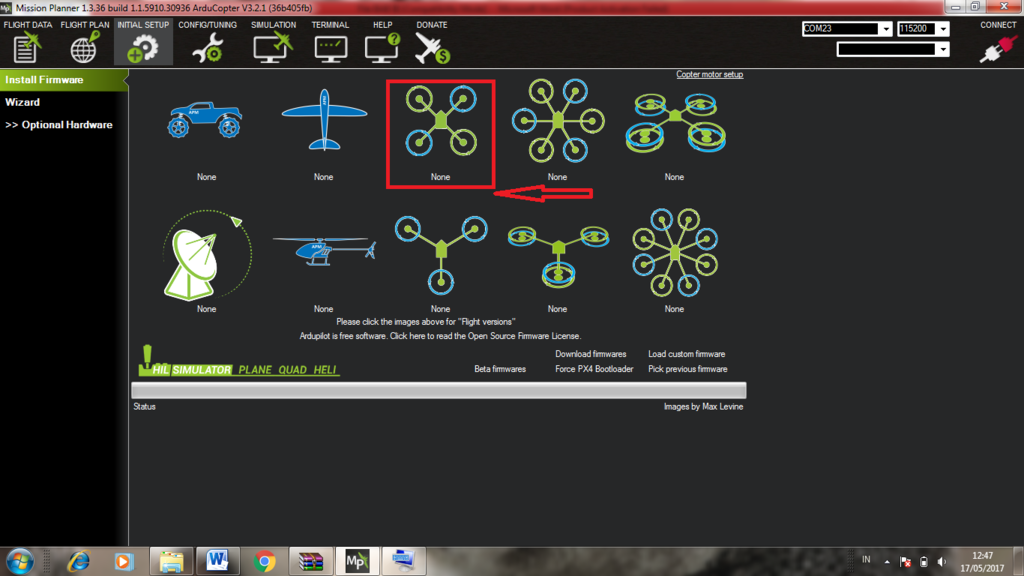
Gambar 3.9. Langkah Awal Install Firmware
3. Install firmware akan berjalan dan tunggu sampai selesai.
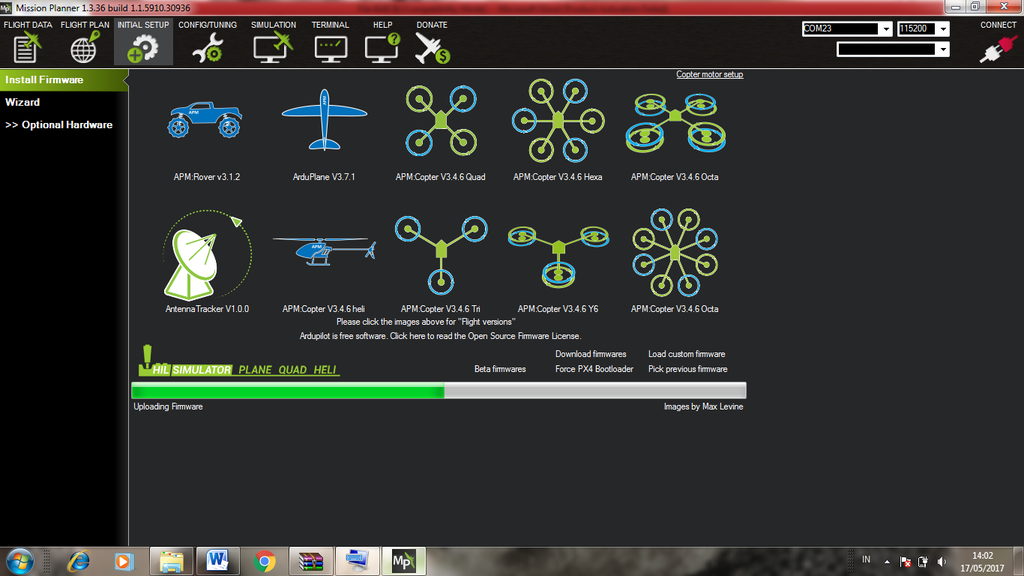
Gambar 3.10. Proses Install Firmware
2. Kalibrasi Accelerometer
Accelerometer mengukur percepatan translasi agar berjalan sesuai fungsinya perlu adanya kalibrasi agar singkron dengan remot kontrol. Berikut tahap-tahapannya :
Klik Initial Setup → Mandatory Hardware → select Accel Calibration
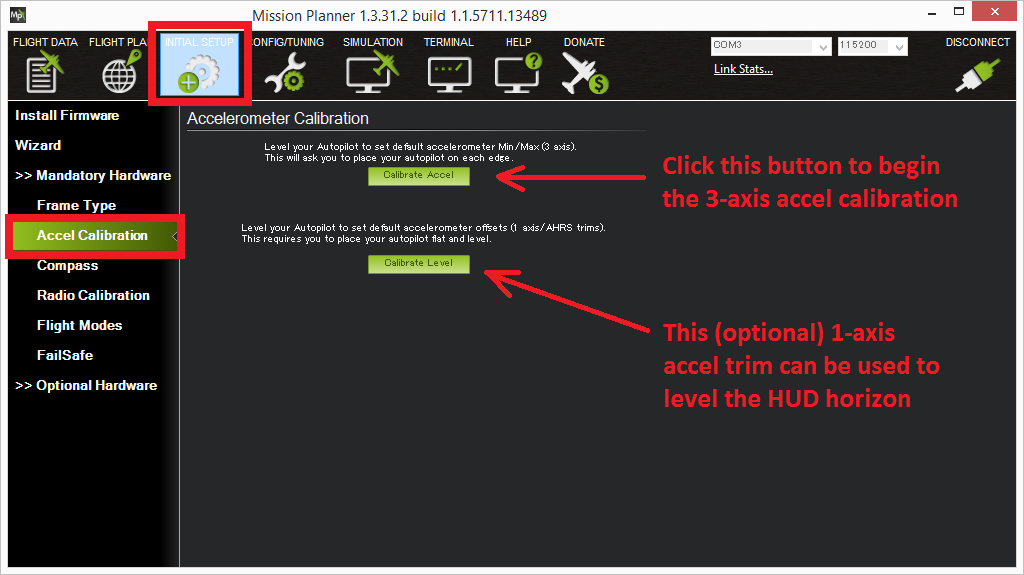
Gambar 3.11 Kalibrasi Accelerometer
2. Klik Calibrate Accel untuk memulai kalibrasi. Mission Planner akan meminta Anda untuk menempatkan armada setiap posisi kalibrasi. Tekan tombol apa saja untuk menunjukkan bahwa autopilot berada pada posisi dan kemudian lanjutkan ke orientasi berikutnya. Posisi kalibrasi adalah: tingkat, di sisi kanan, sisi kiri, bagian depan ke bawah, bagian depan ke atas dan punggungnya.

Gambar 3.12 Posisi Kalibrasi Accelerometer
3. Bila Anda telah menyelesaikan proses kalibrasi, Mission Planner akan menampilkan “Calibration Successful!” Seperti yang ditunjukkan di bawah ini.
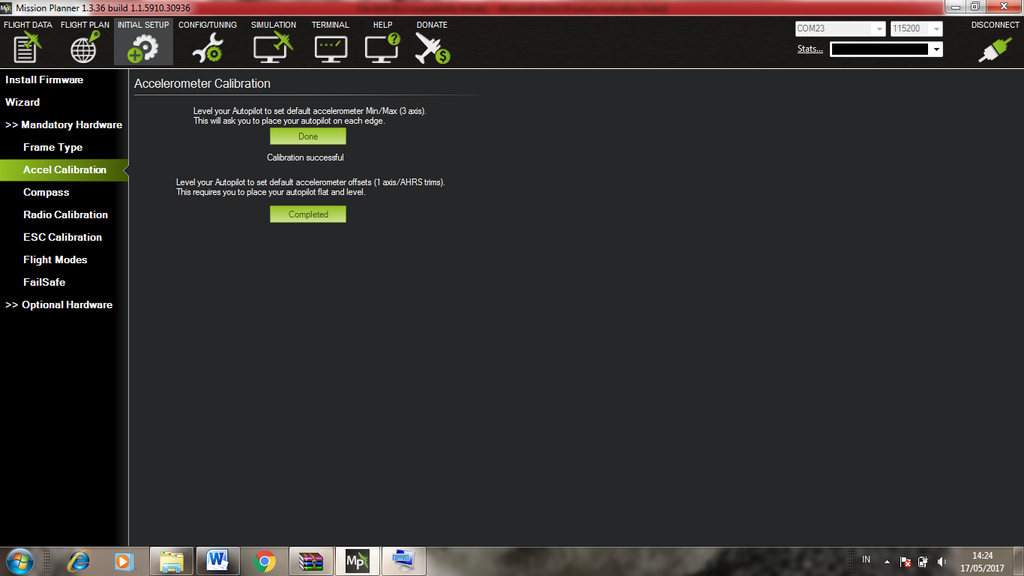
Gambar 3.13. Kalibrasi Accelerometer Sukses
3. Kalibrasi Kompas
Tujuan kalibrasi kompas adalah untuk mendapatkan posisi yang benar sehingga drone bisa menyamakan pergerakan dari rc dan menjalankan perintah dengan benar seperti perintah RTH dll. Berikut tahap-tahapanya:
1. Klik InitialSetup → MandatoryHardware → Compass.
2. Pilih konfigurasi Flight Controller untuk secara otomatis memasukkan informasi konfigurasi yang paling penting.
3. Pilih APM untuk dengan kompas ekternal.
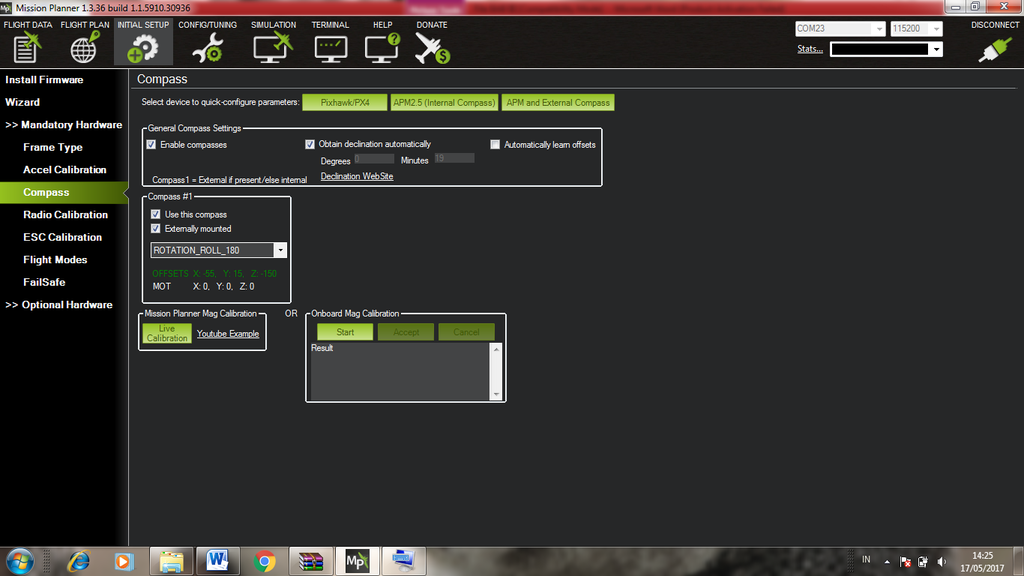
Gambar 3.14. Kalibrasi Kompas
5. Klik tombol Live Calibration dan akan tampil seperti pada gambar dibawah ini
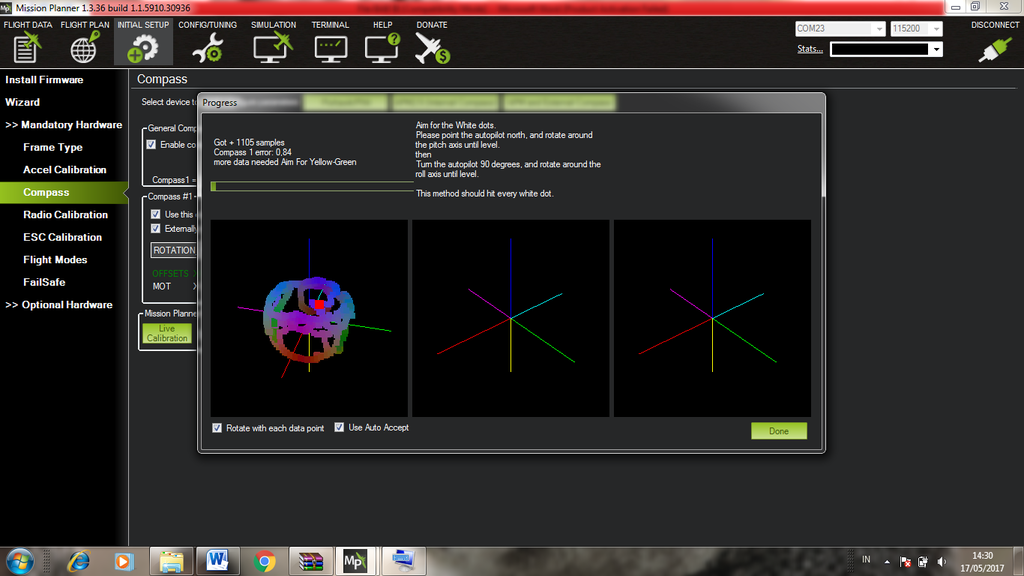
Gambar 3.15. Proses Kalibrasi Kompas
6. Langkah selajutnya adalah memutar kendaraan sehingga jejak berwarna menyentuh masing-masing titik putih. Salah satu cara untuk melakukan ini adalah dengan menahan kendaraan di udara dan memutarnya perlahan sehingga masing-masing sisi (depan, belakang, kiri, kanan, atas dan bawah) mengarah ke bumi selama beberapa detik secara bergantian.

Gambar 3.16. Posisi Kalibrasi Kompas
7. Kalibrasi secara otomatis akan selesai bila memiliki data untuk semua posisi. Pada titik ini, Tampilan akan muncul memberitahu bahwa ini menghemat offset yang baru dihitung. Ini ditampilkan di layar utama di bawah setiap kompas yang terkait.
4. Kalibrasi Remot Control
Pemancar RC digunakan untuk mengendalikan pergerakan dan orientasi quadcopter. Kopling dan quadcopter seperti control throttle, pitch, roll dan yaw. Masing-masing sinyal kontrol diletakan ke tongkat pemancar / switch (s) dan pada gilirannya menjadi saluran otomatis dari receiver yang terhubung. Ada dua konfigurasi pemancar utama:
Mode 1: kontrol tongkat kiri dipegang dan ditahan, tongkat kanan akan mengendalikan throttle dan roll.
Mode 2: kontrol tongkat kiri throttle dan yaw; Tongkat kanan akan mengontrol pitch and roll.
Sambungkan autopilot via USB dan hidupkan pemancar RC. Pastikan pemancar terhubung ke receiver (receiver menampilkan lampu hijau) dan diatur untuk menggunakan armada quadcopter yang benar. Langkah-langkah kalibrasi adalah sebagai berikut :
1. Buka Mission Planner lalu pilih Initial Setup → Mandatory Hardware → Radio Calibration screen.
2. Klik pada tombol Green Calibrate Radio di kanan bawah tampilan. Mission Planner akan menampilkan prompt untuk memeriksa peralatan kontrol radio menyala, baterai tidak terhubung, dan baling-baling tidak terpasang. Pilih OK untuk memulai kalibrasi.
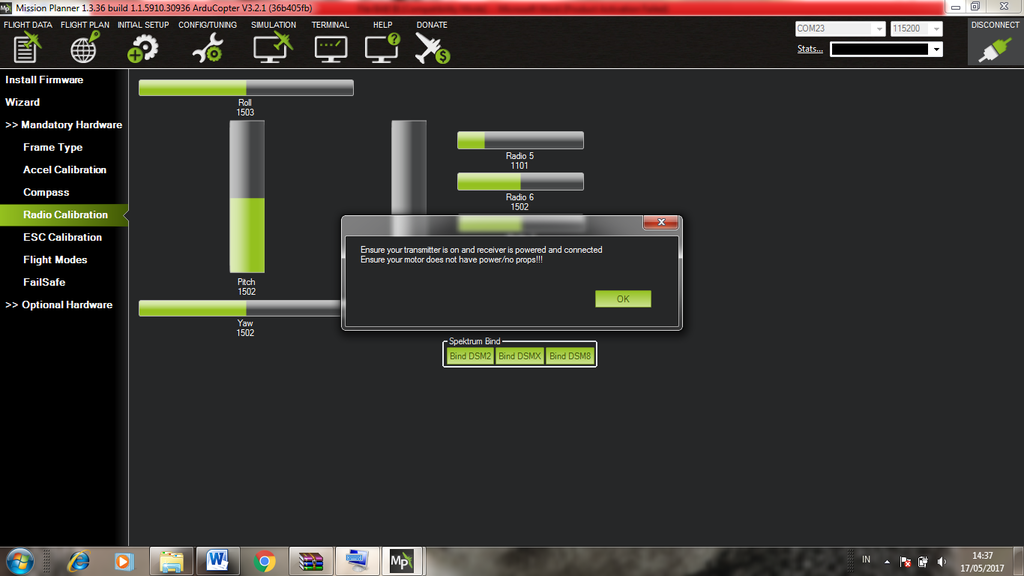
Gambar 3.17. Tampilan Awal Kalibrasi Remot
3. Pindahkan tongkat kontrol dan matikan saklar pada pemancar ke batas perjalanan dan amati hasilnya pada bar kalibrasi radio. Garis merah akan muncul di bar kalibrasi untuk menunjukkan nilai maksimum dan minimum.
Gambar 3.18 Tampilan Nilai Maksimum dan Minimum
4. Klik when Done Bila semua saluran yang dibutuhkan ditetapkan pada posisi minimum dan maksimum. Mission Planner akan menunjukkan ringkasan dari data kalibrasi. Nilai normal sekitar 1100 untuk minimum dan 1900 untuk
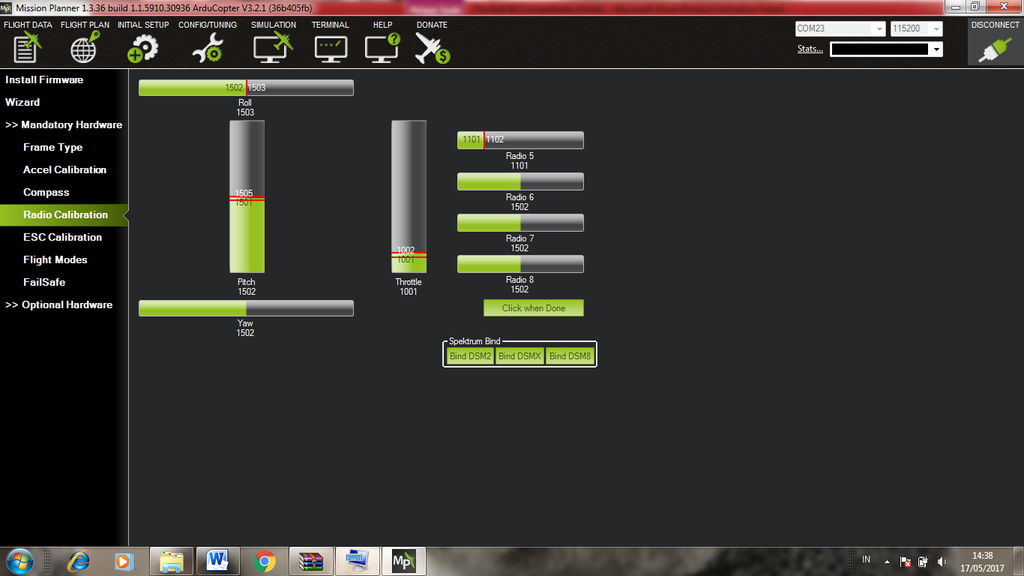
Gambar 3.19 Tampilan Akhir Kalibrasi Remot
5. Matikan pemancar dan lepaskan baterai jika terhubung.
5. Kalibrasi Electronic Speed Controller
Kalibrasi Electronic Speed Controller tidak semua merk ESC perlu dikalibrasi dan caranya akan bervariasi tergantung merk yang digunakan. Berikut langkah kalibrasi secara manual yang penulis lakukan
1. Hidupkan remot kontrol dan Naikan throttle maksimal.

Gambar 3.20. Throttle Maksimal
2. Hubungkan baterai Lipo. LED merah, biru dan kuning autopilot akan menyala secara bergantian. Ini berarti siap untuk masuk ke mode kalibrasi ESC.
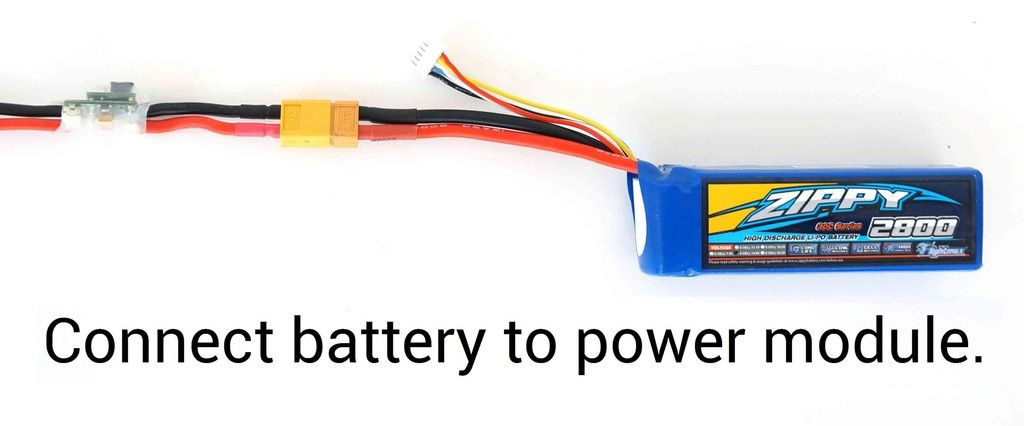
Gambar 3.21. Baterai Terhubung
3. Dengan stik throttle remot masih tinggi, lepaskan dan sambungkan kembali baterai.
4. Tekan dan tahan tombol pengaman sampai berwarna merah padam.
5. Autopilot dalam mode kalibrasi ESC. (perhatian lampu LED yang berkedip).
6. Tunggu ESC mengeluarkan nada beep, jumlah beep yang teratur yang menunjukkan jumlah sel baterai Anda (yaitu 3 untuk 3S, 4 untuk 4S) dan dua bunyi bip lagi untuk menunjukkan bahwa throttle maksimum telah ditangkap.
7. Turunkan throttle transmitter ke posisi minimum.

Gambar 3.22. Throttle Minimum
8. ESC kemudian mengeluarkan nada panjang yang menunjukkan bahwa throttle minimum telah ditangkap dan kalibrasi selesai.
9. Jika nada panjang yang menunjukkan kalibrasi berhasil terdengar, ESC "hidup" sekarang dan jika menaikkan throttle sedikit, motor harus berputar. Ujilah motor berputar dengan menaikkan throttle sedikit dan kemudian turunkan lagi.
9. Jika nada panjang yang menunjukkan kalibrasi berhasil terdengar, ESC "hidup" sekarang dan jika menaikkan throttle sedikit, motor harus berputar. Ujilah motor berputar dengan menaikkan throttle sedikit dan kemudian turunkan lagi.
10. Turunkan throttle ke minimum dan lepaskan baterai untuk keluar dari mode kalibrasi ESC.
B. Perancangan Software Arduino
Pada perancangan software ini menggunakan program Arduino untuk menuliskan listing program. Arduino Pro Mini sebagai media yang digunakan untuk mengupload program kedalam mikrokontroller, sehingga mikrokontroller dapat bekerja sesuai dengan yang diperintahkan. Adapun langkah-langkah untuk memulai seperti gambar 3.23 sebagai berikut :
Gambar 3.23. Memulai IDE Arduino
Kemudian akan muncul layer untuk menulis listing program seperti pada gambar 3.24. sebagai berikut:
Gambar 3.24. Tampilan layar program Arduino 1.6.8
Setelah listing program ditulis semua, langkah selanjutnya proses kompilasi untuk mengecek apakah listing program yang ditulis terjadi kesalahan atau tidak, pilih menu verify. Seperti pada gambar 3.25.
Gambar 3.25. Mengecek Listing Program
Pada pemrograman ini perlu diperhatikan untuk koneksi portnya, karena pada pengalamatan port inilah mikrokontroler dapat berkomunikasi dengan PC atau laptop melalui komunikasi serial. Seperti pada gambar 3.26.
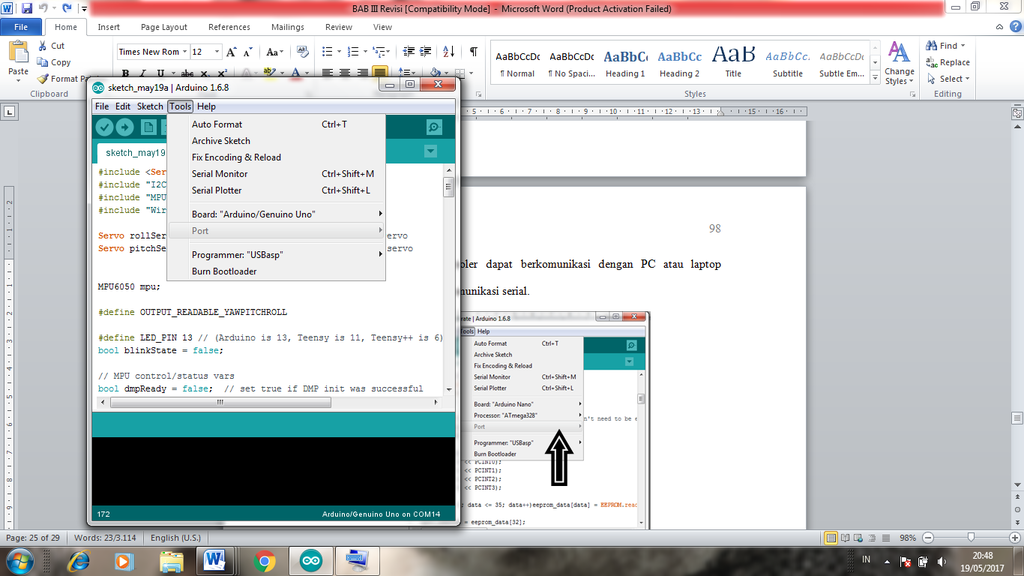
Gambar 3.26. Menentukan Koneksi Port
Setelah selesai menuliskan listing program dan menentukan port selanjutnya klik Save as terlebih dahulu, kemudian program perlu disesuaikan dengan board yang digunakan, pilih menu pilih Tools - Board yang sesuai dengan board Arduino yang dipakai, seperti pada gambar 3.27 dibawah ini :
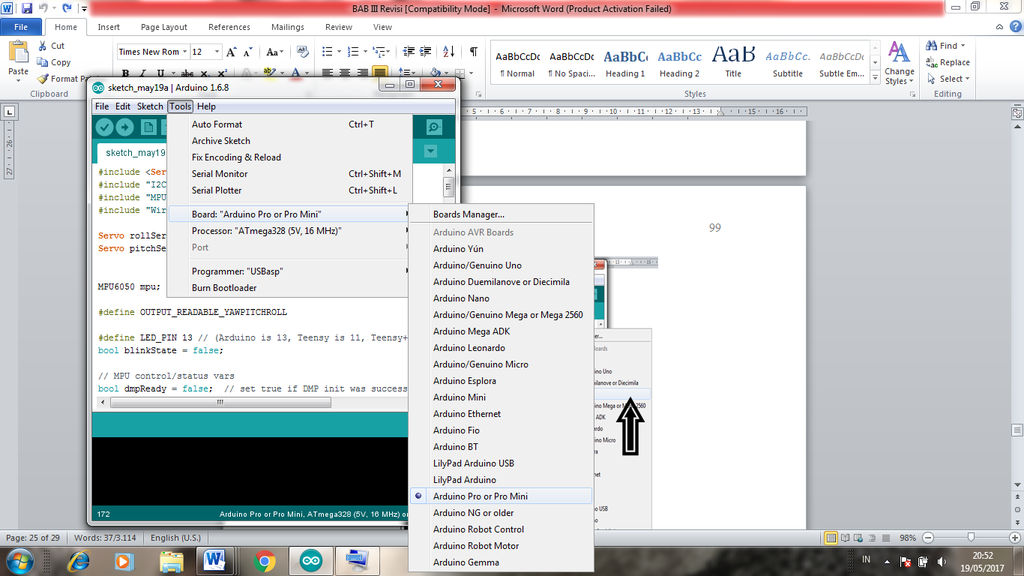
Gambar 3.27. Menu Tools – Board
Tahapan terakhir memasukkan program kedalam mikrokontroler, klik menu Upload, bisa dilihat pada gambar 3.28.
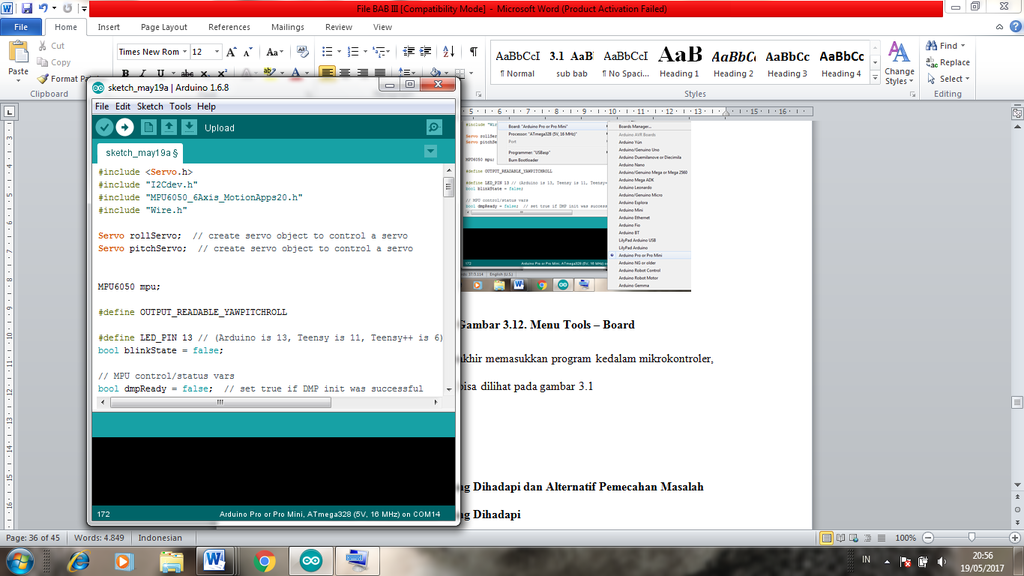
Gambar 3.28 Upload Program
Permasalahan Yang Dihadapi dan Alternatif Pemecahan Masalah
Permasalahan Yang Dihadapi
Berdasarkan hasil wawancara yang dilakukan pada Stakeholder, untuk dapat memastikan lingkungan aman Staff keamanan harus berjalan kaki mengontrol sekitar kampus dan membutuhkan waktu cukup lama.
Setelah mengamati dan meneliti dari beberapa permasalahan yang terjadi pada sistem yang berjalan, terdapat permasalahan yang dihadapi diantaranya :
a. Security harus mengelilingi sekitar kampus dengan cara berjalan kaki
b. Memakan waktu cukup lama dan menguras tenaga.
c. Membutuhkan banyak Staff Keamanan karena menjaga pos dan mengontrol lingkungan tidak dapat dilakukan dengan seorang diri.
Alternatif Pemecahan Masalah
Setelah mengamati dan meneliti dari beberapa permasalahan yang terjadi pada sistem yang berjalan, terdapat beberapa alternatif pemecahan dari permasalahan yang dihadapi, diantaranya :
a. Membuat alat yang membantu Staff Keamanan dalam mengontrol lingkungan.
b. Membuat alat yang dapat dikendalikan dari jarak jauh.
c. Membuat sistem yang memudahkan Staff Keamanan dalam menjaga lingkungan.
User Requirement
Elisitasi Tahap I
Elisitasi tahap I disusun berdasarkan hasil wawancara dengan stakeholder mengenai seluruh rancangan sistem. Berikut adalah hasil Elisitasi Tahap I:
ELISITASI TAHAP I
Tabel 3.1 Elisitasi.Tahap I
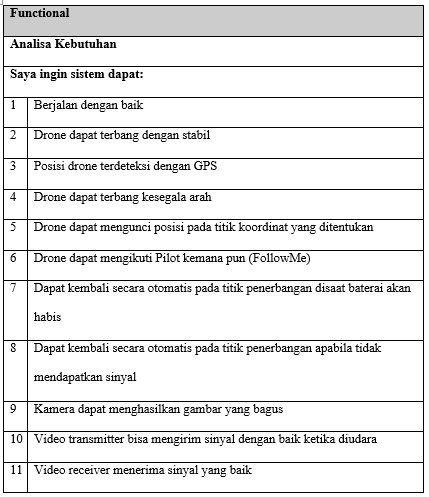
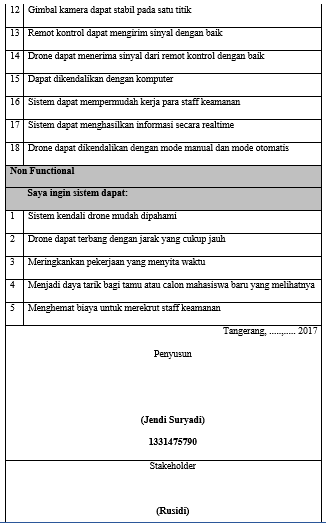
Elisitasi Tahap II
Elisitasi Tahap II dibentuk berdasarkan Elisitasi Tahap I yang kemudian diklasifikasikan dengan menggunakan metode MDI.
ELISITASI TAHAP II
Tabel 3.2 Elisitasi.Tahap II
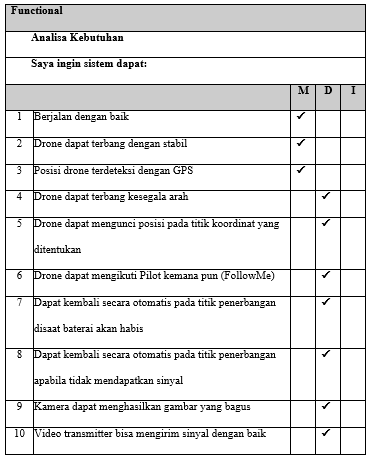
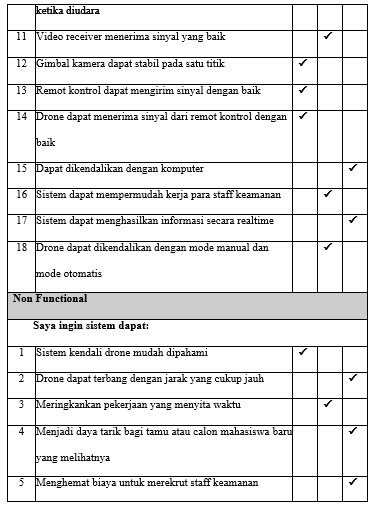
Keterangan :
M = Mandatory
D = Desirable
I = Inessential
Elisitasi Tahap III
Berdasarkan Elisitasi Tahap II di atas, dibentuklah Elisitasi Tahap III yang diklasifikasikan kembali dengan menggunakan metode TOE dengan opsi HML. Berikut adalah gambar elisitasi tersebut:
ELISITASI TAHAP III
Tabel 3.3 Elisitasi.Tahap III
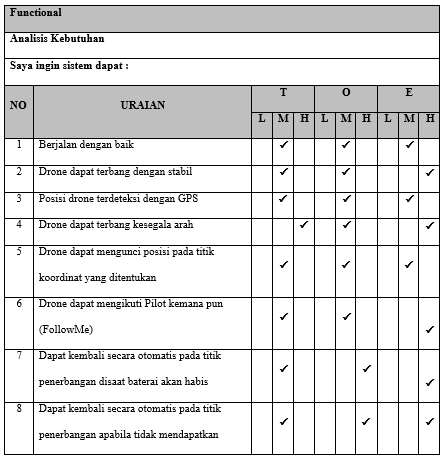
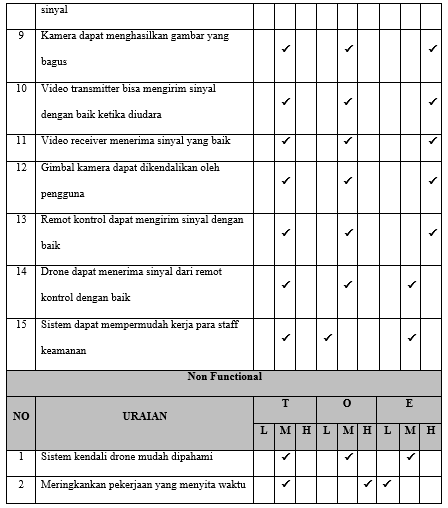
Keterangan :
T : Technical L : Low
O : Operational M : Middle
E : Economic H : High
Final Elisitasi
Final elisitasi merupakan bentuk akhir dari tahap-tahap elisitasi yang dapat dijadikan acuan dan dasar pengembangan sistem Controlling menggunakan drone. Berdasarkan elisitasi tahap III diatas, dihasilkanlah 11 point final elisitasi yang diharapkan dapat mempermudah dalam membuat suatu sistem pengontrolannya. Berikut lampiran Final Elisitasi:
Final Elisitasi
Tabel 3.4 Final Elisitasi
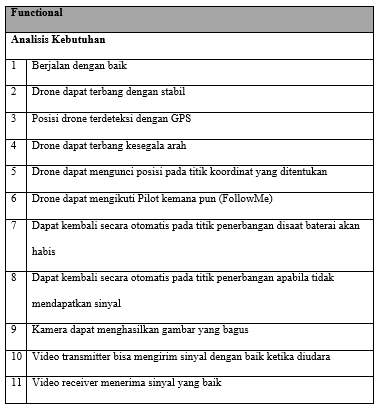
BAB IV
Uji Coba
Setelah melakukan perancangan dan pemasangan komponen hardware dan software, selanjutnya adalah melakukan serangkaian uji coba pada masing-masing blok rangkaian yang bertujuan untuk mendapatkan kesesuaian spesifikasi dan hasil yang diinginkan. Untuk lebih jelas mengenai pembahasan hasil uji coba yang akan dilakukan, dapat di lihat pada sub bab berikut.
Metode Black Box
Berikut ini adalah tabel pengujian Black Box berdasarkan Drone Quadcopter berbasis arducopter untuk pengujian pada alat, yaitu sebagai berikut:
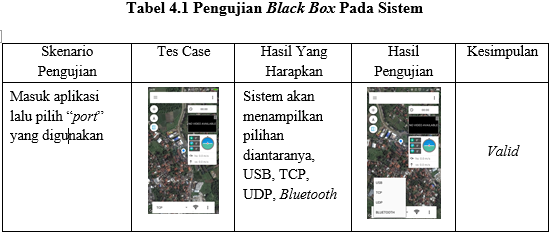
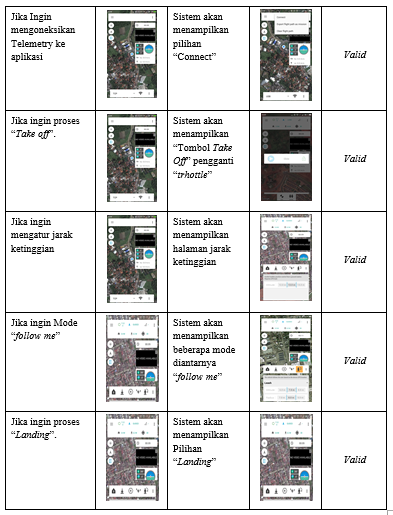
Uji Coba Mode Terbang
Dalam uji coba Mode Terbang dilakukan pada pagi hari dikarenakan angin tidak bertiup terlalu kencang saat pagi hari. Saat pengetesan baterai harus terisi penuh. Sebelum melakukan tes penerbangan semua propeller dicek lagi untuk memastikan sudah terpasang dengan kencang.
A. Pengujian Terbang Secara Manual
Terbang manual dilakukan dengan menggunakan remote kontrol untuk mengendalikan pergerakan drone melalui stik throttle, yaw, pitch dan roll.
Langkah pertama adalah tempatkan posisi drone pada lokasi yang datar dan bebas dari rintangan agar nanti pada saat proses arming drone tidak terjatuh. Kemudian remote kontrol dinyalakan dengan posisi stik throttle kearah bawah. Selanjutnya adalah proses arming stik kiri pada remote kontrol digerakan kearah bawah dan geser kekanan selama dua detik, seperti pada gambar 4.1.

Gambar 4.1. Proses Arming
Propeller akan berputar dengan kecepatan rendah setelah proses arming. Setelah dipastikan drone dalam posisi aman stik throttle digerakan sedikit kearah depan untuk takeoff. Propeller akan berputar semakin kencang seiring gerakan stik throttle. Dalam mode manual ini kita harus hati-hati dikarenakan remote kontrol sangat sensitif. Stik digerakan dengan perlahan.
Untuk memutar drone pada arah kiri dan kanan kita harus menggerakan stik yaw (stik kiri) secara perlahan dengan seketika drone akan berputar searah jarum jam atau melawan arah jarum jam pada porosnya secara perlahan. Semakin jauh gerakan stik maka drone semakin cepat berputar pada porosnya. Yaw berfungsi untuk memutar arah drone, berputar kearah kiri atau kearah kanan.
Pada saat drone terbang pada ketinggian tertentu stik pitch (stik kanan) digerakan sedikit kearah depan, dengan seketika drone bergerak maju kedepan secara perlahan. Selanjutnya stik pitch digerakan sedikit kearah belakang maka drone akan mundur kebelakang secara perlahan. Semakin jauh stik digerakan maka semakin cepat pergerakan drone. Pitch berfungsi untuk mengendalikan sudut depan dan belakang drone. Pitch kedepan akan menyebabkan bagian depan drone miring kerah bawah dan sebaliknya bila pitch kearah belakang maka bagian belakang drone akan miring kebawah.
Pada saat drone terbang pada ketinggian tertentu, stik Roll (stik kanan) digerakan kearah kanan sedikit, dengan seketika drone bergerak ke arah kanan. Ketika roll digerakan ke arah kiri maka drone akan bergerak kekiri. Roll berfungsi untuk menggeser posisi drone kearah samping.
Untuk landing stik throttle digerakan ke arah bawah secara perlahan dan lihat posisi drone dan kondisi sekitar sampai drone turun dan mendarat dibawah dengan sempurna. Setelah landing selanjutnya adalah proses disarming dengan cara menahan stik kiri pada remot kearah bawah dan geser kekiri selama dua detik seperti pada gambar 4.2. Setelah proses disarming selesai semua propeller berhenti berputar. Selanjutnya konektor pada power module dengan baterai dilepas lalu remote kontrol dimatikan.

Gambar 4.2. Proses Disarming
B. Pengujian Terbang secara Semi-Outo
Drone takeoff secara manual dengan menggunakan stik thorttle pada remot kontrol. Stik thorttle digerakan perlahan ke arah depan sampai mencapai ketinggian tertentu yaitu ketika posisi stik berada di sekitar tengah kemudian stik thorttle dibiarkan pada posisi tersebut. Swd posisi di up dan Swc di Midle pada bagian depan kanan sudah diset untuk mode Loiter. Saat stik thorttle dilepaskan drone berusaha untuk tetap pada posisi semula, modul APM berhasil mengendalikan posisi drone berada pada posisi yang tetap.
Pada mode loiter drone diperintahkan untuk mempertahankan posisi pesawat berdasarkan feedback pembacaan nilai longitude, latitude dan altitude dari modul GPS. Dalam keadaan drone terbang pada mode loiter, drone masih bisa digerakan dengan menggunakan remote kontrol , baik thorttle, yaw, pitch ataupun roll.
C. Pengujian Fitur Followme
Pada fitur ini drone akan mengikuti ke mana saja pengguna melangkah. Drone diterbangkan dengan dengan menggunakan kendali smartphone. Pengujian dilakukan untuk menguji fitur follow me, yaitu dengan menggunakan aplikasi Tower pada smartphone dan module telemetry USB. Smartphone yang dipakai untuk pengujian harus mendukung fitur OTG pada port USB nya, pada saat kabel OTG dan module telemetry USB dihubungkan dengan smartphone, modul telemetry terdeteksi secara otomatis. Drone dapat takeoff langsung menggunakan smartphone dan selanjutnya menjalankan aplikasi android pada smartphone dan mengaktifkan mode follow me. Pada aplikasi android kita dapat mengatur radius drone dan ketinggian sesuai dengan kebutuhan kita.
D. Pengujian Mendarat Otomatis
Pengujian terakhir pada mode penerbangan adalah fungsi kembali ke tempat lepas landas secara otomatis. Swd posisi di up dan Swc di law pada bagian depan kanan sudah diset untuk mode RTH. Pada saat sakelar untuk mode Return to Launch (RTL) pada remote kontrol diaktifkan. Hasilnya dengan seketika drone bergerak kembali kelokasi tempat drone lepas landas dan mendarat secara otomatis.
Setelah melakukan serangkaian uji coba dengan menggunakan mode manual dan otomatis selanjutnya yang akan dilakukan uji coba adalah jarak tempuh. Uji coba ini dilakukan berdasarkan jarak dan kestabilan drone. Berikut hasil uji cobanya.
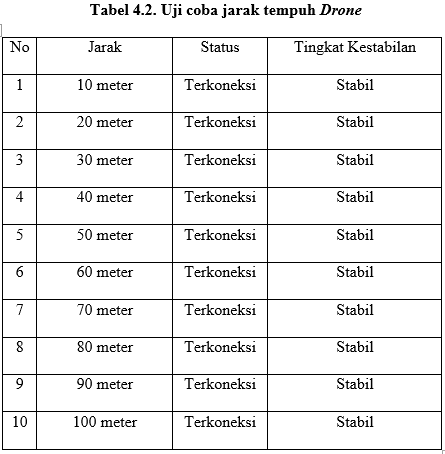
Pengujian Video Transmitter dan Receiver
Setelah uji coba mode terbang selanjutnya ialah uji coba Video Transmitter yang berada di drone maupun Video Receiver yang berada dilaptop pengguna. Berikut hasil uji cobanya.
DAFTAR PUSTAKA
- ↑ 1,0 1,1 Rusdiana, Irfan. 2014. “Sistem Informasi Manajemen”. Bandung: Pustaka Setia.
- ↑ 2,0 2,1 2,2 Taufiq, Rohmat. 2013 “Sistem Informasi Manajemen”. Yogyakarta : Graha Ilmu Offset
- ↑ Hartono, Bambang. 2013 “Sistem Informasi Manajemen Berbasis Komputer. ”. Jakarta : PT Asdi Mahasatya Offset
- ↑ 4,0 4,1 Melina, Rita. 2016“Dasar Sistem Komputer.”. Diambil dari https://blog.uad.ac.id
- ↑ Akhmad Insya. 2013.
- ↑ 6,0 6,1 Akhmad Insya. 2013. Sistem Kontrol Loop Terbuka". jurnal mekanikal Vol 3 No 2 Juli 2012
- ↑ 7,0 7,1 7,2 Darmawan, Deni. 2013Sistem Informasi Manajemen.". Bandung : PT Remaja Rosdakarya Offset
- ↑ Uzzaman, Anis. 2015Devinisi Prototype. ". Yogyakarta
- ↑ Seema, Sona Malhotra. 2012. Analysis and tabular comparison of popular SDLC models. International Journal Of Advances In Computing And Information Technology (IPAJOURNALS 2012) ".
- ↑ 10,0 10,1 10,2 Tjiang, Herry. 2016“Istilah Pengertian dan Jenis Drone.”. Diambil dari http://www.herrytjiang.com.
- ↑ 11,0 11,1 Ardi. 2015.“Fungsi dan Penggunaan Drone ”. diambil dari http://airdronesia. blogspot.co.id
- ↑ 12,0 12,1 12,2 Wiratama, Caesar. 2016 “Dasar-dasar Flight Controller. ”.Diambil dari http://aeroengineering.co.id.
- ↑ Hani dkk dalam jurnal CCIT Vol.9 No.1 2015
- ↑ Pardi, Wakijan. 2015."Pengertian Propeller". Diambil Dari http://wakijan99.blog spot.co.id
- ↑ 15,0 15,1 Menurut Musbikhin. 2014 ."Pengertian Batre". Diambil Dari http://www.musbikhin.com
- ↑ Dinar, Adhinda. 2016. “Global Positioning System. ”. Diambil dari http://www. dictio.id
- ↑ Andry Candra. 2012
- ↑ Dharsito, Wahyu. 2015. "Pengenalan Kamera". Jakarta: Elex Media Komputindo
- ↑ 19,0 19,1 Prasetya, Deni. 2014 "Komunikasi Data. ".Diambil dari http://m4z.blogspot.co.id
- ↑ Warsito, dkk. 2015.
- ↑ Hermawan dalam Tiara. 2013.