Pembicaraan:Muhammad Nur Rifai
PROTOTIPE ROBOT PENGANTAR MAKANAN BERBASIS ARDUINO
MEGA DENGAN INTERFACE WEB BROWSER PADA SMK
YUPPENTEK 1 TANGERANG

Disusun Oleh :
NIM |
: 1233473172
|
NAMA |
: Muhammad Nur Rifai
|
JURUSAN SISTEM KOMPUTER
KONSENTRASI CCIT
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
TANGERANG
2016/2017
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PENGESAHAN SKRIPSI
PROTOTIPE ROBOT PENGANTAR MAKANAN BERBASIS ARDUINO
MEGA DENGAN INTERFACE WEB BROWSER PADA SMK
YUPPENTEK 1 TANGERANG
Disusun Oleh :
NIM |
: 1233473172
|
Nama |
: Muhammad Nur Rifai
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: CCIT
|
Disahkan Oleh :
Tangerang, 19 Januari 2017
| Ketua |
Kepala Jurusan
| ||||
| STMIK RAHARJA |
Jurusan Sistem Komputer
| ||||
| (Ir. Untung Rahardja, M.T.I) |
(Ferry Sudarto, S.Kom, M.Pd)
| ||||
| NIP : 99001 |
NIP : 10001
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN PEMBIMBING
PROTOTIPE ROBOT PENGANTAR MAKANAN BERBASIS ARDUINO
MEGA DENGAN INTERFACE WEB BROWSER PADA SMK
YUPPENTEK 1 TANGERANG
Dibuat Oleh :
NIM |
: 1233473172
|
Nama |
: Muhammad Nur Rifai
|
Telah disetujui untuk dipertahankan dihadapan Tim Penguji Ujian Komprehensif
Jurusan Sistem Komputer
Konsentrasi Computer System
Disetujui Oleh :
Tangerang, 19 Januari 2017
| Pembimbing I |
Pembimbing II
| ||
| NID : 06121 |
NID : 07131
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR PERSETUJUAN DEWAN PENGUJI
PROTOTIPE ROBOT PENGANTAR MAKANAN BERBASIS ARDUINO
MEGA DENGAN INTERFACE WEB BROWSER PADA SMK
YUPPENTEK 1 TANGERANG
Dibuat Oleh :
NIM |
: 1233473172
|
Nama |
: Muhammad Nur Rifai
|
Disetujui setelah berhasil dipertahankan dihadapan Tim Penguji Ujian
Komprehensif
Jurusan Sistem Komputer
Konsentrasi Sistem Komputer
Tahun Akademik 2016/2017
Disetujui Penguji :
Tangerang, 19 Januari 2017
| Ketua Penguji |
Penguji I |
Penguji II
| ||
| (_______________) |
(_______________) |
(_______________)
| ||
| NID : |
NID : |
NID :
|
SEKOLAH TINGGI MANAJEMEN DAN ILMU KOMPUTER
(STMIK) RAHARJA
LEMBAR KEASLIAN SKRIPSI
PROTOTIPE ROBOT PENGANTAR MAKANAN BERBASIS ARDUINO
MEGA DENGAN INTERFACE WEB BROWSER PADA SMK
YUPPENTEK 1 TANGERANG
Disusun Oleh :
NIM |
: 1233473172
|
Nama |
: Muhammad Nur Rifai
|
Jenjang Studi |
: Strata Satu
|
Jurusan |
: Sistem Komputer
|
Konsentrasi |
: CCIT
|
Menyatakan bahwa Skripsi ini merupakan karya tulis saya sendiri dan bukan merupakan tiruan, salinan, atau duplikat dari Skripsi yang telah dipergunakan untuk mendapatkan gelar Sarjana Komputer baik di lingkungan Perguruan Tinggi Raharja maupun di Perguruan Tinggi lain, serta belum pernah dipublikasikan.
Pernyataan ini dibuat dengan penuh kesadaran dan rasa tanggung jawab, serta bersedia menerima sanksi jika pernyataan diatas tidak benar.
Tangerang, 19 Januari 2016
Muhammad Nur Rifai
|
| NIM : 1233473172
|
)*Tandatangan dibubuhi materai 6.000;
ABSTRAKSI
Isi disini.
Kata Kunci: disini.
ABSTRACT
Isi disini.
Keywords: disini.
Puji dan syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa yang telah memberikan rahmat-Nya sehingga penulis dapat menyelesaikan laporan Skripsi ini dengan baik. Laporan ini disajikan dalam bentuk buku. Adapun judul yang diambil dalam penyusunan Skripsi ini adalah "Prototipe Robot Pengantar Makanan Berbasis Arduino Mega Dengan Interface Web Browser Pada SMK Yuppentek 1 Tangerang"
Tujuan pembuatan laporan Skripsi ini adalah untuk memenuhi salah satu persyaratan dalam memperoleh gelar Sarjana Komputer (S.Kom) di Perguruan Tinggi Raharja. Sebagai bahan penulisan, data dikumpulkan berdasarkan hasil observasi, wawancara dan sumber literature yang mendukung penulisan ini.
Penulis menyadari bahwa tanpa bimbingan dan dorongan banyak pihak, maka penulis tidak akan dapat menyelesaikan Skripsi ini dengan baik dan tepat waktu. Oleh karena itu penulis menyampaikan ucapan terima kasih kepada pihak-pihak yang telah membantu dalam menyelesaikan laporan Skripsi ini, antara lain :
- Bapak Ir. Untung Rahardja, M.T.I selaku Ketua STMIK Raharja.
- Bapak Sugeng Santoso, M.Kom selaku Pembantu Ketua I Bidang Akademik STMIK Raharja.
- Bapak Ferry Sudarto, S.Kom., M.Pd selaku Kepala Jurusan Sistem Komputer.
- Bapak Asep Saefullah, S.Pd., M.Kom selaku Dosen Pembimbing I, yang telah memberikan banyak bimbingan, masukan, dan semangat sehingga Skripsi ini dapat terselesaikan dengan baik.
- Bapak Endang Sunandar, Ir.,M.Kom selaku Dosen Pembimbing II, yang telah memberikan banyak masukan serta pengarahan dalam penulisan Skripsi ini.
- Bapak dan Ibu Dosen Perguruan Tinggi Raharja yang telah memberikan ilmu pengetahuan kepada penulis.
- Bapak Drs. MASUNI, M.Kom., selaku Stakeholder dalam penyusunan Skripsi ini.
- Kedua Orang Tua, dan Adik yang telah memberikan dukungan, baik moril, materil, maupun doa untuk keberhasilan kepada penulis.
- Terimakasih kepada Arfa, Rinaldi Al Amin, Rifki Rahmatullah, Rangga, Agung Ridzo, Danang Wahyu Ramadhan, Satrio Gunawan Yulianto, Sindi Mujianti, Irfan Affandi, Deni Anggara, Cahyo Anggoro, yang telah memberikan saya semangat dan motivasi.
- Serta semua pihak yang tidak dapat penulis sebutkan satu persatu yang telah ikut membantu dalam penyusunan Laporan Skripsi ini.
Penulis menyadari bahwa dalam penyajian dan penyusunan laporan Skripsi ini masih banyak kekurangan dan kesalahan, baik dalam penulisan, penyajian ataupun isinya. Oleh karena itu, penulis senantiasa menerima kritik dan saran yang bersifat membangun agar dapat dijadikan acuan untuk menyempurnakannya dimasa yang akan datang.
Akhir kata, penulis mengucapkan terima kasih atas perhatian dari pembaca. Semoga Tuhan Yang Maha Esa senantiasa memberikan rahmat-Nya kepada kita semua. Dan semoga laporan Skripsi ini dapat bermanfaat, khususnya bagi penulis dan umumnya bagi seluruh pembaca sekalian
| Tangerang, 19 Januari 2017 | |
| Muhammad Nur Rifai | |
| NIM. 1233473172 |
Daftar isi
- 1 BAB I
- 2 BAB II
- 3 BAB III
- 4 BAB IV
- 5 BAB V
BAB I
Latar Belakang Masalah
Abad ke-21 telah membawa kita ke teknologi baru yang didasarkan pada komunikasi nirkabel serta penggunaan robot saat ini sudah mencakup seluruh sendi atau pekerjaan manusia, Teknologi mulai mengubah kehidupan kita dalam setiap aspek, sehingga dibutuhkan pemikiran-pemikiran yang inovatif dengan menggunakan peralatan yang ada untuk membantu dan mempermudah pekerjaan manusia di masa datang. begitu pula dengan bidang sistem komputer menuntut automatisasi dalam segala hal yang dapat meringankan pekerjaan manusia dan menjadikan segalanya serba praktis dan ekonomis.
Di Indonesia sendiri banyak pekerjaan mengantar makanan contohnya pelayan restoran yang umumnya masih dilakukan dengan cara manual yaitu dengan menggunakan tangan pelayan, berbeda dengan Negara maju seperti Amerika, Jepang dan China yang telah menciptakan robot-robot canggih dengan berbagai fungsi yang berguna untuk membantu pekerjaan atau aktifitas mengantar makanan.
Di Lingkungan sekolah robot pembersih debu dan lantai adalah salah satu contoh robot yang difungsikan di sekolah. Robot yang awalnya diciptakan untuk membantu petugas membersihkan lingkungan sekolah, tetapi peneliti belum pernah mendengar robot pengantar makanan yang difungsikan untuk membantu penjual makanan di kantin sekolah yang bertugas untuk mengantarkan makanan kepada guru.
Berlatar pada kantin SMK Yuppentek 1 Tangerang di mana saat ini sistem pengantar makanan kepada guru umumnya masih sangat bergantung pada peran penjual makanan, untuk mengantarkan makanan yang sifatnya masih manual dengan cara ketika guru memesan makanan kepada penjual makanan dan guru tersebut memerintahkan kepada penjual makanan agar makanan yang di pesan diantarkan keruangannya, maka untuk mengantarkan makanan yang di pesan oleh guru tersebut, penjual makanan berjalan kaki mengantarkan makanan dengan membawa makanan menggunakan tangan penjual makanan.
Berdasarkan beberapa alasan di atas tersebut, maka peneliti mencoba merancang sebuah alat yang berguna membantu peran penjual makanan yang berfungsi mengantarkan makanan kepada guru serta bekerja secara otomatis dikendalikan melalui koneksi nirkabel, dan web browser sebagai user interface-nya, rancangan alat ini dilengkapi tempat yang berguna untuk meletakan makanan, webcam berguna untuk menangkap objek yang berada di depan dan arduino mega sebagai mikrokontrolernya.
Perumusan Masalah
Dalam Rumusan Masalah ini memuat uraian secara rinci dari permasalahan yang diidentifikasi pada latar belakang, adapun Rumusan Masalah dalam penyusunan penelitian ini sebagai berikut :
-
Bagaimana robot berbasis arduino mega bekerja mengantar makanan?
Bagaimana merancang user interface pengendalian robot pengantar makanan pada web browser yang dapat terhubung dengan arduino mega?
Bagaimana webcam pada robot dapat terkoneksi ke web browser?
Ruang Lingkup Penelitian
Sebagai batasan masalah atas penelitian ini agar tetap fokus dan terarah, maka peneliti memberikan Ruang Lingkup laporan sebagai berikut :
-
Alat yang di rancang hanya sebatas simulasi dan tidak seperti robot yang sesungguhnya
Hanya perangkat yang mempunyai web browser yang dapat mengendalikan robot seperti laptop dan smartphone.
Pengontrolan hanya sebatas menggunakan adanya koneksi jaringan wifi yang terhubung dengan esp8266.
Untuk pergerakan badan robot menggunakan 1 buah motor servo, 4 roda gearbox pada robot berfungsi untuk berjalan, tempat makanan berguna untuk meletakan makanan, webcam berguna untuk menangkap objek, arduino mega sebagai mikrokontrolernya dan web browser sebagai interface pengendali robot.
Jarak tempuh robot pengantar makanan pada kantin ke ruang guru kurang lebih berjarak 50 meter dan hanya pada lantai dasar.
Robot digunakan hanya untuk mengantarkan makanan pada guru.
Tujuan dan Manfaat Penelitian
Tujuan Penelitian
Adapun tujuan dari penelitian yang dilakukan adalah sebagai berikut :
Tujuan Individual
-
Memenuhi syarat kelulusan untuk jenjang Strata (S1).
-
Mengimplementasikan dan menerapkan ilmu teknologi informasi dan komunikasi khususnya yang didapatkan selama masa perkuliahan.
Tujuan Fungsional
-
Membuat mekanisme Robot pengantar makanan yang mampu bekerja secara baik yang mampu dihubungkan dan dikendalikan dengan Web Browser.
-
Membantu dan mempermudah penjual makanan dalam hal mengantar makanan kepada guru.
Tujuan Operasional
-
Membantu menyelesaikan masalah yang ada pada lingkungan SMK Yuppentek 1.
-
Merancang sistem kontrol pada web browser untuk mengendalikan pergerakan robot agar nanti dapat digunakan oleh penjual makanan untuk mengantarkan makanan.
Manfaat Penelitian
Sebuah karya yang baik adalah karya yang memiliki banyak manfaat. Adapun manfaat yang dihasilkan dari penelitian ini adalah :
Tujuan Individual
-
Dapat mengembangkan ilmu yang penyusun dapatkan selama perkuliahan.
-
Memaksimalkan dan meningkatkan inovasi dan kreatifitas dalam menciptakan sebuah karya yang mengimplementasikan ilmu creative communication and innovation technology.
-
Memberikan kepuasan karena dapat menciptakan sesuatu yang bermanfaat bagi masyarakat dan khususnya di bidang sistem komputer.
2. Manfaat Fungsional
-
Mempermudah penjual makanan dalam melakukan kegiatan mengantar makanan kepada guru.
-
Mampu meringankan proses pekerjaan manusia dan mampu menggantikan tugas manusia yang berhubungan dengan tugas mengantar makanan.
3. Manfaat Operasional
-
Diharapkan kebutuhan penjual makanan dalam hal mengantarkan makanan tercapai dan terpenuhi dengan baik.
-
Robot pengantar makanan dapat bekerja baik secara terkontrol dan terkendali.
Metode Penelitian
Dalam melakuan penelitian terhadap alat ini maka metode yang peneliti gunakan adalah :
Metode Pengumpulan Data
1. Observasi
Merupakan metode pengumpulan data melalui pengamatan langsung atau peninjauan secara cermat dan langsung di lapangan atau lokasi penelitian. Penelitian ini dilakukan selama kurang lebih 4 bulan pada SMK Yuppentek 1 Tangerang yang menjadi lokasi penelitian guna memperoleh data dan keterangan yang berhubungan dengan jenis penelitian.
2. Wawancara
Merupakan metode pengumpulan data dengan jalan tanya jawab sepihak yang dilakukan secara sistematis dan berlandaskan kepada tujuan penelitian yaitu pada SMK Yuppentek 1 Tangerang. Dalam hal ini proses tanya jawab dilakukan langsung kepada penjual makanan di kantin sekolah tersebut.
3. Studi Pustaka
Metode untuk mengumpulkan informasi dengan mencatat dan mempelajari buku-buku yang berhubungan dengan penelitian ini, Pengumpulan data dilakukan dengan melakukan pencarian melalui situs internet untuk mencari referensi materi yang bisa digunakan sebagai pemecahan masalah yang ada.
Metode Perancangan
Dalam Laporan Skripsi ini Perancangan yang digunakan adalah Metode Perancangan melalui tahap pembuatan Flowchart yang di disain dengan mengikuti cara kerja sistem. Dan pada Perancangan alat menggunakan Diagram Blok, Metode ini dimaksudkan untuk bagaimana sistem itu di rancang dan alat apa saja yang dibutuhkan. Pada pembuatan alat ini, peneliti menggunakan alat seperti: Arduino Mega dengan memanfaatkan Web Browser untuk mengendalikan fungsi robot.
Metode Prototipe
Metode Prototipe yang di gunakan dalam penelitian Skripsi ini adalah Metode Prototipe Evolusioner, karena Metode Prototipe ini secara terus menerus dikembangkan sehingga Prototipe tersebut memenuhi fungsi dan prosedur yang dibutuhkan oleh pengguna.
Metode Pengujian
Pada Metode Pengujian ini peneliti menggunakan Metode Pengujian 'Black Box Testing, 'Black Box Testing' adalah metode uji coba yang memfokuskan pada keperluan Software. Karena itu, uji coba Black Box memungkinkan pengembangan Software untuk membuat himpunan kondisi input yang melatih seluruh syarat-syarat fungsional suatu program. Metode Pengujian Black Box berusaha untuk menemukan kesalahan dalam beberapa kategori, diantaranya fungsi-fungsi yang salah atau hilang.
Metode Analisa
- Metode Analisa Sistem
Pada Metode ini peneliti menganalisa sistem-sistem yang sudah ada dengan beberapa poin pertimbangan, seperti bagaimana cara kerja sistem, apa saja komponen yang membangun sistem tersebut dan juga kekurangan dari sistem tersebut. - Metode Analisa Perancangan Program
Metode Analisa Perancangan Program pada penelitian Skripsi ini, peneliti menggunakan Bagan Alir Program (Flowchart Program).
Sistematika Penulisan
Untuk memudahkan dalam memahami masalah yang akan diungkapkan, maka penulisan SKRIPSI ini di bagi menjadi lima BAB dan beberapa lampiran dengan sistematika yang tersusun sebagai berikut
BAB I PENDAHULUAN
Bab ini berisi tentang Latar Belakang Masalah, Rumusan Masalah, Ruang Lingkup, Tujuan Penelitian, Manfaat Penelitian, Metode Penelitian, dan Sistematika Penulisan yang digunakan dalam penyusunan Laporan.
BAB II LANDASAN TEORI
Bab ini berisikan tentang Teori Umum yang terdiri dari beberapa definisi, teori, dan istilah-istilah umum yang digunakan dalam penulisan laporan penelitian Skripsi. Teori Khusus berisi definisi, teori, dan istilah-istilah yang bersifat khusus atau mendetail yang memiliki relevansi dengan judul penelitian,dan Literature Review yang merupakan beberapa referensi penelitian sejenis dan relevan dengan judul penelitian.
BAB III PEMBAHASAN
Bab ini berisikan Gambaran Umum Perusahaan terdiri dari Profile SMK Yuppentek 1 Tangerang, sejarah singkat SMK Yuppentek 1 Tangerang, Visi dan Misi SMK Yuppentek 1 Tangerang, Struktur Organisasi dan Wewenang Serta Tanggung Jawab, Analisa Sistem, Permasalahan Yang Dihadapi, Alternatif Pemecahan Masalah, Perancangan Prototipe/Alat, Diagram Blok, Flowchart Program, Flowchart Sistem, dan Requirement Elisitasi.
BAB IV HASIL PENELITIAN
Bab ini berisikan Metode Pengujian Alat, Pengujian Black Box Sistem Yang Diusulkan, Pengujian Prototipe Alat, Konfigurasi Sistem Usulan, Implementasi, Hak Akses, Schedule, dan Estimasi Biaya Penelitian atau Pembuatan Alat.
BAB V PENUTUP
Bab ini berisi Kesimpulan dari hasil penelitian dan pengujian alat, beberapa Saran untuk pengembangan lebih lanjut, serta Kesan dalam menjalankan Skripsi.
DAFTAR PUSTAKA
DAFTAR LAMPIRAN
BAB II
Teori Umum
Konsep Dasar Sistem
1. Definisi Sistem
Menurut Taufiq (2013:2)[1]., “Sistem adalah kumpulan dari sub-sub sistem abstrak maupun fisik yang saling terintegrasi dan berkolaborasi untuk mencapai suatu tujuan tertentu”.
Menurut Nasaruddin, dkk dalam Jurnal CCIT Vol.6 No.2 (2013)[2], “Sistem merupakan suatu kumpulan komponen-komponen yang saling berhubungan dan mempunyai ketergantungan satu sama lain, sistem dapat berjalan jika komponen-komponen yang ada di dalamnya bisa bekerja sama membentuk suatu lingkaran yang tidak dapat dipisahkan”.
Berdasarkan pendapat yang dikemukakan diatas, maka dapat disimpulkan Sistem adalah sekelompok unsur yang saling terhubung satu sama lain yang berfungsi bersama-sama untuk mencapai tujuan tertentu.
2. Karakteristik Sistem
Menurut Edhi Sutanta di dalam buku A.Rusdiana dan Moch.Irfan (2014:35)[3], Karakteristik Sistem sebagai berikut :
- Komponen Sistem (Components)
Komponen Sistem adalah segala sesuatu yang menjadi bagian penyusunan Sistem. Komponen sistem dapat berupa benda nyata ataupun abstrak. Komponen sistem disebut sebagai sub sistem - Batasan Sistem (Boundary)
Batas Sistem diperlukan untuk membedakan satu sistem dengan sistem yang lain. Tanpa adanya batas sistem, sangat sulit untuk memberikan batasan scope tinjauan terhadap sistem. - Lingkungan Sistem (Environtment)
Lingkungan Sistem adalah segala sesuatu yang berada di luar sistem lingkungan sistem dapat menguntungkan ataupun merugikan. Umumnya lingkungan yang menguntungkan akan selalu dipertahankan untuk menjaga keberlangsungan sistem, sedangkan lingkungan sistem yang merugikan akan diupayakan agar mempunyai pengaruh seminimal mungkin, bahkan ditiadakan. - Penghubung/Antarmuka (Interface)
Penghubung/Antarmuka merupakan sarana memungkinkan setiap komponen sistem, yaitu segala sesuatu yang bertugas menjebatani hubungan antar komponen dalam sistem. Penghubung/antarmuka merupakan sarana setiap komponen saling berinteraksi dan berkomunikasi. Energi yang dimasukan kedalam sistem, yang dapat berupa pemeliharaan (maintenance input) dan sinyal (signal input). Contoh, di dalam suatu unit sistem komputer, “program” adalah maintenance input yang digunakan untuk mengoperasikan komputernya dan “data” adalah signal input untuk diolah menjadi informasi. - Masukan Sistem (Input)
Masukan merupakan komponen sistem, yaitu segala sesuatu yang perlu dimasukan ke dalam sistem sebagai bahan yang akan di olah lebih lanjut untuk menghasilkan keluaran (output) yang berguna. - Pengolahan (Processing)
Pengolahan merupakan komponen sistem yang mempunyai peran utama mengolah masukan agar menghasilkan output yang berguna bagi para pemakainya. - Keluaran Sistem (Output)
Keluaran merupakan komponen sistem yang berupa berbagai macam bentuk keluaran yang dihasilkan oleh komponen pengolahan. - Sasaran Sistem (Objective)
Setiap komponen dalam sistem perlu di jaga agar saling bekerja sama agar mampu mencapai sasaran dan tujuan sistem. - Kendali (Control)
Setiap komponen dalam sistem perlu di jaga agar tetap bekerja sesuai dengan peran dan fungsinya masing-masing. - Umpan Balik(Feed Back)
Umpan Balik diperlukan oleh bagian kendali (kontrol) sistem untuk mengecek terjadinya penyimpanan proses dalam sistem dan mengembalikannya pada kondisi normal. Mengelola kemampuan diri dan orang lain
Keterampilan dalam menyelesaikan tugas.
Cakap berkomunikasi dan beradaptasi.
Tanggap terhadap iptek dan lingkungan.
Memiliki moral dan budi pekerti luhur berdasarkan agama.
Meningkatkan IMTAQ (Iman dan Taqwa) peserta didik kepada Tuhan Yang Maha Esa sebagai dasar untuk mengimplementasikan pengetahuan, keterampilan, dan sikapnya dalam mempertahankan eksistensinya, dilingkungan masyarakat dan masyarakat global.
Mempesiapkan peserta didik menjadi manusia produktif, mampu bekerja mandiri, dan dapat di serap oleh DU/DI (Dunia Usaha/Industri) sebagai tenaga kerja tingkat menengah sesuai dengan kompentensi yang dimilikinya.
Memberikan pembekalan agar mampu berkarir, ulet dan giat dalam berkompetensi, mampu beradaptasi dilingkungan kerja dan dapat mengembangkan sikap profesional sesuai kompetensi yang dimilikinya.
Membekali peserta didik dengan ilmu pengetahuan, teknologi, seni dan wawasan entreuprener agar mampu mengembangkan diri di kemudian hari baik secara mandiri maupun melanjutkan pada jenjang pendidikan yang lebih tinggi
Melatih peserta didik sehingga memiliki kemampuan untuk beradaptasi dangan perubahan dan perkembangan IPTEK (Ilmu Pengetahuan dan Teknologi) dalam semangat melestarikan keutuhan bangsa.
Pembinaan kesiswaan.
Keterampilan dalam menyelesaikan tugas.
Pelaksana bimbingan dan penilaian guru dan tenaga pendidikan lainnya
Penyelenggara administrasi sekolah meliputi administrasi ketenagaan, keuangan, kesiswaan, perlengkapan dan kurikulum
Menyampaikan aspirasi para wali murid pada rapat dengan pihak sekolah.
Keterampilan dalam menyelesaikan tugas.
Mengawasi jalannya pelaksanaan kegiatan proses belajar mengajar.
Merencanakan program pembangunan dan kegiatan proses belajar mengajar
Penyusunan laporan program kerja Tata Usaha.
Pengolah keuangan sekolah
Mengawasi jalannya pelaksanaan kegiatan proses belajar mengajar.
Pengurusan administrasi ketenagaan dan siswa
Menyusun program dan jadwal kegiatan pelajaran
Menyusun pembagian tugas mengajar
Menyusun jadwal evaluasi.
Menyusun program pelaksana UAS/UAN (Ujian Akhir Sekolah/Ujian Akhir Nasional) dan kenaikan kelas.
a. Menyusun program pembinaan kesiswaan bersama Pembina OSIS.
Mengkoordinasikan pelaksanaan bimbingan, pengarahan dan pengendalian kegiatan siswa / OSIS (Organisasi Siswa Intra Sekolah) dalam rangka menegakkan di siplin dan tata tertib sekolah.
Mengkoordinasikan pelaksanaan kebersihan, keindahan, keamanan, ketertiban, kerindangan dan kesehatan.
Mengkoordinasikan, pengarahan dalam pembinaan pengurusan OSIS (Organisasi Siswa Intra Sekolah) dalam berorganisasi.
Power Supply merupakan catu daya untuk memberikan tegangan dan menjadi bagian inti untuk memberikan daya kepada Arduino Mega, Motor DC dan Motor Servo.
Aduino Mega sebagai platform atau otak inti yang digunakan untuk komunikasi antara web browser dengan Arduino Mega melalui esp8266, Arduino Mega merupakan kontroler untuk memproses data yang di kirim oleh web browse
Modul ESP8266 merupakan penghubung antara web browser dengan Arduino Mega menggunakan media komunikasi nirkabel (internet).
Web Browser sebagai input pengontrolan di mana didalamnya terdapat interface berupa beberapa tombol yang berfungsi untuk mengendalikan robot
Webcam berfungsi untuk menampilkan objek yang berada di depan robot secara real time
Motor DC merupakan alat penggerak gearbox roda yang berfungsi agar robot bisa berjalan.
Motor Servo merupakan alat penggerak badan robot ke kiri dan ke kanan.
Laptop
Solder Timah
Solder Karet
Software Arduino IDE (untuk menulis program)
Software Fritzing (untuk menggambar skematik rangkaian)
Software Edraw Max (untuk membuat flowchart, diagram blok, dan rancangan prototipe alat)
Arduino Mega 2560 (R3)
Motor DC
ESP8266
Motor Servo
Gearbox Roda
Webcam
Komponen Elektronika
Adapter Switch 12 V
Printed circuit board
Kaca Arklirik
Pada jalur merah sebagai arus positif (+), yang menghubungkan power supply 12V dengan switch, ELCO 1000 mf/25v, indikator power, resistor 10KΩ, IC regulator LM7805, dan kapasitor 100mf/16v.
Pada jalur hitam sebagai arus negatif (-), yang menghubungkan power supply 12V dengan switch, ELCO 1000 mf/25v, indikator power, IC regulator LM7805, dan kapasitor 100mf/16v.
Pada jalur hitam sebagai arus negatif (-), yang menghubungkan arduino uno pada pin GND ke kaki lampu indikator.
Pada jalur biru sebagai jalur data, antara arduino mega dengan lampu indikator.
Pada jalur merah sebagai arus positif (+), yang menghubungkan power supply 12V, switch, ELCO 1000 mf/25v, indikator power, resistor 10KΩ, IC regulator LM7805, dan kapasitor 100mf/16v dengan L293D yang berfungsi untuk menggerakkan Motor DC.v
Pada jalur hitam sebagai arus negatif (-), yang menghubungkan power supply 12V, switch, ELCO 1000 mf/25v, indikator power, IC regulator LM7805, dan kapasitor 100mf/16v dengan L293D yang berfungsi untuk menggerakkan Motor DC, pin yang digunakan adalah pin GND pada arduino mega.
Jalur kuning sebagai jalur PWM (Pulse Width Modulation), yaitu pergerakkan dengan sinyal pulse untuk menggerakkan Motor DC.
Jalur hijau sebagai jalur komunikasi serial untuk menggerakkan Motor DC.
Jalur biru sebagai jalur data, untuk menggerakkan Motor DC.
Pada jalur merah sebagai arus positif (+), yang menghubungkan power supply 12V, switch, ELCO 1000 mf/25v, indikator power, resistor 10KΩ, IC regulator LM7805, dan kapasitor 100mf/16v yang berfungsi untuk menggerakan Motor Servo.
Pada jalur hitam sebagai arus negatif (-), yang menghubungkan power supply 12V, switch, ELCO 1000 mf/25v, indikator power, IC regulator LM7805, dan kapasitor 100mf/16v yang berfungsi untuk menggerakkan Motor Servo, pin yang digunakan adalah pin GND pada arduino mega.
Pada jalur kuning sebagai jalur kontrol untuk motor servo yang dapat dihubungkan dengan pin arduino mega pada pin digital 5
Pada jalur merah untuk tegangan positif sebesar +5v dc yang di ambil dari arduino mega.
Pada jalur hitam yang berfungsi sebagai ground (GND).
Pada jalur hijau sebagai jalur komunikasi serial..
Pada jalur merah untuk tegangan positif sebesar +5v dc yang di ambil dari arduino mega.
Pada jalur hitam yang berfungsi sebagai ground (GND).
Pada hijau sebagai jalur komunikasi serial, yaitu RX dan TX.
Pada jalur merah sebagai arus positif (+).
Pada jalur hitam sebagai arus negatif (-).
Pada jalur biru sebagai jalur data.
Pada jalur hijau sebagai jalur komunikasi serial.
Pada jalur kuning sebagai jalur PWM (Pulse Width Modulation), yaitu pergerakkan dengan sinyal pulse.
M pada MDI artinya Mandatory (dibutuhkan atau penting) Maksudnya, elisitasi tersebut harus ada dan tidak boleh dihilangkan pada saat membuat sistem baru.
D pada MDI artinya Desirable (diinginkan atau tidak terlalu penting) Maksudnya, elisitasi tersebut tidak terlalu penting dan boleh dihilangkan, tetapi jika elisitasi tersebut digunakan dalam pembuatan sistem maka membuat sistem tersebut lebih sempurna.
I pada MDI artinya Inessential (di luar sistem atau dieliminasi) Maksudnya, adalah elisitasi tersebut bukan bagian dari sistem yang di bahas dan merupakan bagian dari luar sistem.
T (Technical) Maksudnya, adalah pertanyaan perihal bagaimana tata cara atau teknik pembuatan elisitasi tersebut dalam sistem yang diusulkan?
O (Operational) Maksudnya, adalah pertanyaan perihal bagaimana tata cara penggunaan elisitasi tersebut dalam sistem yang akan dikembangkan?
E (Economic) Maksudnya, adalah pertanyaan perihal berapakah biaya yang diperlukan guna membangun elisitasi tersebut didalam sistem?
L (Low) : Mudah untuk dikerjakan.
M (Middle) : Mampu untuk dikerjakan.
H (High) : Sulit untuk dikerjakan karena teknik pembuatan dan penggunaannya sulit serta biayanya mahal, sehingga elisitasi tersebut harus dieliminasi.
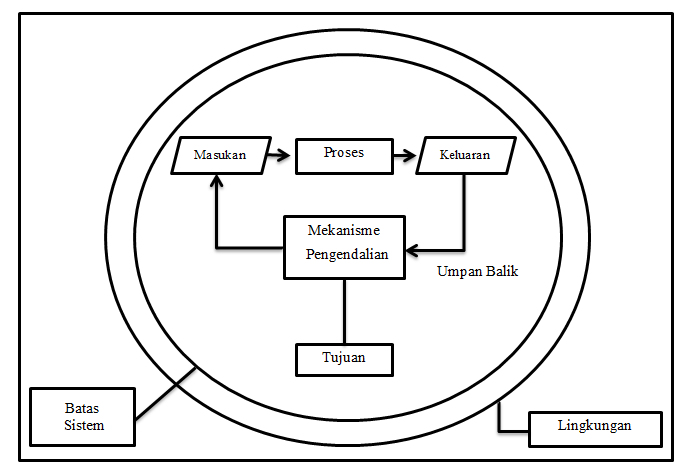
Sumber: Rusdiana dan Irfan (2014:40). [3]
Gambar 2.1. Karakteristik Sistem.
BAB III
Gambaran Umum SMK Yuppentek 1 Tangerang
Bermodalkan semangat untuk memajukan Dunia Pendidikan di Tangerang, khususnya pendidikan Sekolah Teknik Menengah (STM) pada 48 Tahun lalu. lahirlah Yayasan Usaha Peningkatan Pendidikan Teknologi (YUPPENTEK) memenuhi tugas mulia bagi kebutuhan Pendidikan Masyarakat Tangerang. Berlokasi di Jalan Veteran No.1 Kota Tangerang, kini SMK Yuppentek 1 Tangerang memiliki 4 buah program kejuruan.
Sejarah Singkat SMK Yuppentek 1 Tangerang
Sekolah ini berdiri sejak Tahun 1968, dengan sebutan Sekolah Teknologi Menengah (STM) Yuppentek, akhirnya Bupati tangerang tertanggal 16 Januari 1968 mengeluarkan SK Bupati Kepala Daerah Tingkat II Kabupaten Tangerang No.16/17/Kpts/1968 tentang Pembentukan Badan Pembina STM Tangerang, Dalam perjalanan akhirnya tanggal dikeluarkanya SK Bupati Tangerang di atas dijadikan titik kelahiran STM Yuppentek Tangerang, Bupati Kepala Daerah Tingkat II Kabupaten Tangerang No.16/17/Kpts/1968 Tentang Pembentukan Badan Pembina STM Tangerang, telah mengalami beberapa kali ganti nama/istilah, perkembangan dunia pendidikan yang di kelola Yuppentek pun bergerak maju seiring perkembangan zaman, situasi dan kondisi.

Gambar 3.1. Halaman Smk Yuppentek 1 Tangerang
Pada Tahun 1968-1972 Sesuai dengan SK Bupati Kepala Daerah Tingkat II Tangerang itu, Kemudian gagasan pendirian Sekolah Teknik Menengah (STM) Tangerang, Berdasarkan konsultasi dengan kantor Inspektorat Provinsi Pendidikan dan Teknik (Inpro Dik Tek) DKI jakarta diusulkan berdirinya STM yang pertama di buka 2 jurusan, yaitu jurusan Listrik dan Bangunan Gedung, Jumlah siswa pertama kali didirikanya STM ini tercatat Hanya 65 orang yang didik oleh 17 guru, Pada masa ini pula di tunjuk Suharmo Bc.G, Kepala Meteorologi Tangerang menjadi Kepala Sekolahnya, Sementara operasional pendidik dan perakteknya memanfaatkan gedung dan fasilitasnya STN (Sekolah Teknik Negeri) IX Tangerang, Setelah ini sekolah mengalami sejumlah perubahan nama, semulanya di beri nama STM Persiapan Negeri, lalu menjadi STM Berbantuan Negeri, berubah lagi menjadi STM Pemda Tangerang, akhirnya berdasarkan Akta Notaris NO.58 tertanggal 16 februari 1979 di buat Akta Notaris dengan Nama Yayasan Usaha Peningkatan Pendidikan Teknologi di singkat (YUPPENTEK) yang berkedudukan di Tangerang, Susunan Badan Pengurus Yuppentek sesuai Akta Notaris ini, maka nama sekolah inipun berubah menjadi STM Yuppentek, sesuai Akta pendirian Yayasan, Yuppentek didirikan dengan maksud dan tujuan dalam pengembangan bidang pendidikan kesehatan dan sosial.
Visi Misi SMK Yuppentek 1 Tangerang
1. Visi SMK Yuppentek 1 Tangerang
Menjadi sekolah pilihan masyarakat dan menghasilkan lulusan yang dapat beradaptasi serta eksis di lingkungan dan masyarakat global.
2. Misi SMK Yuppentek 1 Tangerang
Tujuan SMK Yuppentek 1 Tangerang
Tujuan SMK Yuppentek 1 Tangerang adalah :
Struktur Organisasi SMK Yuppentek 1 Tangerang
Struktur organisasi sangat penting bagi sebuah perusahaan maupun organisasi karena digunakan untuk memudahkan, mengkoordinasikan dan menyatukan usaha untuk menunjukan pola tetap hubungan-hubungan diantara fungsi, bagian-bagian maupun tugas dan wewenang serta tanggung jawab masing-masing dalam suatu perusahaan yang merupakan suatu keharusan bagi sebuah perusahaan maupun organisasi.
Sama halnya dengan SMK Yuppentek 1 Tangerang yang mempunyai struktur organisasi manajemen sebagai berikut:

Gambar 3.2. Struktur Organisasi Smk Yuppentek 1 Tangerang
Wewenang dan Tanggung Jawab
Berikut adalah wewenang dan tanggung jawab bagian-bagian yang ada pada SMK Yuppentek 1 Tangerang, diantaranya sebagai berikut:
Kepala Sekolah
Komite Sekolah
Tata Usaha
Kurikulum
Kesiswaan
Tata Laksana Sistem Berjalan
Prosedur Sistem Yang Berjalan
Prosedur Sistem Yang Berjalan sebelumnya adalah untuk mengantarkan makanan kepada guru, tentunya masih dilakukan secara manual menggunakan tangan penjual makanan. ketika guru memesan makanan kepada penjual makanan dan guru tersebut memerintahkan kepada penjual makanan agar makanan yang di pesan diantarkan keruangannya, maka untuk mengantarkan makanan yang di pesan oleh guru tersebut, penjual makanan berjalan kaki mengantarkan makanan dengan membawa makanan menggunakan tangan penjual makanan, Hal ini cukup menguras tenaga dan waktu bagi penjual makanan.
Rancangan Prosedur Sistem Yang Berjalan
Flowchart Sistem Yang Berjalan
Untuk menganalisa sistem yang berjalan, pada penelitian ini digunakan teknik pembacaan melalui flowchart diagram untuk mempermudah pembacaan sistem yang berjalan, Di bawah ini adalah gambaran diagram sistem flowchart penjual makanan:

Gambar 3.3. Flowchart Sistem Berjalan
Berdasarkan flowchart pada gambar 3.2. Pada saat mengantarkan makanan masih dilakukan secara manual, dengan cara penjual makanan berjalan kaki mengantarkan makanan dengan membawa makanan menggunakan tangan penjual makanan.
Flowchart Sistem Yang Diusulkan
Pada rancangan sistem yang diusulkan ini adalah dengan adanya sebuah robot pengantar makanan yang bisa dikendalikan melalui web browser, diharapkan dapat memberikan kemudahan dalam kegunaannya. Karena, permasalahan yang sering dihadapi oleh penjual makanan adalah dalam hal mengantarkan makanan kepada guru yang sifatnya masih dilakukan secara manual.
Bagi penjual makanan hal ini cukup menguras tenaga dan waktu, serta dapat berpengaruh pada keefektifan kerja. Berikut adalah flowchart robot pengantar makanan yang bisa dikendalikan melalui web browser yang diusulkan pada gambar 3.3.

Gambar 3.4. Flowchart Sistem Yang Diusulan
Rangkaian Keseluruhan Alat
Perancangan Prototipe
Dalam Perancangan Prototipe ini di bentuk dengan menyerupai robot simulasi humanoid, rancangan ini dilengkapi dengan komponen seperti: arduino mega sebagai mikrokontrolernya, modul esp8266 berguna untuk komunikasi antara web browser dengan arduino mega, motor dc berguna untuk menggerakan roda agar bisa berjalan, motor servo berguna untuk menggerakan badan robot, dan juga webcam berguna untuk melihat objek yang berada di depan robot, Bahan dalam membuat prototipe tersebut terbuat dari plastik dan kaca akrilik.

Gambar 3.5. Perancangan Prototipe
Perancangan Prototipe
Metode Prototipe yang digunakan dalam penelitian skripsi ini adalah metode prototipe evolusioner, yang artinya adalah suatu pengembangan sistem yang sudah ada, perbandingan antar sistem yang sudah ada dengan sistem yang di usulkan dan akan di jelaskan sebagai berikut:.

Tabel 3.1. Perbandingan Sistem
Cara Kerja Alat
Input, Proses dan Output

Gambar 3.6. Alur Kerja Alat
a. Input
Proses Input terjadi pada saat ip address robot di akses melalui web browser yang kemudian akan menampilkan interface menu pengendali berupa beberapa tombol button yang berfungsi sebagai pengendali robot ketika tombol tersebut di tekan.
b. Proses
Proses terjadi pada saat salah satu tombol button di tekan, maka tombol tersebut akan mengirimkan informasi kepada arduino mega melalui esp8266, informasi yang di terima akan diproses oleh arduino mega dengan mengubah sinyal analog menjadi sinyal digital berupa kode ASCII (American Standard Code for Information Interchange) yaitu kode standar internasional untuk pertukaran informasi dalam kode huruf dan simbol. Setiap perintah mempunyai masing-masing kode tersendiri. Setelah diolah menjadi data, arduino mega akan mengambil keputusan untuk bertindak.
c. Output
Setelah terjadi Input dan Proses pada alat, maka Output sudah dapat dihasilkan. Yaitu, motor dc pada robot berfungsi untuk menggerakan gearbox roda agar robot bisa berjalan, motor servo berfungsi untuk menggerakan badan robot ke kiri dan ke kanan, serta webcam berguna untuk menangkap objek yang berada di depan secara real time.
Diagram Blok
Dalam perancangan perangkat keras atau hardware ini dibutuhkan beberapa komponen elektronika, perlengkapan mekanik dan perangkat penunjang agar sistem dapat bekerja dan berjalan dengan baik sesuai dengan fungsinya, Agar mudah dipahami maka peneliti membuat Diagram Blok seperti gambar berikut ini.

Gambar 3.7. Diagram Blok
Keterangan dan penjelasan beserta uraian deskripsi kerja pada Diagram Blok di atas adalah sebagai berikut:
Pembuatan Alat
Pada perancangan ini meliputi perancangan perangkat keras (hardware) dan perangkat lunak (software). Gambaran secara umum berupa diagram blok rancangan alat adalah seperti yang ditunjukkan pada gambar 3.7. alat yang di rancang akan membentuk suatu “Prototipe Robot Pengantar Makanan Berbasis Arduino Mega Dengan Interface Web Browser”. Perancangan sistem secara keseluruhan memerlukan beberapa alat dan bahan yang digunakan untuk memenuhi kebutuhan dalam pembuatan sistem, adapun deskripsi alat dan bahan sebagai berikut:
a) Alat-alat yang digunakan
b) Bahan-bahan yang digunakan
Perangkat Keras (Hardware)
Membuat Rancangan Skematik Hardware
Dalam membuat rancangan skematik hardware diperlukan aplikasi fritzing. aplikasi fritzing berguna untuk merancang rangkaian elektronika yang sudah mendukung library-library arduino mega dan untuk memulainya dapat di lihat seperti gambar berikut ini.

Gambar 3.8. Membuka Aplikasi Fritzing
Setelah melakukan langkah di atas maka akan muncul tampilan utama pada layar kerja fritzing dan dapat terlihat seperti gambar berikut.

Gambar 3.9. Halaman Utama Aplikasi Fritzing
Setelah melakukan langkah di atas maka langkah selanjutnya adalah membuat rangkaian hardware dengan cara masuk ke tampilan breadboard dimana tampilan tersebut digunakan untuk mengimpor komponen yang ada toolbox di jendela part-nya. Adapun tampilannya akan terlihat seperti gambar berikut.

Gambar 3.10. Memasukkan Komponen Pada Breadboard.
Rangkaian Catu Daya
Agar alat yang di buat dapat bekerja sesuai dengan fungsinya, maka diperlukan sumber tegangan listrik sebagai catu daya. Rangkaian catu daya yang digunakan mendapatkan sumber tegangan dari adaptor switching dengan output 12 volt. Tegangan tersebut kemudian diturunkan menjadi 5 volt tegangan DC, melalui IC regulator LM7805. Arus yang masuk dari adaptor switching akan melalui kapasitor yang bertujuan untuk mengurangi noise pada tegangan DC.
Setelah itu keluaran dari kapasitor tersebut masuk ke IC regulator yang fungsinya adalah untuk menstabilkan tegangan. IC regulator ini terdiri dari dua buah IC, yaitu LM7805 yang menghasilkan tegangan +5 volt. Keluaran dari IC regulator ini kemudian akan masuk kembali ke kapasitor agar tegangan DC yang dikeluarkan dapat lebih halus lagi (smooth).
Pada rangkaian catu daya ini menggunakan 2 (dua) buah sumber output catu daya, yang akan digunakan terpisah untuk memberikan tegangan kerja pada masing-masing rangkaian. Rangkaian yang menggunakan tegangan sebesar +5 volt DC adalah motor dc dan motor servo. Berikut adalah rangkaian catu daya yang ditunjukan pada gambar 3.11.

Gambar 3.11. Rangkaian Catu Daya.
Keterangan:
Rangkaian Lampu LED
Lampu LED atau kepanjangannya (Light Emitting Diode) adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki fungsi untuk menunjukkan status dari perangkat elektronika tersebut. Lampu LED digunakan sebagai lampu indikator dari sistem. Prinsip kerja dari rangkaian lampu LED adalah ketika pada saat mendapatkan input dari web browser ataupun sebaliknya maka lampu tersebut akan menyala ataupun mati. Rangkaian lampu LED tidak membutuhkan power eksternal karena daya yang dibutuhkan sangat kecil, dan cukup langsung dihubungkan dengan mikrokontroler. Berikut adalah rangkaian lampu LED yang ditunjukan pada gambar 3.12.

Gambar 3.12. Rangkaian Lampu LED.
Keterangan:
Rangkaian Motor DC
Pada Rangkaian Motor DC ini, ditampilkan bagaimana driver Motor IC L293D dihubungkan ke Motor DC, Sehingga Motor dapat di ubah arah putaran Motor dengan memberikan polaritas yang di balik, yang akan menyebabkan Motor dapat bergerak dengan arah yang berlawanan maupun searah dengan jarum jam. Berikut adalah rangkaian Motor DC yang ditunjukan pada gambar 3.13.

Gambar 3.13. Rangkaian Motor DC.
Keterangan:
Rangkaian Motor Servo
Pada Rangkaian Motor Servo ini, hanya akan ditampilkan bagaimana Motor Servo yang di kontrol oleh arduino mega. Sehingga Motor dapat di ubah arah putaran Motor dengan memberikan polaritas yang di balik, yang akan menyebabkan Motor Servo dapat bergerak. Berikut adalah Rangkaian Motor Servo yang ditunjukan pada gambar 3.14.

Gambar 3.14. Rangkaian Motor Servo.
Keterangan:
Rangkaian Webcam
Pada Rangkaian Webcam ini berfungsi sebagai media untuk menangkap gambar yang berupa video secara real time, pemanfaatan sebuah webcam dalam sistem yang di buat bukan untuk mengontrol dari cara kerja sistem mikrokontroller tetapi hanya sebatas menampilkan gambar saja yang berupa video. Berikut adalah Rangkaian Webcam yang ditunjukan pada gambar 3.15.

Gambar 3.15. Rangkaian Webcam.
Keterangan:
Rangkaian Esp8266
Pada Rangkaian Esp8266 ini berfungsi sebagai media komunikasi atau gateway antara web browser dengan arduino mega. Berikut adalah Rangkaian Esp8266 yang ditunjukan pada gambar 3.16.

Gambar 3.16. Rangkaian Esp8266.
Keterangan:
Rangkaian Sistem Keseluruhan
Setelah melakukan perancangan perangkat keras dari seluruh komponen dan bahan yang digunakan, maka Rangkaian Sistem Keseluruhan akan terlihat seperti gambar 3.17 sebagai berikut :
Gambar 3.17. Rangkaian Keseluruhan.
Keterangan:
Perangkat Lunak (Software)
Perancangan Software Arduino
Pada perancangan perangkat lunak akan menggunakan program Arduino digunakan untuk menuliskan listing program dan menyimpannya dengan file yang berekstensi .pde, dan bootloader Arduino Mega sebagai media yang digunakan untuk mengupload program ke dalam mikrokontroller, sehingga mikrokontroller dapat bekerja sesuai dengan yang diperintahkan. Dan berikut adalah gambar listing program keseluruhan yang digunakan dengan demikian Baru sistem arduino dapat bekerja sesuai dengan apa yang diinginkan.

Gambar 3.18. Tampilan Awal Software Arduino
Dan berikut adalah gambar listing program keseluruhan yang digunakan dengan demikian baru sistem arduino dapat bekerja sesuai dengan apa yang diinginkan. Setelah langkah pada gambar di atas dilakukan, agar sistem dapat bekerja sesuai dengan yang dinginkan, selanjutnya lakukan penulisan listing program secara keseluruhan.

Gambar 3.19. Tampilan program secara keseluruhan
Konsep Perancangan Interface Web Browser
Robot ini dikendalikan secara langsung melalui media wireless dengan interface sebuah web browser. Tampilan web page sebagai kendali robot ini di rancang sesederhana mungkin agar pengguna mudah untuk mengoperasikanya.

Gambar 3.20. Perancangan Interface Web Browser
Keterangan dari setiap fungsi masing-masing kolom dalam Perancangan web interface adalah sebagai berikut:

Tabel 3.2. Keterangan Fungsi Tombol Web Interface
Permasalahan Yang Dihadapi Dan Alternatif Pemecahan Masalah
Permasalahan Yang Dihadapi
Permasalahan yang dihadapi oleh penjual makanan adalah dalam hal mengantar makanan yang sifatnya masih dilakukan secara manual, yaitu ketika guru memesan makanan kepada penjual makanan dan guru tersebut memerintahkan kepada penjual makanan agar makanan yang di pesan diantarkan keruangannya, maka untuk mengantarkan makanan yang di pesan oleh guru tersebut, penjual makanan berjalan kaki mengantarkan makanan dengan membawa makanan menggunakan tangan penjual makanan. Hal ini di rasa cukup melelahkan karna penjual makanan harus bolak-balik untuk mengantarkan makanan dan kurang efektif karna dapat menguras waktu bagi penjual makanan.
Alternatif Pemecahan Masalah
Setelah dijabarkan permasalahan yang sedang dihadapi di atas, maka peneliti akan membuatkan alternatif pemecahan masalah, yaitu dengan membuat dan merancang sebuah robot pengantar makanan yang dapat membantu penjual makanan mengantarkan makanan, robot yang di rancang memiliki tempat yang berguna untuk meletakkan makanan, dan dapat dikendalikan melalui web browser, komunikasi antara web browser dan robot menggunakan esp8266 yang berfungsi menangkap sinyal wifi sehingga dapat dikendalikan secara jarak jauh, serta webcam berguna untuk menangkap objek yang berada di depan robot dan arduino mega sebagai mikrokontrolernya. Dengan adanya sistem ini diharapkan bisa lebih efektif dalam hal mengantarkan makanan khususnya bagi penjual makanan.
User Requirement
Elisitasi Tahap I
Berdasarkan hasil observasi dan wawancara yang dilakukan dengan pihak stakeholder mengenai sistem yang akan diusulkan, adapun beberapa kebutuhan yang diperlukan untuk membangun sistem yang diinginkan. Kebutuhan-kebutuhan tersebut disusun ke dalam Tabel Elisitasi Tahap I sebagai berikut :
ELISITASI I
Elisitasi Tahap II
Elisitasi Tahap II merupakan hasil pengklasifikasian dari elisitasi tahap I berdasarkan Metode MDI. Metode MDI ini bertujuan untuk memisahkan antara rancangan sistem yang penting dan harus ada pada sistem baru dengan rancangan yang disanggupi oleh peneliti untuk dieksekusi
ELISITASI II
Keterangan:
Elisitasi Tahap III
Elisitasi Tahap III merupakan hasil penyusutan dari Elisitasi Tahap II dengan cara mengeliminasi semua requirement yang optionnya "I" pada metode MDI. Selanjutnya semua requirement yang tersisa diklasifikasikan kembali dengan metode TOE. Berikut ini adalah penjelasan mengenai TOE :
Metode tersebut di bagi kembali menjadi beberapa option, antara lain:
ELISITASI III
Final Elisitasi
Final Draft Elisitasi merupakan bentuk akhir dari tahap-tahap elisitasi yang dapat dijadikan acuan dan dasar untuk mengimplementasikan sistem pengantar makanan berbasis arduino mega menggunakan interface web browser. Berdasarkan Elisitasi Tahap III di atas, dihasilkan Final Draft Elisitasi yang diharapkan dapat mempermudah peneliti dalam mengimplementasikan sistem.
FINAL ELISITASI
BAB IV
BAB V
Kesalahan pengutipan: Tag <ref> ditemukan, tapi tag <references/> tidak ditemukan