SI1031465420: Perbedaan revisi
| [revisi tidak terperiksa] | [revisi tidak terperiksa] |
| Baris 953: | Baris 953: | ||
<p> | <p> | ||
<strong>LAMPIRAN </strong> | <strong>LAMPIRAN </strong> | ||
| + | </p> | ||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | |||
| + | <p align="center"> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p align="center"> | ||
| + | <strong>BAB II</strong> | ||
| + | </p> | ||
| + | <p align="center"> | ||
| + | <strong>LANDASAN TEORI</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1. </strong> | ||
| + | <strong> </strong> | ||
| + | <strong>Teori Umum</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.1. </strong> | ||
| + | <strong> Konsep Dasar </strong> | ||
| + | <strong>Sistem</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Sistem</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem berasal dari bahasa latin <em>(systema) </em>dan bahasa yunani <em>(sustema) </em>adalah suatu kesatuan yang terdiri dari komponen atau elemen yang | ||
| + | dihubungkan bersama untuk memudahkan aliran informasi, materi, atau energi untuk mencapai suatu tujuan. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Jerry Fithgerald (2009:2), ”Sistem dapat didefinisikan dengan pendekatan prosedur dan pendekatan komponen, sistem dapat didefinisikan sebagai | ||
| + | kumpulan dari prosedur-prosedur yang mempunyai tujuan tertentu”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Sutarman (2012:13), ”Sistem adalah kumpulan elemen yang saling berhubungan dan berinteraksi dalam satu kesatuan untuk menjalankan suatu proses | ||
| + | pencapaian suatu tujuan utama”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Mustakini (2009:34), ” Sistem dapat didefinisikan dengan pendekatan prosedur dan pendekatan komponen, sistem dapat didefinisikan sebagai kumpulan | ||
| + | prosedur-prosedur yang mempunyai tujuan tertentu”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Diana dan Setiawati (2011:3), ”Sistem adalah serangkaian bagian yang saling tergantung dan bekerjasama untuk mencapai tujuan tertentu”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Mulyanto (2009:1), ”Secara umum, sistem dapat diartikan sebagai kumpulan dari elemen-elemen yang berinteraksi untuk mencapai suatu tujuan tertentu | ||
| + | sebagai suatu kesatuan”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dari beberapa definisi sistem yang dikemukakan diatas, dapat diambil kesimpulan bahwa sistem adalah sekumpulan komponen atau elemen yang bekerjasama sesuai | ||
| + | dengan fungsinya dan saling berhubungan untuk mencapai suatu tujuan tertentu. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2. Karakteristik Sistem</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Setiap sistem mempunyai ciri-ciri atau karakteristik tersendiri (Hanif 2007:5).berikut ini adalah karakteristik tersebut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Masukan <em>(input)</em>: Sumber daya (data, bahan baku, peralatan, energi) dari lingkungan yang dikonsumsi dan dimanipulasi oleh suatu sistem. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Komponen Sistem (<em>Components</em>): Kegiatan atau proses dalam suatu sistem yang mentransformasikan input menjadi bentuk setengah jadi (output) | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Keluaran (<em>Output</em>): Merupakan hasil dari energi yang diolah dan diklasifikasikan menjadi keluaran yang berguna dan sisa pembuangan. Keluaran | ||
| + | dapat merupakan masukan untuk subsistem yang lain atau kepada supra sistem. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Batas Sistem (<em>Boundary</em>): Merupakan daerah yang membatasi suatu sistem dengan sistem yang lainnya atau dengan lingkungan luarnya. Batas sistem | ||
| + | ini memungkinkan suatu sistem dipandang sebagai satu kesatuan. | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Lingkungan Luar Sistem (<em>Environments</em>) : Lingkungan luar dari suatu sistem adalah apapun diluar batas sistem yang mempengaruhi operasi sistem. | ||
| + | Lingkungan luar sistem dapat bersifat merugikan atau menguntungkan sistem tersebut. | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Penghubung <em>(interface)</em> : Tempat di mana komponen atau sistem dan lingkungannya bertemu atau berinteraksi. | ||
| + | </p> | ||
| + | <p> | ||
| + | 7. Pengolahan Sistem <em>(Process) </em>: Pengolahan sistem merupakan bagian yang melakukan perubahan dari masukan untuk menjadi keluaran yang diinginkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | 8. Sasaran Sistem <em>(Objective and Goal) </em>: Suatu sistem pasti memiliki sasaran atau tujuan, apabila sistem menjadi tidak mempunyai sasaran, maka | ||
| + | operasi sistem tidak akan ada gunanya. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>3. Klasifikasi Sistem </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Mulyanto (2009:8), Sistem dapat diklasifikasikan dari berbagai sudut pandang, diantaranya adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Sistem Abstrak <em>(Abstract system) </em>dan Sistem Fisik <em>(Physical system).</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Abstrak<em>(Abstract system)</em> adalah sistem yang berupa pemikiran atau gagasan yang tidak tampak secara fisik. Contoh: sistem teologi yaitu | ||
| + | sebuah pemikiran tentang hubungan antara manusia dengan Tuhan. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sedangkan Sistem Fisik<em>(Physical system)</em> adalah sistem yang ada secara fisik dan dapat dilihat dengan mata. Contoh: sistem komputer, sisten | ||
| + | akutansi, sistem tranportasi, dan lain sebagainya. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Sistem Alamiah <em>(Natural system) </em>dan Sistem Buatan Manusia <em>(Human mode system). </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Alamiah<em>(Natural system)</em> adalah sistem yang terjadi melalui proses alam, tidak dibuat manusia. Contoh: perputaran bumi. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Buatan Manusia<em>(Human mode system)</em> adalah sistem yang dirancang oleh manusia. Sistem buatan manusia yang melibatkan interaksi antara manusia | ||
| + | dengan mesin. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Sistem Tertentu <em>(Deterministic system) </em>dan Sistem Tak tertentu <em>(Probability system) </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem tertentu<em>(Deterministic system) </em>melibatkan operasi yang sudah dapat di duga dengan pasti, dapat dideteksi dan diramalkan hasil keluarannya, | ||
| + | contohnya adalah sistem komputer dimana tingkah lakunya dapat diatur dengan baris-baris program yang dijalankan. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Tak Tentu (<em>Probabilitas System</em>) yaitu sistem yang tidak dapat diprediksikan kejadiannya, misalnya kejadian-kejadian dimasa yang akan datang | ||
| + | merupakan hal rahasia dan tidak dapat diprediksikan karena menyangkut unsur probabilitas. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Sistem Terbuka <em>(Opened system) </em>dan Sistem Tertutup <em>(Closed system) </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Terbuka <em>(Opened system) </em>adalah sistem yang bekerja karena pengaruh dari pihak luarnya. Oleh karena itu perlu adanya sistem pengendalian | ||
| + | yang dapat menjaga agar pengaruh tersebut hanya berupa pengaruh yang baik saja. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem Tertutup <em>(Closed system) </em>yaitu merupakan sistem yang tidak terpengaruh atau tidak terganggu oleh lingkungan luarnya. Karena bekerja secara | ||
| + | otomatis tanpa campur tangan dari pihak luarnya. Walaupun tidak ada sistem yang benar-benar tertutup, yang ada hanyalah sistem relatif tertutup ( <em>relatively closed system</em>). | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.2. </strong> | ||
| + | <strong>Konsep Dasar Pengontrolan </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>1. Definisi Pengontrolan </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Pada bagian teori ini akan dijelaskan mengenai dasar teori yang berkaitan dengan sistem-sistem hardware dan software yang membangun prototype robot | ||
| + | penyiram tanaman ini seperti, | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Erinofiardi (2012:261), “Suatu sistem control otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia | ||
| + | (otomatis)”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Kontrol otomatis mempunyai peran penting dalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmu pengetahuan dan teknologi, sistem control | ||
| + | otomatis telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengan cara yang lebih mudah. | ||
| + | </p> | ||
| + | <p> | ||
| + | Berdasarkan Ejaan Yang Disempurnakan (EYD) pengontrolan berasal dari kata control, control sama dengan pengawasan, pemeriksaan, dan pengendalian. Pada | ||
| + | industry besar dan modern sangat memerlukan tenaga ahli perencanaan sistem pengendali dan perancangan desain sistem pengendali, termasuk teknisi | ||
| + | professional sebagai operator. Dan tidak menutup kemungkinan bahwa pengontrolan berasal dari disiplin ilmu yang saling berhubungan karena teori sistem | ||
| + | pengendali modern dikembangkan guna mengatasi kerumitan yang dijumpai pada berbagai sistem pengendalian yang menuntut kecepatan dan ketelitian yang tinggi | ||
| + | dengan hasil output yang optimal. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka (<em>Open-loop Control System</em>) dan sistem pengendali Loop Tertutup ( <em>Closed-loop Control System</em>). | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2. Jenis-Jenis Pengontrolan </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> A. Sistem Kontrol Loop Terbuka </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Erinofiardi (2012:261) “Sistem kontrol loop terbuka adalah suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. | ||
| + | Dengan demikian pada sistem control ini, nilai keluaran tidak diumpan- balikan ke parameter pengendalian”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.1. Sistem pengendalian <em>loop </em>terbuka </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: Erinofiardi (2012:261) </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Gambar diagram blok diatas menggambarkan bahwa di dalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi | ||
| + | kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>B. Sistem Kontrol Loop Tertutup </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Erinofiardi (2012:261), Sistem loop tertutup adalah “suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi | ||
| + | pengendalian yang dilakukan”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran | ||
| + | dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendeklarasi hasil yang diinginkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.2. Sistem pengendali <em>loop </em>tertutup </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber : Erinofiardi (2012:261)</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Gambar diatas menyatakan hubungan antara masukan dan keluaran dari loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik | ||
| + | menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran | ||
| + | yang akan dikirim ke alat terkendali. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalikan tersebut, dalam berbagai sistem | ||
| + | pengendali, sinyal input dihasilkan oleh mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.3. Definisi Alat </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Alat adalah suatu benda yang dipakai untuk mengerjakan sesuatu perkakas, perabot, yang dipakai untuk mencapai maksud <em>(Kamus Besar Bahasa Indonesia, 2005, hal: 30).</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em> </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.4. Perkembangan Alat Penyiram Tanaman </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Dunia teknologi saat ini menunjukan perkembangan yang cukup berarti dari waktu ke waktu. Salah satu dari pengaruh tersebut adalah perkembangan bagaimana | ||
| + | sistem penyiraman yang ada saat ini semakin maju berkembang, Apalagi jika sistem tersebut bergerak dengan suatu kontrol yang terpadu, maka hal ini akan | ||
| + | membawa dampak kepada manusia untuk bisa memikirkan dan membuat suatu bentuk kontrol yang sekiranya akan dapat membantu dengan efisien. | ||
| + | </p> | ||
| + | <p> | ||
| + | Penyiraman merupakan suatu hal yang tidak dapat dilepaskan di dalam menjaga serta merawat agar tanaman dapat tumbuh dengan subur. Kebutuhan air yang cukup | ||
| + | merupakan salah satu hal yang sangat penting, dengan alat penyiram tanaman yang berkembang, diharapakan dapat menyesuaikan segala kekurangan dari sistem | ||
| + | penyiram tanaman yang sudah ada. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem alat penyiram tanaman ada beberapa cara dalam mengontrol sistem tersebut ada yang bersifat temporari/ sementara dan ada yang bersifat permanen, | ||
| + | sistem yang sementara tersebut adalah seperti alat penyiram tanaman tersebut mengontrol suhu, kelembapan, dan lain-lain. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dari sisi sistem yang bersifat permanen adalah seperti bagaimana alat penyiram tanaman mengontrol kebutuhan akan penyinaran atau intensitas cahaya yang | ||
| + | diperlukan, dan mengontrol kebutuhan air yang cukup untuk tanaman tersebut. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.5. Konsep Dasar Pemprograman VB.NET </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Microsoft Visual Basic atau yang sering disingkat sebagai VB merupakan sebuah bahasa pemprograman yang menawarkan <em>Integrated Development Environment </em>(IDE) visual untuk membuat program perangkat lunak berbasis sistem operasi Microsoft Windows dengan menggunakan | ||
| + | model pemprograman (COM). | ||
| + | </p> | ||
| + | <p> | ||
| + | Visual Basic merupakan bahasa pemprograman <em>Basic </em>dan menawarkan perkembangan perangkat lunak komputer berbasis grafik dengan cepat. Beberapa | ||
| + | bahasa skrip, seperti Visual Basic for Applications (VBA) dan Visual Basic Scripting Edition (VBScript), sama seperti halnya Visual Basic, tetapi cara | ||
| + | kerjanya yag berbeda. | ||
| + | </p> | ||
| + | <p> | ||
| + | Microsoft Visual Basic .NET adalah sebuah alat untuk mengembangkan dan membangun aplikasi yang bergerak di atas sistem.NET Framework, dengan menggunakan | ||
| + | bahasa Basic. Dengan alat ini, para programer dapat membangun aplikasi Windows Forms, aplikasi web berbasis ASP.NET, dan juga aplikasi Command-line. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.6. Pengenalan PHP <em>(Personal Home Page) </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | PHP <em>(Personal home page) </em>merupakan <em>script </em>untuk pemprograman <em>web server-side, script </em>yang membuat dokumen HTML secara<em>on the flv, </em>dokumen HTML yang dihasilakan dari suatu aplikasi bukan dokumen HTML yang dibuat dengan menggunakan teks <em>editor </em>atau <em>editor </em>HTML. Dengan menggunakan PHP, maintenance suatu situs <em>web </em>menjadi lebih mudah. | ||
| + | </p> | ||
| + | <p> | ||
| + | Proses <em>update </em>data dapat dilakukan dengan menggunakan aplikasi yang dibuat dengan menggunakan <em>script </em>PHP, PHP/FI merupakan nama awal dari | ||
| + | PHP, dibuat pertama kali oleh Rasmus Lerdoff PHP awalnya merupakan program CGI yang dikhususkan untuk menerima <em>input </em>melalui <em>form </em>yang | ||
| + | ditampilkan dalam <em>browser web. Software </em>ini disebarkan dan dilesensikan sebagai perangkat lunak <em>open source.</em>Adapun keunggulan yang | ||
| + | dimiliki oleh PHP adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. <em>Life Cycle </em>yang sangat singkat, sehingga PHP selalu <em>up to date </em>mengikuti perkembangan teknologi internet | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. <em>Cross platform, </em>yakni PHP dapat dipakai di hampir semua<em> webserver</em> yang ada di pasaran (terutama Apache dan Microsoft IIS) dan | ||
| + | dijalankan pada berbagai sistem operasi (Linux, Windows, FreeBSD). | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. PHP mendukung koneksi ke banyak<em> database</em> baik yang gratis maupun komersil, seperti<em> MySQL, mSQL, Oracle,</em><em> </em> <em>Microsoft SQL Server, Interbase</em>, dan banyak lagi. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. PHP bersifat <em>open source </em>dan gratis. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.7. <em>MySQL </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | <em>MySQL</em> | ||
| + | merupakan sebuah <em>software </em>yang berguna sebagai suatu <em>databse server </em>yang cukup terkenal. Seiring dengan <em>user script </em>PHP untuk <em>web porgraming. Database server </em>itu sendiri merupakan suatu <em>software </em>yang bertugas untuk melayani permintaan <em>(request) query </em> | ||
| + | dari <em>client.</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>MySQL</em> | ||
| + | sebagai suatu<em> database server</em> mempunyai beberapa kemampuan, salah satunya harus menyediakan suatu sistem manajemen <em>database</em> yang dapat | ||
| + | mengatur bagaimana menyimpan, menambah, mengakses data dan transaksi-transaksi<em> database</em> lainnya.<em> MySQL</em> cepat sekali berkembang, karena <em> MySQL</em><em> </em>merupakan suatu<em> software</em> yang<em> Open Source</em>. | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>MySQL</em> | ||
| + | adalah<em> Relational Database Management System</em> (RDBMS) yang didistribusikan secara gratis dibawah lisensi GPL (<em>General Public License</em>). | ||
| + | Dimana setiap orang bebas untuk menggunakan<em> MySQL</em>, namun tidak boleh dijadikan produk turunan yang bersifat komersial.<em> MySQL</em> sebenarnya | ||
| + | merupakan turunan salah satu konsep utama dalam<em> database</em><em> </em>sejak lama, yaitu <em>SQL</em><em> </em>(<em>Structured Query Language</em>). <em>SQL</em> adalah sebuah konsep pengoperasian <em>database</em>, terutama untuk pemilihan atau seleksi dan pemasukan data, yang memungkinkan | ||
| + | pengoperasian data dikerjakan dengan mudah secara otomatis. | ||
| + | </p> | ||
| + | <p> | ||
| + | Kendala suatu sistem <em>database </em>(DBMS) dapat diketahui dari cara kerja <em>optimizer </em>dalam melakukan proses perintah-perintah <em>SQL</em>, | ||
| + | yang dibuat oleh <em>user </em>maupun program-program aplikasinya. Sebagai <em>database </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>server, MySQL</em> | ||
| + | dapat dikatakan lebih unggul dibandingkan <em>database server </em>lainnya dalam <em>query </em>data. Hal ini terbukti untuk <em>query </em>yang dilakukan | ||
| + | oleh <em>single user, </em>kecepatan <em>query. MySQL</em> dapat sepuluh kali lebih cepat dari Postgre <em>SQL</em> dan lima kali lebih cepat dibandingkan | ||
| + | Interbase. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.8. Konsep Dasar Metode Penelitian</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Perancangan</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>A. DFD <em>(Data Flow Diagram) </em> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Data Flow Diagram <em>(DFD) </em>merupakan suatu cara atau metode untuk membuat rancangan sebuah sistem yang mana berorientasi pada alur data yang bergerak | ||
| + | pada sebuah sistem pengembangan. Beberapa komponen <em>DFD </em>(Data Flow Diagram) adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. <em>User/Terminator</em>: kesatuan diluar sistem yang memberikan input ke sistem atau menerima output dari sistem berupa orang organisasi, atau sistem | ||
| + | lain. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. <em>Process</em>: Aktifitas yang mengolah input menjadi output | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Data Flow: Aliran data pada sistem | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Data Store: Penyimpanan data pada <em>database</em>, biasanya berupa table. | ||
| + | </p> | ||
| + | <p> | ||
| + | Di dalam <em>DFD </em>terdapat tiga level untuk mencapai sistem yang ada menjadi sistem yang berjalan atau dalam pengembangan, yaitu | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Diagram Konteks | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Diagram Nol (Diagram level-1) | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Diagram Rinci. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Untuk mengetahui bagan-bagan dalam <em>DFD </em>adapun gambar dibawah berikut ini: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Tabel 2.1. Bagan DFD</strong> | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://ammarafsanjani.blogspot.com/2013/11/25-pengertian-data-flow-diagram-dan.html"> | ||
| + | http://ammarafsanjani.blogspot.com/2013/11/25-pengertian-data-flow-diagram-dan.html | ||
| + | </a> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> B.</strong> | ||
| + | <strong>Flowchart </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Dalam membuat suatu program perlu adanya suatu cara untuk menganalisa suatu kasus yang akan dibuatkan program dengan salah satu bahasa pemprograman, salah | ||
| + | satunya dengan Flowchart. Flowchart itu sendiri adalah sekumpulan gambar-gambar tertentu untuk menyatakan alur dari suatu program yang akan diterjemahkan | ||
| + | ke salah satu bahasa pemprograman. | ||
| + | </p> | ||
| + | <p> | ||
| + | Kegunaan flowchart sama seperti halnya algoritma yaitu menuliskan alur program tetapi dalam bentuk gambar atau <em>symbol.</em> Flowchart sendiri terbagi | ||
| + | atas dua bagian yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Flowchart yang menggambarkan alur suatu sistem | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Flowchart yang menggambarkan alur dari suatu program. | ||
| + | </p> | ||
| + | <p> | ||
| + | Sistem flowchart adalah bagan yang memperlihatkan urutan prosedur dan proses dari beberapa file di dalam media tertentu, melalui flowchart ini dapat | ||
| + | terlihat jenis media penyimpanan yang dipakai dalam pengolahan data. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Adapun dalam flowchart dalam menggambarkan alur sistem atau program menggunakan <em>symbol</em> tertentu seperti dibawah ini: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Tabel 2.2. dgfg</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://mane3x.wordpress.com/2013/03/29/konsep-dasar-flowchart-dan-perbedaan-tiap-jenis-flowchart/">http://mane3x.wordpress.com</a> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 2. Pengujian </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> A. White Box</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Sodikin didalam jurnal Teknologi Informasi (2009:750), “Pengujian White Box berfokus pada struktur kontrol pengguna”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>B. Black Box </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Budiman (2012:4), “Pengujian <em>black box </em>merupakan metode perancangan data uji yang didasarkan pada spesifikasi perangkat lunak. Data uji | ||
| + | dibangkitkan, dieksekusi pada perangkat lunak dan kemudian keluaran dari perangkat lunak diuji apakah telah sesuai dengan yang diharapkan”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>3. Flowchart </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Adelia di dalam jurnal Sistem Informasi (2011:116), “<em>Flowchart </em>adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan | ||
| + | prosedur dari suatu program”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Flowchart </em> | ||
| + | dapat mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan dievaluasi lebih lanjut, apabila seorang analis dan programmer | ||
| + | akan membuat <em>flowchart, </em>ada beberapa pertunjuk yang harus diperhatikan sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. <em>flowchart </em>digambarkan dari halaman atas ke bawah dan kiri ke kanan. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dimengerti oleh pembacanya. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Setiap langkah dari aktifitas harus diuraikan dengan menggunakan dekripsi kata kerja. | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Setiap langkah dari aktifitas harus berada pada urutan yang benar. | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati. | ||
| + | </p> | ||
| + | <p> | ||
| + | 7. Gunakan simbol-simbol <em>flowchart </em>yang <em>standart. </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.9. PC <em>(Personal Computer)</em>/Laptop</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi PC</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | Personal Computer <em>(PC) </em>adalah seperangkat komputer yang digunakan oleh satu orang saja/pribadi. Biasanya komputer ini adanya dilingkungan rumah, | ||
| + | kantor, toko, dan dimana saja karena harga PC sudah relativ terjangkau dan banyak macamnya. Adapun beberapa definisi komputer menurut para ahli sebagai | ||
| + | berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Mc Graw Hill, “Komputer adalah mesin penghitung elektronik yang cepat dan dapat menerima informasi input digital, kemudian memprosesnya sesuai | ||
| + | dengan program yang tersimpan di memorinya, dan menghasilkan output berupa informasi. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut V.C. Hamacher et al, “Komputer merupakan mesin penghitung elektronik yang dengan cepat dapat menerima informasi input digital, memprosesnya sesuai | ||
| + | dengan program yang tersimpan di memorinya dan menghasilkan output informasi. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Robert H. Blissmer, “Komputer ialah suatu alat elektronik yang mampu melakukan beberapa tugas seperti menerima input, memproses input, menyimpan | ||
| + | perintah-perintah dan menyediakan output dalam bentuk informasi. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Donald H. Sanderes, “Komputer adalah sistem elektronik untuk memanipulasi data dengan cepat dan tepat serta dirancang dan diorganisasikan agar | ||
| + | secara otomatis menerima menyimpan data input. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut <em>Wikipedia,</em> “Komputer adalah alat yang dipakai untuk mengolah data menurut prosedur yang telah dirumuskan. | ||
| + | </p> | ||
| + | <p> | ||
| + | Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan <em>user </em>(pengguna). | ||
| + | Komputer memiliki tiga elemen yang menjadi satu kesatuan yang tidak terpisahkan, yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. <em>Hardware </em>(Perangkat Keras) | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. <em>Software </em>(Perangkat Lunak) | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. <em>Brainware </em>(Pengguna/<em>user</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | Generasi komputer terbagi menjadi beberapa generasi dari lima generasi yaitu sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Komputer Generasi Pertama (1946-1959): Tabung Vakum | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Komputer Generasi Kedua (1959-1964): Transistor | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Komputer Generasi Ketiga (1964-1970): <em>IC </em>(Integrated Circuit) | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Komputer Generasi Keempat (1979): Mikroprocessor | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Komputer Generasi Kelima LSI <em>(Large scale integration).</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <a name="_GoBack"></a> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.1.10. Konsep Pompa Air <em>(Submersible) </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Pompa Air <em>(Submersible) </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Pompa air <em>(submersible) </em>pompa benam adalah pompa yang dioperasikan di dalam air dan akan mengalami kerusakan, jika dioperasikan dalam keadaan | ||
| + | tidak terdapat air terus-menerus. Jenis pompa ini mempunyai tinggi minimal air yagn dapat dipompa dan harus dipenuhi ketika bekerja agar <em>life time </em>pompa tersebut lama.Pompa jenis ini bertipe pompa sentrifugal.Pompa sentrifugal sendiri prinsip kerjanya mengubah energy kinetis | ||
| + | (kecepatan) cairan menjadi <em>energy</em> potensial (dinamis) melalui suatu impeller yang berputar dalam <em>casing. </em>Di bawah ini adalah gambar | ||
| + | konsep dasar pompa air <em>(submersible) </em>adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.3. …</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2. Teori Khusus </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.1. Konsep Dasar Mikrokontroler</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>1. Definisi Mikrokontroller </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Sumardi (2013:1), “Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang | ||
| + | bias ditulis dan dihapus dengan cara khusus, cara kerja mikrokontoler sebenarnya membaca dan menulis data”. Dari beberapa definisi-definisi diatas dapat | ||
| + | disimpulkan bahwa mikrokontroler adalah sebauh sistem mikroprosesor dalam chip tunggal yang mana didalamnya terdapat <em>CPU, ROM, RAM, I/O, CLOCK </em>dan | ||
| + | peralatan <em>internal </em>lainnya, dan juga mempunyai masukan dan keluaran serta kendali yang di fungsikan untuk membaca data, dan dengan program yang | ||
| + | bisa ditulis dan dihapus dengan cara khusus. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2. </strong> | ||
| + | <strong>Karakteristik Mikrokontroler </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Sumardi (2013:2), mikrokontroler memiliki karakteristik sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Memiliki program khusus yang disimpan dalam memori untuk aplikasi tertentu, tidak seperti PC yang multifungsi karena mudahnya memesukan program. Program | ||
| + | mikrokontroler relative lebih kecil dari pada program-program pada PC. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Konsumsi daya kecil | ||
| + | </p> | ||
| + | <p> | ||
| + | C. Rangkainannya sederhana dan kompak | ||
| + | </p> | ||
| + | <p> | ||
| + | D. Harganya murah, karena komponenya sedikit | ||
| + | </p> | ||
| + | <p> | ||
| + | E. Unit I/O yang sederhana, misalnya LCD, LED, dan LATCH | ||
| + | </p> | ||
| + | <p> | ||
| + | F. Lebih tahan terhadap kondisi lingkungan ekstrim, misalnya <em>temperature, </em>tekanan, kelembapan, dan sebagainya | ||
| + | </p> | ||
| + | <p> | ||
| + | G. Klasifikasi Mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Malik dam Mohammad Unggul Juwana (2009:3),Mikrokontroler memiliki beberapa klasifikasi yaitu, sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. ROM (<em>Flash Memory) </em>dengan kapasitas 1024 byte (1 KB) | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. RAM berkapasitas 68 byte | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. EEPROM (memori data) berkapasitas 64 byte | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Total 13 jalur I/O (Port B 8 bit) | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Timer/Counter 8 bit dengan prescaler | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Fasilitas pemprograman di dalam sistem (ICSP=<em>In Circuit Serial Programing</em>). | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>3. </strong> | ||
| + | <strong>Fitur-fitur Mikrokontroler </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | Menurut Malik dan Mohammad Unggul Juwana (2009:3), ada beberapa fitur yang pada umumnya ada di dalam mikrokontroler adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>A. </strong> | ||
| + | <strong>RAM <em>(Random Access Memory)</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | RAM digunakan oleh mikrokontroler untuk tempat penyimpanan <em>variable. </em>Memori ini bersifat <em>volatile </em>yang artinya akan kehilangan semua | ||
| + | datanya jika tidak mendapatkan catu daya. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>B. </strong> | ||
| + | <strong>ROM <em>(Read Only Memory)</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | ROM disebut juga sebagai kode memori karena berfungsi untuktempat penyimpanan program yang akan diberikan oleh <em>user.</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>C. </strong> | ||
| + | <strong>Register </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Register merupakan tempat penyimpanan nilai-nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>D. </strong> | ||
| + | <strong>Special Function Register </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Merupakan register khusus yang berfungsi untuk mengaru jalanya mikrokontroler dan register ini terletak di RAM. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>E. </strong> | ||
| + | <strong><em>Input </em></strong> | ||
| + | <strong>dan <em>output Pin </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Pin Input </em> | ||
| + | adalah bagian yang berfungsi sebagai penerima <em>signal </em>dari luar dan pin ini dihubungkan ke berbagai media <em>inpu</em>tan seperti <em>keypad, sensor, keyboard, </em>dan sebagainya. <em>Pin Output </em>adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma | ||
| + | mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>F. </strong> | ||
| + | <strong><em>Interrupt</em></strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Interrupt </em> | ||
| + | merupakan bagian dari mikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program sedang dijalankan, program | ||
| + | interupsi terlebih dahulu. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Malik dan Mohammad Unggul Junawa (2009:3), ada beberapa <em>interrupt </em>yang terdapat pada mikrokontroler adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em>1. </em></strong> | ||
| + | <strong><em>Interrupt Eksternal </em></strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Interrupt </em> | ||
| + | ini akan terjadi ketika ada inputan dari <em>pin interrupt. </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em>2. </em></strong> | ||
| + | <strong><em>Interrupt Timer </em></strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Interrupt </em> | ||
| + | ini akan terjadi ketika waktu tertentu telah tercapai. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em>3. </em></strong> | ||
| + | <strong><em>Interrupt Serial </em></strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>Interrupt </em> | ||
| + | ini akan terjadi ketika ada penerimaan data dari komunikasi serial. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.2. Mikrokontroler ATmega 32u4 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>1. Arsitektur Mikrokontroler ATmega 32u4 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sebagai salah satu vendor<em> </em>besar didunia ini, ATMEL mengeluarkan AT mega 32u4 yang merupakan salah satu mikrokontroler yang banyak digunakan. Mikro | ||
| + | AT mega 32u4 memiliki kompabilitas penuh dengan keluarga MCS-51 lain, terutama pada bagian pemprogramannya dan mampu deprogram secara <em>In System Programing </em>(ISP). | ||
| + | </p> | ||
| + | <p> | ||
| + | Mikrokontroler ATmega 32u4 memiliki beberapa kriteria <em>standard </em>yaitu memiliki 32 KB <em>Flash Memory </em>1 KB EEPROM yang dapat di program ulang | ||
| + | sekitar 1000 kali <em>write </em>atau <em>erase cycle, </em>2,5 KB SRAM, 26 jalur I/O, <em>analog comparator, </em>dua buah 8 bit <em>timer/counter, </em> | ||
| + | dengan arsitektur lima <em>vector, </em>empat level<em> interrupt, full duplex serial port, cystal oscillator </em>dan <em>cystal timer/counter. </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | Mikrokontroler ATmega 32u4 beroprasi pada frekuensi <em>clock </em>sampai 8 Mhz. ATmega 32u4 memiliki dua <em>power saving mode </em>yang dapat dikontrol | ||
| + | melalui <em>software, </em>yaitu <em>idle mode </em>dan <em>power down mode. </em>Pada <em>idle mode, </em>CPU tidak aktif sedangkan isi RAM tetap | ||
| + | dipertahankan dengan <em>timer/counter, serial port, </em>dan <em>interrupt system </em>tetap berfungsi. Pada <em>power down mode, </em>isi RAM akan | ||
| + | disimpan tetapi osilatornya tidak akan berfungsi sehingga semua fungsi dari <em>chip </em>akan berhenti sampai mendapat <em>reset </em>secara <em>hardware</em>. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2. </strong> | ||
| + | <strong>Konfigurasi Pin ATmega 32u4 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | Mikrokontroler merupakan sebuah processor yang digunakan untuk kepentingan control. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer | ||
| + | pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Seperti umumya komputer, mikrokontroler adalah alat yang | ||
| + | mengerjakan instruksi-instruksi yang diberikan kepadanya, artinya bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri | ||
| + | yang dibuat oleh seorang <em>programmer.</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Program ini mengintruksikan komputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh <em>programmer </em>konfigurasi pin ATmega 32u4 dapat | ||
| + | dilihat pada gambar berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.4. Konfigurasi <em>pin </em>AT mega32u4 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://datasheetdir.com"><strong>http://datasheetdir.com</strong></a> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>3. </strong> | ||
| + | <strong>Fitur Mikrokontroler ATmega32u4</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | ATmega 32u4 adalah mikrokontroler keluaran dari ATMEL yang mempunyai arsitektur RISC ( <em>Reduce Instruction Set Computer</em>) yang dimana setiap proses | ||
| + | eksekusi data lebih cepat dari pada arsitektur CISC (<em>Completed Instruction Set Computer). </em>Mikrokontroler ini memiliki beberapa fitur antara lain: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Dimensi 6,1 cm(p), 5,75 cm(l), 1,8 cm(t) | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Memiliki SRAM internal 2,5 KB | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. 1 kanal USART, SPI, 12C, JTAG, USB <em>device </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Bekerja pada level tegangan 3,3VDC-5,5VDC | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Catu daya dapat melalui <em>bus power(usb) </em>ataupun dari catu daya eksternal 5VDC | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Terintegrasi <em>cystal ocilator </em>dengan frekuensi 8Mhz | ||
| + | </p> | ||
| + | <p> | ||
| + | 7. Pemprograman dapat melalui ISP <em>port </em>ataupun <em>mini usb port </em>(bootlaoder) | ||
| + | </p> | ||
| + | <p> | ||
| + | 8. 32 KB <em>flash memory.</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Untuk mengetahui alur hubungan dari <em>architecture </em>ATmega 32u4 dapat dilihat pada gambar berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2</strong> | ||
| + | <strong>.5.</strong> | ||
| + | <strong> Arsitektur ATmega328</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> (</strong> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://duinoworks.bakketti.com/"><strong>http://duinoworks.bakketti.com/</strong></a> | ||
| + | <strong>) </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.3. Konsep Dasar Sensor Kelembapan (<em>Humidity)</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Kelembapan adalah salah satu faktor yang menetukan kondisi cuaca pada suatu daerah. Kelembapan sendiri dapat diukur dengan berbagai macam metode, salah | ||
| + | satunya adalah dengan menggunakan sensor kelembapan (<em>humidity).</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Jenis kelembapan ada dua faktor yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Kelembapan Absolut | ||
| + | </p> | ||
| + | <p> | ||
| + | Bilangan yang menunjukan berapa gram uap air yang tergantung dalam satu meter kubik udara | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Kelembapan relative | ||
| + | </p> | ||
| + | <p> | ||
| + | Bilangan yang menunjukan berapa persen perbandingan antara uap air yang ada dalam udara saat pengukuran dan jumlah uap air maksimum yang dapat ditampung | ||
| + | oleh udara tersebut. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Jenis kelembapan sensor terdiri dari beberapa bagian sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Capacitive Sensors | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Sebuah kapasitor air-filled/terisi-udara dibuat sebagai suatu sensor kelembaban relative karena uap dalam atmosfer merubah permivitas elektrik udara. | ||
| + | Sebuah kapasitor air-filled/terisi-udara dibuat sebagai suatu sensor kelembaban relative karena uap dalam atmosfer merubah permivitas elektrik udara. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Gambar 2.6. Konfigurasi Capacitive sensors</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Electrical Conductivity Sensors | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Sensor kelambapan konduktivitas adalah disebut dengan “<em>Pope element”, </em>yang terdiri dari polystyrene yang | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Gambar 2.7. Konfigurasi Electrical Conductivity Sensors</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | dilakukan/diperlakukan dengan asam sulfur untuk memperoleh karakteristik surface-resistivitas yang diinginkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Thermal Conductivity Sensors | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Penggunaan konduktivitas thermal dari gas untuk mengukur kelembapan dapat diukur oleh sebuah sensor thermistor. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Gambar 2.8. Konfigurasi Thermal conductivity sensors</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.4. Arduino Uno Board 1.0</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Arduino dikatakan sebagai sebuah <em>platform </em>dari <em>physical computing </em>yang bersifat <em>open source. </em>Pertama yang perlu dipahami bahwa | ||
| + | kata “<em>platform”</em> ini adalah sebuah pilihan kata yang tepat. Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi kombinasi dari <em>hardware</em>, bahasa pemprograman dan <em>Integrated Development Environment </em>(IDE) yang berteknologi. IDE adalah sebuah software yang sangat | ||
| + | berperan untuk menulis program, <em>compile </em>menjadi kode biner dan meng<em>-upload </em>kedalam <em>memory </em>mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Feri Djunandi (2011:8), “Komponen utama didalam papan Arduino adalah sebuah mikrokontroler 8 bit dengan merk ATmega yang dibuat oleh Atmel | ||
| + | Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega | ||
| + | 328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega 2560”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dibawah ini adalah contoh diagram blok sederhana dari mikrokontroler ATmega 32u4 yang dipakai pada Arduino Uno sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | UART (Anar Muka Serial) | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 2KB RAM 32 KB RAM | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | Flash Memori | ||
| + | </p> | ||
| + | <p> | ||
| + | (Program) | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | (Memori kerja) | ||
| + | </p> | ||
| + | <p> | ||
| + | 1KB | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | EEPROM | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | CPU | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | Port Input / Output | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.9. </strong> | ||
| + | Diagram Blok Arduino Uno | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber : E-Book Pengenalan Arduino Feri Djuandi (2011:8)</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Blok-blok diagram dari pengenalan Arduino Uno 1.0 dijelaskan sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. <em>Universal Asychronus Reseirve/Transmiter </em>(UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-442, dan | ||
| + | RS-485. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. 2KB RAM pada memori kerja bersifat <em>volatile</em> (hilang saat daya dimatikan), digunakan oleh variable-variabel didalam program. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. 32KB RAM flash memori bersifat <em>non-volatile, </em>digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memori juga | ||
| + | menyimpan <em>bootlander. Bootlander </em>adalah program inisiasi yang ukurnanya kecil, dijalankan oleh CPU saat dayanya hidup. Setelah <em>bootlander </em>selesai dijalankan, berikutnya program didalam RAM akan dieksekusi. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. 1KB EEPROM bersifat <em>non-volatile </em>, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papa | ||
| + | Arduino Uno 1.0. | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. <em>Central Processing Unit (CPU), </em>bagian mikrokontroler untuk menjalankan setiap instruksi dari program. | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Port Input dan Output, pin-pin untuk menerima data <em>(input) </em>digital atau analog, dan mengeluarkan data <em>(output) </em>digital atau analog. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.5. Bagian-Bagian Arduino Uno 1.0 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Setelah mengenal bagian-bagian utama dari mikrokontroler ATmega 32u4 sebagai komponen utama, selanjutnya menjelaskan tentang bagian-bagian dari papan | ||
| + | Arduino itu sendiri. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.10. Bagian-bagian Arduino Uno <em>Board </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: E-Book Pnegenalan Arduino Feri Djuandi (2009:9) </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Bagian-bagian komponen dari Arduino Uno <em>board </em>dapat dijelaskan sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. <strong>14 pin input/output digital (0-13)</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Berfungsi sebagai input atau output, dapat diatur oleh program. Khusus untuk 6 buah pin 3, 5, 6, 9, 10, dan 11, dapat juga berfungsi sebagai pin analog | ||
| + | output dimana tegangan outputnya dapat diatur. Nilai sebuah pin output analog dapat deprogram antara 0-255, dimana hal itu mewakili nilai tegangan 0-5 V. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. <strong>USB </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Berfungsi untuk: | ||
| + | </p> | ||
| + | <p> | ||
| + | § Memuat program dari komputer ke dalam papan. | ||
| + | </p> | ||
| + | <p> | ||
| + | § Komunikasi serial antara papan dan komputer. | ||
| + | </p> | ||
| + | <p> | ||
| + | § Mmeberi daya listrik ke papan. | ||
| + | </p> | ||
| + | <p> | ||
| + | C. <strong>Sambungan SV1 B</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Sambungan atau <em>jumper </em>untuk memilih sumber daya papan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan lagi pada | ||
| + | papan Arduino versi terakhir karena pemilihan sumber daya eksternal atau USB dilakukan secara otomatis. | ||
| + | </p> | ||
| + | <p> | ||
| + | D. <strong>Q1-Kristal <em>(Quartz crystal oscillator) </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Jika mikrokontroler dianggap sebagai sebuah otak, maka Kristal adalah janttungnya karena komponen ini menghasilkan detak-detak yang dikirim kepada | ||
| + | mikrokontroler agar melakukan sebuah operasi untuk setiap detaknya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16 MHz). | ||
| + | </p> | ||
| + | <p> | ||
| + | E. <strong>Tombol Reset S1 </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Untuk menreset mikrokontroler sehingga program akan mulai lagi dari awal. Perhatikan bahwa tombol reset ini bukan untuk menghapus program atau mengosongkan | ||
| + | mikrokontroler. | ||
| + | </p> | ||
| + | <p> | ||
| + | F. <strong>IC 1-Mikkontroler ATmega </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Komponen utama dari papan Arduino, didalamnya terdapat CPU, ROM dan RAM. | ||
| + | </p> | ||
| + | <p> | ||
| + | G. <strong>X1-Sumber Daya Eksternal </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Jika hendak disuplai dengan sumber daya eksternal, Arduino dapat diberikan tegangan DC antara 9-12 V. | ||
| + | </p> | ||
| + | <p> | ||
| + | H. <strong>6 pin input analog (0-5)</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Pin ini sangat berguna untuk membaca tegangan yang dihasilakn oleh sensor analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input antara | ||
| + | 0-1-23, dimana hal itu mewakili nilai tagangan 0-5V. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.6. Komponen Dasar Elektronika</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Elektronika </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Rusmadi (2009:10), Komponen elektronika terbagi menjadi 2 bagian yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Komponen Pasif | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Rusmadi (2009:10), “Komponen pasif adalah komponen-komponen elektronika yang apabila dialiri aliran listrik tidak menghasilkan tenaga seperti: | ||
| + | perubahan tegangan, pembalikan fasa, penguatan dan lain-lain”. Ada beberapa komponen yang termasuk dalam komponen pasif diantaranya adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Resistor atau Tahanan | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Kapasitor atau Kondensator | ||
| + | </p> | ||
| + | <p> | ||
| + | C. Trafo atau Transformator | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Komponen Aktif | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Rusmadi (2009:33), Komponen aktif adalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatu tenaga baik berbentuk penguatan | ||
| + | maupun mengatur aliran listrik yang melaluinya”. | ||
| + | </p> | ||
| + | <p> | ||
| + | Ada beberapa yang termasuk komponen aktif antara lain adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Dioda | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Transistor | ||
| + | </p> | ||
| + | <p> | ||
| + | C. IC <em>(Integrated Circuit) </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | D. Thyristor atau SCR <em>(Silicon Controller Reciefer). </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.7. Konsep Dasar Driver Motor DC IC L293D </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Driver Motor DC IC L293D</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <em>IC</em> | ||
| + | L293D adalah <em>IC </em>yang didesain khusus sebagai <em>driver </em>motor <em>DC </em>dan dapat dikendalikan dengan rangkaian <em>TTL </em>mupun | ||
| + | mikrokontroler motor DC yang dikontrol dengan <em>driver </em>IC L293D dapat dihubungkan ke <em>ground </em>maupun ke sumber tegangan positif karena | ||
| + | didalam <em>driver </em>L293D sistem <em>driver </em>yang digunakan adalah <em>totem pool.</em> Dalam 1 <em>unit chip </em>IC L293D terdiri dari 4 buah <em>driver </em>motor DC yang berdiri sendiri denagn kemampuan mengalirkan arus 1 <em>ampere </em>tiap <em>driver</em>. Sehingga dapat digunakan untuk | ||
| + | membuat <em>driver h-bridge </em>untuk 2 buah motor DC. Konstruksi <em>pin driver </em>motor DC IC L293D dapat dilihat pada gambar 2.5 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Gambar 2.11. </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Konstruksi <em>pin </em>dan rangkaian <em>driver </em>motor DC IC L293D</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> (Sumber: http//chaokhun.kmitl.ac.th) </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Fungsi <em>pin driver </em>motor DC IC L293D, terdiri dari beberapa pin yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. <em>Pin </em><strong>EN </strong>(<em>Enabl, </em>EN1.2, EN3.4) berfungsi untuk mengijinkan <em>driver </em>menerima perintah untuk mengerkan motor DC. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. <em>Pin <strong>In (</strong>Input, </em>1A, 2A, 3A, 4A) adalah <em>pin input </em>sinyal kendali motor DC | ||
| + | </p> | ||
| + | <p> | ||
| + | C. <em>Pin <strong>Out (</strong>Output, </em>1Y, 2Y, 3Y, 4Y) adalah jalur <em>output </em>masing-masing <em>driver </em>yang dihubungkan ke motor DC. | ||
| + | </p> | ||
| + | <p> | ||
| + | D. <em>Pin <strong>VCC (</strong>VCC1, VCC2) </em>adalah jalur input tegangan sumber <em>driver </em>motor DC, dimana <em>VCC1 </em>adalah jalur input | ||
| + | sumber tegangan rangkaian control <em>driver </em>dan VCC2 adalah jalur <em>input </em>sumber tegangan untuk motor DC yang dikendalikan. | ||
| + | </p> | ||
| + | <p> | ||
| + | E. <em>Pin <strong>GND (</strong>Ground) </em>adalah jalu yang harus dihubungkan ke <em>ground, pin GND</em> ini ada 4 buah yang berdekatan dan dapt | ||
| + | dihubungkan ke sebuah pendingin kecil. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.</strong> | ||
| + | <strong>2</strong> | ||
| + | <strong>.</strong> | ||
| + | <strong>8</strong> | ||
| + | <strong>.</strong> | ||
| + | <strong> Konsep Dasar </strong> | ||
| + | <strong>Motor Servo </strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Motor Servo </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem <em>closed feedback</em> yang terintegrasi dalam motor tersebut. Pada | ||
| + | motor servo posisi putaran sumbu (<em>axis</em>) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar </strong> | ||
| + | <strong>2</strong> | ||
| + | <strong>.</strong> | ||
| + | <strong>12</strong> | ||
| + | <strong>. Bentuk fisik motor servo standar</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | <strong>Sumber:</strong> | ||
| + | <a href="http://elektronika-dasar.web.id"><strong>http://elektronika-dasar.web.id</strong></a> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Motor servo disusun dari sebuah motor DC, <em>gearbox</em>, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk | ||
| + | menentukan batas maksimum putaran sumbu (<em>axis</em>) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin | ||
| + | kontrol motor servo. | ||
| + | </p> | ||
| + | <p> | ||
| + | Motor servo adalah motor yang mampu bekerja dua arah (<em>CW</em> dan <em>CCW</em>) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan | ||
| + | memberikan variasi lebar pulsa (<em>duty cycle</em>) sinyal <em>PWM </em>padabagianpinkontrolnya. | ||
| + | <br/> | ||
| + | <strong>1. Jenis motor servo</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Motor servo standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (<em>CW</em> dan <em>CCW</em>) dengan defleksi masing-masing sudut mencapai | ||
| + | 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Motor servo<em> continuous</em> Motor servo jenis ini mampu bergerak dua arah (<em>CW</em>dan <em>CCW</em>) tanpa batasan defleksi sudut putar (dapat | ||
| + | berputar secara kontinyu). <em>Pulse</em> kontrol motor servo operasional motor servo dikendalikan oleh sebuah <em>pulse</em> selebar ± 20 ms, dimana lebar <em>pulse</em> antara 0.5 <em>ms</em> dan 2 <em>ms</em> menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan <em>pulse</em> dengan | ||
| + | besar 1.5 <em>ms</em> mencapai gerakan 90°, maka bila kita berikan <em>pulse</em> kurang dari 1.5 <em>ms</em> maka posisi mendekati 0° dan bila kita | ||
| + | berikan <em>pulse</em> lebih dari 1.5 <em>ms</em> maka posisi mendekati 180°. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Gambar <em>pulse </em>kendali motor servo dapat dilihat pada gambar 2.2 sebagaiberikut: | ||
| + | <br/> | ||
| + | <br/> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.13. </strong> | ||
| + | <strong>Pulsa kendali motor servo</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | <strong> Sumber: </strong> | ||
| + | http://trikueni-desainsistem.blogspot.com/2014/03/Pengertian-Motor-Servo.html<strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Motor servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal <em>PWM</em> dengan frekuensi 50 <em>Hz</em>. Dimana pada saat sinyal | ||
| + | dengan frekuensi 50<em> Hz</em> tersebut dicapai pada kondisi <em>Tonduty cycle </em>1.5 <em>ms</em>, maka rotor dari motor akan berhenti tepat di | ||
| + | tengah-tengah (sudut 0°/ netral). Pada saat <em>Ton duty cycle</em> dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan | ||
| + | arah jarum jam (<em>Counter Clock wise, CCW</em>) dengan membentuk sudut yang besarnya linier terhadap besarnya <em>Ton duty cycle</em>, dan akan bertahan | ||
| + | diposisi tersebut. Dan sebaliknya, jika <em>Ton duty cycle</em> dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam ( <em>Clock Wise, CW</em>) dengan membentuk sudut yang linier pula terhadap besarnya <em>Ton duty cycle</em>, dan bertahan diposisi tersebut. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.9. Konsep Dasar </strong> | ||
| + | <strong>Lampu <em>led</em></strong> | ||
| + | <strong><em></em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | <strong>1. Definisi Lampu <em>led </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Lampu <em>LED </em>atau kepanjangannya (<em>light emitting diode) </em>adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki | ||
| + | fungsi untuk menunjukkan status dari perangkat elektronika tersebut. Misalnya pada sebuah komputer, terdapat lampu LED power dan <em>led</em> indikator | ||
| + | untuk processor, atau dalam monitor terdapat juga lampu <em>ledpower</em> dan <em>power saving</em>. Lampu <em>led</em> terbuat dari plastik dan dioda | ||
| + | semikonduktor yang dapat menyala apabila dialiri tegangan listrik rendah (sekitar 1.5 volt DC). Bermacam-macam warna dan bentuk dari lampu <em>led</em>, | ||
| + | disesuaikan dengan kebutuhan dan fungsinya. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Bentuk fisik dari lampu <em>led</em> dapat dilihat pada gambar 2.12 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar </strong> | ||
| + | <strong>2</strong> | ||
| + | <strong>.</strong> | ||
| + | <strong>14</strong> | ||
| + | <strong>. Lampu <em>led</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber : diambil dari spedaontel.wordpress.com</strong> | ||
| + | <strong> </strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>A. </strong> | ||
| + | <strong>Fungsi lampu <em>led</em></strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <a href="http://usmanft.blogspot.com/2006/05/led-sebagai-sumber-cahaya-masa-depan.html" target="_blank"><em>Led (light emitting diode)</em></a> | ||
| + | merupakan sejenis lampu yang akhir-akhir ini muncul dalam kehidupan kita. <em>Led</em> dulu umumnya digunakan pada <em>gadget</em> seperti ponsel serta | ||
| + | komputer. Sebagai pesaing lampu bohlam dan neon, saat ini aplikasinya mulai meluas dan bahkan bisa kita temukan pada korek api yang kita gunakan, lampu<em>emergency</em> dan sebagainya. <em>Led</em> sebagai model lampu masa depan dianggap dapat <a href="http://netsains.com/2008/02/menekan-pemanasan-global-dengan-lampu-led/" target="_blank">menekan pemanasan global</a> karena efisiensinya. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.10. Konsep Dasar </strong> | ||
| + | <strong>Resistor</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Resistor </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Resistor atau tahanan adalah salah satu komponen elektronika yang berfungsi untuk mengatur serta menghambat arus listrik. Resistor adalah komponen dasar | ||
| + | elektronika yang dipergunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Sesuai dengan namanya resistor bersifat<em> resistif</em> | ||
| + | dan biasanya komponen ini terbuat dari bahan karbon. Berdasarkan hokum <em>Ohm</em> bahwa <em>resistansi</em> berbanding terbalik dengan jumlah arus yang | ||
| + | mengalir melaluinya. Satuan <em>resistansi</em> dari suatu resistor disebut <em>Ohm</em> atau dilambangkan dengan simbol <strong>W</strong>(<em>Omega</em> | ||
| + | ). | ||
| + | </p> | ||
| + | <p> | ||
| + | Untuk menghitung hambatan pada resistor dapat menggunakan rumus sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | Keterangan : | ||
| + | </p> | ||
| + | <p> | ||
| + | V = tegangan listrik (<em>volt </em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | I = arus yang mengalir (<em>ampere</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | R = tahanan <em>(ohm</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Untuk mengetahui nilai resistor berdasarkan warnanya dapat dilihat pada table 2.1 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Tabel 2.3. Tabel baca resistor </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> Sumber : Rusmadi (2009:13)</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Penjelasan dari kode warna resistor pada gambar 2.13 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | · Kode I, menyatakan angka ke satu | ||
| + | </p> | ||
| + | <p> | ||
| + | · Kode II, menyatakan angka ke dua | ||
| + | </p> | ||
| + | <p> | ||
| + | · Kode III, menyatakan faktor pengali | ||
| + | </p> | ||
| + | <p> | ||
| + | · Kode IV, menyatakan nilai toleransi atau batas antara nilai tahanan terbesar dengan nilai tahanan yang terkecil. | ||
| + | </p> | ||
| + | <p> | ||
| + | Misalkan diketahui warna tahanan terdiri dari merah-hijau-orange-emas, berarti nilai resistansinya = 25.000 ohm ±5% = 25 K ohm ±5%. | ||
| + | </p> | ||
| + | <p> | ||
| + | Nilai maksimal dari resistansinya = 25.000 + (25.000 X 5%) = 26.250 ohm. | ||
| + | </p> | ||
| + | <p> | ||
| + | Nilai maksimal dari resistansinya = 25.000 - (25.000 X 5%) = 26.250 ohm. | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut macamnya resistor terbagi atas dua macam yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Resistor Tetap ( <em>Fixed Resistor</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | Resistor tetap adalah resistor yang memiliki nilai hambatan yang tetap tidak dapat diubah-ubah. Apabila nilai tahanannya semakin besar, maka arus semakin | ||
| + | kecil. Sebaliknya bila nilai tahanannya kecil, maka arus yang mengalir semakin besar. Resistor memiliki batas kemampuan daya misalnya : 1/16 watt, 1/8 | ||
| + | watt, ¼ watt, ½ watt. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Artinya resitor hanya dapat dioperasikan dengan daya maksimal sesuai dengan kemampuan dayanya. Adapun resistor tidak tetap dapat dilihat pada gambar 2.14. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar </strong> | ||
| + | <strong>2</strong> | ||
| + | <strong>.</strong> | ||
| + | <strong>15</strong> | ||
| + | <strong>. Bentuk fisik dan simbol resistor tetap</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Resistor Tidak Tetap (<em>Variable</em> Resistor) | ||
| + | </p> | ||
| + | <p> | ||
| + | Ialah resistor yang nilai hambatannya atau <em>resistansi</em>nya dapat diubah-ubah. Jenisnya antara lain : hambatan geser, trimpot dan potensiometer. Yang | ||
| + | banyak digunakan ialah trimpot dan potensimeter. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>B. </strong> | ||
| + | <strong>Tahanan <em>Variabel</em></strong> | ||
| + | adalah jenis tahanan yang <em>resistansi</em>nya bisa diubah-ubah, seperti Potensiometer dengan cara diputar dan Trimpot (trimer potensiometer). | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>C. </strong> | ||
| + | <strong>LDR (<em>Light Dependent Resistance</em>)</strong> | ||
| + | adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahaya dan membesar apabila tidak terkena | ||
| + | cahaya.<strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>D. </strong> | ||
| + | <strong>NTC (</strong> | ||
| + | <strong><em>negative thermal coeffisien</em></strong> | ||
| + | <strong>)dan PTC (<em>positive thermal coeffisien</em>)</strong> | ||
| + | adalah jenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC pada suhu yang tinggi nilai tahanannya turun dan pada suhu yang rendah | ||
| + | nilai tahananya naik, sedangkan PTC kebalikannya pada suhu yang tinggi nilai tahanannya naik dan pada suhu yang rendah nilai tahanannya turun. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Adapun resistor tidak tetap dapat dilihat seperti pada gambar 2.15 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.16. Bentuk fisik dan simbol resistor tidak tetap</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.11. Konsep Dasar </strong> | ||
| + | <strong>Kapasitor</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definsi Kapasitor </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Kapasitor adalah komponen elektronika yang mempunyai kemampuan menyimpan <em>electron-elektron</em> selama waktu yang tidak tertentu. Kapasitor berbeda | ||
| + | dengan akumulator dalam menyimpan muatan listrik terutama tidak terjadi perubahan kimia pada bahan kapasitor, besarnya kapasitansi dari sebuah kapasitor | ||
| + | dinyatakan dalam <em>farad</em>. | ||
| + | </p> | ||
| + | <p> | ||
| + | Pengertian lain kapasitor adalah komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari 2 buah | ||
| + | plat metal yang dipisahkan oleh suatu bahan <em>dielektrik</em>. Bahan-bahan <em>dielektrik</em> yang umum dikenal misalnya udara vakum, keramik, gelas, <em>elektrolit </em>dan lain-lain. | ||
| + | </p> | ||
| + | <p> | ||
| + | Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (<em>elektroda</em>) metalnya dan pada | ||
| + | saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan | ||
| + | sebaliknya muatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah oleh bahan dielektrik yang <em>non-konduktif</em>. Muatan elektrik ini | ||
| + | “tersimpan” selama tidak ada konduksi pada ujung-ujung kakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuat dengan kapasitansi atau | ||
| + | kapasitas. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Untuk melihat kontruksi dari kapasitor, dapat dilihat pada gambar 2.16 sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar </strong> | ||
| + | <strong>2</strong> | ||
| + | <strong>.1</strong> | ||
| + | <strong>7</strong> | ||
| + | <strong>. Susunan lapisan kapasitor</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://elektronika-dasar.web.id"><strong>http://elektronika-dasar.web.id</strong></a> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Kapasitansi didefenisikan sebagai kemampuan dari suatu kapasitor untuk dapat menampung muatan <em>elektron</em>. <em>Coulombs</em> pada abad 18 menghitung | ||
| + | bahwa 1 <em>coulomb </em>= 6.25 x 1018 elektron. Kemudian Michael Faraday membuat <em>postulat</em> bahwa sebuah kapasitor akan memiliki kapasitansi | ||
| + | sebesar 1 <em>farad</em> jika dengan tegangan 1 <em>volt</em> dapat memuat muatan <em>elektron</em> sebanyak 1 <em>coulombs</em>. Dengan rumus dapat | ||
| + | ditulis : | ||
| + | </p> | ||
| + | <p> | ||
| + | Q = CV | ||
| + | </p> | ||
| + | <p> | ||
| + | Dimana : | ||
| + | </p> | ||
| + | <p> | ||
| + | Q = muatan elektron dalam C (<em>coulomb</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | C = nilai kapasitansi dalam F (<em>farad</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | V = besar tegangan dalam V (<em>volt</em>) | ||
| + | </p> | ||
| + | <p> | ||
| + | Dalam praktek pembuatan kapasitor, kapasitansi dihitung dengan mengetahui luas area plat metal (A), jarak (t) antara kedua plat metal (tebal <em>dielektrik</em>) dan konstanta (k) bahan dielektrik. Dengan rumusan dapat ditulis sebagai berikut : | ||
| + | </p> | ||
| + | <p> | ||
| + | C = (8.85 x 10-12) (k A/t) | ||
| + | </p> | ||
| + | <p> | ||
| + | Contoh konstanta (k) dari beberapa bahan <em>dielektrik </em>yang disederhanakan dapat dilihat pada tabel 2.2 sebagai berikut: | ||
| + | </p> | ||
| + | <table align="left" border="1" cellpadding="0" cellspacing="0"> | ||
| + | <tbody> | ||
| + | <tr> | ||
| + | <td valign="top" width="233"> | ||
| + | <p> | ||
| + | Udara vakum | ||
| + | </p> | ||
| + | </td> | ||
| + | <td valign="top" width="220"> | ||
| + | <p> | ||
| + | K=1 | ||
| + | </p> | ||
| + | </td> | ||
| + | </tr> | ||
| + | <tr> | ||
| + | <td valign="top" width="233"> | ||
| + | <p> | ||
| + | Aluminium | ||
| + | </p> | ||
| + | </td> | ||
| + | <td valign="top" width="220"> | ||
| + | <p> | ||
| + | K=8 | ||
| + | </p> | ||
| + | </td> | ||
| + | </tr> | ||
| + | <tr> | ||
| + | <td valign="top" width="233"> | ||
| + | <p> | ||
| + | Keramik | ||
| + | </p> | ||
| + | </td> | ||
| + | <td valign="top" width="220"> | ||
| + | <p> | ||
| + | K=100-1000 | ||
| + | </p> | ||
| + | </td> | ||
| + | </tr> | ||
| + | <tr> | ||
| + | <td valign="top" width="233"> | ||
| + | <p> | ||
| + | Gelas | ||
| + | </p> | ||
| + | </td> | ||
| + | <td valign="top" width="220"> | ||
| + | <p> | ||
| + | K=8 | ||
| + | </p> | ||
| + | </td> | ||
| + | </tr> | ||
| + | <tr> | ||
| + | <td valign="top" width="233"> | ||
| + | <p> | ||
| + | Polyethylene | ||
| + | </p> | ||
| + | </td> | ||
| + | <td valign="top" width="220"> | ||
| + | <p> | ||
| + | K=3 | ||
| + | </p> | ||
| + | </td> | ||
| + | </tr> | ||
| + | </tbody> | ||
| + | </table> | ||
| + | <p> | ||
| + | <strong>Tabel 2.4. Bahan dielektrik yang di sederhanakan</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>a. </strong> | ||
| + | <strong> Prinsip Pembentukan Kapasitor</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Jika dua buah plat atau lebih yang berhadapan dan dibatasi oleh isolasi, kemudian plat tersebut dialiri listrik maka akan terbentuk kondensator (isolasi | ||
| + | yang menjadi batas kedua plat tersebut dinamakan <em>dielektrikum</em>). | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Bahan <em>dielektrikum</em> yang digunakan berbeda-beda sehingga penamaan kapasitor berdasarkan bahan <em>dielektrikum</em>. Luas plat yang berhadapan | ||
| + | bahan <em>dielektrikum </em>dan jarak kedua plat mempengaruhi nilai kapasitansinya. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Pada suatu rangkaian yang tidak terjadi kapasitor liar. Sifat yang demikian itu disebutkan kapasitansi <em>parasitic</em>. Penyebabnya adalah adanya | ||
| + | komponen-komponen yang berdekatan pada jalur penghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.18. Lapisan dalam kapasitor</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber: </strong> | ||
| + | <a href="http://elektronika-dasar.web.id"><strong>http://elektronika-dasar.web.id</strong></a> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Gambar 2.17 diatas menunjukan bahwa ada dua buah plat yang dibatasi udara. Jarak kedua plat dinyatakan sebagai d dan tegangan listrik yang masuk. Besaran <em>Kapasitansi</em> Kapasitas dari sebuah kapasitor adalah perbandingan antara banyaknya muatan listrik dengan tegangan kapasitor dapat ditulis | ||
| + | menggunakan rumus sebagai berikut: C = Q / V. | ||
| + | </p> | ||
| + | <p> | ||
| + | Jika dihitung dengan rumus C= 0,0885 D/d. Maka kapasitasnya dalam satuan <em>piko farad</em>. D = luas bidang plat yang saling berhadapan dan saling | ||
| + | mempengaruhi dalam satuan cm2. D=jarak antara plat dalam satuan cm. Bila tegangan antara plat 1 <em>volt</em> dan besarnya muatan listrik pada plat 1 | ||
| + | coulomb, maka kemampuan menyimpan listriknya disebut 1 <em>farad</em>. Dalam kenyataannya kapasitor dibuat dengan satuan dibawah 1 <em>farad</em>. | ||
| + | Kebanyakan kapasitor <em>elektrolit</em> dibuat mulai dari 1 <em>mikrofarad</em> sampai beberapa <em>milifarad</em>. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>b. </strong> | ||
| + | <strong>Jenis-jenis kapasitor sesuai bahan dan konstruksinya.</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Kapasitor seperti juga resistor nilai kapasitansinya ada yang dibuat tetap dan ada yang variabel. Kapasitor <em>dielektrikum</em> udara, kapasitansinya | ||
| + | berubah dari nilai maksimum ke minimum. Kapasitor <em>variabel</em> sering kita jumpai pada rangkaian pesawat penerima radio dibagian penala dan osilator. | ||
| + | Agar perubahan kapasitansi di dua bagian tersebut serempak maka digunakan kapasitor variabel ganda. Kapasitor variabel ganda adalah dua buah kapasitor <em>variabel</em> dengan satu pemutar. Berdasarkan <em>dielektrikum</em> kapasitor dibagi menjadi beberapa jenis, antara lain: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. kapasitor keramik | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. kapasitor film kapasitor <em>elektrolit </em> | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. kapasitor<em>tantalum</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. kapasitor kertas | ||
| + | </p> | ||
| + | <p> | ||
| + | Berdasarkan polaritas kutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu : | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Kapasitor <em>Non-Polar</em>, kapasitor yang tidak memiliki polaritas pada kedua elektroda dan tidak perlu dibedakan kaki elektrodanya dalam pesangannya | ||
| + | pada rangkaian elektronika. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Kapasitor <em>Bi-Polar</em>, yaitu kapasitor yang memiliki polaritas positif dan negatif pada elektrodanya, sehingga perlu diperhatikan pesangannya pada | ||
| + | rangkaian elektronika dan tidak boleh terbalik. Kapasitor elektrolit dan kapasitor tantalum adalah kapasitor yang mempunyai kutub atau polar, sering | ||
| + | disebut juga dengan nama kapasitor polar. Kapasitor film terdiri dari beberapa jenis yaitu <em>polyester film</em>, <em>poly propylene film</em>. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.12. Konsep Dasar IC Regulator</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi IC Regulator </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | Salah satu tipe <em>regulator</em> tegangan tetap adalah 78XX. <em>Regulator </em>tegangan tipe 78XX adalah salah satu regulator tegangan tetap dengan tiga | ||
| + | terminal, yaitu terminal <em>VIN</em>, <em>GND</em> dan <em>VOUT</em>. Tegangan keluaran dari <em>regulator</em> 78XX memungkinkan <em>regulator</em> untuk | ||
| + | dipakai dalam sistem logika, <em>instrumentasi</em> dan<em> Hifi</em>. <em>Regulator</em> tegangan 78XX dirancang sebagai <em>regulator</em> tegangan | ||
| + | tetap, meskipun demikian dapat juga keluaran dari <em>regulator</em> ini diatur tegangan dan arusnya melalui tambahan komponen <em>eksternal</em>. Pada | ||
| + | umumnya catu daya selalu dilengkapi dengan <em>regulator</em> tegangan. Tujuan pemasangan <em>regulator</em> tegangan pada catu daya adalah untuk | ||
| + | menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada <em>catu daya</em>. Fungsi lain dari <em>regulator </em>tegangan adalah | ||
| + | untuk perlindungan dari terjadinya hubung singkat pada beban. | ||
| + | </p> | ||
| + | <p> | ||
| + | Untuk melihat karakteristik regulator tegangan positif 78xx dapat dilihatpadatabel2.3sebagaiberikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <br clear="ALL"/> | ||
| + | <p> | ||
| + | <strong>Tabel 2.</strong> | ||
| + | <strong>5</strong> | ||
| + | <strong>. Karakteristik IC <em>regulator </em>tegangan positif 78xx</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber:http://elektronika-dasar.web.id</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Angka xx pada bagian terakhir penulisan tipe <em>regulator</em> 78xx merupakan besarnya tegangan <em>output</em> dari <em>regulator</em> tersebut. Kemudian | ||
| + | huruh L, M merupakan besarnya arus maksimum yang dapat dialirkan pada terminal <em>outputregulator</em> tegangan positif tersebut. Untuk penulisan tanpa | ||
| + | huruf L ataupun M (78(L/M)xx) pada <em>regulator</em> tegangan positif 78xx maka arus maksimal yang dapat dialirkan pada terminal <em>output</em>nya adalah | ||
| + | 1 <em>ampere</em>. Karakteristik dan tipe-tipe kemampuan arus maksimal <em>output</em> dari <em>regulator </em>tegangan positif 78xx dapat dilihat pada | ||
| + | tabel diatas. Kode huruf pada bagian depan penulisan tipe <em>regulator </em>78xx merupakan kode produsen (AN78xx, LM78xx, MC78xx) <em>regulator </em> | ||
| + | tegangan positif 78xx. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | Cara pemasangan dari regulator tegangan tetap 7805 pada catu daya dapat dilihat pada gambar 2.21 sebagai berikut.<strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.19. </strong> | ||
| + | <strong>Rangkaian dasar <em>ICregulator </em>tegangan</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>positif78xx</strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Sumber:</strong> | ||
| + | <a href="http://elektronika-dasar.web.id"><strong>http://elektronika-dasar.web.id</strong></a> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>1. </strong> | ||
| + | <strong>Penggunaan <em>IC regulator</em> dalam rangkaian</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | IC 7805 merupakan IC peregulasi, dimana IC 7805 bekerja pada sumber arus searah yang menghasilkan keluaran 5 <em>volt </em>sedangkan pada rangkaian IC ini | ||
| + | digunakan untuk memaksa keluaran yang kita berikan diatas 5 <em>volt</em> menjadi 5 <em>volt</em> dengan hasil positif, sesuai dengan data IC 7805 bekerja | ||
| + | efektif antara range 7V-20V. IC 7805 terdapat beberapa macam mulai dari komponen <em>SMD</em> (<em>surface mount device</em>) sampai aplikasi umum dengan | ||
| + | keluaran arus sampai dengan 1A. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.20. Rangkaian <em>IC regulator</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong><em> </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.13. Konsep Dasar Transistor </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Transistor </strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> | ||
| + | Transistor merupakan komponen dengan fungsi bermacam-macam. Komponen ini dapat berfungsi seperti layaknya keran air. Arus yang dialirkan bisa diatur | ||
| + | secara elektronis. Berdasarkan kategori, ada transistor yang tergolong sebagai PNP dan ada pula yang termasuk sebagai NPN. N dan P menyatakan tipe | ||
| + | semikonduktor yang digunakan. Pada PNP, dua lapis semikonduktor tipe-p mengapit satu lapis semikonduktor tipe n. Pada NPN, dua lapis semikonduktor | ||
| + | tipe-n mengapit satu lapis semikonduktor tipe-p. | ||
| + | </strong> | ||
| + | <strong></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <br clear="ALL"/> | ||
| + | <strong>Berikut ini adalah gambaran komponen dan simbol transistor:</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.21. Komponen dan simbol</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Fungsi transistor dalam dunia elektronika mempunyai peranan yang sangat penting, berikut ini beberapa fungsi transistor: | ||
| + | </p> | ||
| + | <p> | ||
| + | a. Sebagai sebuah pneguat (<em>amplifier)</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | b. Sirkuit pemutus dan penyambung (<em>switching)</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | c. Stabilisasi tegangan (<em>stabilisator)</em> | ||
| + | </p> | ||
| + | <p> | ||
| + | d. Sebagai perata arus | ||
| + | </p> | ||
| + | <p> | ||
| + | e. Menahan sebagian arus | ||
| + | </p> | ||
| + | <p> | ||
| + | f. Menguatkan arus | ||
| + | </p> | ||
| + | <p> | ||
| + | g. Membangkitkan frekuensi rendah maupu tinggi | ||
| + | </p> | ||
| + | <p> | ||
| + | h. Modulasi sinya dan berfungsi lainnya. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dalam rangkaian analog, transistor digunakan dalam amplifier (<em>penguat).</em>Rangkaian analog ini meliputi pengeras suara, sumber listrikstabil, dan | ||
| + | penguat sinyal radio.Dalam rangkaian-rangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi.Beberapa diantara transistor dapat juga | ||
| + | dirangkai sedemikian rupa, sehingga fungsi transistor menjadi sebagai logic gate, memori, dan komponen lainnya. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.14. Konsep Dasar Diode</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Diode </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Merupakan komponen diode biasa digunakan sebagai penyearah arus karena sifatnya yang hanya melewatkan arus secara searah dan menahan arus sebaliknya. Untuk | ||
| + | dapat memahami bagaimana cara kerja dioda pada rangkaian Elektronik kita dapat meninjau 3 situasi sebagai berikut ini yaitu: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Diode diberi tegangan nol | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Diode diberi tegangan negative | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Diode diberi tegangan positive | ||
| + | </p> | ||
| + | <p> | ||
| + | A. DiodaDiberiTeganganNol | ||
| + | </p> | ||
| + | <p> | ||
| + | Ketika dioda diberi tegangan nol maka tidak ada medan listrik yang menarikelektron dari katoda. Elektron yang mengalami pemanasan pada katoda hanya mampu | ||
| + | melompat sampai pada posisi yang tidak begitu jauh dari katoda dan membentuk muatan ruang (Space Charge). Tidak mampunya elektron melompat menuju katoda | ||
| + | disebabkan karena energi yang diberikanpada elektron melalui pemanasan oleh heater belum cukup untukmenggerakkan elektron menjangkau plate. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Dioda Diberi Tegangan Negative | ||
| + | </p> | ||
| + | <p> | ||
| + | Ketika diode diberi tegangan negative, maka potensial negative yang ada pada plate akan menolak electron yang sudah membentuk muatan ruang sehingga | ||
| + | electron tersebut tidak akan dapat mengjangkau plate sebaliknya akan terdorong kembali ke katoda, sehingga tidak aka nada arus yang mengalir. | ||
| + | </p> | ||
| + | <p> | ||
| + | C. Dioda Diberi Tegangan Positive | ||
| + | </p> | ||
| + | <p> | ||
| + | Ketika diode diberi tegangan positif maka, potensial positif yang ada pada plate akan menarik electron yang baru saja terlepas dari katoda oleh karena | ||
| + | emisi thermionic, pada situasi inilah arus listrik baru akan terjadi. Seberapa besar arus listrik yang akan mengalir tergantung dari pada besarnya tegangan | ||
| + | positif yang dikenakan pada plate. Semakin besar tegangan plate akan semakin besar pula arus listrik yang akan mengalir. | ||
| + | <br/> | ||
| + | Oleh karena sifat dioda yang seperti ini yaitu hanya dapatmengalirkan arus listrik pada situasi tegangan tertentu saja, maka dioda dapat digunakan sebagai | ||
| + | penyearah arus listrik (rectifier). Pada kenyataannya memang dioda banyak digunakan sebagai penyearah tegangan AC menjadi tegangan DC pada rangkaian | ||
| + | Elektronik. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br/> | ||
| + | 2. Karakteristik Dioda | ||
| + | <br/> | ||
| + | Hampir semua peralatan Elektronika memerlukan sumber arus searah. Penyearah digunakan untuk mendapatkan arus searah dari suatu arus bolak-balik. Arus atau | ||
| + | tegangan tersebut harus benar-benar rata tidak boleh berdenyut-denyut agar tidak menimbulkan gangguan bagi peralatan yangdicatu. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dioda sebagai salah satu komponen aktif sangat popular digunakan dalam rangkaian Elektronika, karena bentuknya sederhana dan penggunaannya sangat luas. Ada | ||
| + | beberapa macam rangkaian dioda, diantaranya : penyearah setengah gelombang (Half-Wave Rectifier), penyearah gelombang penuh (Full-Wave Rectifier), | ||
| + | rangkaian pemotong (Clipper), rangkaian penjepit (Clamper) maupun pengganda tegangan (Voltage Multiplier). Di bawah ini merupakan gambar yang | ||
| + | melambangkandioda penyearah. | ||
| + | <br/> | ||
| + | Sisi Positif (P) disebut Anoda dan sisi Negatif (N) disebut Katoda. Lambang dioda seperti anak panah yang arahnya dari sisi P ke sisi N. Karenanya ini | ||
| + | mengingatkan kita pada arus konvensional dimana arus mudah mengalir dari sisi P ke sisi N. | ||
| + | </p> | ||
| + | <p> | ||
| + | Dan berikut gambar dari karakteristik diode: | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>Gambar 2.22. Karakteristik diode</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Berikut ini adalah penjelasan macam Dioda sebagai berikut: | ||
| + | <br/> | ||
| + | 1. Dioda Standar | ||
| + | </p> | ||
| + | <p> | ||
| + | Dioda jenis ini ada dua macam yaitu silikon dan germanium. Dioda silikon mempunyai tegangan maju 0.6V sedangkan dioda germanium 0.3V. Dioda jenis ini | ||
| + | mempunyai beberapa batasan tertentu tergantung spesifikasi. Batasan batasan itu seperti batasan tegangan reverse, frekuensi, arus, dan suhu. Tegangan maju | ||
| + | dari dioda akan turun 0.025V setiap kenaikan 1 derajat dari suhu normal. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br/> | ||
| + | 2. Dioda Rectifier | ||
| + | <br/> | ||
| + | Rectifier berfungsi sebagai penyearah Arus ( AC ke DC ). Biasanya Rectifier lebih dikenal sebagai Dioda karena penyearah arus ialah fungsi dasar dari | ||
| + | dioda, tetapi lebih spesifik lagi merupakanfungsidarirectifier. | ||
| + | <br/> | ||
| + | 3. Dioda Kiprok | ||
| + | <br/> | ||
| + | Kiprok berfungsi untuk regulator tegangan yang biasa digunkan padakendaraanbermotor.Maka jika arus 12 volt maka arus akan tetap stabil menjadi 12 volt | ||
| + | meskipun arus naik. Namun memiliki ampere yang berbeda-beda. sebenarnya tidak ada bedanya dengan Rectifier namun kiprok adalah gabungan komponen tambahan | ||
| + | sebagai penyetabil tegangan. Sehingga bila tunggangan tak dilengkapi aki, bohlam lampu pada sepeda motor tidak cepat putus. | ||
| + | <br/> | ||
| + | 4. Dioda Selenium | ||
| + | <br/> | ||
| + | Disebut dioda selenium karena banyak terbuat dari selenium. Dioda ini memiliki keandalan yang tinggi & mampu dialiri tegangan arus listrik yang cukup | ||
| + | tinggi. Biasanya dipergunakan sebagai perata dalam rangkaian power supply. Dioda selenium dirancang memiliki 4 kaki; 2 kaki diantaranya merupakan bagian | ||
| + | inputnya tegangan arus AC & 2 kaki lainnya sebagai output yang diberi tanda (+) & (-) yang menghasilkan arus DC. | ||
| + | </p> | ||
| + | <p> | ||
| + | <br/> | ||
| + | 5. Dioda Zener | ||
| + | <br/> | ||
| + | Dioda zener adalah diode yang berfungsi sebagai penstabil tegangan. Selain itu dioda zener juga dapat dipakai sebagai pembatas tegangan pada level tertentu | ||
| + | untuk keamanan rangkaian. Karena kemampuan arusnya yang kecil maka pada penggunaan dioda zener sebagai penstabil tegangan untuk arus besar diperlukan | ||
| + | sebuah buffer arus. Dioda zener dibias mundur (reverse). | ||
| + | </p> | ||
| + | <p> | ||
| + | Beberapa fungsi diode adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 1. Penyearah,contoh:diodabridge. | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 2. Penstabil tegangan (voltage regulator), yaitu dioda zener. | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 3. Pengaman/sekering. | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 4. Sebagairangkaian clipper, yaitu untukmemangkas/membuang level sinyal yang ada di atas atau di bawah level tegangan tertentu. | ||
| + | </p> | ||
| + | <p align="left"> | ||
| + | 5. Sebagai rangkaian clamper, yaitu untuk menambahkan komponen dc kepada suatu sinyal ac. | ||
| + | </p> | ||
| + | <p> | ||
| + | 6. Penggandategangan. | ||
| + | </p> | ||
| + | <p> | ||
| + | 7. Sebagai indikator, yaitu LED (light emiting diode). | ||
| + | </p> | ||
| + | <p> | ||
| + | 8. Sebagai sensor panas, contoh aplikasi pada rangkaian power amplifier. | ||
| + | </p> | ||
| + | <p> | ||
| + | 9. Sebagai sensor cahaya, yaitu dioda photo. | ||
| + | </p> | ||
| + | <p> | ||
| + | 10. Sebagai rangkaian VCO (voltage controlled oscilator), yaitu dioda varactor. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.15. Konsep Dasar Elisitasi </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong> 1. Definisi Elisitasi </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Guritno, Sudaryono dan Untung Rahardja (2010:302), “Elisitasi <em>(elicitation) </em>berisi usulan rancangan sistem baru yang diinginkan oleh pihak | ||
| + | manajemen terkait dan disanggupi oleh penulis untuk dieksekusi”. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2. Jenis-jenis Elisitasi </strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Guritno, Sudaryono dan Untung Rahardja(2010:302), “Elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu sebagai | ||
| + | berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | A. Elisitasi Tahap I | ||
| + | </p> | ||
| + | <p> | ||
| + | Berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara. | ||
| + | </p> | ||
| + | <p> | ||
| + | B. Elisitasi Tahap II | ||
| + | </p> | ||
| + | <p> | ||
| + | Merupakan hasil pengklasifikasian dari elisitasi tahap I merode berdasarkan MDI. Metode MDI bertujuan untuk memisahkan antara rancangan sistem yang penting | ||
| + | dan harus ada pada sistem baru dengan rancangan yang disanggupi untuk dieksekusi. | ||
| + | </p> | ||
| + | <p> | ||
| + | · M pada MDI itu artinya <em>Mandatory. </em>Maksudnya <em>requiretment </em>tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru. | ||
| + | </p> | ||
| + | <p> | ||
| + | · D pada MDI adalah <em>Desirable. </em>Maksudnya requirement | ||
| + | </p> | ||
| + | <p> | ||
| + | Tesebut tidak terlalu penting dan boleh dihilangkan, tetapi jika <em>requirement </em>tersebut digunakan dalam pembentukan sistem, akan membuat sistem | ||
| + | tersebut lebih sempurna. | ||
| + | </p> | ||
| + | <p> | ||
| + | · I pada MDI adalah <em>Inessential. </em>Maksudnya bahwa requirement tersebut bukanlah bagian dari sistem yang dibahas dan merupakan bagian luar sistem. | ||
| + | </p> | ||
| + | <p> | ||
| + | C. Elisitasi Tahap III | ||
| + | </p> | ||
| + | <p> | ||
| + | Merupakan hasil penyusutan dari elisitasi tahap II dengan cara mengliminasi semua <em>requirement </em>yang optionnya I pada metode MDI. Selanjutnya semua <em>requirement </em>yang tersisa diklasifikasikan kembali melaui metode TOE. | ||
| + | </p> | ||
| + | <p> | ||
| + | § T adalah <em>Technical, </em>artinya bagaimana tata cara/teknik pembuatan <em>requirement </em>tersebut dalam sistem yang diusulkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | § O adalah <em>Operasional, </em>artinya bagaimana tata cara pengguna <em>requirement </em>tersebut dalam sistem yang akan dikembangkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | § E adalah <em>Economic, </em>artinya berapakah biaya yang diperlukan guna membangun <em>requirement </em>tersebut didalam sistem. | ||
| + | </p> | ||
| + | <p> | ||
| + | D. Final Draft Elisitasi | ||
| + | </p> | ||
| + | <p> | ||
| + | Final draft merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan | ||
| + | dikembangkan. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.2.16. Konsep Dasar </strong> | ||
| + | <strong>Literrature Review</strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>1. </strong> | ||
| + | <strong>Definisi <em>Literatur Review </em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Menurut Guritno, Sudaryono dan Untung Rahardja (2010:86) “Literratur Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah | ||
| + | menemukan jawaban untuk pertanyaann-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai | ||
| + | pustaka atau laporan hasil penelitian yang paling <em>actual, </em>maka kita tidak perlu melakukan penelitian yang sama. | ||
| + | </p> | ||
| + | <p> | ||
| + | <strong>2.3. <em>Literatur Review</em></strong> | ||
| + | </p> | ||
| + | <p> | ||
| + | Beberapa Literatur Riview tersebut adalah sebagai berikut: | ||
| + | </p> | ||
| + | <p> | ||
| + | 1. Penelitian yang dilakukan oleh Noveri (2012) dari Perguruan Tinggi Raharja yang berjudul “Data logger sensor suhu berbasis Mikrokontroler ATmega 8535 | ||
| + | dengan PC sebagai tampilan”. | ||
| + | </p> | ||
| + | <p> | ||
| + | 2. Penelitian yang dilakukan oleh Nugroho Adi Hatmanto (2010) dari Perguruan Tinggi Raharja yang berjudul “Monitoring suhu ruangan berbasis SMS gateway”. | ||
| + | </p> | ||
| + | <p> | ||
| + | 3. Penelitian yang dilakukan oleh Betha Saputra (2013) dari Perguruan Tinggi Raharja yang berjudul “Alat Pendeteksi kebakaran rumah dan pemberi informasi | ||
| + | kepada pemilik rumah”. | ||
| + | </p> | ||
| + | <p> | ||
| + | 4. Penelitian yang dilakukan oleh Reza Nursyah Putra (2014) dari Perguruan Tinggi Raharja yang berjudul “Prototype Alat pembersih toren otomatis | ||
| + | menggunakan SMS gateway pada STMIK Raharja”. | ||
| + | </p> | ||
| + | <p> | ||
| + | 5. Penelitian yang dilakukan oleh Muhammad Bintar (2013) dari Perguruan Tinggi Raharja yang berjudul “Sistem Pnegontrolan Lampu Mneggunakan Input Suara | ||
| + | Berbasis Arduino” | ||
| + | </p> | ||
| + | <p> | ||
| + | Dari beberapa sumber <em>literature riview </em>di atas, informasi yang diberikan masih terbatas. Sedangkan saat ini kemajuan teknologi sudah berkembang | ||
| + | dengan pesat. Untuk itu dibuatlah penelitian yang berjudul <strong>“Sistem Alat Penyiram Tanaman Pada Taman Perkotaan Menggunakan Interface VB.NET Berbasis Mikrokontroler ATmega 32u4”.</strong> | ||
</p> | </p> | ||
Revisi per 23 Januari 2015 15.26
SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN
MENGGUNAKAN INTERFACE VB.NET BERBASIS
MIKROKONTROLER ATMEGA 32u4

Disusun Oleh :
Nim |
: 1031465420
|
Nama |
: Aldo Edward Siallagan
|
JURUSAN SISTEM KOMPUTER
KONSENTRASI COMPUTER SYSTEM
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
TANGERANG
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN
MENGGUNAKAN INTERFACE VB.NET BERBASIS
MIKROKONTROLER ATMEGA 32U4
Disusun Oleh :
Nim |
: 1031465420
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Sistem Komputer
|
Disahkan oleh,
| Tangerang, Januari 2015
| ||||||||||||||||||||||||
| Ketua |
Kepala Jurusan
| |||||||||||||||||||||||
| STIMIK RAHARJA, |
Sistem Komputer,
| |||||||||||||||||||||||
| Ir. Untung Rahardja, M.T.I. |
Ferry Sudarto, S.Kom., M.Pd.
| |||||||||||||||||||||||
| NIP : 000594 |
NIP : 079010
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN
MENGGUNAKAN INTERFACE VB.NET BERBASIS
MIKROKONTROLER ATMEGA 32U4
Dibuat Oleh :
Nim |
: 1031465420
|
Nama |
Telah disetujui untuk dipertahankan dihadapan tim penguji ujian komprehensip
Jurusan Sistem Komputer
Konsentrasi Sistem Komputer
Tahun Akademik 2014 /2015
Disetujui oleh,
| Tangerang, Januari 2015
| ||||||||||||||||||||||||
| Pembimbing I |
Pembimbing II
| |||||||||||||||||||||||
| (Indrianto, M.T.) |
(Radiyanto, Drs.,M.Pd.)
| |||||||||||||||||||||||
| NIP : 05061 |
NIP : 08183
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN
MENGGUNAKAN INTERFACE VB.NET BERBASIS
MIKROKONTROLER ATMEGA 32U4
Dibuat Oleh :
Saya yang bertanda tangan dibawah ini,
| |
Nim |
: 1031465420
|
Nama |
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: Sistem Komputer
|
Menyatakan bahwa skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan atau duplikat dari skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja, maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab serta bersedia menerima sanksi jika ternyata pernyataan di atas tidak benar.
| Tangerang, Januari 2015 | |
| Aldo Edward Siallagan | |
| Nim. 1031465420 |
*)Tanda tangan dibubuhi meterai 6.000,
ABSTRAKSI
Robot merupakan sistem electro mechanical yang dapat melakukan tugas fisik baik secara otomatis maupun manual. Pada umumnya, proses penyiram tanaman masih dilakukan secara manual, yaitu dengan menyiram secara langsung menggunakan ember atau wadah lainnya sehingga penggunaan teknologi masih kurang bisa dimanfaatkan dengan baik oleh manusia, terutama pada saat melakukan penyiramaan tanaman dengan memberikan supply air yang cukup. Prinsip kerja dari robot ini dikendalikan oleh sebuah Mikrokontroler ATmega 32u4 sebagai sistem kerja pada robot dan tempat pemprosesan untuk menampilkan output pada desktop gadget laptop sebagai indikasi pengkondisian. Mikrokontroler akan mendapatkan input dari dua buah sensor, yaitu sensor kelembapan (Humidity). Sensor kelembapan akan memberikan input ke Mikrokontroler dan mendeteksi jenis tanah yang memerlukan air, dan memberikan input ke Mikrokontroler untuk mengaktifkan driver motor servo untuk mendeteksi objek tanah tersebut. Kemudian, Mikrokontroler akan mengaktifkan pompa untuk menyiram tanaman berdasarkan warna yang telah diprogram dengan lama waktu penyiraman 10s, 5s, dan 2s. Kemudian karakter warna memberikan sinyal warna pada lampu LED. Jadi, robot tidak akan melakukan proses penyiraman tanaman sesuai dengan waktu yang telah ditentukan, jika sensor warna tidak mendeteksi warna merah, hijau, dan biru.
Kata Kunci : Mikrokontroler ATmega 32u4, Lampu LED, Sensor Kelembapan (Humidity), Motor Servo.
ABSTRACT
Robots are electro mechanical system that can perform both tasks automatic physical or manual. In general, plants process is still done manually, by direclty using a watering bucket or other container so that the use of technology is still less could used well by humans, especially at the time of watering the plants by providing adequate water supply. The working principle of this robots controlling by a microcontroller ATmega 32u4 as working on the robotic system and the processingto display the output on the LED light color is detected in the form of characters. The microcontroller will receive input from two sensors, the humidity sensor (Humidity). Humidity sensors will provide input to microcontroller and detects the type of soil that requires water, and provide input to the microcontroller to enable the servo motor driver to detect the land object. Then, the microcontroller will active the pump for watering plants based on color that has been programmed with a set lenght of time watering 10s, 5s, and 2s. Then the character of color give color signal on the LED lights. Thus, the robot will not do the watering process in accordance with a predetermined time, when the sensors does not detect the colors red, green, and blue.
Keywords: Microcontroller ATmega 32u4, LED light, Humidity sensors, and motor driver.
KATA PENGANTAR
Puji dan syukur kehadirat Tuhan yang Maha Esa, karena atas berkat, bimbingan serta karunianya yang melimpah, sehingga penyusunan laporan Skripsi ini dapat diselesaikan dengan baik. Dimana skripsi ini dibuat dan disajikan dalam bentuk buku yang sederhana. Adapun judul yang diambil dalam penyusunan laporan skripsi ini adalah " SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN MENGGUNAKAN INTERFACE VB.NET BERBASIS MIKROKONTROLER ATMEGA 32u4".
Adapun manfaat dan tujuan dari penulisan laporan skripsi ini adalah untuk memenuhi tugas akhir yang diberikan oleh pihak akademik kepada mahasiswa, mahasiswi dalam rangka penempuhan ilmu di jenjang strata satu, dan pencapaian gelar Sarjana di STMIK Raharja.
Dalam penyusunan laporan skripsi ini masih banyak kekurangan, baik dari segi materi maupun teknis. Hal ini disebabkan karena keterbatasan kemampuan dan pengetahuan yang dimiliki, sehingga sangat diharapkan saran maupun kritik yang bersifat membangun.
Pada kesempatan ini tidak lupa mengucapkan rasa terima kasih kepada pihak-pihak yang telah membantu sehingga terlaksananya penulisan laporan skripsi ini, terutama kepada:
- Bapak Ir. Untung Rahardja, M.T.I., selaku Ketua STMIK Raharja.
- Bapak Sugeng Santoso, M.Kom, selaku Pembantu Ketua I STMIK Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd, selaku Kepala Jurusan Sistem Komputer S1 STMIK Raharja.
- Bapak Indrianto, M.T., selaku Dosen Pembimbing I yang senantiasa memberikan dorongan, motivasi dan bimbingan dalam menyusun laporan skripsi ini hingga selesai.
- Bapak Radiyanto, Drs., M.Pd., selaku Dosen Pembimbing II selalu membantu dalam penyusunan Laporan, perbaikan, dan penyempurnaan penulisan laporan Skripsi ini hingga selesai.
- Bapak , selaku Pimpinan Perusahaan pada dan selaku stekholder yang telah membantu memberikan data – data yang berhubungan dengan persediaan barang demi kelancaran skripsi ini.
- Bapak yang telah membantu mendampingi penulis dalam pengambilan data-data.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmunya.
- Kepada Orang tua tercinta yang tanpa lelah selalu memanjatkan doa dan memberikan segala dukungan moril, materil, dan spritual. "Semoga Tuhan senantiasa memberikan limpahan berkat dan rahmat dan juga umur panjang kepada Beliau semua, Amin". .
- Rekan-rekan seperjuangan yang tergabung dalam HImpunan Mahasiswa Jurusan (HIMTIF), Dan Unit Kegiatan Mahasiswa (MARANATHA) sahabat serta semua pihak yang tidak dapat penulis sebutkan satu persatu yang telah memberikan dorongan serta semangat untuk menyelesaikan laporan skripsi.
Semoga segala amal dan bantuan semua pihak serta dorongan yang telah diberikan dalam menyelesaikan laporan skripsi ini, mendapat balasan yang setimpal dari Tuhan Yang Maha Esa. Akhir kata ddengan segala keterbatasan dan kesederhanaan berharap penulisan laporan ini dapat memberikan manfaat bagi pembaca dan dapat menjadi bahan acuan dan mohon maaf apabila terjadi kesalahan-kesalahan dalam penulisan laporan skripsi inidikemudian hari.
Tangerang, Januari 2015
( Aldo Edward Siallagan )
Nim : 1031465420
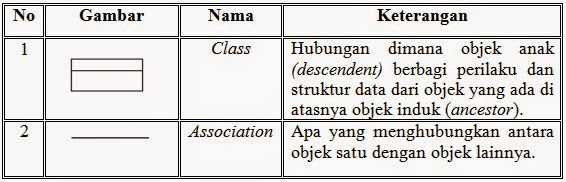
BAB I
PENDAHULUAN
1.1. Latar Belakang
Teknologi, tidak lepas dari pengetahuan, sehingga perkembangan kedua ilmu ini sangat erat saling mempengaruhi. Apa yang terjadi hari ini bagaimana perlombaan yang cepat dan pesat antara ilmu teknologi maupun ilmu pengetahuan, jadi tidak mengherankan kedua hal ini sangat sulit dipisahkan. Dari pada itu perkembangan yang terjadi tidak lepas pengaruhnya, terutama tehadap lingkungan yang ada disekitarnya. Lingkungan sendiri menjadi peran yang penting dari pengaruh yang terjadi, banyak teknologi yang sudah berperan penting dalam mengeksplorasi lingkungan bagi kehidupan manusia.
Seperti dua sisi magnet yang positif dan negative, tidak selalu perkembangan teknologi dan pengetahuan bisa sejalan dengan lingkungan tersebut. Ada kerugian dan keuntungan sendiri dari hal ini, seperti pencemaran minyak yang bocor di lautan disebabkan ilmu teknologi yang jauh terlalu berkembang dari sumber daya manusianya. Salah satu perkembangan teknologi dan pengetahuan diterapkan terhadap kegiatan manusia dalam kehidupan sehari-hari, seperti contoh sistem penyiraman tanaman yang sangat mudah. Lingkungan tak lepas dari kehidupan manusia, sehingga apa yang dilakukan manusia terhadap lingkungan itu sendiri.
Kehidupan manusia di perkotaan dituntut untuk berjalan sangat cepat. Lingkungan perkotaan sangat berbeda dengan daerah-daerah berkembang yang ada di pedesaan, dari sisi lingkungan yang juga berbeda. Dari itu banyak kota-kota yang menggalakan adanya daerah ruang terbuka hijau, selain banyaknya gedung-gedung yang tidak menyiapkan lahan yang cukup untuk ruang terbuka hijau.
Sebagaimana diketahui tanaman menjadi paru-paru oksigen pada suatu kota di satu negara, di perkotaan sendiri tanaman menjadi sangat langka karena semua ruang terbuka hijau sudah menjadi bangunan-bangunan pencakar langit. Karena itu beberapa ahli melakukan suatu gagasan yang menyarankan setiap perkotaan harus memiliki ruang terbuka hijau kurang dari 20% setiap kotanya. Dalam hal ini pun orang-orang yang hidup di perkotaan diharapkan peduli akan lingkungannya, apalagi hidup di perkotaan memiliki polusi yang sangat tinggi setiap tahunnya.
Oleh karena itu inovasi dan kreativitas para pionir dalam ilmu komputer terus berkembang sesuai jaman, untuk membantu manusia dalam berbagai hal. Sistem komputer pun terus menjadi pusat dalam perkembangannya, seperti membantu mengefisiensikan waktu, agar tidak menjadi sia-sia. Dalam hal ini penulis menuangakan idenya untuk bagaimana orang-orang di perkotaan dalam memanfaatkan sistem komputer yang berbasis robot penyiram tanaman otomatis.
Dari hal tersebut ada banyak teknologi yang berinovasi dalam perkembangannya untuk mengefesienkan pekerjaan manusia, oleh sebab itu bagaimana alat tersebut dapat bekerja lebih maksimal dari alat yang sudah ada sebelumnya. Seperti diketahui tumbuhan yang didaerah tropis akan mendapat sumber hujan yang sangat sedikit, sehingga perlu perkembangan sistem alat yang berinovasi dalam menghadapi cuaca ekstrim.
Ada dua aspek yang menjadi masalah dalam memperbaiki sistem yang ada, bagaimana mendeteksi jenis tanah dari tanaman tersebut, dan sumber air yang diperlukan .Jadi, apa yang selama ini menjadi masalah akan lebih mengurangi apa yang menjadi kendala. Berdasarkan permasalahan di atas maka penulis memilih judul “Sistem Alat Penyiram Tanaman Pada Taman Perkotaan Menggunakan Interface VB.NET Berbasis Mikrokontroler ATMEGA 32U4”.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, maka permasalahan dapat dirumuskan sebagai berikut:
1. Bagaimana menggunakan dan merancang interface VB.NET sebagai aplikasi yang memberikan informasi dari sistem penyiram tanaman yang terkontrol?
2. Bagaimana mengontrol relay agar dapat memutus atau menghubungkan pompa air ke motor servo?
3. Bagaimana Mikrokontroler berkomunikasi dengan perangkat Interface VB.NET melalui PC?
1.3. Ruang Lingkup Penelitian
Atas rumusan masalah diatas, maka dapat disimpulkan pada perancangan dan pembuatan sebuah alat yang diakses melalui Database, VB(Visual Basic) sebagai program perncangan, dan Lampu LED (Light emitting diode). Sebagai pendeteksi objek menggunakan mikrokontroler ATmega 32u4, serta komponen pendukung sistem meliputi:
1. LED (Light emitting diode) berfungsi sebagai pendeteksi kondisi kelembapan suatu tanah
2. Menggunakan mikrokontroler ATmega 32u4
3. Untuk mengakses atau mengontrol alat menggunkan PC (Laptop) menggunakan program VB.NET.
4. Sensor kelembapan (humidity) sebagai pendeteksi jenis tanah.
1.4. Tujuan dan Manfaat Penelitian
1.4.1. Tujuan Penelitian
Adapun tujuan dari penelitian yang dilakukan adalah sebagai berikut:
A. Tujuan Operasioanl
1. Mengubah sistem yang kovensional menjadi sistem yang lebih terprogram
2. Memanfaatkan LED (Light emitting diode) sebagai pendeteksi kondisi kelembapan dari suatu tanah.
B. Tujuan Fungsional
1. Membuat sistem yang manual menjadi ke sistem yang otomatis.
C. Tujuan Individu ( P ribadi)
1. Untuk mengimplementasikan ilmu yang telah dipelajari
2. Untuk memenuhi syarat kelulusan untuk jenjang Strata satu (S1).
1.4.2. Manfaat Penelitian
Adapun manfaat dalam penelitian ini adalah sebagai berikut:
A. Manfaat Individu
1. Memberikan kepuasan karena dapat menciptakan sesuatu yang bermanfaat bagi masyarakat
2. Dapat mengembangkan ilmu komputer yang diperoleh oleh penulis selama perkuliahan
1.5. Metodologi Penelitian
Dalam mendapatkan data yang diperlukan dalam penelitian maka, penulis menggunakan beberapa metode yang digunakan adalah sebagai berikut:
1.5.1. Metode Pengumpulan Data
Dari hasil metode penelitian yang digunakan adalah metode dengan cara mengumpulkan dan menggambarkan data mengenai keadaan secara langsung dari lapangan atau tepatnya yang menjadi objek penelitian untuk mendapatkan data secara relevan.
Beberapa teknik pengumpulan data yang penulis lakukan dalam mencari dan mengumpulkan data serta mengolah informasi yang diperlukan menggunakan metode sebagai berikut:
1. Metode Obsevasi (Observation Research)
Penulis melakukan pengamatan langsung dari objek penulisan untuk mendapatkan data dan infromasi yang akurat mengenai sistem Penyiram tanaman otomatis berbasis sensor kelembapan (humidity).
2. Metode Wawancara (Interview Research)
Penulis melakukan wawancara kepada sebagian orang yang berkompeten dalam bidangnya yang menyangkut objek bahasan yang diambil oleh penulis.
3. Metode Studi Pustaka (Library Research)
Selain melakukan observasi penulis juga melakukan pencarian informasi dengan cara studi pustaka dalam metode ini penulis berusaha untuk melengkapi informasi-infromasi yang diperoleh dengan membaca serta mempelajari buku dan artikel yang relevan dalam pemilihan judul yang penulis ajukan. Buku dan artikel tersebut digunakan penulis untuk membantu penganalisan dan perancangan yang dilakukan.
1.5.2. Metode Analisa
Setelah proses pengumpulan data dilaksanakan melalui beberapa teknik maka, data yang sudah ada diolah dan dianalisa upaya mendapatkan suatu hasil yang bermanfaat bagi penelitian ini. Maka, dilakukan tiga tahapan, yaitu:
1. Analisa proses yang sedang berjalan
2. Identifikasi kebutuhan
3. Indentifikasi persyaratan dari sistem yang akan dibuat.
Hasil analisa tersebut kemudian dibuat laporan dalam perancangan sistem yang diusulkan.
1.5.3. Metode Perancangan
Dari perancangan penulis menggunakan metode sistem flowchart dimana tahap proses pembuatan alat sistem penyiram tanaman otomatis sensor kelembapan (humidity).
1.5.4. Metode Prototipe
Prototipe yang digunakan dalam penulisan skripsi ini adalah pendekatan evolutionary, dimana penulis melakukan pengembangan terhadap LCD (Liquid cristal display ) secara terkontrol melalui database.
1.5.5. Metode Testing
Dalam metode pengujian ini penulis melakukan uji coba dengan metode black box terhadap prototype yang telah dibuat agar diketahui apakah prototype sudah berjalan sesuai ketentuan.
1.6. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja sistem data base dalam mengkondisikan sensor dan motor servo berbasis mikrokontroler ATmega 32u4, maka penulisan skripsi ini dibagi menjadi beberapa bagian dengan sistematika sebagai berikut:
BAB I PENDAHULUAN
Bab ini menjelaskan tentang informasi umum, latar belakang masalah, rumusan masalah, ruang lingkup penelitian, tujuan dan manfaat penelitian, metodologi penelitian, metode analisis, metode perancangan, sumber data, dan sistematika penulisan.
<a name="_GoBack"></a>
BAB II LANDASAN TEORI
Bab ini berisi tentang uraian mengenai teori-teori dasar elektronika yang akan mendukung pembahasan, serta penulisan dalam penyusunan skripsi ini. Uraian tersebut menjelaskan tentang konsep dasar mikrokontroler ATmega 32u4, sensor kelembapan (humidity), motor DC, motor servo, lampu LED, dan pendukung komponen-komponen lainnya.
BAB III PERANCANGAN DAN PEMBAHASAN
Bab ini memuat perancangan dan pembahasan “SISTEM ALAT PENYIRAM TANAMAN PADA TAMAN PERKOTAAN MENGGUNAKAN INTERFACE VB.NET BERBASIS MIKROKONTROLER ATmega 32u4” yang dijabarkan secara terperinci.
BAB IV UJI COBA DAN ANALISA
Bab ini berisi tentang penjelasan mengenai uji coba serta analisa pengoprasian dari sistem yang dibuat.
BAB V PENUTUP
Pada bab ini ditemukan kesimpulan dari hasil analisis yang telah dilakukan dan saran kepada pihak-pihak yang berkempentingan sehingga tujuan dan manfaat dari laporan skripsi ini dapat diselesaikan.
DAFTAR PUSTAKA
LAMPIRAN
BAB II
LANDASAN TEORI
2.1. Teori Umum
2.1.1. Konsep Dasar Sistem
1. Definisi Sistem
Sistem berasal dari bahasa latin (systema) dan bahasa yunani (sustema) adalah suatu kesatuan yang terdiri dari komponen atau elemen yang dihubungkan bersama untuk memudahkan aliran informasi, materi, atau energi untuk mencapai suatu tujuan.
Menurut Jerry Fithgerald (2009:2), ”Sistem dapat didefinisikan dengan pendekatan prosedur dan pendekatan komponen, sistem dapat didefinisikan sebagai kumpulan dari prosedur-prosedur yang mempunyai tujuan tertentu”.
Menurut Sutarman (2012:13), ”Sistem adalah kumpulan elemen yang saling berhubungan dan berinteraksi dalam satu kesatuan untuk menjalankan suatu proses pencapaian suatu tujuan utama”.
Menurut Mustakini (2009:34), ” Sistem dapat didefinisikan dengan pendekatan prosedur dan pendekatan komponen, sistem dapat didefinisikan sebagai kumpulan prosedur-prosedur yang mempunyai tujuan tertentu”.
Menurut Diana dan Setiawati (2011:3), ”Sistem adalah serangkaian bagian yang saling tergantung dan bekerjasama untuk mencapai tujuan tertentu”.
Menurut Mulyanto (2009:1), ”Secara umum, sistem dapat diartikan sebagai kumpulan dari elemen-elemen yang berinteraksi untuk mencapai suatu tujuan tertentu sebagai suatu kesatuan”.
Dari beberapa definisi sistem yang dikemukakan diatas, dapat diambil kesimpulan bahwa sistem adalah sekumpulan komponen atau elemen yang bekerjasama sesuai dengan fungsinya dan saling berhubungan untuk mencapai suatu tujuan tertentu.
2. Karakteristik Sistem
Setiap sistem mempunyai ciri-ciri atau karakteristik tersendiri (Hanif 2007:5).berikut ini adalah karakteristik tersebut:
1. Masukan (input): Sumber daya (data, bahan baku, peralatan, energi) dari lingkungan yang dikonsumsi dan dimanipulasi oleh suatu sistem.
2. Komponen Sistem (Components): Kegiatan atau proses dalam suatu sistem yang mentransformasikan input menjadi bentuk setengah jadi (output)
3. Keluaran (Output): Merupakan hasil dari energi yang diolah dan diklasifikasikan menjadi keluaran yang berguna dan sisa pembuangan. Keluaran dapat merupakan masukan untuk subsistem yang lain atau kepada supra sistem.
4. Batas Sistem (Boundary): Merupakan daerah yang membatasi suatu sistem dengan sistem yang lainnya atau dengan lingkungan luarnya. Batas sistem ini memungkinkan suatu sistem dipandang sebagai satu kesatuan.
5. Lingkungan Luar Sistem (Environments) : Lingkungan luar dari suatu sistem adalah apapun diluar batas sistem yang mempengaruhi operasi sistem. Lingkungan luar sistem dapat bersifat merugikan atau menguntungkan sistem tersebut.
6. Penghubung (interface) : Tempat di mana komponen atau sistem dan lingkungannya bertemu atau berinteraksi.
7. Pengolahan Sistem (Process) : Pengolahan sistem merupakan bagian yang melakukan perubahan dari masukan untuk menjadi keluaran yang diinginkan.
8. Sasaran Sistem (Objective and Goal) : Suatu sistem pasti memiliki sasaran atau tujuan, apabila sistem menjadi tidak mempunyai sasaran, maka operasi sistem tidak akan ada gunanya.
3. Klasifikasi Sistem
Menurut Mulyanto (2009:8), Sistem dapat diklasifikasikan dari berbagai sudut pandang, diantaranya adalah sebagai berikut:
1. Sistem Abstrak (Abstract system) dan Sistem Fisik (Physical system).
Sistem Abstrak(Abstract system) adalah sistem yang berupa pemikiran atau gagasan yang tidak tampak secara fisik. Contoh: sistem teologi yaitu sebuah pemikiran tentang hubungan antara manusia dengan Tuhan.
Sedangkan Sistem Fisik(Physical system) adalah sistem yang ada secara fisik dan dapat dilihat dengan mata. Contoh: sistem komputer, sisten akutansi, sistem tranportasi, dan lain sebagainya.
2. Sistem Alamiah (Natural system) dan Sistem Buatan Manusia (Human mode system).
Sistem Alamiah(Natural system) adalah sistem yang terjadi melalui proses alam, tidak dibuat manusia. Contoh: perputaran bumi.
Sistem Buatan Manusia(Human mode system) adalah sistem yang dirancang oleh manusia. Sistem buatan manusia yang melibatkan interaksi antara manusia dengan mesin.
3. Sistem Tertentu (Deterministic system) dan Sistem Tak tertentu (Probability system)
Sistem tertentu(Deterministic system) melibatkan operasi yang sudah dapat di duga dengan pasti, dapat dideteksi dan diramalkan hasil keluarannya, contohnya adalah sistem komputer dimana tingkah lakunya dapat diatur dengan baris-baris program yang dijalankan.
Sistem Tak Tentu (Probabilitas System) yaitu sistem yang tidak dapat diprediksikan kejadiannya, misalnya kejadian-kejadian dimasa yang akan datang merupakan hal rahasia dan tidak dapat diprediksikan karena menyangkut unsur probabilitas.
4. Sistem Terbuka (Opened system) dan Sistem Tertutup (Closed system)
Sistem Terbuka (Opened system) adalah sistem yang bekerja karena pengaruh dari pihak luarnya. Oleh karena itu perlu adanya sistem pengendalian yang dapat menjaga agar pengaruh tersebut hanya berupa pengaruh yang baik saja.
Sistem Tertutup (Closed system) yaitu merupakan sistem yang tidak terpengaruh atau tidak terganggu oleh lingkungan luarnya. Karena bekerja secara otomatis tanpa campur tangan dari pihak luarnya. Walaupun tidak ada sistem yang benar-benar tertutup, yang ada hanyalah sistem relatif tertutup ( relatively closed system).
2.1.2. Konsep Dasar Pengontrolan
1. Definisi Pengontrolan
Pada bagian teori ini akan dijelaskan mengenai dasar teori yang berkaitan dengan sistem-sistem hardware dan software yang membangun prototype robot penyiram tanaman ini seperti,
Menurut Erinofiardi (2012:261), “Suatu sistem control otomatis dalam suatu proses kerja berfungsi mengendalikan proses tanpa adanya campur tangan manusia (otomatis)”.
Kontrol otomatis mempunyai peran penting dalam dunia industri modern saat ini. Seiring perkembangan kemajuan ilmu pengetahuan dan teknologi, sistem control otomatis telah mendorong manusia untuk berusaha mengatasi segala permasalahan yang timbul di sekitarnya dengan cara yang lebih mudah.
Berdasarkan Ejaan Yang Disempurnakan (EYD) pengontrolan berasal dari kata control, control sama dengan pengawasan, pemeriksaan, dan pengendalian. Pada industry besar dan modern sangat memerlukan tenaga ahli perencanaan sistem pengendali dan perancangan desain sistem pengendali, termasuk teknisi professional sebagai operator. Dan tidak menutup kemungkinan bahwa pengontrolan berasal dari disiplin ilmu yang saling berhubungan karena teori sistem pengendali modern dikembangkan guna mengatasi kerumitan yang dijumpai pada berbagai sistem pengendalian yang menuntut kecepatan dan ketelitian yang tinggi dengan hasil output yang optimal.
Dalam sistem pengendali kita mengenal adanya sistem pengendali Loop Terbuka (Open-loop Control System) dan sistem pengendali Loop Tertutup ( Closed-loop Control System).
2. Jenis-Jenis Pengontrolan
A. Sistem Kontrol Loop Terbuka
Menurut Erinofiardi (2012:261) “Sistem kontrol loop terbuka adalah suatu sistem kontrol yang keluarannya tidak berpengaruh terhadap aksi pengontrolan. Dengan demikian pada sistem control ini, nilai keluaran tidak diumpan- balikan ke parameter pengendalian”.
Gambar 2.1. Sistem pengendalian loop terbuka
Sumber: Erinofiardi (2012:261)
Gambar diagram blok diatas menggambarkan bahwa di dalam sistem tersebut tidak ada proses umpan balik untuk memperbaiki keadaan alat terkendali jika terjadi kesalahan. Jadi tugas dari elemen pengendali hanyalah memproses sinyal masukan kemudian mengirimkannya ke alat terkendali.
B. Sistem Kontrol Loop Tertutup
Menurut Erinofiardi (2012:261), Sistem loop tertutup adalah “suatu sistem kontrol yang sinyal keluarannya memiliki pengaruh langsung terhadap aksi pengendalian yang dilakukan”.
Yang menjadi ciri dari sistem pengendali tertutup adalah adanya sinyal umpan balik. Sinyal umpan balik merupakan sinyal keluaran atau suatu fungsi keluaran
dan turunannya, yang diumpankan ke elemen kendali untuk memperkecil kesalahan dan membuat keluaran sistem mendeklarasi hasil yang diinginkan.
Gambar 2.2. Sistem pengendali loop tertutup
Sumber : Erinofiardi (2012:261)
Gambar diatas menyatakan hubungan antara masukan dan keluaran dari loop sistem tertutup. Sinyal input yang sudah dibandingkan dengan sinyal umpan balik menghasilkan sinyal selisih atau sinyal kesalahan yang akan dikirimkan ke dalam elemen pengendali sehingga kemudian menghasilkan sebuah sinyal keluaran yang akan dikirim ke alat terkendali.
Sinyal input berupa masukan referensi yang akan menentukan suatu nilai yang diharapkan bagi sistem yang dikendalikan tersebut, dalam berbagai sistem pengendali, sinyal input dihasilkan oleh mikrokontroler.
2.1.3. Definisi Alat
Alat adalah suatu benda yang dipakai untuk mengerjakan sesuatu perkakas, perabot, yang dipakai untuk mencapai maksud (Kamus Besar Bahasa Indonesia, 2005, hal: 30).
2.1.4. Perkembangan Alat Penyiram Tanaman
Dunia teknologi saat ini menunjukan perkembangan yang cukup berarti dari waktu ke waktu. Salah satu dari pengaruh tersebut adalah perkembangan bagaimana sistem penyiraman yang ada saat ini semakin maju berkembang, Apalagi jika sistem tersebut bergerak dengan suatu kontrol yang terpadu, maka hal ini akan membawa dampak kepada manusia untuk bisa memikirkan dan membuat suatu bentuk kontrol yang sekiranya akan dapat membantu dengan efisien.
Penyiraman merupakan suatu hal yang tidak dapat dilepaskan di dalam menjaga serta merawat agar tanaman dapat tumbuh dengan subur. Kebutuhan air yang cukup merupakan salah satu hal yang sangat penting, dengan alat penyiram tanaman yang berkembang, diharapakan dapat menyesuaikan segala kekurangan dari sistem penyiram tanaman yang sudah ada.
Sistem alat penyiram tanaman ada beberapa cara dalam mengontrol sistem tersebut ada yang bersifat temporari/ sementara dan ada yang bersifat permanen, sistem yang sementara tersebut adalah seperti alat penyiram tanaman tersebut mengontrol suhu, kelembapan, dan lain-lain.
Dari sisi sistem yang bersifat permanen adalah seperti bagaimana alat penyiram tanaman mengontrol kebutuhan akan penyinaran atau intensitas cahaya yang diperlukan, dan mengontrol kebutuhan air yang cukup untuk tanaman tersebut.
2.1.5. Konsep Dasar Pemprograman VB.NET
Microsoft Visual Basic atau yang sering disingkat sebagai VB merupakan sebuah bahasa pemprograman yang menawarkan Integrated Development Environment (IDE) visual untuk membuat program perangkat lunak berbasis sistem operasi Microsoft Windows dengan menggunakan model pemprograman (COM).
Visual Basic merupakan bahasa pemprograman Basic dan menawarkan perkembangan perangkat lunak komputer berbasis grafik dengan cepat. Beberapa bahasa skrip, seperti Visual Basic for Applications (VBA) dan Visual Basic Scripting Edition (VBScript), sama seperti halnya Visual Basic, tetapi cara kerjanya yag berbeda.
Microsoft Visual Basic .NET adalah sebuah alat untuk mengembangkan dan membangun aplikasi yang bergerak di atas sistem.NET Framework, dengan menggunakan bahasa Basic. Dengan alat ini, para programer dapat membangun aplikasi Windows Forms, aplikasi web berbasis ASP.NET, dan juga aplikasi Command-line.
2.1.6. Pengenalan PHP (Personal Home Page)
PHP (Personal home page) merupakan script untuk pemprograman web server-side, script yang membuat dokumen HTML secaraon the flv, dokumen HTML yang dihasilakan dari suatu aplikasi bukan dokumen HTML yang dibuat dengan menggunakan teks editor atau editor HTML. Dengan menggunakan PHP, maintenance suatu situs web menjadi lebih mudah.
Proses update data dapat dilakukan dengan menggunakan aplikasi yang dibuat dengan menggunakan script PHP, PHP/FI merupakan nama awal dari PHP, dibuat pertama kali oleh Rasmus Lerdoff PHP awalnya merupakan program CGI yang dikhususkan untuk menerima input melalui form yang ditampilkan dalam browser web. Software ini disebarkan dan dilesensikan sebagai perangkat lunak open source.Adapun keunggulan yang dimiliki oleh PHP adalah sebagai berikut:
1. Life Cycle yang sangat singkat, sehingga PHP selalu up to date mengikuti perkembangan teknologi internet
2. Cross platform, yakni PHP dapat dipakai di hampir semua webserver yang ada di pasaran (terutama Apache dan Microsoft IIS) dan dijalankan pada berbagai sistem operasi (Linux, Windows, FreeBSD).
3. PHP mendukung koneksi ke banyak database baik yang gratis maupun komersil, seperti MySQL, mSQL, Oracle, Microsoft SQL Server, Interbase, dan banyak lagi.
4. PHP bersifat open source dan gratis.
2.1.7. MySQL
MySQL merupakan sebuah software yang berguna sebagai suatu databse server yang cukup terkenal. Seiring dengan user script PHP untuk web porgraming. Database server itu sendiri merupakan suatu software yang bertugas untuk melayani permintaan (request) query dari client.
MySQL sebagai suatu database server mempunyai beberapa kemampuan, salah satunya harus menyediakan suatu sistem manajemen database yang dapat mengatur bagaimana menyimpan, menambah, mengakses data dan transaksi-transaksi database lainnya. MySQL cepat sekali berkembang, karena MySQL merupakan suatu software yang Open Source.
MySQL adalah Relational Database Management System (RDBMS) yang didistribusikan secara gratis dibawah lisensi GPL (General Public License). Dimana setiap orang bebas untuk menggunakan MySQL, namun tidak boleh dijadikan produk turunan yang bersifat komersial. MySQL sebenarnya merupakan turunan salah satu konsep utama dalam database sejak lama, yaitu SQL (Structured Query Language). SQL adalah sebuah konsep pengoperasian database, terutama untuk pemilihan atau seleksi dan pemasukan data, yang memungkinkan pengoperasian data dikerjakan dengan mudah secara otomatis.
Kendala suatu sistem database (DBMS) dapat diketahui dari cara kerja optimizer dalam melakukan proses perintah-perintah SQL, yang dibuat oleh user maupun program-program aplikasinya. Sebagai database
server, MySQL dapat dikatakan lebih unggul dibandingkan database server lainnya dalam query data. Hal ini terbukti untuk query yang dilakukan oleh single user, kecepatan query. MySQL dapat sepuluh kali lebih cepat dari Postgre SQL dan lima kali lebih cepat dibandingkan Interbase.
2.1.8. Konsep Dasar Metode Penelitian
1. Perancangan
A. DFD (Data Flow Diagram)
Data Flow Diagram (DFD) merupakan suatu cara atau metode untuk membuat rancangan sebuah sistem yang mana berorientasi pada alur data yang bergerak pada sebuah sistem pengembangan. Beberapa komponen DFD (Data Flow Diagram) adalah sebagai berikut:
1. User/Terminator: kesatuan diluar sistem yang memberikan input ke sistem atau menerima output dari sistem berupa orang organisasi, atau sistem lain.
2. Process: Aktifitas yang mengolah input menjadi output
3. Data Flow: Aliran data pada sistem
4. Data Store: Penyimpanan data pada database, biasanya berupa table.
Di dalam DFD terdapat tiga level untuk mencapai sistem yang ada menjadi sistem yang berjalan atau dalam pengembangan, yaitu
1. Diagram Konteks
2. Diagram Nol (Diagram level-1)
3. Diagram Rinci.
Untuk mengetahui bagan-bagan dalam DFD adapun gambar dibawah berikut ini:
Tabel 2.1. Bagan DFD
Sumber: <a href="http://ammarafsanjani.blogspot.com/2013/11/25-pengertian-data-flow-diagram-dan.html"> http://ammarafsanjani.blogspot.com/2013/11/25-pengertian-data-flow-diagram-dan.html </a>
B. Flowchart
Dalam membuat suatu program perlu adanya suatu cara untuk menganalisa suatu kasus yang akan dibuatkan program dengan salah satu bahasa pemprograman, salah satunya dengan Flowchart. Flowchart itu sendiri adalah sekumpulan gambar-gambar tertentu untuk menyatakan alur dari suatu program yang akan diterjemahkan ke salah satu bahasa pemprograman.
Kegunaan flowchart sama seperti halnya algoritma yaitu menuliskan alur program tetapi dalam bentuk gambar atau symbol. Flowchart sendiri terbagi atas dua bagian yaitu:
1. Flowchart yang menggambarkan alur suatu sistem
2. Flowchart yang menggambarkan alur dari suatu program.
Sistem flowchart adalah bagan yang memperlihatkan urutan prosedur dan proses dari beberapa file di dalam media tertentu, melalui flowchart ini dapat terlihat jenis media penyimpanan yang dipakai dalam pengolahan data.
Adapun dalam flowchart dalam menggambarkan alur sistem atau program menggunakan symbol tertentu seperti dibawah ini:
Tabel 2.2. dgfg
Sumber: <a href="http://mane3x.wordpress.com/2013/03/29/konsep-dasar-flowchart-dan-perbedaan-tiap-jenis-flowchart/">http://mane3x.wordpress.com</a>
2. Pengujian
A. White Box
Menurut Sodikin didalam jurnal Teknologi Informasi (2009:750), “Pengujian White Box berfokus pada struktur kontrol pengguna”.
B. Black Box
Menurut Budiman (2012:4), “Pengujian black box merupakan metode perancangan data uji yang didasarkan pada spesifikasi perangkat lunak. Data uji dibangkitkan, dieksekusi pada perangkat lunak dan kemudian keluaran dari perangkat lunak diuji apakah telah sesuai dengan yang diharapkan”.
3. Flowchart
Menurut Adelia di dalam jurnal Sistem Informasi (2011:116), “Flowchart adalah penggambaran secara grafik dari langkah-langkah dan urut-urutan prosedur dari suatu program”.
Flowchart dapat mempermudah penyelesaian suatu masalah khususnya masalah yang perlu dipelajari dan dievaluasi lebih lanjut, apabila seorang analis dan programmer akan membuat flowchart, ada beberapa pertunjuk yang harus diperhatikan sebagai berikut:
1. flowchart digambarkan dari halaman atas ke bawah dan kiri ke kanan.
2. Aktifitas yang digambarkan harus didefinisikan secara hati-hati dan definisi ini harus dimengerti oleh pembacanya.
3. Kapan aktifitas dimulai dan berakhir harus ditentukan secara jelas.
4. Setiap langkah dari aktifitas harus diuraikan dengan menggunakan dekripsi kata kerja.
5. Setiap langkah dari aktifitas harus berada pada urutan yang benar.
6. Lingkup dan range dari aktifitas yang sedang digambarkan harus ditelusuri dengan hati-hati.
7. Gunakan simbol-simbol flowchart yang standart.
2.1.9. PC (Personal Computer)/Laptop
1. Definisi PC
Personal Computer (PC) adalah seperangkat komputer yang digunakan oleh satu orang saja/pribadi. Biasanya komputer ini adanya dilingkungan rumah, kantor, toko, dan dimana saja karena harga PC sudah relativ terjangkau dan banyak macamnya. Adapun beberapa definisi komputer menurut para ahli sebagai berikut:
Menurut Mc Graw Hill, “Komputer adalah mesin penghitung elektronik yang cepat dan dapat menerima informasi input digital, kemudian memprosesnya sesuai dengan program yang tersimpan di memorinya, dan menghasilkan output berupa informasi.
Menurut V.C. Hamacher et al, “Komputer merupakan mesin penghitung elektronik yang dengan cepat dapat menerima informasi input digital, memprosesnya sesuai dengan program yang tersimpan di memorinya dan menghasilkan output informasi.
Menurut Robert H. Blissmer, “Komputer ialah suatu alat elektronik yang mampu melakukan beberapa tugas seperti menerima input, memproses input, menyimpan perintah-perintah dan menyediakan output dalam bentuk informasi.
Menurut Donald H. Sanderes, “Komputer adalah sistem elektronik untuk memanipulasi data dengan cepat dan tepat serta dirancang dan diorganisasikan agar secara otomatis menerima menyimpan data input.
Menurut Wikipedia, “Komputer adalah alat yang dipakai untuk mengolah data menurut prosedur yang telah dirumuskan.
Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna). Komputer memiliki tiga elemen yang menjadi satu kesatuan yang tidak terpisahkan, yaitu:
1. Hardware (Perangkat Keras)
2. Software (Perangkat Lunak)
3. Brainware (Pengguna/user)
Generasi komputer terbagi menjadi beberapa generasi dari lima generasi yaitu sebagai berikut:
1. Komputer Generasi Pertama (1946-1959): Tabung Vakum
2. Komputer Generasi Kedua (1959-1964): Transistor
3. Komputer Generasi Ketiga (1964-1970): IC (Integrated Circuit)
4. Komputer Generasi Keempat (1979): Mikroprocessor
5. Komputer Generasi Kelima LSI (Large scale integration).
<a name="_GoBack"></a>
2.1.10. Konsep Pompa Air (Submersible)
1. Definisi Pompa Air (Submersible)
Pompa air (submersible) pompa benam adalah pompa yang dioperasikan di dalam air dan akan mengalami kerusakan, jika dioperasikan dalam keadaan
tidak terdapat air terus-menerus. Jenis pompa ini mempunyai tinggi minimal air yagn dapat dipompa dan harus dipenuhi ketika bekerja agar life time pompa tersebut lama.Pompa jenis ini bertipe pompa sentrifugal.Pompa sentrifugal sendiri prinsip kerjanya mengubah energy kinetis
(kecepatan) cairan menjadi energy potensial (dinamis) melalui suatu impeller yang berputar dalam casing. Di bawah ini adalah gambar
konsep dasar pompa air (submersible) adalah sebagai berikut:
Gambar 2.3. …
2.2. Teori Khusus
2.2.1. Konsep Dasar Mikrokontroler
1. Definisi Mikrokontroller
Menurut Sumardi (2013:1), “Mikrokontroler merupakan suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bias ditulis dan dihapus dengan cara khusus, cara kerja mikrokontoler sebenarnya membaca dan menulis data”. Dari beberapa definisi-definisi diatas dapat disimpulkan bahwa mikrokontroler adalah sebauh sistem mikroprosesor dalam chip tunggal yang mana didalamnya terdapat CPU, ROM, RAM, I/O, CLOCK dan peralatan internal lainnya, dan juga mempunyai masukan dan keluaran serta kendali yang di fungsikan untuk membaca data, dan dengan program yang bisa ditulis dan dihapus dengan cara khusus.
2. Karakteristik Mikrokontroler
Menurut Sumardi (2013:2), mikrokontroler memiliki karakteristik sebagai berikut:
A. Memiliki program khusus yang disimpan dalam memori untuk aplikasi tertentu, tidak seperti PC yang multifungsi karena mudahnya memesukan program. Program mikrokontroler relative lebih kecil dari pada program-program pada PC.
B. Konsumsi daya kecil
C. Rangkainannya sederhana dan kompak
D. Harganya murah, karena komponenya sedikit
E. Unit I/O yang sederhana, misalnya LCD, LED, dan LATCH
F. Lebih tahan terhadap kondisi lingkungan ekstrim, misalnya temperature, tekanan, kelembapan, dan sebagainya
G. Klasifikasi Mikrokontroler.
Menurut Malik dam Mohammad Unggul Juwana (2009:3),Mikrokontroler memiliki beberapa klasifikasi yaitu, sebagai berikut:
1. ROM (Flash Memory) dengan kapasitas 1024 byte (1 KB)
2. RAM berkapasitas 68 byte
3. EEPROM (memori data) berkapasitas 64 byte
4. Total 13 jalur I/O (Port B 8 bit)
5. Timer/Counter 8 bit dengan prescaler
6. Fasilitas pemprograman di dalam sistem (ICSP=In Circuit Serial Programing).
3. Fitur-fitur Mikrokontroler
Menurut Malik dan Mohammad Unggul Juwana (2009:3), ada beberapa fitur yang pada umumnya ada di dalam mikrokontroler adalah sebagai berikut:
A. RAM (Random Access Memory)
RAM digunakan oleh mikrokontroler untuk tempat penyimpanan variable. Memori ini bersifat volatile yang artinya akan kehilangan semua datanya jika tidak mendapatkan catu daya.
B. ROM (Read Only Memory)
ROM disebut juga sebagai kode memori karena berfungsi untuktempat penyimpanan program yang akan diberikan oleh user.
C. Register
Register merupakan tempat penyimpanan nilai-nilai yang akan digunakan dalam proses yang telah disediakan oleh mikrokontroler.
D. Special Function Register
Merupakan register khusus yang berfungsi untuk mengaru jalanya mikrokontroler dan register ini terletak di RAM.
E. Input dan output Pin
Pin Input adalah bagian yang berfungsi sebagai penerima signal dari luar dan pin ini dihubungkan ke berbagai media inputan seperti keypad, sensor, keyboard, dan sebagainya. Pin Output adalah bagian yang berfungsi untuk mengeluarkan signal dari hasil proses algoritma mikrokontroler.
F. Interrupt
Interrupt merupakan bagian dari mikrokontroler yang berfungsi sebagai bagian yang dapat melakukan interupsi, sehingga ketika program sedang dijalankan, program interupsi terlebih dahulu.
Menurut Malik dan Mohammad Unggul Junawa (2009:3), ada beberapa interrupt yang terdapat pada mikrokontroler adalah sebagai berikut:
1. Interrupt Eksternal
Interrupt ini akan terjadi ketika ada inputan dari pin interrupt.
2. Interrupt Timer
Interrupt ini akan terjadi ketika waktu tertentu telah tercapai.
3. Interrupt Serial
Interrupt ini akan terjadi ketika ada penerimaan data dari komunikasi serial.
2.2.2. Mikrokontroler ATmega 32u4
1. Arsitektur Mikrokontroler ATmega 32u4
Sebagai salah satu vendor besar didunia ini, ATMEL mengeluarkan AT mega 32u4 yang merupakan salah satu mikrokontroler yang banyak digunakan. Mikro AT mega 32u4 memiliki kompabilitas penuh dengan keluarga MCS-51 lain, terutama pada bagian pemprogramannya dan mampu deprogram secara In System Programing (ISP).
Mikrokontroler ATmega 32u4 memiliki beberapa kriteria standard yaitu memiliki 32 KB Flash Memory 1 KB EEPROM yang dapat di program ulang sekitar 1000 kali write atau erase cycle, 2,5 KB SRAM, 26 jalur I/O, analog comparator, dua buah 8 bit timer/counter, dengan arsitektur lima vector, empat level interrupt, full duplex serial port, cystal oscillator dan cystal timer/counter.
Mikrokontroler ATmega 32u4 beroprasi pada frekuensi clock sampai 8 Mhz. ATmega 32u4 memiliki dua power saving mode yang dapat dikontrol melalui software, yaitu idle mode dan power down mode. Pada idle mode, CPU tidak aktif sedangkan isi RAM tetap dipertahankan dengan timer/counter, serial port, dan interrupt system tetap berfungsi. Pada power down mode, isi RAM akan disimpan tetapi osilatornya tidak akan berfungsi sehingga semua fungsi dari chip akan berhenti sampai mendapat reset secara hardware.
2. Konfigurasi Pin ATmega 32u4
Mikrokontroler merupakan sebuah processor yang digunakan untuk kepentingan control. Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama. Seperti umumya komputer, mikrokontroler adalah alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya, artinya bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer.
Program ini mengintruksikan komputer untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer konfigurasi pin ATmega 32u4 dapat
dilihat pada gambar berikut:
Gambar 2.4. Konfigurasi pin AT mega32u4
Sumber: <a href="http://datasheetdir.com">http://datasheetdir.com</a>
3. Fitur Mikrokontroler ATmega32u4
ATmega 32u4 adalah mikrokontroler keluaran dari ATMEL yang mempunyai arsitektur RISC ( Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroler ini memiliki beberapa fitur antara lain:
1. Dimensi 6,1 cm(p), 5,75 cm(l), 1,8 cm(t)
2. Memiliki SRAM internal 2,5 KB
3. 1 kanal USART, SPI, 12C, JTAG, USB device
4. Bekerja pada level tegangan 3,3VDC-5,5VDC
5. Catu daya dapat melalui bus power(usb) ataupun dari catu daya eksternal 5VDC
6. Terintegrasi cystal ocilator dengan frekuensi 8Mhz
7. Pemprograman dapat melalui ISP port ataupun mini usb port (bootlaoder)
8. 32 KB flash memory.
Untuk mengetahui alur hubungan dari architecture ATmega 32u4 dapat dilihat pada gambar berikut:
Gambar 2 .5. Arsitektur ATmega328
( Sumber: <a href="http://duinoworks.bakketti.com/">http://duinoworks.bakketti.com/</a> )
2.2.3. Konsep Dasar Sensor Kelembapan (Humidity)
Kelembapan adalah salah satu faktor yang menetukan kondisi cuaca pada suatu daerah. Kelembapan sendiri dapat diukur dengan berbagai macam metode, salah satunya adalah dengan menggunakan sensor kelembapan (humidity).
A. Jenis kelembapan ada dua faktor yaitu:
1. Kelembapan Absolut
Bilangan yang menunjukan berapa gram uap air yang tergantung dalam satu meter kubik udara
2. Kelembapan relative
Bilangan yang menunjukan berapa persen perbandingan antara uap air yang ada dalam udara saat pengukuran dan jumlah uap air maksimum yang dapat ditampung oleh udara tersebut.
B. Jenis kelembapan sensor terdiri dari beberapa bagian sebagai berikut:
1. Capacitive Sensors
Sebuah kapasitor air-filled/terisi-udara dibuat sebagai suatu sensor kelembaban relative karena uap dalam atmosfer merubah permivitas elektrik udara.
Sebuah kapasitor air-filled/terisi-udara dibuat sebagai suatu sensor kelembaban relative karena uap dalam atmosfer merubah permivitas elektrik udara.
Gambar 2.6. Konfigurasi Capacitive sensors
2. Electrical Conductivity Sensors
Sensor kelambapan konduktivitas adalah disebut dengan “Pope element”, yang terdiri dari polystyrene yang
Gambar 2.7. Konfigurasi Electrical Conductivity Sensors
dilakukan/diperlakukan dengan asam sulfur untuk memperoleh karakteristik surface-resistivitas yang diinginkan.
3. Thermal Conductivity Sensors
Penggunaan konduktivitas thermal dari gas untuk mengukur kelembapan dapat diukur oleh sebuah sensor thermistor.
Gambar 2.8. Konfigurasi Thermal conductivity sensors
2.2.4. Arduino Uno Board 1.0
Arduino dikatakan sebagai sebuah platform dari physical computing yang bersifat open source. Pertama yang perlu dipahami bahwa kata “platform” ini adalah sebuah pilihan kata yang tepat. Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi kombinasi dari hardware, bahasa pemprograman dan Integrated Development Environment (IDE) yang berteknologi. IDE adalah sebuah software yang sangat berperan untuk menulis program, compile menjadi kode biner dan meng-upload kedalam memory mikrokontroler.
Menurut Feri Djunandi (2011:8), “Komponen utama didalam papan Arduino adalah sebuah mikrokontroler 8 bit dengan merk ATmega yang dibuat oleh Atmel Corporation. Berbagai papan Arduino menggunakan tipe ATmega yang berbeda-beda tergantung dari spesifikasinya, sebagai contoh Arduino Uno menggunakan ATmega 328 sedangkan Arduino Mega 2560 yang lebih canggih menggunakan ATmega 2560”.
Dibawah ini adalah contoh diagram blok sederhana dari mikrokontroler ATmega 32u4 yang dipakai pada Arduino Uno sebagai berikut:
UART (Anar Muka Serial)
2KB RAM 32 KB RAM
Flash Memori
(Program)
(Memori kerja)
1KB
EEPROM
CPU
Port Input / Output
Gambar 2.9. Diagram Blok Arduino Uno
Sumber : E-Book Pengenalan Arduino Feri Djuandi (2011:8)
Blok-blok diagram dari pengenalan Arduino Uno 1.0 dijelaskan sebagai berikut:
1. Universal Asychronus Reseirve/Transmiter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-442, dan RS-485.
2. 2KB RAM pada memori kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel didalam program.
3. 32KB RAM flash memori bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memori juga menyimpan bootlander. Bootlander adalah program inisiasi yang ukurnanya kecil, dijalankan oleh CPU saat dayanya hidup. Setelah bootlander selesai dijalankan, berikutnya program didalam RAM akan dieksekusi.
4. 1KB EEPROM bersifat non-volatile , digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papa Arduino Uno 1.0.
5. Central Processing Unit (CPU), bagian mikrokontroler untuk menjalankan setiap instruksi dari program.
6. Port Input dan Output, pin-pin untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
2.2.5. Bagian-Bagian Arduino Uno 1.0
Setelah mengenal bagian-bagian utama dari mikrokontroler ATmega 32u4 sebagai komponen utama, selanjutnya menjelaskan tentang bagian-bagian dari papan Arduino itu sendiri.
Gambar 2.10. Bagian-bagian Arduino Uno Board
Sumber: E-Book Pnegenalan Arduino Feri Djuandi (2009:9)
Bagian-bagian komponen dari Arduino Uno board dapat dijelaskan sebagai berikut:
A. 14 pin input/output digital (0-13)
Berfungsi sebagai input atau output, dapat diatur oleh program. Khusus untuk 6 buah pin 3, 5, 6, 9, 10, dan 11, dapat juga berfungsi sebagai pin analog output dimana tegangan outputnya dapat diatur. Nilai sebuah pin output analog dapat deprogram antara 0-255, dimana hal itu mewakili nilai tegangan 0-5 V.
B. USB
Berfungsi untuk:
§ Memuat program dari komputer ke dalam papan.
§ Komunikasi serial antara papan dan komputer.
§ Mmeberi daya listrik ke papan.
C. Sambungan SV1 B
Sambungan atau jumper untuk memilih sumber daya papan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan lagi pada papan Arduino versi terakhir karena pemilihan sumber daya eksternal atau USB dilakukan secara otomatis.
D. Q1-Kristal (Quartz crystal oscillator)
Jika mikrokontroler dianggap sebagai sebuah otak, maka Kristal adalah janttungnya karena komponen ini menghasilkan detak-detak yang dikirim kepada mikrokontroler agar melakukan sebuah operasi untuk setiap detaknya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16 MHz).
E. Tombol Reset S1
Untuk menreset mikrokontroler sehingga program akan mulai lagi dari awal. Perhatikan bahwa tombol reset ini bukan untuk menghapus program atau mengosongkan mikrokontroler.
F. IC 1-Mikkontroler ATmega
Komponen utama dari papan Arduino, didalamnya terdapat CPU, ROM dan RAM.
G. X1-Sumber Daya Eksternal
Jika hendak disuplai dengan sumber daya eksternal, Arduino dapat diberikan tegangan DC antara 9-12 V.
H. 6 pin input analog (0-5)
Pin ini sangat berguna untuk membaca tegangan yang dihasilakn oleh sensor analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input antara 0-1-23, dimana hal itu mewakili nilai tagangan 0-5V.
2.2.6. Komponen Dasar Elektronika
1. Definisi Elektronika
Menurut Rusmadi (2009:10), Komponen elektronika terbagi menjadi 2 bagian yaitu:
1. Komponen Pasif
Menurut Rusmadi (2009:10), “Komponen pasif adalah komponen-komponen elektronika yang apabila dialiri aliran listrik tidak menghasilkan tenaga seperti: perubahan tegangan, pembalikan fasa, penguatan dan lain-lain”. Ada beberapa komponen yang termasuk dalam komponen pasif diantaranya adalah sebagai berikut:
A. Resistor atau Tahanan
B. Kapasitor atau Kondensator
C. Trafo atau Transformator
2. Komponen Aktif
Menurut Rusmadi (2009:33), Komponen aktif adalah komponen yang apabila dialiri aliran listrik akan menghasilkan sesuatu tenaga baik berbentuk penguatan maupun mengatur aliran listrik yang melaluinya”.
Ada beberapa yang termasuk komponen aktif antara lain adalah sebagai berikut:
A. Dioda
B. Transistor
C. IC (Integrated Circuit)
D. Thyristor atau SCR (Silicon Controller Reciefer).
2.2.7. Konsep Dasar Driver Motor DC IC L293D
1. Definisi Driver Motor DC IC L293D
IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL mupun mikrokontroler motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena didalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri denagn kemampuan mengalirkan arus 1 ampere tiap driver. Sehingga dapat digunakan untuk membuat driver h-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC L293D dapat dilihat pada gambar 2.5 sebagai berikut:
Gambar 2.11.
Konstruksi pin dan rangkaian driver motor DC IC L293D
(Sumber: http//chaokhun.kmitl.ac.th)
Fungsi pin driver motor DC IC L293D, terdiri dari beberapa pin yaitu:
A. Pin EN (Enabl, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk mengerkan motor DC.
B. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
C. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC.
D. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian control driver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
E. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapt dihubungkan ke sebuah pendingin kecil.
2. 2 . 8 . Konsep Dasar Motor Servo
1. Definisi Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada
motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.
Gambar 2 . 12 . Bentuk fisik motor servo standar
Sumber: <a href="http://elektronika-dasar.web.id">http://elektronika-dasar.web.id</a>
Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan
memberikan variasi lebar pulsa (duty cycle) sinyal PWM padabagianpinkontrolnya.
1. Jenis motor servo
A. Motor servo standar 180° Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
B. Motor servo continuous Motor servo jenis ini mampu bergerak dua arah (CWdan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Pulse kontrol motor servo operasional motor servo dikendalikan oleh sebuah pulse selebar ± 20 ms, dimana lebar pulse antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulse dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulse kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulse lebih dari 1.5 ms maka posisi mendekati 180°.
Gambar pulse kendali motor servo dapat dilihat pada gambar 2.2 sebagaiberikut:
Gambar 2.13. Pulsa kendali motor servo
Sumber: http://trikueni-desainsistem.blogspot.com/2014/03/Pengertian-Motor-Servo.html
Motor servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Tonduty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam ( Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.2.9. Konsep Dasar Lampu led
1. Definisi Lampu led
Lampu LED atau kepanjangannya (light emitting diode) adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki fungsi untuk menunjukkan status dari perangkat elektronika tersebut. Misalnya pada sebuah komputer, terdapat lampu LED power dan led indikator untuk processor, atau dalam monitor terdapat juga lampu ledpower dan power saving. Lampu led terbuat dari plastik dan dioda semikonduktor yang dapat menyala apabila dialiri tegangan listrik rendah (sekitar 1.5 volt DC). Bermacam-macam warna dan bentuk dari lampu led, disesuaikan dengan kebutuhan dan fungsinya.
Bentuk fisik dari lampu led dapat dilihat pada gambar 2.12 sebagai berikut:
Gambar 2 . 14 . Lampu led
Sumber : diambil dari spedaontel.wordpress.com
A. Fungsi lampu led
<a href="http://usmanft.blogspot.com/2006/05/led-sebagai-sumber-cahaya-masa-depan.html" target="_blank">Led (light emitting diode)</a> merupakan sejenis lampu yang akhir-akhir ini muncul dalam kehidupan kita. Led dulu umumnya digunakan pada gadget seperti ponsel serta komputer. Sebagai pesaing lampu bohlam dan neon, saat ini aplikasinya mulai meluas dan bahkan bisa kita temukan pada korek api yang kita gunakan, lampuemergency dan sebagainya. Led sebagai model lampu masa depan dianggap dapat <a href="http://netsains.com/2008/02/menekan-pemanasan-global-dengan-lampu-led/" target="_blank">menekan pemanasan global</a> karena efisiensinya.
2.2.10. Konsep Dasar Resistor
1. Definisi Resistor
Resistor atau tahanan adalah salah satu komponen elektronika yang berfungsi untuk mengatur serta menghambat arus listrik. Resistor adalah komponen dasar elektronika yang dipergunakan untuk membatasi jumlah arus yang mengalir dalam suatu rangkaian. Sesuai dengan namanya resistor bersifat resistif dan biasanya komponen ini terbuat dari bahan karbon. Berdasarkan hokum Ohm bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya. Satuan resistansi dari suatu resistor disebut Ohm atau dilambangkan dengan simbol W(Omega ).
Untuk menghitung hambatan pada resistor dapat menggunakan rumus sebagai berikut:
Keterangan :
V = tegangan listrik (volt )
I = arus yang mengalir (ampere)
R = tahanan (ohm)
Untuk mengetahui nilai resistor berdasarkan warnanya dapat dilihat pada table 2.1 sebagai berikut:
Tabel 2.3. Tabel baca resistor
Sumber : Rusmadi (2009:13)
Penjelasan dari kode warna resistor pada gambar 2.13 sebagai berikut:
· Kode I, menyatakan angka ke satu
· Kode II, menyatakan angka ke dua
· Kode III, menyatakan faktor pengali
· Kode IV, menyatakan nilai toleransi atau batas antara nilai tahanan terbesar dengan nilai tahanan yang terkecil.
Misalkan diketahui warna tahanan terdiri dari merah-hijau-orange-emas, berarti nilai resistansinya = 25.000 ohm ±5% = 25 K ohm ±5%.
Nilai maksimal dari resistansinya = 25.000 + (25.000 X 5%) = 26.250 ohm.
Nilai maksimal dari resistansinya = 25.000 - (25.000 X 5%) = 26.250 ohm.
Menurut macamnya resistor terbagi atas dua macam yaitu:
1. Resistor Tetap ( Fixed Resistor)
Resistor tetap adalah resistor yang memiliki nilai hambatan yang tetap tidak dapat diubah-ubah. Apabila nilai tahanannya semakin besar, maka arus semakin kecil. Sebaliknya bila nilai tahanannya kecil, maka arus yang mengalir semakin besar. Resistor memiliki batas kemampuan daya misalnya : 1/16 watt, 1/8 watt, ¼ watt, ½ watt.
Artinya resitor hanya dapat dioperasikan dengan daya maksimal sesuai dengan kemampuan dayanya. Adapun resistor tidak tetap dapat dilihat pada gambar 2.14.
Gambar 2 . 15 . Bentuk fisik dan simbol resistor tetap
2. Resistor Tidak Tetap (Variable Resistor)
Ialah resistor yang nilai hambatannya atau resistansinya dapat diubah-ubah. Jenisnya antara lain : hambatan geser, trimpot dan potensiometer. Yang banyak digunakan ialah trimpot dan potensimeter.
B. Tahanan Variabel adalah jenis tahanan yang resistansinya bisa diubah-ubah, seperti Potensiometer dengan cara diputar dan Trimpot (trimer potensiometer).
C. LDR (Light Dependent Resistance) adalah tahanan yang nilai resistansinya dipengaruhi oleh cahaya, nilai tahananya akan mengecil apabila terkena cahaya dan membesar apabila tidak terkena cahaya.
D. NTC ( negative thermal coeffisien )dan PTC (positive thermal coeffisien) adalah jenis tahanan yang nilai tahanannya dipengaruhi oleh perubahan suhu. NTC pada suhu yang tinggi nilai tahanannya turun dan pada suhu yang rendah nilai tahananya naik, sedangkan PTC kebalikannya pada suhu yang tinggi nilai tahanannya naik dan pada suhu yang rendah nilai tahanannya turun.
Adapun resistor tidak tetap dapat dilihat seperti pada gambar 2.15 sebagai berikut:
Gambar 2.16. Bentuk fisik dan simbol resistor tidak tetap
2.2.11. Konsep Dasar Kapasitor
1. Definsi Kapasitor
Kapasitor adalah komponen elektronika yang mempunyai kemampuan menyimpan electron-elektron selama waktu yang tidak tertentu. Kapasitor berbeda dengan akumulator dalam menyimpan muatan listrik terutama tidak terjadi perubahan kimia pada bahan kapasitor, besarnya kapasitansi dari sebuah kapasitor dinyatakan dalam farad.
Pengertian lain kapasitor adalah komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas, elektrolit dan lain-lain.
Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutup negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutup positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini “tersimpan” selama tidak ada konduksi pada ujung-ujung kakinya. Kemampuan untuk menyimpan muatan listrik pada kapasitor disebuat dengan kapasitansi atau kapasitas.
Untuk melihat kontruksi dari kapasitor, dapat dilihat pada gambar 2.16 sebagai berikut:
Gambar 2 .1 7 . Susunan lapisan kapasitor
Sumber: <a href="http://elektronika-dasar.web.id">http://elektronika-dasar.web.id</a>
Kapasitansi didefenisikan sebagai kemampuan dari suatu kapasitor untuk dapat menampung muatan elektron. Coulombs pada abad 18 menghitung bahwa 1 coulomb = 6.25 x 1018 elektron. Kemudian Michael Faraday membuat postulat bahwa sebuah kapasitor akan memiliki kapasitansi sebesar 1 farad jika dengan tegangan 1 volt dapat memuat muatan elektron sebanyak 1 coulombs. Dengan rumus dapat ditulis :
Q = CV
Dimana :
Q = muatan elektron dalam C (coulomb)
C = nilai kapasitansi dalam F (farad)
V = besar tegangan dalam V (volt)
Dalam praktek pembuatan kapasitor, kapasitansi dihitung dengan mengetahui luas area plat metal (A), jarak (t) antara kedua plat metal (tebal dielektrik) dan konstanta (k) bahan dielektrik. Dengan rumusan dapat ditulis sebagai berikut :
C = (8.85 x 10-12) (k A/t)
Contoh konstanta (k) dari beberapa bahan dielektrik yang disederhanakan dapat dilihat pada tabel 2.2 sebagai berikut:
|
Udara vakum |
K=1 |
|
Aluminium |
K=8 |
|
Keramik |
K=100-1000 |
|
Gelas |
K=8 |
|
Polyethylene |
K=3 |
Tabel 2.4. Bahan dielektrik yang di sederhanakan
a. Prinsip Pembentukan Kapasitor
1. Jika dua buah plat atau lebih yang berhadapan dan dibatasi oleh isolasi, kemudian plat tersebut dialiri listrik maka akan terbentuk kondensator (isolasi yang menjadi batas kedua plat tersebut dinamakan dielektrikum).
2. Bahan dielektrikum yang digunakan berbeda-beda sehingga penamaan kapasitor berdasarkan bahan dielektrikum. Luas plat yang berhadapan bahan dielektrikum dan jarak kedua plat mempengaruhi nilai kapasitansinya.
3. Pada suatu rangkaian yang tidak terjadi kapasitor liar. Sifat yang demikian itu disebutkan kapasitansi parasitic. Penyebabnya adalah adanya komponen-komponen yang berdekatan pada jalur penghantar listrik yang berdekatan dan gulungan-gulungan kawat yang berdekatan.
Gambar 2.18. Lapisan dalam kapasitor
Sumber: <a href="http://elektronika-dasar.web.id">http://elektronika-dasar.web.id</a>
Gambar 2.17 diatas menunjukan bahwa ada dua buah plat yang dibatasi udara. Jarak kedua plat dinyatakan sebagai d dan tegangan listrik yang masuk. Besaran Kapasitansi Kapasitas dari sebuah kapasitor adalah perbandingan antara banyaknya muatan listrik dengan tegangan kapasitor dapat ditulis menggunakan rumus sebagai berikut: C = Q / V.
Jika dihitung dengan rumus C= 0,0885 D/d. Maka kapasitasnya dalam satuan piko farad. D = luas bidang plat yang saling berhadapan dan saling mempengaruhi dalam satuan cm2. D=jarak antara plat dalam satuan cm. Bila tegangan antara plat 1 volt dan besarnya muatan listrik pada plat 1 coulomb, maka kemampuan menyimpan listriknya disebut 1 farad. Dalam kenyataannya kapasitor dibuat dengan satuan dibawah 1 farad. Kebanyakan kapasitor elektrolit dibuat mulai dari 1 mikrofarad sampai beberapa milifarad.
b. Jenis-jenis kapasitor sesuai bahan dan konstruksinya.
Kapasitor seperti juga resistor nilai kapasitansinya ada yang dibuat tetap dan ada yang variabel. Kapasitor dielektrikum udara, kapasitansinya berubah dari nilai maksimum ke minimum. Kapasitor variabel sering kita jumpai pada rangkaian pesawat penerima radio dibagian penala dan osilator. Agar perubahan kapasitansi di dua bagian tersebut serempak maka digunakan kapasitor variabel ganda. Kapasitor variabel ganda adalah dua buah kapasitor variabel dengan satu pemutar. Berdasarkan dielektrikum kapasitor dibagi menjadi beberapa jenis, antara lain:
1. kapasitor keramik
2. kapasitor film kapasitor elektrolit
3. kapasitortantalum
4. kapasitor kertas
Berdasarkan polaritas kutup pada elektroda kapsitor dapat dibedakan dalam 2 jenis yaitu :
1. Kapasitor Non-Polar, kapasitor yang tidak memiliki polaritas pada kedua elektroda dan tidak perlu dibedakan kaki elektrodanya dalam pesangannya pada rangkaian elektronika.
2. Kapasitor Bi-Polar, yaitu kapasitor yang memiliki polaritas positif dan negatif pada elektrodanya, sehingga perlu diperhatikan pesangannya pada rangkaian elektronika dan tidak boleh terbalik. Kapasitor elektrolit dan kapasitor tantalum adalah kapasitor yang mempunyai kutub atau polar, sering disebut juga dengan nama kapasitor polar. Kapasitor film terdiri dari beberapa jenis yaitu polyester film, poly propylene film.
2.2.12. Konsep Dasar IC Regulator
1. Definisi IC Regulator
Salah satu tipe regulator tegangan tetap adalah 78XX. Regulator tegangan tipe 78XX adalah salah satu regulator tegangan tetap dengan tiga terminal, yaitu terminal VIN, GND dan VOUT. Tegangan keluaran dari regulator 78XX memungkinkan regulator untuk dipakai dalam sistem logika, instrumentasi dan Hifi. Regulator tegangan 78XX dirancang sebagai regulator tegangan tetap, meskipun demikian dapat juga keluaran dari regulator ini diatur tegangan dan arusnya melalui tambahan komponen eksternal. Pada umumnya catu daya selalu dilengkapi dengan regulator tegangan. Tujuan pemasangan regulator tegangan pada catu daya adalah untuk menstabilkan tegangan keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari regulator tegangan adalah untuk perlindungan dari terjadinya hubung singkat pada beban.
Untuk melihat karakteristik regulator tegangan positif 78xx dapat dilihatpadatabel2.3sebagaiberikut:
Tabel 2. 5 . Karakteristik IC regulator tegangan positif 78xx
Sumber:http://elektronika-dasar.web.id
Angka xx pada bagian terakhir penulisan tipe regulator 78xx merupakan besarnya tegangan output dari regulator tersebut. Kemudian huruh L, M merupakan besarnya arus maksimum yang dapat dialirkan pada terminal outputregulator tegangan positif tersebut. Untuk penulisan tanpa huruf L ataupun M (78(L/M)xx) pada regulator tegangan positif 78xx maka arus maksimal yang dapat dialirkan pada terminal outputnya adalah 1 ampere. Karakteristik dan tipe-tipe kemampuan arus maksimal output dari regulator tegangan positif 78xx dapat dilihat pada tabel diatas. Kode huruf pada bagian depan penulisan tipe regulator 78xx merupakan kode produsen (AN78xx, LM78xx, MC78xx) regulator tegangan positif 78xx.
Cara pemasangan dari regulator tegangan tetap 7805 pada catu daya dapat dilihat pada gambar 2.21 sebagai berikut.
Gambar 2.19. Rangkaian dasar ICregulator tegangan
positif78xx
Sumber: <a href="http://elektronika-dasar.web.id">http://elektronika-dasar.web.id</a>
1. Penggunaan IC regulator dalam rangkaian
IC 7805 merupakan IC peregulasi, dimana IC 7805 bekerja pada sumber arus searah yang menghasilkan keluaran 5 volt sedangkan pada rangkaian IC ini digunakan untuk memaksa keluaran yang kita berikan diatas 5 volt menjadi 5 volt dengan hasil positif, sesuai dengan data IC 7805 bekerja efektif antara range 7V-20V. IC 7805 terdapat beberapa macam mulai dari komponen SMD (surface mount device) sampai aplikasi umum dengan keluaran arus sampai dengan 1A.
Gambar 2.20. Rangkaian IC regulator
2.2.13. Konsep Dasar Transistor
1. Definisi Transistor
Transistor merupakan komponen dengan fungsi bermacam-macam. Komponen ini dapat berfungsi seperti layaknya keran air. Arus yang dialirkan bisa diatur secara elektronis. Berdasarkan kategori, ada transistor yang tergolong sebagai PNP dan ada pula yang termasuk sebagai NPN. N dan P menyatakan tipe semikonduktor yang digunakan. Pada PNP, dua lapis semikonduktor tipe-p mengapit satu lapis semikonduktor tipe n. Pada NPN, dua lapis semikonduktor tipe-n mengapit satu lapis semikonduktor tipe-p.
Berikut ini adalah gambaran komponen dan simbol transistor:
Gambar 2.21. Komponen dan simbol
Fungsi transistor dalam dunia elektronika mempunyai peranan yang sangat penting, berikut ini beberapa fungsi transistor:
a. Sebagai sebuah pneguat (amplifier)
b. Sirkuit pemutus dan penyambung (switching)
c. Stabilisasi tegangan (stabilisator)
d. Sebagai perata arus
e. Menahan sebagian arus
f. Menguatkan arus
g. Membangkitkan frekuensi rendah maupu tinggi
h. Modulasi sinya dan berfungsi lainnya.
Dalam rangkaian analog, transistor digunakan dalam amplifier (penguat).Rangkaian analog ini meliputi pengeras suara, sumber listrikstabil, dan penguat sinyal radio.Dalam rangkaian-rangkaian digital, transistor digunakan sebagai saklar berkecepatan tinggi.Beberapa diantara transistor dapat juga dirangkai sedemikian rupa, sehingga fungsi transistor menjadi sebagai logic gate, memori, dan komponen lainnya.
2.2.14. Konsep Dasar Diode
1. Definisi Diode
Merupakan komponen diode biasa digunakan sebagai penyearah arus karena sifatnya yang hanya melewatkan arus secara searah dan menahan arus sebaliknya. Untuk dapat memahami bagaimana cara kerja dioda pada rangkaian Elektronik kita dapat meninjau 3 situasi sebagai berikut ini yaitu:
1. Diode diberi tegangan nol
2. Diode diberi tegangan negative
3. Diode diberi tegangan positive
A. DiodaDiberiTeganganNol
Ketika dioda diberi tegangan nol maka tidak ada medan listrik yang menarikelektron dari katoda. Elektron yang mengalami pemanasan pada katoda hanya mampu melompat sampai pada posisi yang tidak begitu jauh dari katoda dan membentuk muatan ruang (Space Charge). Tidak mampunya elektron melompat menuju katoda disebabkan karena energi yang diberikanpada elektron melalui pemanasan oleh heater belum cukup untukmenggerakkan elektron menjangkau plate.
B. Dioda Diberi Tegangan Negative
Ketika diode diberi tegangan negative, maka potensial negative yang ada pada plate akan menolak electron yang sudah membentuk muatan ruang sehingga electron tersebut tidak akan dapat mengjangkau plate sebaliknya akan terdorong kembali ke katoda, sehingga tidak aka nada arus yang mengalir.
C. Dioda Diberi Tegangan Positive
Ketika diode diberi tegangan positif maka, potensial positif yang ada pada plate akan menarik electron yang baru saja terlepas dari katoda oleh karena
emisi thermionic, pada situasi inilah arus listrik baru akan terjadi. Seberapa besar arus listrik yang akan mengalir tergantung dari pada besarnya tegangan
positif yang dikenakan pada plate. Semakin besar tegangan plate akan semakin besar pula arus listrik yang akan mengalir.
Oleh karena sifat dioda yang seperti ini yaitu hanya dapatmengalirkan arus listrik pada situasi tegangan tertentu saja, maka dioda dapat digunakan sebagai
penyearah arus listrik (rectifier). Pada kenyataannya memang dioda banyak digunakan sebagai penyearah tegangan AC menjadi tegangan DC pada rangkaian
Elektronik.
2. Karakteristik Dioda
Hampir semua peralatan Elektronika memerlukan sumber arus searah. Penyearah digunakan untuk mendapatkan arus searah dari suatu arus bolak-balik. Arus atau
tegangan tersebut harus benar-benar rata tidak boleh berdenyut-denyut agar tidak menimbulkan gangguan bagi peralatan yangdicatu.
Dioda sebagai salah satu komponen aktif sangat popular digunakan dalam rangkaian Elektronika, karena bentuknya sederhana dan penggunaannya sangat luas. Ada
beberapa macam rangkaian dioda, diantaranya : penyearah setengah gelombang (Half-Wave Rectifier), penyearah gelombang penuh (Full-Wave Rectifier),
rangkaian pemotong (Clipper), rangkaian penjepit (Clamper) maupun pengganda tegangan (Voltage Multiplier). Di bawah ini merupakan gambar yang
melambangkandioda penyearah.
Sisi Positif (P) disebut Anoda dan sisi Negatif (N) disebut Katoda. Lambang dioda seperti anak panah yang arahnya dari sisi P ke sisi N. Karenanya ini
mengingatkan kita pada arus konvensional dimana arus mudah mengalir dari sisi P ke sisi N.
Dan berikut gambar dari karakteristik diode:
Gambar 2.22. Karakteristik diode
Berikut ini adalah penjelasan macam Dioda sebagai berikut:
1. Dioda Standar
Dioda jenis ini ada dua macam yaitu silikon dan germanium. Dioda silikon mempunyai tegangan maju 0.6V sedangkan dioda germanium 0.3V. Dioda jenis ini mempunyai beberapa batasan tertentu tergantung spesifikasi. Batasan batasan itu seperti batasan tegangan reverse, frekuensi, arus, dan suhu. Tegangan maju dari dioda akan turun 0.025V setiap kenaikan 1 derajat dari suhu normal.
2. Dioda Rectifier
Rectifier berfungsi sebagai penyearah Arus ( AC ke DC ). Biasanya Rectifier lebih dikenal sebagai Dioda karena penyearah arus ialah fungsi dasar dari
dioda, tetapi lebih spesifik lagi merupakanfungsidarirectifier.
3. Dioda Kiprok
Kiprok berfungsi untuk regulator tegangan yang biasa digunkan padakendaraanbermotor.Maka jika arus 12 volt maka arus akan tetap stabil menjadi 12 volt
meskipun arus naik. Namun memiliki ampere yang berbeda-beda. sebenarnya tidak ada bedanya dengan Rectifier namun kiprok adalah gabungan komponen tambahan
sebagai penyetabil tegangan. Sehingga bila tunggangan tak dilengkapi aki, bohlam lampu pada sepeda motor tidak cepat putus.
4. Dioda Selenium
Disebut dioda selenium karena banyak terbuat dari selenium. Dioda ini memiliki keandalan yang tinggi & mampu dialiri tegangan arus listrik yang cukup
tinggi. Biasanya dipergunakan sebagai perata dalam rangkaian power supply. Dioda selenium dirancang memiliki 4 kaki; 2 kaki diantaranya merupakan bagian
inputnya tegangan arus AC & 2 kaki lainnya sebagai output yang diberi tanda (+) & (-) yang menghasilkan arus DC.
5. Dioda Zener
Dioda zener adalah diode yang berfungsi sebagai penstabil tegangan. Selain itu dioda zener juga dapat dipakai sebagai pembatas tegangan pada level tertentu
untuk keamanan rangkaian. Karena kemampuan arusnya yang kecil maka pada penggunaan dioda zener sebagai penstabil tegangan untuk arus besar diperlukan
sebuah buffer arus. Dioda zener dibias mundur (reverse).
Beberapa fungsi diode adalah sebagai berikut:
1. Penyearah,contoh:diodabridge.
2. Penstabil tegangan (voltage regulator), yaitu dioda zener.
3. Pengaman/sekering.
4. Sebagairangkaian clipper, yaitu untukmemangkas/membuang level sinyal yang ada di atas atau di bawah level tegangan tertentu.
5. Sebagai rangkaian clamper, yaitu untuk menambahkan komponen dc kepada suatu sinyal ac.
6. Penggandategangan.
7. Sebagai indikator, yaitu LED (light emiting diode).
8. Sebagai sensor panas, contoh aplikasi pada rangkaian power amplifier.
9. Sebagai sensor cahaya, yaitu dioda photo.
10. Sebagai rangkaian VCO (voltage controlled oscilator), yaitu dioda varactor.
2.2.15. Konsep Dasar Elisitasi
1. Definisi Elisitasi
Menurut Guritno, Sudaryono dan Untung Rahardja (2010:302), “Elisitasi (elicitation) berisi usulan rancangan sistem baru yang diinginkan oleh pihak manajemen terkait dan disanggupi oleh penulis untuk dieksekusi”.
2. Jenis-jenis Elisitasi
Menurut Guritno, Sudaryono dan Untung Rahardja(2010:302), “Elisitasi didapat melalui metode wawancara dan dilakukan melalui tiga tahap, yaitu sebagai berikut:
A. Elisitasi Tahap I
Berisi seluruh rancangan sistem baru yang diusulkan oleh pihak manajemen terkait melalui proses wawancara.
B. Elisitasi Tahap II
Merupakan hasil pengklasifikasian dari elisitasi tahap I merode berdasarkan MDI. Metode MDI bertujuan untuk memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi untuk dieksekusi.
· M pada MDI itu artinya Mandatory. Maksudnya requiretment tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
· D pada MDI adalah Desirable. Maksudnya requirement
Tesebut tidak terlalu penting dan boleh dihilangkan, tetapi jika requirement tersebut digunakan dalam pembentukan sistem, akan membuat sistem tersebut lebih sempurna.
· I pada MDI adalah Inessential. Maksudnya bahwa requirement tersebut bukanlah bagian dari sistem yang dibahas dan merupakan bagian luar sistem.
C. Elisitasi Tahap III
Merupakan hasil penyusutan dari elisitasi tahap II dengan cara mengliminasi semua requirement yang optionnya I pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali melaui metode TOE.
§ T adalah Technical, artinya bagaimana tata cara/teknik pembuatan requirement tersebut dalam sistem yang diusulkan.
§ O adalah Operasional, artinya bagaimana tata cara pengguna requirement tersebut dalam sistem yang akan dikembangkan.
§ E adalah Economic, artinya berapakah biaya yang diperlukan guna membangun requirement tersebut didalam sistem.
D. Final Draft Elisitasi
Final draft merupakan hasil akhir yang dicapai dari suatu proses elisitasi yang dapat digunakan sebagai dasar pembuatan suatu sistem yang akan dikembangkan.
2.2.16. Konsep Dasar Literrature Review
1. Definisi Literatur Review
Menurut Guritno, Sudaryono dan Untung Rahardja (2010:86) “Literratur Review dalam suatu penelitian adalah mengetahui apakah para peneliti lain telah menemukan jawaban untuk pertanyaann-pertanyaan penelitian yang kita rumuskan jika dapat menemukan jawaban pertanyaan penelitian tersebut dalam berbagai pustaka atau laporan hasil penelitian yang paling actual, maka kita tidak perlu melakukan penelitian yang sama.
2.3. Literatur Review
Beberapa Literatur Riview tersebut adalah sebagai berikut:
1. Penelitian yang dilakukan oleh Noveri (2012) dari Perguruan Tinggi Raharja yang berjudul “Data logger sensor suhu berbasis Mikrokontroler ATmega 8535 dengan PC sebagai tampilan”.
2. Penelitian yang dilakukan oleh Nugroho Adi Hatmanto (2010) dari Perguruan Tinggi Raharja yang berjudul “Monitoring suhu ruangan berbasis SMS gateway”.
3. Penelitian yang dilakukan oleh Betha Saputra (2013) dari Perguruan Tinggi Raharja yang berjudul “Alat Pendeteksi kebakaran rumah dan pemberi informasi kepada pemilik rumah”.
4. Penelitian yang dilakukan oleh Reza Nursyah Putra (2014) dari Perguruan Tinggi Raharja yang berjudul “Prototype Alat pembersih toren otomatis menggunakan SMS gateway pada STMIK Raharja”.
5. Penelitian yang dilakukan oleh Muhammad Bintar (2013) dari Perguruan Tinggi Raharja yang berjudul “Sistem Pnegontrolan Lampu Mneggunakan Input Suara Berbasis Arduino”
Dari beberapa sumber literature riview di atas, informasi yang diberikan masih terbatas. Sedangkan saat ini kemajuan teknologi sudah berkembang dengan pesat. Untuk itu dibuatlah penelitian yang berjudul “Sistem Alat Penyiram Tanaman Pada Taman Perkotaan Menggunakan Interface VB.NET Berbasis Mikrokontroler ATmega 32u4”.