SI1331475790: Perbedaan revisi
| [revisi terperiksa] | [revisi terperiksa] |
(→B. Sejarah Drone Quadcopter) |
(→A. Definisi Flight Control Board) |
||
| Baris 755: | Baris 755: | ||
=== Konsep Dasar Flight Control Board === | === Konsep Dasar Flight Control Board === | ||
==== A. Definisi Flight Control Board ==== | ==== A. Definisi Flight Control Board ==== | ||
| − | <p style="text-indent: 3em"> | + | <p style="text-indent: 3em">Menurut Caesar Wiratama (2016:1)<ref name="[12]">Wiratama, Caesar. 2016 ''“Dasar-dasar Flight Controller. ”''.Diambil dari http://aeroengineering.co.id.</ref>, ”Flight controller adalah otak dari drone, Flight controller ini membaca sinyal-sinyal dari sensor dan melakukan kalkulasi untuk memerintahkan drone bergerak sesuai keinginan”. Adapun berikut ini adalah penjelasan dari fitur-fitur yang ada pada Arducopter versi 2.6 :.</p> |
=<div style="text-align: center;line-height: 1;">'''DAFTAR PUSTAKA'''</div>= | =<div style="text-align: center;line-height: 1;">'''DAFTAR PUSTAKA'''</div>= | ||
Revisi per 10 Agustus 2017 06.44
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
SKRIPSI

OLEH:
1331475790 Jendi Suryadi
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
(2016/2017)
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Disusun Oleh:
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
| Jenjang Studi | : Strata Satu |
| Jurusan | : Sistem Komputer |
| Konsentrasi | : Computer System |
Disahkan Oleh :
Tangerang, 21 Juli 2017
| Ketua | Kepala Jurusan | ||||
| STMIK RAHARJA | Jurusan Sistem Komputer | ||||
| (Ir. Untung_Rahardja, M.T.I) | (Ferry Sudarto, S.Kom,, M.Pd) | ||||
| NIP : 00594 | NIP : 079010 |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Dibuat Oleh :
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Disetujui Oleh :
Tangerang, 21 Juli 2017
| Pembimbing I | Pembimbing II | ||
| (Fredy Susanto, M.Kom) | (Ignatius Agus Supriyono, , S.kom.,MM) | ||
| NID : 04051 | NID : 09004 |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTYPE SISTEM CONTROLLING KEAMANAN
DENGAN MENGGUNAKAN DRONE QUADCOPTER
BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA
Dibuat Oleh :
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Tahun Akademik 2016/2017
Disetujui Penguji :
Tangerang, 29 September 2016
| Ketua Penguji | Penguji I | Penguji II | ||
| (---------,) | (----------, ) | (------------,) | ||
| NID :------------ | NID :--------- | NID :--------- |
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
Saya yang bertandatangan di bawah ini,
| NIM | : 1331475790 |
| Nama | : Jendi Suryadi |
| Jenjang Studi | : Strata Satu |
| Jurusan | : Sistem Komputer |
| Konsentrasi | : Computer System |
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
| Tangerang, 21 Juli 2017 | |
| Jendi Suryadi | |
| NIM. 1331475790 |
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Perkembangan teknologi dari tahun ketahun berkembang dengan pesat dan telah memberikan banyak keuntungan dalam segala kebutuhan atau keperluan manusia, baik dalam bidang informasi, komunikasi, transportasi, dan bidang-bidang lainnya. Salah satu teknologi yang berkembang pesat saat ini adalah pesawat tanpa awak (Drone) yang dikendalikan dari kejauhan menggunakan remote kontrol. Drone atau pesawat tanpa awak saat ini digunakan untuk kebutuhan foto atau video, untuk memantau suatu wilayah, berbagai keperluan sipil, profesional dan militer. Drone jenis quadcopter merupakan salah satu jenis drone yang banyak digunakan karena memiliki beberapa kelebihan yaitu dapat terbang dengan baik karena memiliki 4 motor brushless yang menjadi penggerak utama dan desain rangka yang sederhana. Dalam penulisan ini, penulis bermaksud untuk merancang sebuah drone dengan jenis quadcopter yang dapat terbang dengan stabil dan jarak tempuh yang jauh sehingga dapat membantu security dalam menjalankan tugasnya. Kontroler yang dipakai pada rancangan ini adalah arducopter. Maka dari itu penulis mengambil judul “Prototype Sistem Controlling Keamanan Dengan Menggunakan Drone Quadcopter Berbasis Arducopter Pada Perguruan Tinggi Raharja. Semoga saja dengan alat ini bisa membantu Perguruan Tinggi Raharja yang saya observasi ini.
Kata Kunci: Drone Quadcopter, Arducopter, Perguruan Tinggi Raharja
ABSTRACT
Technological developments from year to year developed rapidly and have provided many advantages in all human needs or needs, communications, transportation, and other fields. One of the fastest growing technologies today is the remote controlled drone (Drone). Drones or drones are currently used for photo or video needs, to monitor a territory, a variety of civil, professional and military needs. Drone type quadcopter is one type of drone that is widely used because it has some advantages that can fly well because it has 4 brushless motor that became the main mover and simple frame design. In this writing, the author intends to design a drone with a quadcopter type that can fly with a stable and a long distance so that it can help the security in carrying out its duties. The controller used in this design is the arducopter. Therefore the author took the title "Prototype Controlling System Security Using Drone Quadcopter Based Arducopter At Higher Education Raharja. Hopefully with this tool can help Higher Education Raharja that I observation this.
Keywords: Drone Quadcopter, Arducopter
KATA PENGANTAR
Alhamdulillahirabbil’aalamin.
Puji syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan beribu-ribu nikmat kepada kita semua, sejuta langkah serta melimpahkan segala rahmat dan karunia-Nya, sehingga laporan Skripsi Penulis dapat berjalan dengan baik dan selesai sesuai harapan dengan judul “Prototype Sistem Controlling Keamanan Dengan Menggunakan Drone Quadcopter Berbasis Arducopter Pada Perguruan Tinggi Raharja”
Tujuan dari pembuatan Skripsi ini adalah sebagai salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) untuk jenjang S1 di Perguruan Tinggi Raharja, Cikokol Tangerang. Sebagai bahan penulisan, Penulis memperoleh informasi berdasarkan hasil observasi dan studi pustaka dari berbagai sumber yang mendukung penulisan laporan ini.
Saya pun menyadari bahwa tanpa bimbingan dan dorongan dari semua pihak penyusunan laporan Skripsi ini tidak akan berjalan sesuai dengan yang diharapkan. Oleh karena itu pada kesempatan ini, izinkanlah penulis menyampaikan pujian dan terimakasih kepada :
- Bapak Ir. Untung Rahardja, M.T.I selaku selaku Ketua STMIK RAHARJA.
- Bapak Dr. Po. Abas Sunarya, M.Si selaku Direktur STMIK Raharja.
- Bapak Sugeng Santoso, M.Kom selaku Pembantu Ketua I Bidang AkademikSTMIK Raharja.
- Bapak Ferry Sudarto, S.Kom,.M.Pd. selaku Kepala Jurusan Sistem Komputer STMIK Raharja.
- Bapak Fredy Susanto M.Kom.,CCNA.,MTCNA selaku Dosen pembimbing pertama yang telah membantu serta memberikan bimbingan dan arahan kepada penulis..
- Bapak Ignatius Agus Supriyono,S.Kom.,MM. Selaku Dosen pembimbing kedua, terimakasih atas pengarahan serta saran yang telah diberikan kepada penulis, sehingga dapat menjalani skripsi ini dengan penuh ilmu dan semangat..
- Bapak Rusidi sebagai Komandan Regu Security STMIK Raharja sekaligus stakeholder yang telah banyak berkontribusi dan memberikan informasi, sehingga penulis dapat menyelesaikan Skripsi dengan tepat waktu.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Kepada Orang Tua yang selama ini telah setia memberikan dorongan semangat, perhatian, dan doa.
- Semua rekan-rekan mahasiswa/i yang telah membantu penulis dalam menyelesaikan laporan Skripsi ini.
Penulis menyadari bahwa dalam penulisan Laporan Skripsi ini masih jauh dari kata sempurna. Oleh karena itu kritik dan saran yang membangun sangat penulis harapkan sebagai pemicu untuk dapat berkarya lebih baik lagi. Semoga Laporan Skripsi ini bermanfaat bagi pihak yang membutuhkan.
| Tangerang, 24 Juli 2017 | |
| Jendi Suryadi | |
| NIM. 1331475790 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 3 DAFTAR PUSTAKA
BAB I
Latar Belakang
Perkembangan teknologi dari tahun ketahun berkembang dengan pesat dan telah memberikan banyak keuntungan dalam segala kebutuhan atau keperluan manusia, baik dalam bidang informasi, komunikasi, transportasi, dan bidang-bidang lainnya. Salah satu teknologi yang berkembang pesat saat ini adalah pesawat tanpa awak (Drone) yang dikendalikan dari kejauhan menggunakan remote kontrol. Drone awalnya digunakan di dunia militer. Drone juga diimplementasikan dalam operasi pencarian dan mengontrol keamanan sebuah wilayah atau aplikasi sipil lainnya, seperti kepolisian, security, pemadam kebakaran dan sekarang banyak digunakan didunia pertanian untuk menyiram tanaman.
Teknologi pesawat tanpa awak (Drone) mengalami perjalanan panjang. Konsep penerbangan udara tak berawak ini pertama kali pada 22 Agustus 1849, ketika Austria menyerang kota Venesia Italia dengan balon tak berawak yang membawa peledak. Beberapa balon diluncurkan dari kapal Austria Vulcano. Beberapa balon mencapai sasarannya dan sebagian besar terbawa angin dan berubah arah.
Di Perguruan Tinggi Raharja sistem keamanan kampus hanya mengandalkan security untuk berkeliling mengontrol keamanan kampus dan kamera pengintai atau biasa disebut kamera CCTV untuk merekam. Karena lemahnya sistem kemanan kampus yang diterapkan timbul ide penulis untuk membuat judul “PROTOTYPE SISTEM CONTROLLING KEAMANAN DENGAN MENGGUNAKAN DRONE QUADCOPTER BERBASIS ARDUCOPTER PADA PERGURUAN TINGGI RAHARJA”.
Dengan prototype atau sistem yang akan penulis buat, Drone akan memudahkan security dalam mengontrol lingkungan sekitar area kampus. Security hanya mengendalikan Drone dari Pos jaga dengan menggunakan remote control dan Drone akan terbang keliling mengontrol lingkungan kampus.
Rumusan Masalah
Beberapa hal yang menjadi perumusan dalam penyusunan laporan ini antara lain:
- Bagaimana cara membuat drone quadcopter berbasis arducopter?
- Bagaimana cara kerja drone quadcopter berbasis arducopter dengan menggunakan remote kontrol ?
- Bagaimana cara mengkonfigurasi kamera untuk mengirim video ke komputer yang ada di departement security?
Ruang Lingkup
Adapun ruang lingkup yang dibatasi pada penulisan penelitian ini yaitu:
- Pembuatan Prototype untuk sistem keamanan dengan menggunakan Drone Quadcopter berbasis Arducopter.
- Drone hanya digunakan untuk mengontrol lingkungan sekitar kampus.
- Drone hanya dapat dikendalikan menggunakan remote control dan Smartphone.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Tujuan penelitian yang ingin dicapai dari penulisan laporan ini adalah:
1. Tujuan individual
a. Untuk memenuhi syarat kelulusan jenjang sastra (S1).
b. Mengimplementasikan dan menerapkan ilmu yang didapat selama masa perkuliahan.
c. Sebagai bentuk kontribusi konsep CCIT & COS pada jurusan Sistem Komputer di STMIK Raharja
2. Tujuan Fungsional
a. Hasil dari penelitian dapat dimanfaatkan dan digunakan oleh Perguruan Tinggi Raharja.
b. Sebagai bahan acuan atau referensi bagi Perguruan Tinggi Raharja dan mahasiswa dimasa yang akan datang.
3. Tujuan Operasional
a.Membantu menyelesaikan masalah sistem keamanan kampus yang diterapkan di Perguruan Tinggi Raharja
b.Mencoba mengimplementasikan sebuah teknologi Drone Quacopter dalam meningkatkan keamanan kampus di Perguruan Tinggi Raharja
Manfaat Penelitian
Adapun manfaat yang dapat dihasilkan dari penelitian ini adalah:
1. Manfaat Individual.
a. Dapat mengembangkan ilmu yang penulis dapatkan selama di perkuliahan
b. Menambah wawasan dan memberikan terobosan baru pada tempat perkuliahan.
c. Memberikan kepuasan tersendiri bagi penulis karena dapat menciptakan sesuatu yang bermanfaat dan meringkan pekerjaan Departement security.
2. Manfaat Fungsional
a. Memperoleh data secara Real Time dan berulang kali untuk mengontrol bidang penelitian sesering yang diperlukan.
b. Penelitian ini diharapkan dapat digunakan sebagai bahan penelitian selanjutnya yang berkaitan dengan Drone Quadcopter.
3. Manfaat Operasional
a. Drone diharapkan dapat meningkatkan keamanan dilingkungan kampus.
b. Drone diharapkan dapat memberikan kemudahan security dalam mengontrol lingkungan kampus.
Metode Penelitian SDLC (System Development Life Cycle)
Perencanaan
Perencanaan adalah sebuah proses dasar untuk memahami mengapa sebuah sistem itu harus dibangun, dan pada fase ini memang diperlukan analisa kelayakan dengan mencari data atau melakukan proses informasi gathering kepada para pengguna.
Analisa
1. Analisa Sistem
Pada metode ini peneliti menganalisa sistem-sistem yang sudah ada dengan beberapa poin, seperti bagaimana cara kerja sistem, apa saja komponen yang membangun sistem tersebut dan juga kekurangan dari sistem tersebut.
2. Analisa Perancangan program
Metode Analisa Perancangan Program pada penelitian Skripsi ini, peneliti menggunakan bagan alir program (Flowchart Program).
Perancangan
Dalam laporan Skripsi ini perancangan yang digunakan adalah Metode Perancangan Flowchart terlebih dahulu yang didesain sesuai cara kerja sistem. Pada perancangan alat menggunakan Diagram Blok, karena metode ini dimaksudkan untuk alat apa saja yang digunakan dan bagaimana sistem itu dirancang. Pada pembuatan alat ini, penulis menggunakan alat seperti : Arducopter sebagai flightcontrol-nya untuk mengendalikan fungsi drone.
Implementasi
Tahap ini merupakan tahap meletakan sistem supaya siap dioperasikan. Implementasi sistem juga merupakan proses mengganti atau meninggalkan sistem yang lama dengan mengganti sistem yang baru. Untuk menggantikan sistem yang lama ke sistem yang baru perlu adanya pendekatan atau strategi supaya berhasil.
Prototype
Pada Metode ini menggunakan metode prototyping yaitu proses pembuatan model sederhana software yang mengizinkan pengguna memiliki gambaran dasar tentang program serta melakukan pengujian awal.
Metode prototype yang digunakan adalah metode prototype evolutionary karena metode prototype ini secara terus menerus dikembangkan hingga prototype tersebut memenuhi fungsi dan prosedur yang dibutuhkan oleh device system.
Pengujian
Pada Metode Pengujian ini peneliti menggunakan Metode Pengujian 'Black Box Testing, 'Black Box Testing' adalah metode uji coba yang memfokuskan pada keperluan Software. Karena itu, uji coba Black Box memungkinkan pengembangan Software pada arducopter untuk membuat himpunan kondisi input yang melatih seluruh syarat-syarat fungsional suatu program diantaranya drone dapat berbelok kekiri dan kekanan serta beberapa fitur seperti FollowMee dan Lock Position. Metode Pengujian Black Box berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya fungsi-fungsi yang salah atau hilang dan kesalahan kinerja.
Sistematika Penulisan
Untuk memudahkan dan memahami lebih jelas tentang penulisan Skripsi ini, maka penulis mengelompokan materi penulisan menjadi 5 bab yang saling berkaitan antara masing-masing bab dengan yang lainnya sehingga menjadi kesatuan yang utuh. Penulisan laporan terbagi dalam beberapa bab yang berisi urutan secara garis besar dan kemudian dibagi lagi dalam sub bab yang akan membahas dan menguraikan masalah yang lebih terperinci.
| BAB I | PENDAHULUAN |
| Pada Bab ini berisi tentang Latar Belakang Masalah, Rumusan Masalah, Ruang Lingkup, Tujuan Penelitian, Manfaat Penelitian, Metode Penelitian, dan Sistematika Penulisan yang digunakan dalam penyusunan Laporan.. | |
| BAB II | LANDASAN TEORI |
| Bab ini berisikan tentang Teori Umum yang terdiri dari beberapa definisi, teori, dan istilah-istilah umum yang digunakan dalam penulisan laporan penelitian Skripsi. Teori Khusus berisi definisi, teori, dan istilah-istilah yang bersifat khusus atau mendetail yang memiliki relevansi dengan judul penelitian, dan Literature Review yang merupakan beberapa referensi penelitian sejenis dan relevan dengan judul penelitian. | |
| BAB III | ANALISA SISTEM YANG BERJALAN |
| Bab ini menjelaskan tentang gambaran umum Perguruan Tinggi Raharja, sejarah singkat Perguruan Tinggi Raharja, struktur organisasi, permasalahan yang dihadapi, alternatif pemecahan masalah, analisa proses, sistem yang berjalan, serta alternatif pemecahan masalah. | |
| BAB IV | HASIL PENELITIAN |
| Bab ini berisikan Metode Pengujian Alat, Pengujian Black Box Sistem Yang Diusulkan, Pengujian Prototipe Alat, Konfigurasi Sistem Usulan, Implementasi, Hak Akses, Schedule, dan Estimasi Biaya Penelitian atau Pembuatan Alat. | |
| BAB V | PENUTUP |
| Bab ini berisi Kesimpulan dari hasil penelitian dan pengujian alat, beberapa Saran untuk pengembangan lebih lanjut, serta Kesan dalam menjalankan Skripsi. |
DAFTAR PUSTAKA
Daftar pustaka ini berisi studi pustaka yang digunakan sebagai referensi untuk
menyusun laporan ini.
LAMPIRAN
Lampiran ini merupakan daftar yang memuat keseluruhan lampiran-lampiran
yang melengkapi laporan sebagai lampiran.
BAB II
Teori Umum
Konsep Dasar Sistem
Definisi Sistem
Menurut Rusdiana dan Moch Irfan (2014:29)[1], “Sistem merupakan kumpulan dari beberapa bagian yang memiliki keterkaitan dan saling bekerja sama serta membentuk suatu kesatuan untuk mencapai tujuan dari sistem tersebut”.
Menurut Taufiq (2013:2)[2], “Sistem adalah kumpulan dari sub-sub sistem abstrak maupun fisik yang saling terintegrasi dan berkolaborasi untuk mencapai suatu tujuan tertentu”
Dari beberapa pendapat diatas, dapat disimpulkan bahwa sistem adalah sekelompok unsur yang saling terhubung satu sama lain yang saling berinteraksi untuk mencapai tujuan tertentu.
Karakteristik Sistem
Menurut Hartono (2013:14)[3], bahwa sebuah sistem memiliki paling sedikit sepuluh karakteristik sebagai berikut :
- Komponen (Components)
Komponen Sistem adalah bagian-bagian atau elemen-elemen yang dapat berupa benda atau manusia, berbentuk nyata atau abstrak, dan disebut subsistem - Penghubung antar bagian (Interface)
Sesuatu yang bertugas menjembatani satu bagian dengan bagian lain, dan memungkinkan terjadinya interaksi/komunikasi antar bagian. - Batas (Boundary)
Sesuatu yang membedakan antara satu sistem dengan sistem atau dengan sistem-sistem lain. - Lingkungan (Environment)
Segala sesuatu yang berada diluar sistem dan dapat bersifat menguntungkan atau merugikan sistem yang bersangkutan. - Masukan (Input)
Sesuatu yang merupakan bahan untuk diolah atau diproses oleh sistem. - Keluaran (Output)
Berbagai macam bentuk hasil atau produk yang dikeluarkan dari pengolahan. - Tujuan (Goal/Objective)
Sesuatu atau keadaan yang ingin dicapai oleh sistem, baik dalam jangka pendek maupun jangka panjang. - Sensor dan Kendali (Sensor and Control)
Sesuatu yang bertugas untuk memantau dan menginformasikan perubahan-perubahan didalam lingkungan dan dalam diri sistem kepada sistem. - Umpan Balik (Feedback)
Informasi tentang perubahan-perubahan lingkungan dan perubahan-perubahan (penyimpangan) dalam diri sistem.
Klasifikasi Sistem
Menurut A.Rusdiana dan Moch.Irfan (2014:35)[1], Sistem dapat diklasifikasikan dari beberapa sudut pandang, diantaranya :
- Sistem Abstrak dan Sistem Fisik.
Sistem Abstrak adalah sistem yang berupa pemikiran atau ide-ide yang tidak tampak secara fisik. Misalnya sistem teologia, yaitu sistem yang berupa pemikiran-pemikiran hubungan antara manusia dengan Tuhan. Sistem Fisik merupakan sistem yang ada secara fisik. Misalnya sistem komputer, sistem akutansi, sistem produksi, dan sebagainya. - Sistem Alamiah dan Sistem Buatan Manusia.
Sistem Alamiah adalah sistem yang terjadi melalui proses alam, tidak dibuat manusia. Misalnya sistem perputaran bumi. Sistem Buatan Manusia yang melibatkan interaksi antara manusia dan mesin disebut dan human-machine system atau ada yang menyebutkan dengan man-machine system. Sistem informasi akutansi merupakan contoh man-machine system karena menyangkut penggunaan komputer yang berinteraksi dengan manusia. - Sistem Tertentu dan Sistem Tidak Tentu.
Sistem Tertentu beroperasi dengan tingkah laku yang sudah dapat di prediksi. Interaksi diantara bagian-bagiannya dapat dideteksi dengan pasti sehingga keluaran dari sistem dapat diramalkan. Sistem Komputer adalah contoh dari sistem tertentu yang tingkah lakunya dapat dipastikan berdasarkan program-program yang dijalankan. Sistem Tidak Tentu adalah sistem yang kondisi masa depannya tidak dapat di prediksi karena mengandung unsur probabilitas. - Sistem Tertutup dan Sistem Terbuka.
Sistem Tertutup merupakan sistem yang tidak berhubungan dengan lingkungan luarnya. Sistem ini bekerja secara otomatis tanpa adanya turut campur tangan dari pihak luarnya. Secara teoritis sistem tertutup ini ada, tetapi kenyataannya tidak ada sistem yang benar-benar tertutup, yang ada hanyalah relatively closed system (secara relatif tertutup, tidak benar-benar tertutup). Sistem Terbuka adalah sistem yang berhubungan dan terpengaruh dengan lingkungan luarnya. Sistem ini menerima masukan dan menghasilkan keluaran untuk lingkungan luar atau subsistem lainnya. Karena sistem bersifat terbuka dan terpengaruh oleh lingkungan luarnya, suatu sistem harus mempunyai sistem pengendalian yang baik.
Tujuan Sistem
Menurut Taufiq (2013:5)[2],“Tujuan Sistem merupakan sasaran atau hasil yang diinginkan. Manusia, tumbuhan, hewan organisasi, lembaga dan lain sebagainya pasti memiliki tujuan yang bermanfaat minimal bagi dia sendiri atau bagi lingkungannya. Tujuan sangatlah penting karena tanpa tujuan yang jelas segala sesuatu pasti akan hancur dan berantakan tapi dengan tujuan yang jelas akan lebih besar kemungkinan akan tercapai sasarannya. Begitu juga sistem yang baik adalah sistem yang memiliki tujuan yang jelas dan terukur yang memungkinkan untuk dicapai dan memiliki langkah-langkah yang terstuktur untuk mencapainya. Dengan tujuan yang jelas dan terukur serta menggunkan langkah-langkah terstruktur kemungkinan besar sistem itu akan tercapai tujuannya sesuai dengan apa yang telah menjadi tujuannya”.
Konsep Dasar Sistem Komputer
A. Definisi Sistem Komputer
Menurut Rita Melina (2016:1)[4],“Sistem komputer adalah elemen-elemen yang terkait menjalankan suatu aktifitas dengan menggunakan komputer. Elemen dari komputer terdiri dari manusianya (brainware) perangkat lunak (software) dan perangkat keras (hardware).
Komponen-komponen dalam sistem komputer terbagi 3, yang tidak bisa terpisahkan satu dengan yang lainnya yaitu:
- Hardware (Perangkat Keras)
- Perangkat output
- Perangkat input
- Media penyimpanan
- Pemrosesan
- Software (Perangkat Lunak)
- Sistem operasi
- Program aplikasi
- Bahasa pemograman
- Brainware (Orang Yang Mengoperasikan Komputer)
- Analisa sistem
- Programmer
- Operator
B. Jenis-jenis Hardware
Menurut Rita Melina (2016:1)[4],Jenis-jenis hardware terdiri dari 9 bagian diantaranya sebagai berikut :
- CPU (Central Processing Unit)
Memproses atau mengeksekusi intruksi atau program. CPU juga akan berkomunikasi dengan perangkat input, output, dan storage. - ALU (Arithmetic Logic Unit)
Alat yang melakukan operasi aritmatika dengan dasar penjumlahan. Tujuan menghasilkan keputusan dari operasi logika sesuai dengan intruksi program - CU (Control Unit)
Mengatur dan mengendalikan semua peralatan yang ada pada sistem komputer. Mengartikan dan mengirimkan intruksi ke ALU. Membawa data dari alat input ke memori utama untuk di olah. Membawa hasil olahan data kembali ke memori utama untuk disimpan. - Register
Alat penyimpanan berukuran kecil dengan kecepatan akses cukup tinggi. Fungsi penyimpanan data dan intruksi yang sedang di proses, sementara data dan intruksi lainnya menunggu di dalam memori utama. - Input Device
Perangkat keras komputer yang berfungsi sebagai alat untuk memasukan perintah ke dalam komputer. Alat : keyboard, Microfont, dll - Output Device
Berfungsi untuk menampilkan keluaran sebagai hasil pengolahan data. Alat : monitor, Printer, Speaker, Storage device - RAM (Read Access Memory)
Menyimpan program yang diolah untuk sementara waktu. - ROM (Read Only Memory)
Memori yang hanya bisa di baca dan berguna sebagai penyedia informasi pada saat komputer pertama kali digunakan. Berupa sistem operasi yang terdiri dari program. - Storage Eksternal
Perangkat lunak untuk melakukan operasi penulisan, pembacaan dan penyimpanan data diluar komponen utama.
C. Jenis-jenis Software
- Sistem Operasi
Program data pada komputer yang menghitungkan pengguna dengan hardware dan software komputer. - Program Aplikasi
Program yang di desain untuk melakukan fungsi secara spesifik yang berhubungan langsung dengan pengguna. - Bahasa Pemogramman
Bahasa yang digunakan oleh manusia untuk berkomunikasi dengan komputer.
Konsep Dasar Pengontrolan
A. Definisi Pengontrolan
Menurut Akhmad Insya (2013:1)[5], “Sistem kontrol (control system) merupakan suatu kumpulan cara atau metode yang dipelajari dari kebiasaan-kebiasaan manusia dalam bekerja, dimana manusia membutuhkan suatu pengamatan kualitas dari apa yang telah mereka kerjakan sehingga memiliki karakteristik sesuai dengan yang diharapkan pada mulanya”. Perkembangan teknologi menyebabkan manusia selalu terus belajar untuk mengembangkan dan mengoperasikan pekerjaan-pekerjaan kontrol yang semula dilakukan oleh manusia menjadi serba otomatis (dikendalikan oleh mesin). Dalam aplikasinya, sistem kontrol memegang peranan penting dalam teknologi. Sebagai contoh, otomatisasi industri dapat menekan biaya produksi, mempertinggi kualitas, dan dapat menggantikan pekerjaan-pekerjaan rutin yang membosankan. Sehingga dengan demikian akan meningkatkan kinerja suatu sistem secara keseluruhan, dan pada akhirnya memberikan keuntungan bagi manusia yang menerapkannya.
Dalam aplikasinya, suatu sistem kontrol memiliki tujuan/sasaran tertentu. Sasaran sistem kontrol adalah untuk mengatur keluaran (output) dalam suatu sikap / kondisi / keadaan yang telah ditetapkan oleh masukan (input) melalui elemen sistem kontrol.
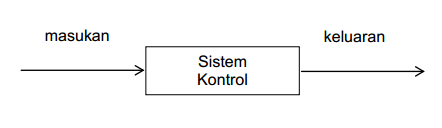
Gambar 2.1. Sistem Kontrol
Dengan adanya sasaran ini, maka kualitas keluaran yang dihasilkan tergantung dari proses yang dilakukan dalam sistem kontrol ini.
A. Definisi Pengontrolan
A. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi dkk dalam jurnal mekanikal Vol 3 No 2 (2012:261)[6], sistem kontrol loop terbuka adalah ”suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem kontrol ini, nilai keluaran tidak di umpan-balikkan ke parameter pengendalian. Gambar diagram blok diatas menggambarkan bahwa didalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya kealat terkendali.”
B. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi dkk dalam jurnal mekanikal Vol 3 No 2 (2012:261)[6], sistem kontrol loop tertutup adalah “Suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan.” Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendekati hasil yang diinginkan.
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari suatu loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalsikan tersebut. Dalam berbagai sistem pengendalian, sinyal input dihasilkan oleh mikrokontroler.
Konsep Dasar Prototipe
A. Definisi Prototipe
Menurut Darmawan (2013:229)[7],“Prototype adalah suatu versi dari sebuah sistem potensial yang memeberikan ide bagi para pengembang dan calon pengguna, bagaimana sistem akan berfungsi dalam bentuk yang telah selesai”.
Menurut Uzzaman (2015:71)[8],“Prototype adalah produk demonstrasi. Pada tahap ini tidak semua fitur sudah diletakkan. Pengembang sering memproduksi Prototype semacam ini untuk mempresentasikan contoh produk kepada investor. Dengan demikian, investor bisa melihat produk asli dan membuktikan bahwa produk tersebut menarik dan berguna.”
Menurut Seema dan Malhotra pada International Journal Of Advances In Computing And Information Technology (2012:279[9],“Prototyping is an attractive idea for complicated and large systems for which there is no manual process or existing system to help determining the requirements. A prototype is a toy implementation of a system; usually exhibiting limited functional capabilities, low reliability, and inefficient performance.”
(“Prototyping adalah ide menarik untuk sistem yang rumit dan besar dengan tidak ada proses manual atau sistem yang ada untuk membantu menentukan kebutuhan. Sebuah prototipe adalah implementasi mainan dari sistem; biasanya, ditunjukkan dengan kemampuan terbatas fungsional, kehandalan rendah, dan kinerja yang tidak efisien.”)
Berdasarkan beberapa definisi di atas, maka dapat disimpulkan bahwa Prototype adalah sample produk atau sistem yang dibuat sebelum melaksanakan pembuatan yang sesungguhnya.
B. Jenis-jenis Prototipe
Menurut Darmawan (2013:230)[7],Terdapat dua jenis Prototipe: Evolusioner dan Persyaratan. Prototipe Evolutioner (Evolutionary Prototype) terus menerus disempurnakan sampai memiliki seluruh fungsional yang dibutuhkan pengguna dari sistem yang baru. Prototipe ini kemudian dilanjutkan produksi. Jadi satu Prototipe Evolutioner akan menjadi sistem aktual. Akan tetapi, Prototipe Persyaratan (Requrement Prototype) dikembangkan sebagai satu cara untuk mendefenisikan persyaratan-persyaratan fungsional dari sistem baru ketika pengguna tidak mampu mengungkapkan apa yang mereka inginkan. Pengembangan Prototipe Evolusioner menunjukan empat langkah dalam pembuatan suatu Prototipe Evolusioner. Empat langkah tersebut adalah :
1. Mengidentifikasi kebutuhan pengguna. Pengembang mewanwancarai pengguna untuk mendapatkan ide mengenai apa yang di minta dari sistem.
2. Membuat satu prototipe. Pengembang mempergunakan satu alat prototipe atau lebih untuk membuat prototipe.
3. Menentukan apakah prototipe dapat di terima, pengembang mendemonstrasikan prototipe kepada para pengguna untuk mengetahui apakah telah memberikan hasil yang memuaskan. jika sudah, langkah empat akan di ambil, jika tidak prototipe direvisi dengan mengulang kembali langkah satu, dua, tiga, dengan pemahaman yang lebih baik mengenai kebutuhan pengguna.
4. Menggunakan prototipe, prototipe menjadi sistem produksi.
C. Daya Tarik Prototipe
Menurut Darmawan (2013:230)[7],Pengguna maupun pengembang menyukai prototipe karena alasan-alasan di bawah ini:
1. Membaiknya komunikasi antara pengembang dan pengguna.
2. Pengembang dapat melakukan pekerjaan yang lebih baik dalam menentukan kebutuhan pengguna.
3. Pengguna memainkan peranan yang lebih aktif dalam pengembangan sistem
4. Pengembang dan pengguna menghabiskan waktu dan usaha yang lebih sedikit dalam mengembangkan sistem.
5. Implementasi menjadi jauh lebih mudah karena pengguna tahu apa yang diharapkan.
Konsep Dasar Drone
A. Definisi Dronee
Menurut Herry Tjiang (2016:1)[10], “Drone/UAV adalah Unmanned Aerial Vehicle atau disingkat UAV adalah pesawat yang diterbangkan tanpa awak atau unmanned.” UAV adalah sebuah mesin terbang yang berfungsi dengan kendali jarak jauh oleh pilot atau mampu mengendalikan dirinya sendiri, menggunakan hukum aerodinamika untuk mengangkat dirinya, bisa digunakan kembali dan mampu membawa muatan baik senjata maupun muatan lainnya.
B. Sejarah Drone Quadcopter
Penggunaan dan pengembangan teknologi drone muncul sejak awal abad 19, sebelum perang dunia I, pertama kali di tanggal 22 Agustus 1849. Pada saat itu, ada pertempuran antara Austria melawan kota Venesia, Italia. Austria yang menguasai mayoritas wilayah Italia meluncurkan ratusan balon dari kapal Austria Vulcano. Dan balon-balon tersebut pun berhasil mengenai target, walaupun beberapa diantaranya justru meleset berubah arah karena tertiup angin dan malah meledak di perbatasan Austria dan Italia.
Kemudian, pada 8 November 1898, Nicolas Tesla, penemu AS keturunan Serbia mematenkan remote control atau pengendali jarak jauh temuannya. Remote control ini menjadi dasar ilmu robotik kontemporer. Tesla membuat kapal dan balon yang bisa dikendalikan dari jarak jauh. Perkembangan Drone. Kemudian pada era Perang Dunia II, Drone digunakan untuk alat latihan para tentara untuk menembak target. Militer Jerman dari pemerintahan Nazi juga menggunakan drone sebagai senjata udara UAV sepanjang Perang Dunia II tersebut.
1. Era perang dunia
Pesawat tanpa pilot pertama dikembangkan selama dan setelah Perang Dunia I. Yang pertama adalah “Aerial Target” dikembangkan pada 1916 ini dimaksudkan untuk meniru Zeppelins, tetapi tidak pernah terbang. Tak lama kemudian, Hewitt-Sperry Automatic Airplane (bom terbang) melakukan penerbangan perdananya, menunjukkan konsep pesawat tak berawak. UAV ini rencananya digunakan sebagai torpedo udara, versi awal dari rudal jelajah modern. Pengendalian pesawat ini dengan menggunakan giroskop.

Gambar 2.4. Drone Aerial Target
Pada bulan November 1917, Hewitt-Sperry Automatic Airplane ditunjukkan untuk Angkatan Darat AS. Setelah keberhasilan demonstrasi ini, Angkatan Darat menugaskan sebuah proyek untuk membangun sebuah torpedo udara, yang kemudian dikenal sebagai Bug Kettering dan terbang tahun 1918. Beberapa penerus dikembangkan selama periode setelah Perang Dunia I dan sebelum Perang Dunia II. Ini termasuk Laring, diuji oleh Royal Navy antara tahun 1927 dan 1929, Fairey “Queen” yang dikembangkan oleh Inggris pada tahun 1931 masih oleh Inggris dengan UAV “DH 82B Queen Bee” pada tahun 1935. Dari UAV inilah pertama kali digunakan istilah ”drone” Pesawat tanpa pilot pertama dikembangkan selama dan setelah Perang Dunia I. Yang pertama adalah “Aerial Target,” dikembangkan pada 1916 ini dimaksudkan untuk meniru Zeppelins, tetapi tidak pernah terbang. Tak lama kemudian, Hewitt-Sperry Automatic Airplane (bom terbang) melakukan penerbangan perdananya, menunjukkan konsep pesawat tak berawak. UAV ini rencananya digunakan sebagai torpedo udara, versi awal dari rudal jelajah modern. Pengendalian pesawat ini dengan menggunakan giroskop. Pada bulan November 1917, Hewitt-Sperry Automatic Airplane ditunjukkan untuk Angkatan Darat AS. Setelah keberhasilan demonstrasi ini, Angkatan Darat menugaskan sebuah proyek untuk membangun sebuah torpedo udara, yang kemudian dikenal sebagai Bug Kettering dan terbang tahun 1918.Beberapa penerus dikembangkan selama periode setelah Perang Dunia I dan sebelum Perang Dunia II. Ini termasuk Laring, diuji oleh Royal Navy antara tahun 1927 dan 1929, Fairey “Queen” yang dikembangkan oleh Inggris pada tahun 1931 masih oleh Inggris dengan UAV “DH.82B Queen Bee” pada tahun 1935. Dari UAV inilah pertama kali digunakan istilah ”drone” Selama Perang Dunia II, drone digunakan baik sebagai alat latihan untuk target menembak untuk sistem pertahanan udara maupun pesawat terbang. Nazi Jerman juga telah diproduksi dan menggunakan UAV selama Perang Dunia II. Setelah perang, mesin jet yang diterapkan untuk drone, dengan yang pertama adalah Teledyne Ryan Firebee I 1951 Pada tahun 1955, Model 1001, dikembangkan oleh Beechcraft yang dibuat untuk Angkatan Laut Amerika Serikat. UAV ini tidak lebih dari pesawat yang dikendalikan remote sampai Era Vietnam.
2. Era Modern
Pesawat drone pertama UAV milik USA Kelahiran UAV Amerika dimulai pada 1959 ketika Angkatan Udara AS, khawatir kehilangan pilot di atas wilayah musuh, mulai merencanakan penerbangan tanpa awak. Setelah Soviet berhasil menembak pesawat mata-mata mereka U-2 pada tahun 1960, program UAV yang sangat rahasia diluncurkan dengan kode “Red Wagon.” UAV era-modern digunakan pertama selama 2 Agustus dan 4 Agustus. Pada 1964 ketika terjadi bentrokan di Teluk Tonkin antara AS dan angkatan laut Vietnam Utara. Selama Perang Vietnam. Ketika China menunjukkan foto-foto pesawat tanpa awak AS yang jatuh setelah Perang Vietnam respon Angkatan Udara AS hanyalah “no comment.” Namun, pada 1973, militer AS akhirnya secara resmi mengkonfirmasi bahwa mereka telah memanfaatkan teknologi UAV di Vietnam, yang menyatakan bahwa selama perang, lebih dari 3.435 misi UAV diterbangkan, dimana sekitar 554 hilang dalam pertempuran.

Gambar 2.5. Drone UAV USA
Ketika Perang Yom Kipur 1973, Israel mengembangkan UAV pertama dengan real-time surveilans. Setelah itu rudal permukaan udara Soviet yang digunakan Mesir dan Suriah bisa digempur jet Israel hingga rusak parah. Gambar dan radar decoying disediakan oleh UAV ini membantu Israel untuk menetralisir pertahanan udara Suriah pada awal 1982 ketika Perang Libanon, sehingga tidak ada pilot yang yang tewas. Pada tahun 1987, Israel telah mengembangkan UAV berbasis siluman, dorong tiga dimensi vectoring kontrol, UAV jet untuk pertama kalinya.
Perkembangan teknologi UAV tumbuh pesat selama tahun 1980 dan 1990 yang digunakan selama Perang Teluk Persia pada 1991 dan menjadi mesin pertempuran lebih murah dan lebih mampu. Sementara sebagian besar drone dari tahun-tahun sebelumnya yang terutama pesawat pengintai, beberapa telah berevolusi dengan mampu membawa amunisi. General Atomics MQ-1, yang menggunakan AGM-114 Hellfire rudal udara-ke-permukaan dikenal sebagai kendaraan udara tempur tak berawak (UCAV).
3. Setelah Serangan Teroris
Sementara kebanyakan UAV yang digunakan oleh militer, teknologi ditugaskan oleh CIA setelah serangan teroris 11 September 2001. Operasi pengumpulan intelijen dimulai pada tahun 2004, dengan UAV CIA yang dioperasikan terutama terbang di atas Afghanistan, Pakistan, Yaman, dan Somalia. Program UAV pertama CIA disebut Eagle Program. Pada 2008, USA telah mempekerjakan 5.331 UAV, yang berarti dua kali jumlah pesawat berawak. Dari jumlah tersebut, Predator telah menjadi yang paling dipuji. Tidak seperti UAV lain, Predator dipersenjatai dengan rudal Hellfire. Predator digunakan selama perburuan Osama Bin Laden dan telah menunjukkan kemampuan menunjuk laser pada target untuk akurasi. Keberhasilan keseluruhan dari misi Predator jelas karena dari Juni 2005 sampai Juni 2006 saja, Predator melakukan 2,073 misi sukses dalam 242 serangan terpisah.

Gambar 2.6. Drone Predator USA
Sementara Predator dioperasikan dari jarak jauh melalui satelit dari lebih dari 7.500 mil jauhnya, Global Hawk beroperasi hampir mandiri. Setelah pengguna menekan tombol, menyiagakan UAV lepas landas, satu-satunya interaksi antara darat dan UAV adalah petunjuk arah melalui GPS. Global Hawks memiliki kemampuan untuk lepas landas dari San Francisco, terbang melintasi Amerika Serikat, dan memetakan seluruh negara bagian Maine sebelum kemudian kembali. Pada Februari 2013, dilaporkan bahwa UAV yang digunakan oleh setidaknya 50 negara, beberapa di antaranya telah membuat sendiri, termasuk Iran, Israel dan China.
C. Jenis-jenis Drone
• Fixed Wing Drone
Drone jenis ini berbentuk seperti pesawat komersial dan digunakan untuk proses yang cepat daya jangkau lebih cepat serta lebih luas, biasanya untuk pemetaan (mapping) atau konsepnya seperti scanning. Drone jenis Fixed Wing memiliki energi lebih irit baterai karena single baling-baling.
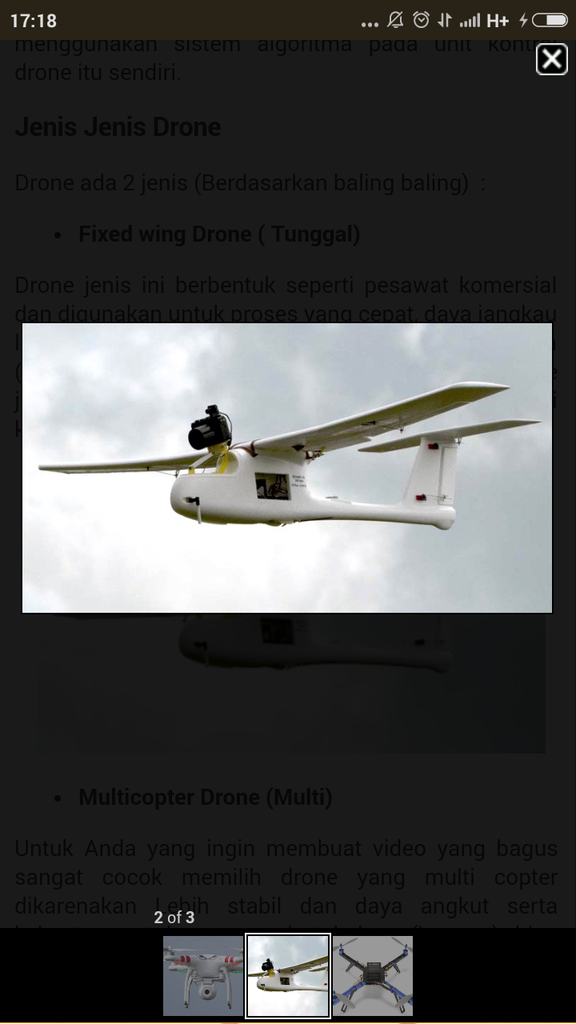
Gambar 2.7. Fixed Wing Drone
2. Multicopter Drone
Multicopter drone adalah drone yang memiliki beberapa baling-baling sehingga cocok untuk mengambil gambar atau video dikarenakan lebih stabil dan daya angkut serta kekuatan untuk mengangkat beban (kamera) yang lebih berat. Semakin banyak baling-baling semakin stabil dan lebih aman. Beberapa jenis baling-baling :
a. 3 baling-baling (Threecopter)
b. 4 baling-baling (Quadcopter)
c. 6 baling-baling (Hexacopter)
d. 8 baling-baling (Octacopter)
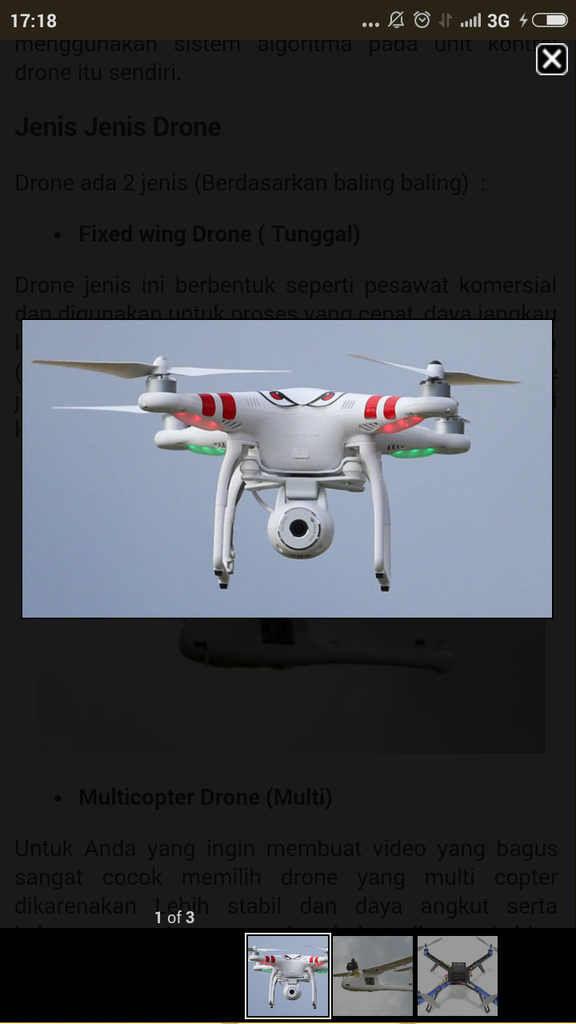
Gambar 2.8. Quadcopter Drone
Penggunaan Drone Quadcopter
Menurut Ardy (2015:1)[11], bahwa drone memiliki 8 fungsi dan kegunaannya sebagai berikut :
1. Militer
Fungsi drone sekarang semakin sering digunakan dalam berbagai keperluan tidak hanya untuk operasi militer tapi juga sebagai mata-mata. Beberapa drone dilengkapi dengan sistem persenjataan.

Gambar 2.9. Drone Militer Indonesia
2. Medis
Pesawat drone kini mulai dikembangkan untuk tujuan kesehatan, misalnya untuk mengangkut obat-obatan dan peralatan medis kedaerah yang sulit dijangkau, terutama untuk menembus daerah-daerah konflik atau bencana

Gambar 2.10. Drone untuk medis
3. Agrikultur
Drone juga banyak digunakan di sektor pertanian misalnya untuk evaluasi kondisi tanah, untuk mengidentifikasi hama yang menyerang tanaman, pemetaan traktor, atau untuk menyebarkan pestisida, air dan pupuk.
Gambar 2.11. Drone menyemprotkan pestisida
4. Pemantauan Cuaca
Drone juga dapat digunakan untuk keperluan laporan cuaca, badai mendeteksi, memprediksi dan mempelajari kondisi cuaca saat itu.

Gambar 2.12. Drone pemantau kondisi cuaca
5. Pemetaan
Fungsi lainnya dari pesawat drone adalah untuk pemetaan langsung dilapangan yang hasilnya nanti digunakan untuk pembuatan peta tiga dimensi, foto atau citra yang dihasilkan kemudian diproses dan dibuat menjadi peta untuk kemudian dilakukan analisis.
Gambar 2.13 Drone Untuk Pemetaan
6. SAR
Dibidang keselamatan udara drone juga sudah dimulai digunakan untuk operasi pencarian dan penyelamatan, terutama pada malam hari di daerah yang luas dan sulit dijangkau. Drone juga digunakan untuk memantau satwa liar, memantau populasi dan kehidupan hewan serta membantu dalam kegiatan konservasi hutan.
Gambar 2.14. Drone Pencarian orang hilang

Gambar 2.14. Drone Pencarian orang hilang
7. Pemantauan Lalu Lintas
Di bidang transportasi lalu lintas, drone digunakan untuk memantau kemacetan lalu lintas dikota. Biasanya digunakan oleh polisi untuk memantau kondisi real di lapangan pada saat itu.

Gambar 2.16. Drone memantau kemacetan lalu lintas
8. Jurnalis
Pesawat drone juga sedang dikembangkan untuk keperluan jurnalisme, misalnya untuk mengambil foto, mengambil gambar, merekam video dan pengumpulan data.

Gambar 2.17. Drone Jurnalis
Teori Khusus
Konsep Dasar Flight Control Board
A. Definisi Flight Control Board
Menurut Caesar Wiratama (2016:1)[12], ”Flight controller adalah otak dari drone, Flight controller ini membaca sinyal-sinyal dari sensor dan melakukan kalkulasi untuk memerintahkan drone bergerak sesuai keinginan”. Adapun berikut ini adalah penjelasan dari fitur-fitur yang ada pada Arducopter versi 2.6 :.
DAFTAR PUSTAKA
- ↑ 1,0 1,1 Rusdiana, Irfan. 2014. “Sistem Informasi Manajemen”. Bandung: Pustaka Setia.
- ↑ 2,0 2,1 Taufiq, Rohmat. 2013 “Sistem Informasi Manajemen”. Yogyakarta : Graha Ilmu Offset
- ↑ Hartono, Bambang. 2013 “Sistem Informasi Manajemen Berbasis Komputer. ”. Jakarta : PT Asdi Mahasatya Offset
- ↑ 4,0 4,1 Melina, Rita. 2016“Dasar Sistem Komputer.”. Diambil dari https://blog.uad.ac.id
- ↑ Akhmad Insya. 2013.
- ↑ 6,0 6,1 Akhmad Insya. 2013. Sistem Kontrol Loop Terbuka". jurnal mekanikal Vol 3 No 2 Juli 2012
- ↑ 7,0 7,1 7,2 Darmawan, Deni. 2013Sistem Informasi Manajemen.". Bandung : PT Remaja Rosdakarya Offset
- ↑ Uzzaman, Anis. 2015Devinisi Prototype. ". Yogyakarta
- ↑ Seema, Sona Malhotra. 2012. Analysis and tabular comparison of popular SDLC models. International Journal Of Advances In Computing And Information Technology (IPAJOURNALS 2012) ".
- ↑ Tjiang, Herry. 2016“Istilah Pengertian dan Jenis Drone.”. Diambil dari http://www.herrytjiang.com.
- ↑ Ardi. 2015.“Fungsi dan Penggunaan Drone ”. diambil dari http://airdronesia. blogspot.co.id
- ↑ Wiratama, Caesar. 2016 “Dasar-dasar Flight Controller. ”.Diambil dari http://aeroengineering.co.id.